JP7622832B2 - 制限速度認識方法及び制限速度認識装置 - Google Patents
制限速度認識方法及び制限速度認識装置 Download PDFInfo
- Publication number
- JP7622832B2 JP7622832B2 JP2023523925A JP2023523925A JP7622832B2 JP 7622832 B2 JP7622832 B2 JP 7622832B2 JP 2023523925 A JP2023523925 A JP 2023523925A JP 2023523925 A JP2023523925 A JP 2023523925A JP 7622832 B2 JP7622832 B2 JP 7622832B2
- Authority
- JP
- Japan
- Prior art keywords
- speed limit
- vehicle
- signs
- limit signs
- road
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
- B60W30/146—Speed limiting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/761—Proximity, similarity or dissimilarity measures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/768—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using context analysis, e.g. recognition aided by known co-occurring patterns
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/582—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of traffic signs
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/09623—Systems involving the acquisition of information from passive traffic signs by means mounted on the vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Databases & Information Systems (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Computing Systems (AREA)
- Artificial Intelligence (AREA)
- General Health & Medical Sciences (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
Description
本発明は、カメラにより取得した撮像画像から複数の速度制限標識が認識された場合における制限速度の認識精度を向上することを目的とする。
本発明の目的及び利点は、特許請求の範囲に示した要素及びその組合せを用いて具現化され達成される。前述の一般的な記述及び以下の詳細な記述の両方は、単なる例示及び説明であり、特許請求の範囲のように本発明を限定するものでないと解するべきである。
図1は、実施形態の運転支援装置を搭載する車両の概略構成の一例を示す図である。車両1に搭載された運転支援装置10は、センサ11と、測位装置12と、地図データベース(地図DB)13と、車載機器14と、ナビゲーションシステム15と、表示装置16と、音声出力装置17と、入力装置18と、車両挙動制御装置19と、コントローラ20を備える。これらの装置は、相互に情報の送受信を行うために、たとえばCAN(Controller Area Network)その他の車載LANによって接続されている。
また、三次元高精度地図情報は、道路の制限速度を示す制限速度情報を含んでいる。制限速度情報は、例えば道路や車線に対応付けられて、対応付けた道路や車線の制限速度を指定する情報であってもよく、制限速度標識の設置位置とその制限速度の情報であってもよい。
ナビゲーションシステム15は、測位装置12から車両1の現在の位置情報を取得し、ナビゲーション用の地図情報に車両1の位置を重ね合わせてディスプレイなどに表示する。また、ナビゲーションシステム15は、目的地が設定された場合に、その目的地までのルートを設定し、設定したルートを乗員に案内するナビゲーション機能を備える。このナビゲーション機能は、ディスプレイの地図上にルートを表示し、音声等によってルートを乗員に知らせる。ナビゲーションシステム15で設定されたルートは、コントローラ20が備えるルート走行支援機能でも利用される。ルート走行支援機能は、設定されたルートに基づいて、車両1を目的地まで自律走行させる機能である。
音声出力装置17は、ナビゲーションシステム15が備えるスピーカ、オーディオ装置のスピーカ、ブザー等の聴覚的情報を出力する装置である。音声出力装置17は、コントローラ20の制御に従って、各種の提示情報を乗員に報知する。
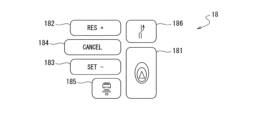
図2は、本実施形態の入力装置18の一部を示す図である。入力装置18は、例えばハンドルのスポーク部などに配置されたボタンスイッチ群であってよい。入力装置18は、コントローラ20が備える自律走行制御機能のオン/オフ等を設定する際に使用する。入力装置18は、メインスイッチ181と、リジューム・アクセラレートスイッチ182と、セット・コーストスイッチ183と、キャンセルスイッチ184と、車間調整スイッチ185と、車線変更支援スイッチ186とを備える。
なお、図2に示すボタンスイッチ群以外にも、方向指示器の方向指示レバーやその他の車載機器14のスイッチを入力装置18として用いることができる。例えば、コントローラ20から自動で車線変更を行うか否かを提案された場合に、乗員が方向指示レバーを操作すると、提案された車線変更ではなく、方向指示レバーが操作された方向に向かって車線変更を行う。
また車両挙動制御装置19は、自律走行制御機能により、後述するレーンキープ制御、車線変更支援機能、追い越し支援機能又はルート走行支援機能を実行する場合に、駆動機構とブレーキの動作制御に加えて、ステアリングアクチュエータの動作を制御することで、車両1の操舵制御を実行する。
以下に説明するコントローラ20の機能は、例えばプロセッサ21が、記憶装置22に格納されたコンピュータプログラムを実行することにより実現される。
なお、コントローラ20を、以下に説明する各情報処理を実行するための専用のハードウエアにより形成してもよい。例えば、コントローラ20は、汎用の半導体集積回路中に設定される機能的な論理回路を備えてもよい。例えばコントローラ20はフィールド・プログラマブル・ゲート・アレイ(FPGA:Field-Programmable Gate Array)等のプログラマブル・ロジック・デバイス(PLD:Programmable Logic Device)等を有していてもよい。
自律速度制御機能は、先行車両を検出しているときは、車両1が走行中の道路の制限速度、又は乗員が設定した車速を上限にして、車速に応じた車間距離を保つように車間制御を行いつつ先行車両に追従走行する機能である。
一方、先行車両を検出していない場合には、自律速度制御機能は、車両1が走行中の道路の制限速度、又は乗員が設定した車速で定速走行を行う。前者を車間制御、後者を定速制御ともいう。
コントローラ20は、センサ11により道路標識から走行中の道路の制限速度を認識し、あるいは地図データベース13の地図情報から制限速度を認識して、その制限速度を自動的に設定車速にする機能を含んでもよい。制限速度の認識方法については後述する。
車間制御は、センサ11の前方レーダ等により、自車線の前方に先行車両が存在することが検出された場合に実行される。車間制御では、設定された走行速度を上限にして、設定された車間距離を維持するように、前方レーダにより検出した車間距離データをフィードバックしながら、車両挙動制御装置19によりエンジンやブレーキなどの駆動機構の動作を制御する。
自律操舵制御機能は、ステアリングアクチュエータの動作を制御することで、車両1の操舵制御を実行する機能である。
自律操舵制御機能は、例えば、レーンキープ機能、車線変更支援機能、追い越し支援機能、及びルート走行支援機能などを含む。
レーンキープ機能とは、例えば車線の中央付近を走行するようにステアリングアクチュエータを制御して、乗員のハンドル操作を支援する機能である。
または、メインスイッチ181により自律走行制御機能をオンした後に、自律走行制御開始条件が成立すると、コントローラ20は、セット・コーストスイッチ183が押下されるのを待つ。セット・コーストスイッチ183が押下されると、コントローラ20は、自律走行制御を開始して自律操舵制御機能のレーンキープ機能を実行する。
車線変更支援機能は、乗員が方向指示レバーを操作すると方向指示器を点灯し、所定の車線変更開始条件を満たした場合に、自動車線変更の一連の処理である車線変更操作を開始する。車線変更支援機能は、走行情報取得機能により取得した各種の走行情報に基づいて、所定の車線変更開始条件が成立したか否かを判断する。
車線変更支援機能は、車線変更開始条件を満たした場合に車線変更操作を開始する。車線変更操作では、車両1を隣接車線へ横移動させ、隣接車線への移動が完了すると方向指示器を消灯し、隣接車線でのレーンキープ機能の実行を開始する。
追い越し支援機能は、自車線の前方に車両1よりも遅い先行車両が存在し、かつ、所定の追い越し提案条件を満たした場合に、追い越し情報を表示装置16により乗員に提示する。ここで、追い越し情報とは、先行車両の追い越しを行なうことを乗員に提案するための情報である。追い越し支援機能は、追い越し情報の提示に対し、乗員が入力装置18の車線変更支援スイッチ186を操作して承諾し、かつ、予め設定された追い越し開始条件を満たした場合に、方向指示器を点灯して上述した車線変更操作を開始する。追い越し支援機能は、走行情報取得機能により取得した各種走行情報に基づいて、追い越し提案条件及び追い越し開始条件が成立したか否かを判断する。
ルート走行支援機能は、設定されたルートに分岐地点や合流地点、出口や料金所等の走行方向変更地点が存在し、走行方向変更地点までの距離が所定距離以内であり、かつ、所定のルート走行提案条件を満たした場合に、ルート走行情報を表示装置16により提示し、走行方向変更地点への車線変更を提案する。また、ルート走行支援機能は、車線変更の提案が車線変更支援スイッチ186の操作により承諾され、かつ、所定のルート走行開始条件を満たした場合に車線変更操作を開始する。
ルート走行支援機能は、走行情報取得機能により取得した各種走行情報に基づいて、ルート走行提案条件及びルート走行開始条件が成立したか否かを判断する。
上記のとおりコントローラ20は、センサ11により道路標識から走行中の道路の制限速度を認識し、あるいは地図データベース13の地図情報から制限速度を認識して、認識した制限速度を自律速度制御機能の設定車速に用いる。またコントローラ20は、認識した制限速度を、表示装置16に表示する。例えば、メータ部に組み込まれたディスプレイ、フロントガラスに映し出されるヘッドアップディスプレイに表示する。
そして、コントローラ20は、車両1から遠い位置にある速度制限標識を除外した後に、撮像画像から速度制限標識が認識されたか否かを判定する。すなわち、車両1から遠い位置にある速度制限標識以外の制限速度標識が、撮像画像から認識されたか否かを判定する。速度制限標識が撮像画像から認識された場合に、撮像画像から認識された速度制限標識が示す制限速度を車両1が走行する道路の制限速度として認識する。また、速度制限標識が撮像画像から認識されない場合には、三次元高精度地図情報に含まれる制限速度情報に基づいて車両1が走行する道路の制限速度を認識する。例えば、三次元高精度地図情報において車両1が走行する道路に対応付けて記憶された制限速度を、車両1が走行する道路の制限速度として認識してよい。
図3は、第1道路R1及び第2道路R2を含んだ複数の道路が併設されており、車両1が第1道路R1を走行している状況を例示している。例えば、第1道路R1は米国のフリーウェイ(freeway)であり、第2道路R2はエクスプレスウェイ(Expressway)である。第1道路R1の速度制限標識31及び32は比較的低い制限速度(図3の例では時速55マイル)を示し、第2道路R2の速度制限標識33及び34は比較的高い制限速度(図3の例では時速65マイル)を示している。
このように複数の速度制限標識を同時に撮像画像から認識した場合には、車両1が走行している道路の速度制限標識ではない標識を、車両1が走行している道路の速度制限標識として誤認識する恐れがある。
そこで、コントローラ20は、撮像画像から複数の速度制限標識が認識されたか否かを判定し、複数の速度制限標識が認識されたと判定した場合に、認識された複数の速度制限標識が、車両1の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識を含むか否かを判定する。
なお、速度制限標識31及び32は、必ずしも第1道路R1の左右の道路端に位置している標識である必要はない。速度制限標識31及び32は、例えば撮像画像の横方向の中央よりも右側の座標と左側の座標でそれぞれ検出されていればよい。
図3の例では、速度制限標識31及び32が示す制限速度である時速55マイルを第1道路R1の制限速度であると認識する。
これにより、複数の道路が併設されている区間において、隣接道路の速度制限標識が示す制限速度を誤って車両1が走行する道路の制限速度であると認識することを抑制できる。
図4の例は、複数の速度制限標識35及び36が互いに近接して設置されて一群の速度制限標識を形成している。このように複数の速度制限標識が互いに近接して設置されている場合、これら複数の速度制限標識は、例えば特定種類の車両の制限速度を示す速度制限標識と、それ以外の種類の車両の制限速度を示す速度制限標識と、を含むことがある。また、最高速度を示す速度制限標識と、最低速度を示す速度制限標識と、を含むことがある。図4の例では、トラックの制限速度(図4の例では時速40マイル)を示す速度制限標識36と、トラック以外の制限速度を示す速度制限標識35(図4の例では時速55マイル)とが互いに近接して設置されている。
この場合には、車両1とは異なる特定種類の車両の制限速度を示す速度制限標識36が示す速度を、車両1の制限速度として認識する恐れがある。または、最低速度を示す速度制限標識が示す速度を、車両1の最高速度の制限速度として認識する恐れがある。
認識した複数の速度制限標識が、互いに近接する一群の速度制限標識を含むと判定した場合、コントローラ20は、互いに近接する一群の速度制限標識が示す速度のうち、最も高い速度を車両1が走行する道路の制限速度であると認識する。
図4の例では、速度制限標識35が示す速度(時速55マイル)と速度制限標識36が示す速度(時速40マイル)のうち最も高い時速55マイルを、車両1が走行する道路の制限速度であると認識する。
これにより、複数の速度制限標識が互いに近接して設置されている場合において、車両1と異なる特定種類の車両の制限速度を車両1の制限速度として誤って認識するのを回避できる。また、最低速度を示す速度制限標識が示す速度を、車両1の最高速度の制限速度として誤って認識するのを回避できる。
例えばコントローラ20は、認識した複数の速度制限標識を順次選択し、選択した速度制限標識を基準として、基準とする速度制限標識から左右方向、前後方向及び上下方向の所定距離以内にある全ての速度制限標識を、互いに近接する一群の速度制限標識として抽出してよい。
所定方向にある速度制限標識が複数ある場合には、最も近い速度制限標識が示す制限速度を車両1が走行する道路の制限速度であると認識する。
あるいは、コントローラ20は、複数の速度制限標識のうち最も近い速度制限標識が示す制限速度を車両1が走行する道路の制限速度であると認識してもよい。
なお、上記説明においてコントローラ20は、車両1の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識を含むか否かを判定し、車両1の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識と含まない場合には、認識した複数の速度制限標識が、互いに近接する一群の速度制限標識を含むか否かを判定したが、本発明は判定順序を限定しない。例えば、認識した複数の速度制限標識が、互いに近接する一群の速度制限標識を含まない場合に、車両1の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識を含むか否かを判定してもよく、車両1の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識を含むか否かと、認識した複数の速度制限標識が互いに近接する一群の速度制限標識を含むか否か、を総合的に判断して制限速度を認識してもよい。
図5は、実施形態の制限速度認識方法の一例のフローチャートである。
ステップS1においてコントローラ20は、センサ11の前方カメラから車両1の前方の環境を表す撮像画像を取得する。
ステップS2においてコントローラ20は、取得した撮像画像から速度制限標識を認識する。
ステップS3においてコントローラ20は、車両1から遠い位置にある速度制限標識を、速度制限標識の認識結果から除外する。
ステップS5においてコントローラ20は、三次元高精度地図情報に含まれる制限速度情報に基づいて車両1が走行する道路の制限速度を認識する。その後に処理は終了する。
ステップS7においてコントローラ20は、認識された単一の速度制限標識が示す制限速度を車両1が走行する道路の制限速度として認識する。その後に処理は終了する。
ステップS9においてコントローラ20は、車両1の右前方と左前方にそれぞれ存在する速度制限標識が示す制限速度を、車両1が走行する道路の制限速度であると認識する。その後に処理は終了する。
ステップS11においてコントローラ20は、互いに近接する一群の速度制限標識が示す速度のうち、最も高い速度を車両1が走行する道路の制限速度であると認識する。その後に処理は終了する。
ステップS12においてコントローラ20は、車両1の右前方と左前方のうち予め定めたいずれか一方の方向である所定方向にある速度制限標識が示す制限速度を車両1が走行する道路の制限速度であると認識する。その後に処理は終了する。
(1)コントローラ20は、車両1の前方の環境を表す撮像画像をカメラから取得し、撮像画像から速度制限標識を認識し、撮像画像から複数の速度制限標識が認識されたか否かを判定し、複数の速度制限標識が認識されたと判定した場合に、認識した複数の速度制限標識が、車両1の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識を含むか否かを判定し、認識した複数の速度制限標識が、車両1の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識を含むと判定した場合に、車両1の右前方と左前方にそれぞれ存在する速度制限標識が示す制限速度を、車両1が走行する道路の制限速度であると認識する。
これにより、複数の道路が併設されている区間において、隣接道路の速度制限標識が示す制限速度を誤って車両1が走行する道路の制限速度であると認識することを抑制できる。
これにより、複数の速度制限標識が互いに近接して設置されている場合において、車両1と異なる特定種類の車両の制限速度を車両1の制限速度として誤って認識するのを回避できる。また、最低速度を示す速度制限標識が示す速度を、車両1の最高速度の制限速度として誤って認識するのを回避できる。
これにより、認識した複数の速度制限標識が、互いに近接する一群の速度制限標識を含むか否かを判定できる。
Claims (7)
- 自車両の前方の環境を表す撮像画像をカメラから取得する処理と、
前記カメラから取得した撮像画像から速度制限標識を認識する処理と、
前記カメラから取得した撮像画像から複数の速度制限標識が認識されたか否かを判定する処理と、
前記複数の速度制限標識が認識されたと判定した場合に、前記複数の速度制限標識が、前記カメラから取得した撮像画像の横方向の中央よりも右側の座標と前記カメラから取得した撮像画像の横方向の中央よりも左側の座標とでそれぞれ検出された同じ制限速度を示す速度制限標識を含むか否かを判定する処理と、
前記複数の速度制限標識が、前記自車両の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識を含むと判定した場合に、前記自車両の右前方と左前方にそれぞれ存在する前記速度制限標識が示す制限速度を、前記自車両が走行する道路の制限速度であると認識する処理と、
前記複数の速度制限標識が、前記自車両の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識と含まないと判定した場合に、前記複数の速度制限標識が、互いに近接する一群の速度制限標識を含むか否かを判定する処理と、
前記複数の速度制限標識が、互いに近接する一群の速度制限標識を含むと判定した場合に、前記一群の速度制限標識がそれぞれ示す速度のうち最も高い速度を、前記自車両が走行する道路の制限速度であると認識する処理と、をコントローラに実行させ、
前記自車両は、制限速度の異なる複数の種類の車両のうち比較的低い制限速度が適用される特定種類以外の車両であることを特徴とする制限速度認識方法。 - 前記複数の速度制限標識のいずれかの速度制限標識を選択する処理と、
前記複数の速度制限標識の他の速度制限標識が、前記いずれかの速度制限標識から所定距離の範囲内に存在するか否かを判定する処理と、
前記他の速度制限標識が前記いずれかの速度制限標識から所定距離の範囲内に存在すると判定した場合に、前記いずれかの速度制限標識と前記他の速度制限標識とを、互いに近接する前記一群の速度制限標識に含まれる速度制限標識として抽出する処理と、
を前記コントローラに実行させることを特徴とする請求項1に記載の制限速度認識方法。 - 自車両の前方の環境を撮影するカメラと、
前記カメラから取得した撮像画像から速度制限標識を認識する処理と、前記カメラから取得した撮像画像から複数の速度制限標識が認識されたか否かを判定する処理と、前記複数の速度制限標識が認識されたと判定した場合に、前記複数の速度制限標識が、前記カメラから取得した撮像画像の横方向の中央よりも右側の座標と前記カメラから取得した撮像画像の横方向の中央よりも左側の座標とでそれぞれ検出された同じ制限速度を示す速度制限標識を含むか否かを判定する処理と、前記複数の速度制限標識が、前記自車両の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識を含むと判定した場合に、前記自車両の右前方と左前方にそれぞれ存在する前記速度制限標識が示す制限速度を、前記自車両が走行する道路の制限速度であると認識する処理と、前記複数の速度制限標識が、前記自車両の右前方と左前方にそれぞれ存在する同じ制限速度を示す速度制限標識と含まないと判定した場合に、前記複数の速度制限標識が、互いに近接する一群の速度制限標識を含むか否かを判定する処理と、前記複数の速度制限標識が、互いに近接する一群の速度制限標識を含むと判定した場合に、前記一群の速度制限標識がそれぞれ示す速度のうち最も高い速度を、前記自車両が走行する道路の制限速度であると認識する処理と、を実行するコントローラと、を備え、
前記自車両は、制限速度の異なる複数の種類の車両のうち比較的低い制限速度が適用される特定種類以外の車両であることを特徴とする制限速度認識装置。 - 前記複数の速度制限標識が、前記自車両の右前方且つ前記自車両が走行する道路の右側の道路端と前記自車両の左前方且つ前記自車両が走行する道路の左側の道路端にそれぞれ存在する同じ制限速度を示す速度制限標識を含むか否かを判定する処理を、前記コントローラに実行させることを特徴とする請求項1又は2に記載の制限速度認識方法。
- 前記コントローラは、前記複数の速度制限標識が、前記自車両の右前方且つ前記自車両が走行する道路の右側の道路端と前記自車両の左前方且つ前記自車両が走行する道路の左側の道路端にそれぞれ存在する同じ制限速度を示す速度制限標識を含むか否かを判定する処理を実行する、ことを特徴とする請求項3に記載の制限速度認識装置。
- 前記複数の速度制限標識が、互いに近接する一群の速度制限標識を含まない場合、前記自車両の右前方と左前方のうち予め定めたいずれか一方の方向である所定方向にある複数の速度制限標識のうち、前記自車両に最も近い速度制限標識が示す制限速度を前記自車両が走行する道路の制限速度であると認識する処理を、前記コントローラに実行させることを特徴とする請求項1、2又は4に記載の制限速度認識方法。
- 前記コントローラは、前記複数の速度制限標識が、互いに近接する一群の速度制限標識を含まない場合、前記自車両の右前方と左前方のうち予め定めたいずれか一方の方向である所定方向にある複数の速度制限標識のうち、前記自車両に最も近い速度制限標識が示す制限速度を前記自車両が走行する道路の制限速度であると認識する処理を、実行する、ことを特徴とする請求項3又は5に記載の制限速度認識装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/020482 WO2022249468A1 (ja) | 2021-05-28 | 2021-05-28 | 制限速度認識方法及び制限速度認識装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022249468A1 JPWO2022249468A1 (ja) | 2022-12-01 |
| JPWO2022249468A5 JPWO2022249468A5 (ja) | 2024-03-22 |
| JP7622832B2 true JP7622832B2 (ja) | 2025-01-28 |
Family
ID=84229637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023523925A Active JP7622832B2 (ja) | 2021-05-28 | 2021-05-28 | 制限速度認識方法及び制限速度認識装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240221387A1 (ja) |
| EP (1) | EP4349677B1 (ja) |
| JP (1) | JP7622832B2 (ja) |
| CN (1) | CN117396386A (ja) |
| WO (1) | WO2022249468A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116238497B (zh) * | 2023-05-11 | 2024-01-26 | 安徽蔚来智驾科技有限公司 | 车辆限速控制方法、电子设备、存储介质及车辆 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009120111A (ja) | 2007-11-16 | 2009-06-04 | Toyota Motor Corp | 車両用制御装置 |
| JP2016224718A (ja) | 2015-05-29 | 2016-12-28 | 株式会社デンソー | 運転支援装置及び運転支援方法 |
| JP2019059361A (ja) | 2017-09-27 | 2019-04-18 | マツダ株式会社 | 車両制御装置 |
| JP2019212189A (ja) | 2018-06-08 | 2019-12-12 | スズキ株式会社 | 車両用運転支援装置 |
| JP2021014239A (ja) | 2019-07-16 | 2021-02-12 | 本田技研工業株式会社 | 車両制御装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150121977A (ko) * | 2014-04-22 | 2015-10-30 | 주식회사 만도 | 교통표지판 인식장치 및 그의 제한속도 출력방법 |
| US9937923B2 (en) * | 2016-01-30 | 2018-04-10 | Bendix Commercial Vehicle Systems Llc | System and method for providing a speed warning and speed control |
-
2021
- 2021-05-28 WO PCT/JP2021/020482 patent/WO2022249468A1/ja not_active Ceased
- 2021-05-28 CN CN202180098544.4A patent/CN117396386A/zh active Pending
- 2021-05-28 EP EP21942151.8A patent/EP4349677B1/en active Active
- 2021-05-28 US US18/563,216 patent/US20240221387A1/en active Pending
- 2021-05-28 JP JP2023523925A patent/JP7622832B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009120111A (ja) | 2007-11-16 | 2009-06-04 | Toyota Motor Corp | 車両用制御装置 |
| JP2016224718A (ja) | 2015-05-29 | 2016-12-28 | 株式会社デンソー | 運転支援装置及び運転支援方法 |
| JP2019059361A (ja) | 2017-09-27 | 2019-04-18 | マツダ株式会社 | 車両制御装置 |
| JP2019212189A (ja) | 2018-06-08 | 2019-12-12 | スズキ株式会社 | 車両用運転支援装置 |
| JP2021014239A (ja) | 2019-07-16 | 2021-02-12 | 本田技研工業株式会社 | 車両制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4349677A4 (en) | 2024-08-14 |
| WO2022249468A1 (ja) | 2022-12-01 |
| EP4349677B1 (en) | 2026-01-07 |
| CN117396386A (zh) | 2024-01-12 |
| JPWO2022249468A1 (ja) | 2022-12-01 |
| US20240221387A1 (en) | 2024-07-04 |
| EP4349677A1 (en) | 2024-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20190071075A1 (en) | Vehicle control system, vehicle control method, and vehicle control program | |
| CN106541946A (zh) | 车速控制装置 | |
| JP7790256B2 (ja) | 標識認識方法、標識認識装置、運転支援方法及び運転支援装置 | |
| JP7613575B2 (ja) | 運転支援方法及び運転支援装置 | |
| JP7548426B2 (ja) | 画像制御方法及び画像制御装置 | |
| US20200385023A1 (en) | Vehicle control apparatus, vehicle, operation method of vehicle control apparatus, and non-transitory computer-readable storage medium | |
| JP7622832B2 (ja) | 制限速度認識方法及び制限速度認識装置 | |
| US12097858B2 (en) | Travel control method and travel control device for vehicle | |
| US20240399866A1 (en) | Display apparatus for vehicle, display method, and display program | |
| JP7662048B2 (ja) | 車両制御方法及び車両制御装置 | |
| JP7658175B2 (ja) | 運転支援方法及び運転支援装置 | |
| US12319291B2 (en) | Driving assistance method and driving assistance device for performing a lane change | |
| JP7613574B2 (ja) | 運転支援方法及び運転支援装置 | |
| JP7622900B2 (ja) | 運転支援方法及び運転支援装置 | |
| US20200384991A1 (en) | Vehicle control apparatus, vehicle, operation method of vehicle control apparatus, and non-transitory computer-readable storage medium | |
| JP2022079948A (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP2021142906A (ja) | 車両追従走行システム、車両制御装置、車両、および制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231108 |
|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A5211 Effective date: 20231108 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240806 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241217 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241230 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7622832 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |