JP7658100B2 - 道路情報収集システム、道路情報収集方法、および道路情報収集プログラム - Google Patents
道路情報収集システム、道路情報収集方法、および道路情報収集プログラム Download PDFInfo
- Publication number
- JP7658100B2 JP7658100B2 JP2021018913A JP2021018913A JP7658100B2 JP 7658100 B2 JP7658100 B2 JP 7658100B2 JP 2021018913 A JP2021018913 A JP 2021018913A JP 2021018913 A JP2021018913 A JP 2021018913A JP 7658100 B2 JP7658100 B2 JP 7658100B2
- Authority
- JP
- Japan
- Prior art keywords
- detection device
- target area
- feature extraction
- identified
- road information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Traffic Control Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
まず、図1を用いて、本発明が適用される一例について説明する。図1は、本発明の第1の実施形態に係る道路情報収集システムの概要図である。道路情報収集システム10は、第1検知装置100Aと第2検知装置100Bを備える。第1検知装置100Aは、第1センサ101A、通信装置102Aを備える。第2検知装置100Bは、第2センサ101B、通信装置102Bを備える。
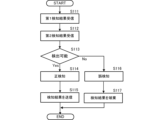
図1は本発明の第1の実施形態に係る道路情報収集システムの概要図である。図2は本発明の第1の実施形態に係る道路情報収集システムの概要図(正面図)である。図3(A)、図3(B)、図3(C)は、本発明の第1の実施形態に係る道路情報収集システムの物体から反射した情報を示す図である。図4は本発明の第1の実施形態に係る道路情報収集システムのブロック図である。図5は本発明の第1の実施形態に係る道路情報収集システムのフローチャートである。図6は本発明の第1の実施形態に係る道路情報収集システムのフローチャートである。
まず、第1センサ101Aと第2センサ101Bから検知結果を受信し、正検知と判断する場合について説明する。第1センサ101Aは、受信した反射波を第1検知結果として通信装置102Aに出力する。通信装置102Aは、第1検知結果を第1特徴抽出部150Aに送信する。第2センサ101Bは、受信した反射波を第2検知結果として通信装置102Bに出力する。通信装置102Bは、第2検知結果を第2特徴抽出部150Bに送信する。なお、第1センサ101A、第2センサ101Bは、対象領域400における検知を繰り返し行う。
次に、第1センサ101Aと第2センサ101Bの一方から検知結果を受信し、誤検知と判断する場合について説明する。
第1センサ101Aは、自動車300にミリ波を照射し、反射波を受信する(S101)。第1センサ101Aは、第1検知結果を通信装置102Aに出力する。通信装置102Aは、第1検知結果を第1特徴抽出部150Aに送信する(S102)。
第2センサ101Bは、歩行者200、自動車300にミリ波を照射し、反射波を受信する(S101)。第2センサ101Bは、第2検知結果を通信装置102Bに出力する。通信装置102Bは、第2検知結果を第2特徴抽出部150Bに送信する(S102)。
(正検知の場合)
統合処理部160は、第1特徴抽出部150Aから第1検知結果を受信する(S111)。また、統合処理部160は、第2特徴抽出部150Bから第2検知結果を受信する(S112)。
統合処理部160は、第1特徴抽出部150Aから第1検知結果を受信する(S111)。また、統合処理部160は、第2特徴抽出部150Bから第2検知結果を受信する(S112)。このとき、第1検知結果には、検知された結果が含まれていない。
次に、図7を用いて、道路情報収集システムの具体的な構成について説明する。図7は、本発明の第2の実施形態に係る道路情報収集システムのフローチャートである。
(正検知の場合)
統合処理部160は、第1特徴抽出部150Aから第1検知結果を受信する(S211)。また、統合処理部160は、第2特徴抽出部150Bから第2検知結果を受信する(S212)。
統合処理部160は、第1特徴抽出部150Aから第1検知結果を受信する(S211)。また、統合処理部160は、第2特徴抽出部150Bから第2検知結果を受信する(S212)。このとき、第1検知結果には、検知された結果が含まれていない。
<付記>
道路(20)上の対象領域(400)の近傍に設置され、電波を照射することで前記対象領域(400)に位置する物体(200,300)を検知する複数のセンサ(100A,100B)と、
前記電波の照射方向において、前記複数のセンサ(100A,100B)の少なくとも1つが前記物体(200,300)を検知できなかった場合に誤検知として判定する統合処理部(160)と、
を備える、道路情報収集システム(10)。
P2…受信強度
10…道路情報収集システム
20…道路
21,22…側端
100A…第1検知装置
100B…第2検知装置
101A…第1センサ
101B…第2センサ
102A…通信装置
102B…通信装置
105A…照射領域
105B…照射領域
150A…第1特徴抽出部
150B…第2特徴抽出部
160…統合処理部
170…送信部
200…歩行者
300…自動車
400…対象領域
500A,500B…点群
Claims (9)
- 道路上の対象領域の近傍に設置され、この対象領域に照射した電波の反射波を受信するセンサを有する第1検知装置および第2検知装置と、
前記第1検知装置が前記対象領域に照射して受信した電波の反射波を基に、前記対象領域内に位置する物体の特徴を特定するとともに、前記第2検知装置が前記対象領域に照射して受信した電波の反射波を基に、前記対象領域内に位置する物体の特徴を特定する特徴抽出部と、
前記特徴抽出部が、前記第1検知装置に対して特徴を特定した物体が1つもなく、且つ前記第2検知装置に対して特徴を特定した物体が1つ以上あった場合、前記対象領域内に位置する物体が誤検知されていると判断する統合処理部と、
を備え、
前記第1検知装置と前記第2検知装置とは、前記対象領域に対する電波の照射方向が異なり、
前記統合処理部は、前記特徴抽出部が前記第1検知装置に対して特徴を特定した物体の数が、前記特徴抽出部が前記第2検知装置に対して特徴を特定した物体の数よりも少なかった場合、前記特徴抽出部が前記第2検知装置に対して特徴を特定した物体であって、前記特徴抽出部が前記第1検知装置に対して特徴を特定していない物体が、前記第1検知装置側から視たとき、前記特徴抽出部が前記第1検知装置に対して特徴を特定した別の物体に隠れている物体であれば、前記対象領域内に位置する物体が誤検知されていないと判断する、
道路情報収集システム。 - 前記第1検知装置と前記第2検知装置とは、前記対象領域を挟んで対向させて設置している請求項1に記載の道路情報収集システム。
- 前記特徴抽出部は、物体の特徴として、前記対象領域内における物体の位置、移動速度を特定する、
請求項1または請求項2に記載の道路情報収集システム。 - 前記特徴抽出部は、前記物体の移動速度によって前記物体の種類を判定する、請求項3に記載の道路情報収集システム。
- 前記統合処理部は、前記対象領域内に位置する物体が誤検知されていないと判断した検知結果を送信部に上位システムへ送信させ、前記対象領域内に位置する物体が誤検知されていると判断した検知結果を前記送信部に上位システムへ送信させることなく破棄する、請求項1乃至請求項4のいずれかに記載の道路情報収集システム。
- 前記統合処理部は、前記対象領域内に位置する物体が誤検知されていると判断した回数をカウントし、この回数が閾値を超えた場合に警告を出力する、請求項1乃至請求項5のいずれかに記載の道路情報収集システム。
- 前記センサは電波レーダである、請求項1乃至請求項6のいずれかに記載の道路情報収集システム。
- 道路上の対象領域の近傍に設置され、この対象領域に照射した電波の反射波を受信するセンサを有する第1検知装置および第2検知装置が接続される情報処理装置のコンピュータが、
前記第1検知装置が前記対象領域に照射して受信した電波の反射波を基に、前記対象領域内に位置する物体の特徴を特定するとともに、前記第2検知装置が前記対象領域に照射して受信した電波の反射波を基に、前記対象領域内に位置する物体の特徴を特定する特徴抽出ステップと、
前記特徴抽出ステップで、前記第1検知装置に対して特徴を特定した物体が1つもなく、且つ前記第2検知装置に対して特徴を特定した物体が1つ以上あった場合、前記対象領域内に位置する物体が誤検知されていると判断する統合処理ステップと、
を実行し、
前記第1検知装置と前記第2検知装置とは、前記対象領域に対する電波の照射方向が異なり、
前記統合処理ステップは、前記特徴抽出ステップで第1検知装置に対して特徴を特定した物体の数が、前記特徴抽出ステップで前記第2検知装置に対して特徴を特定した物体の数よりも少なかった場合、前記特徴抽出ステップで前記第2検知装置に対して特徴を特定した物体であって、前記特徴抽出ステップで前記第1検知装置に対して特徴を特定していない物体が、前記第1検知装置側から視たとき、前記特徴抽出ステップで前記第1検知装置に対して特徴を特定した別の物体に隠れている物体であれば、前記対象領域内に位置する物体が誤検知されていないと判断するステップである、
道路情報収集方法。 - 道路上の対象領域の近傍に設置され、この対象領域に照射した電波の反射波を受信するセンサを有する第1検知装置および第2検知装置が接続される情報処理装置のコンピュータに、
前記第1検知装置が前記対象領域に照射して受信した電波の反射波を基に、前記対象領域内に位置する物体の特徴を特定するとともに、前記第2検知装置が前記対象領域に照射して受信した電波の反射波を基に、前記対象領域内に位置する物体の特徴を特定する特徴抽出ステップと、
前記特徴抽出ステップで、前記第1検知装置に対して特徴を特定した物体が1つもなく、且つ前記第2検知装置に対して特徴を特定した物体が1つ以上あった場合、前記対象領域内に位置する物体が誤検知されていると判断する統合処理ステップと、
を実行させ、
前記第1検知装置と前記第2検知装置とは、前記対象領域に対する電波の照射方向が異なり、
前記統合処理ステップは、前記特徴抽出ステップで第1検知装置に対して特徴を特定した物体の数が、前記特徴抽出ステップで前記第2検知装置に対して特徴を特定した物体の数よりも少なかった場合、前記特徴抽出ステップで前記第2検知装置に対して特徴を特定した物体であって、前記特徴抽出ステップで前記第1検知装置に対して特徴を特定していない物体が、前記第1検知装置側から視たとき、前記特徴抽出ステップで前記第1検知装置に対して特徴を特定した別の物体に隠れている物体であれば、前記対象領域内に位置する物体が誤検知されていないと判断するステップである、
道路情報収集プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021018913A JP7658100B2 (ja) | 2021-02-09 | 2021-02-09 | 道路情報収集システム、道路情報収集方法、および道路情報収集プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021018913A JP7658100B2 (ja) | 2021-02-09 | 2021-02-09 | 道路情報収集システム、道路情報収集方法、および道路情報収集プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022121921A JP2022121921A (ja) | 2022-08-22 |
| JP7658100B2 true JP7658100B2 (ja) | 2025-04-08 |
Family
ID=82933082
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021018913A Active JP7658100B2 (ja) | 2021-02-09 | 2021-02-09 | 道路情報収集システム、道路情報収集方法、および道路情報収集プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7658100B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015118804A1 (ja) | 2014-02-05 | 2015-08-13 | パナソニックIpマネジメント株式会社 | 物体検知装置 |
| JP2016183953A (ja) | 2015-03-25 | 2016-10-20 | パナソニック株式会社 | 物体検出装置および物体検出方法 |
| JP2018144505A (ja) | 2017-03-01 | 2018-09-20 | 株式会社日立製作所 | 存在検知システムおよび存在検知装置 |
| JP2020079722A (ja) | 2018-11-12 | 2020-05-28 | 住友電気工業株式会社 | 移動体センサ、異常判定方法およびコンピュータプログラム |
-
2021
- 2021-02-09 JP JP2021018913A patent/JP7658100B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015118804A1 (ja) | 2014-02-05 | 2015-08-13 | パナソニックIpマネジメント株式会社 | 物体検知装置 |
| JP2016183953A (ja) | 2015-03-25 | 2016-10-20 | パナソニック株式会社 | 物体検出装置および物体検出方法 |
| JP2018144505A (ja) | 2017-03-01 | 2018-09-20 | 株式会社日立製作所 | 存在検知システムおよび存在検知装置 |
| JP2020079722A (ja) | 2018-11-12 | 2020-05-28 | 住友電気工業株式会社 | 移動体センサ、異常判定方法およびコンピュータプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022121921A (ja) | 2022-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107408345B (zh) | 物标存在判定方法以及装置 | |
| KR102013224B1 (ko) | 긴급 제동 시스템 및 그 제어방법 | |
| US6680689B1 (en) | Method for determining object classification from side-looking sensor data | |
| EP2810094B1 (en) | Peripheral object detection apparatus and peripheral object detection method | |
| US6542111B1 (en) | Path prediction for vehicular collision warning system | |
| US6838981B2 (en) | Stopped object filtering for side object detection system | |
| US9785846B2 (en) | Method for quantifying classification confidence of obstructions | |
| US11577721B2 (en) | System and method for detecting a risk of collision between a motor vehicle and a secondary object located in the traffic lanes adjacent to said vehicle when changing lanes | |
| EP2023158A2 (en) | Automotive forward looking sensor with identification of traversable stationary obstacles in the driving path | |
| CN111341148B (zh) | 用于处理多重反射信号的机动车的控制系统以及控制方法 | |
| CN102124370A (zh) | 识别延伸的静态对象的方法 | |
| CN102565783A (zh) | 用于使车辆的传感器运行的方法和具有传感器的车辆 | |
| CN104678403A (zh) | 激光雷达传感器系统 | |
| KR20180002762A (ko) | 자동차의 측방 주변 영역 내의 종방향 연장 정지 물체를 분류하는 방법, 운전자 보조 시스템 및 자동차 | |
| CN114556146B (zh) | 用于将尤其是在机动车环境中的对象分类的方法和设备 | |
| JP3664110B2 (ja) | 物体種別判定装置及び物体種別判定方法 | |
| CN114207469A (zh) | 用于对车辆周围环境中的对象进行分类的方法及驾驶员辅助系统 | |
| US20230366994A1 (en) | Method and device for determining false-positive detections of a lidar sensor | |
| JP7658100B2 (ja) | 道路情報収集システム、道路情報収集方法、および道路情報収集プログラム | |
| KR20150061950A (ko) | 차량용 레이더 및 이의 가드레일 인식 방법 | |
| JP3201128B2 (ja) | 車間距離計測装置およびこれを搭載した車両 | |
| CN109416882B (zh) | 在侧面远离的泊车空位的确定 | |
| JP7624081B2 (ja) | 自車死角監視システム、および、自車死角監視方法 | |
| JP6816163B2 (ja) | 少なくとも1つの物体を捕捉する方法、センサー装置のデバイス、センサー装置及び少なくとも1つのセンサー装置を備えるドライバー支援システム | |
| CN112644482B (zh) | 用于确定行驶通道可通过性的方法、驾驶员辅助系统和车辆 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240521 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240822 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250310 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7658100 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |