JP7660919B2 - ロボット手術システム用の無菌アダプタ、アセンブリ、システムおよび方法 - Google Patents
ロボット手術システム用の無菌アダプタ、アセンブリ、システムおよび方法 Download PDFInfo
- Publication number
- JP7660919B2 JP7660919B2 JP2022548516A JP2022548516A JP7660919B2 JP 7660919 B2 JP7660919 B2 JP 7660919B2 JP 2022548516 A JP2022548516 A JP 2022548516A JP 2022548516 A JP2022548516 A JP 2022548516A JP 7660919 B2 JP7660919 B2 JP 7660919B2
- Authority
- JP
- Japan
- Prior art keywords
- sterile
- membrane
- distal
- surgical instrument
- sterile adapter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/10—Surgical drapes specially adapted for instruments, e.g. microscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0807—Indication means
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Robotics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Description
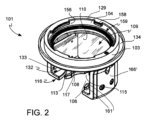
101 無菌アダプタ又はアダプタ
102 ロボット手術システム
103 滅菌アダプタのフレーム
104 無菌アダプタの近位連結装置
105 ロボットマニピュレータシステム、又は電動マニピュレータシステム
106 無菌アダプタの遠位連結装置
107 外科手術用器具
108, 108' 細長い舌
109 無菌アダプタの伸縮性膜
110 膜の近位非滅菌表面
111 膜の遠位滅菌表面
112 局所的な線形変位作用
113、113'細長い舌の端部
114細長い舌の根元部分
115 滅菌アダプタの遠位シート
116側方アクセス開口部
117、117'細長い舌の保持部分又は当接部分
118センタリング要素
119 遠位シートの側部当接壁
120 滅菌アダプタの第2の開口部
121手術器具のシャフト
122 手術器具のエンドエフェクタまたは手首
123 手術用器具のバックエンド(またはバックエンド部分
124 バックエンドの伝達要素(またはロッド
125 手術器具の作動ケーブルまたは腱
126 ロボットマニピュレータシステムのリニアアクチュエータ
127 電動式マニピュレータシステムの回転モータ
128 係合方向
129 滅菌アダプタの環状リム、又は円形リム
130 ロボット手術システムのマスターコンソール
131 手術用器具の対結合部
132 無菌アダプタの遠位キャビティ部
133、133'無菌アダプタの側方案内面
134 無菌アダプタのスカート
135 滅菌アダプタのフラグ装置
136 フラッグ装置の遠位ピン端
137 フラッグ装置の弾性要素
138 フラッグ装置のフラッグピン
139 フラッグ用ピンの当接部分
140 スレーブアセンブリのコネクタ、または環状コネクタ
141 コネクタの遠位対連結装置
142 コネクタの近位接続部分
143 スレーブアセンブリの保護ケース
144 ロボットスレーブアセンブリの無菌ドレープ
145 コネクタの近位フラッグ装置
146 コネクタの当接ピン
147 コネクタの弾性装置
148 滅菌アダプタのフラッギングピンハウジング
149 フラギングピンの傾斜セグメント
150 取外し可能なパネル
151 回転防止装置
152 回転防止システムの半径方向片持ち要素
153 回転防止システムのブロッキングツース
154 コネクタの内部キャビティ
155 ロボットアームリンク
156 環状リムの内側エッジ
158 環状リムの突出部
159 環状リムの外周部
160 回転動作
161 無菌アダプタの当接面
162 手術用器具の対向当接面
163 外科手術用器具の側部対向面
164 遠位弁座の遠位貫通開口部
165 滅菌アダプタのフレームの遠位外面
166、166'無菌アダプタのスペーサ壁
167 バックエンドの伝達要素の近位部分
168 マニピュレータのリニアアクチュエータの遠位部分
169 膜の厚さ
170 モータボックスまたはハウジング
171 シャフトの近位端
172 シャフトの遠位端
173 膜の外縁
174 ロボット手術システムのロールジョイント
175 アーチ型エッジ
176 脱落防止機構
z-z 近位-遠位方向
R-R 放射状方向
Claims (18)
- 複数の線形作動動作(112)及び回転動作(160)を非無菌ロボットマニピュレータシステム(105)から、後端部(123)及び前記後端部(123)から延びるシャフト(121)を有する無菌手術器具(107)へ伝達するために適した、ロボット手術システム(102)のための無菌アダプタ(101)であって、
前記回転動作(160)を前記非無菌ロボットマニピュレータシステム(105)から前記無菌手術器具(107)に伝達するためのフレーム(103)であって、
近位連結装置(104)であって、前記非無菌ロボットマニピュレータシステム(105)と結合するための、近位連結装置(104)と、
遠位連結装置(106)であって、前記無菌手術器具(107)と結合するための遠位連結装置(106)とを有し、
前記フレーム(103)が、前記近位連結装置(104)と前記遠位連結装置(106)との間の貫通開口を画定する、フレーム(103)と、
前記フレーム(103)に固定された膜(109)であって、前記膜(109)の厚さ(169)を通して、前記非無菌ロボットマニピュレータシステム(105)から前記無菌手術器具(107)へ、前記複数の線形作動動作(112)を伝達するための膜(109)と、を備え
前記膜(109)は、実質的に平坦な形状に向かって弾性的に付勢されるように、弾性的に伸縮可能で、
前記膜(109)は、前記膜(109)と前記遠位連結装置(106)との間に遠位キャビティ(132)を形成する前記貫通開口を密封し、
前記遠位キャビティ(132)は、前記無菌手術器具(107)の前記後端部(123)の少なくとも一部を受容するのに適しており、
前記遠位連結装置(106)は、前記膜(109)に面して前記遠位キャビティ(132)を少なくとも部分的に区切る少なくとも1つの当接面(161)を備え、
前記少なくとも1つの当接面(161)は、前記無菌手術器具(107)の一部が前記少なくとも1つの当接面(161)の上に当接するのに適している、無菌アダプタ(101)。 - 前記遠位キャビティ(132)は、前記無菌手術器具(107)の少なくとも1つの側部対向面(163)と嵌合するのに適した側部案内面(133、133')を含み、
前記無菌アダプタ(101)の前記遠位キャビティ(132)の前記側部案内面(133、133')が実質的に平坦である、請求項1に記載の無菌アダプタ(101)。 - 前記遠位キャビティ(132)は、前記無菌手術器具(107)を前記無菌アダプタ(101)に挿入するために設計された側方開口部(116)を含む、請求項1又は2のいずれかに記載の無菌アダプタ(101)。
- 前記遠位キャビティ(132)は、前記無菌手術器具(107)を前記無菌アダプタ(101)の前記遠位キャビティ(132)から押し出す目的で前記遠位キャビティ(132)にアクセスするのに適した第2の側方開口(120)を含む、請求項1から3のいずれかに記載の無菌アダプタ(101)。
- 前記膜(109)が単一の平坦な部品である、請求項1から4のいずれかに記載の無菌アダプタ(101)。
- 前記膜(109)はディスク形状を有する、請求項1から5のいずれかに記載の無菌アダプタ(101)。
- 前記遠位連結装置(106)が、前記遠位キャビティ(132)の外側で遠位に開く遠位貫通開口(164)を有する遠位シート(115)を画定し、
前記遠位貫通開口(164)が、前記膜(109)によってシールされる前記貫通開口と実質的に整列しており、前記膜(109)によってシールされる前記貫通開口と同軸である、請求項1から6のいずれかに記載の無菌アダプタ(101)。 - 前記少なくとも1つの当接面(161)は、前記膜(109)の下にあり、
前記少なくとも一つの当接面(161)は、前記膜(109)に対向し、前記膜(109)の近位遠位方向(z-z)に沿って伸びる前記遠位連結装置(106)の延長部に含まれている、請求項1から7のいずれかに記載の無菌アダプタ(101)。 - 前記膜(109)は、前記フレーム(103)と一体的に取り付けられている、請求項1から8のいずれかに記載の無菌アダプタ(101)。
- ロボット手術システム(102)用のスレーブロボットアセンブリ(100)であって、
非無菌ロボットマニピュレータシステム(105)と、
後端部(123)および前記後端部(123)から延びるシャフト(121)を有する無菌手術器具(107)と、
前記非無菌ロボットマニピュレータシステム(105)から前記無菌手術器具(107)に複数の線形作動動作(112)および回転動作(160)を伝達するのに適した、無菌アダプタ(101)とを備え、
前記無菌アダプタ(101)が、前記非無菌ロボットマニピュレータシステム(105)から前記無菌手術器具(107)へ前記回転動作(160)を伝達するフレーム(103)を含み、
前記フレーム(103)が、前記非無菌ロボットマニピュレータシステム(105)と結合された近位連結装置(104)、および前記無菌手術器具(107)と結合された遠位連結装置(106)を備え、
前記フレーム(103)が、前記近位連結装置(104)と前記遠位連結装置(106)との間の貫通開口を画定し、
前記無菌アダプタ(101)が、前記フレーム(103)に固定された膜(109)を備え、
前記膜(109)は前記膜(109)の厚さ(169)を通して、前記非無菌ロボットマニピュレータシステム(105)から前記無菌手術器具(107)へ前記複数の線形作動動作(112)を伝達し、
前記膜(109)は、実質的に平坦な構成に向かって弾性的に付勢される結果、弾性的に伸縮可能で、
前記膜(109)が、前記膜(109)と前記遠位連結装置(106)との間に遠位キャビティ(132)を形成する前記貫通開口を密閉し、
前記遠位キャビティ(132)が、前記無菌手術器具(107)の前記後端部(123)の少なくとも一部を受容し、
前記遠位連結装置(106)は、前記膜(109)に面して、前記遠位キャビティ(132)を少なくとも部分的に区画する少なくとも1つの当接面(161)を備え、
前記無菌手術器具(107)は、前記少なくとも1つの当接面(161)に当接する、スレーブロボットアセンブリ(100)。 - 前記膜(109)の幾何学的中心が、前記無菌手術器具(107)の前記シャフト(121)と整列している、請求項10に記載のスレーブロボットアセンブリ(100)。
- 前記複数の線形作動動作(112)が、前記膜(109)の近位面(110)に対して直交するように向けられる、請求項10又は11に記載のスレーブロボットアセンブリ(100)。
- 前記膜(109)は単一の膜であり、
前記単一の膜は、前記単一の膜の前記近位面(110)の複数の位置に作用する前記複数の線形作動動作(112)を受ける、請求項12に記載のスレーブロボットアセンブリ(100)。 - 前記非無菌ロボットマニピュレータシステム(105)は、複数のリニアアクチュエータ(126)を備えている、請求項10から13のいずれかに記載のスレーブロボットアセンブリ(100)。
- 前記複数の線形作動動作(112)は、前記無菌手術器具(107)の前記シャフト(121)と整列している、請求項10から14のいずれかに記載のスレーブロボットアセンブリ(100)。
- 前記複数の線形作動動作(112)の前記線形作動動作(112)は、前記無菌手術器具(107)を前記少なくとも1つの当接面(161)に対して荷重をかけるように押す動作を及ぼす、請求項10から15のいずれかに記載のスレーブロボットアセンブリ(100)。
- 前記無菌アダプタ(101)は、前記非無菌ロボットマニピュレータシステム(105)と着脱可能に結合される、請求項10から16までのいずれかに記載のスレーブロボットアセンブリ(100)。
- 前記無菌手術器具(107)は、前記無菌アダプタ(101)と着脱可能に結合される、請求項10から17までのいずれかに記載のスレーブロボットアセンブリ(100)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102020000002536A IT202000002536A1 (it) | 2020-02-10 | 2020-02-10 | Adattatore sterile per un sistema di chirurgia robotica, assieme, sistema e metodo |
| IT102020000002536 | 2020-02-10 | ||
| PCT/IB2021/051073 WO2021161184A1 (en) | 2020-02-10 | 2021-02-10 | Sterile adapter for a robotic surgery system, assembly, system and method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2023513280A JP2023513280A (ja) | 2023-03-30 |
| JP2023513280A5 JP2023513280A5 (ja) | 2024-02-15 |
| JP7660919B2 true JP7660919B2 (ja) | 2025-04-14 |
Family
ID=70738817
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022548516A Active JP7660919B2 (ja) | 2020-02-10 | 2021-02-10 | ロボット手術システム用の無菌アダプタ、アセンブリ、システムおよび方法 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US20230082871A1 (ja) |
| EP (1) | EP4103091B1 (ja) |
| JP (1) | JP7660919B2 (ja) |
| KR (1) | KR20220139965A (ja) |
| CN (1) | CN115175631B (ja) |
| AU (1) | AU2021219057B2 (ja) |
| BR (1) | BR112022015762A2 (ja) |
| ES (1) | ES3048508T3 (ja) |
| IT (1) | IT202000002536A1 (ja) |
| WO (1) | WO2021161184A1 (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021240296A1 (en) * | 2020-05-28 | 2021-12-02 | Mazor Robotics Ltd. | System and method for drape volume control |
| WO2023101971A1 (en) * | 2021-11-30 | 2023-06-08 | Endoquest Robotics, Inc. | Barrier drape adapters for robotic surgical systems |
| JP2024543764A (ja) | 2021-11-30 | 2024-11-26 | エンドクエスト ロボティクス インコーポレイテッド | 患者コンソールの5つの自由度での位置決めシステム |
| KR20260041932A (ko) | 2021-11-30 | 2026-03-27 | 엔도퀘스트 로보틱스 인코포레이티드 | 일회용 엔드 이펙터 |
| TWI835436B (zh) | 2021-11-30 | 2024-03-11 | 美商安督奎斯特機器人公司 | 用於機器人手術系統的可轉向套管組件、其控制組件及其方法 |
| TWI876759B (zh) | 2021-11-30 | 2025-03-11 | 美商安督奎斯特機器人公司 | 機器人手術系統及其控制模組 |
| KR20240152819A (ko) | 2021-11-30 | 2024-10-22 | 엔도퀘스트 로보틱스 인코포레이티드 | 로봇 수술 시스템용 컨트롤러 장치 |
| KR20240152820A (ko) | 2021-11-30 | 2024-10-22 | 엔도퀘스트 로보틱스 인코포레이티드 | 로봇 제어 의료 기기용 힘 전달 시스템 |
| US20250268582A1 (en) * | 2022-04-19 | 2025-08-28 | Wosler Corp. | System, method and device for remote ultrasonography |
| CN115153851B (zh) * | 2022-06-30 | 2025-07-01 | 上海奥朋医疗科技有限公司 | 用于腹腔镜手术机器人器械的快速连接装置及腹腔镜手术机器人 |
| DE102022133861A1 (de) * | 2022-12-19 | 2024-06-20 | Aesculap Ag | Chirurgisch/medizinisches Instrument für einen chirurgischen Roboter und Tragstruktur zur lagernden Aufnahme eines Endeffektors eines chirurgisch/medizinischen Instruments |
| FR3143965A1 (fr) * | 2022-12-23 | 2024-06-28 | Robocath | Cassette pour un module motorisé d’un système robotisé de manipulation d’un dispositif médical tel qu’un cathéter |
| CN118924430B (zh) * | 2023-05-12 | 2025-09-16 | 北京术锐机器人股份有限公司 | 分布式手术机器人系统 |
| CN116763444A (zh) * | 2023-06-19 | 2023-09-19 | 北京万思医疗器械有限公司 | 介入手术机器人及其末端操作机构 |
| DE102024107841B3 (de) * | 2024-03-19 | 2025-07-10 | Karl Storz Se & Co. Kg | Schnittstelle zur Verbindung einer Antriebseinheit mit einem medizinischen Instrument |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013526337A (ja) | 2010-05-14 | 2013-06-24 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 手術システム器具マウンティング |
| US20150173840A1 (en) | 2012-07-03 | 2015-06-25 | Kuka Laboratories Gmbh | Surgical Instrument Arrangement And Drive Train Arrangement For A Surgical Instrument, In Particular A Robot-Guided Surgical Instrument, And Surgical Instrument |
| US20170265951A1 (en) | 2014-05-13 | 2017-09-21 | Covidien Lp | Robotic surgical systems and instrument drive units |
| WO2018159070A1 (ja) | 2017-03-03 | 2018-09-07 | リバーフィールド株式会社 | 動力伝達アダプタおよび医療用マニピュレータシステム |
| WO2018189729A1 (en) | 2017-04-14 | 2018-10-18 | Medical Microinstruments S.p.A. | Robotic microsurgical assembly |
| WO2019006206A1 (en) | 2017-06-29 | 2019-01-03 | Verb Surgical Inc. | STERILE ADAPTER FOR A LINEAR ACTUATED INSTRUMENT DRIVE DEVICE |
| US20190231448A1 (en) | 2018-01-30 | 2019-08-01 | Cmr Surgical Limited | Interfacing a surgical robotic arm and instrument |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5311358A (en) | 1992-10-08 | 1994-05-10 | Time Surgical, Inc. | Universal microscope drape |
| US5682264A (en) | 1993-03-01 | 1997-10-28 | Microtek Medical, Inc. | Universal microscope drape |
| US8206406B2 (en) | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US6024454A (en) | 1998-12-04 | 2000-02-15 | Ph Medical, Inc. | Microscope drape system |
| DE102004054866B3 (de) | 2004-11-12 | 2006-08-03 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Vorrichtung zum Anschließen von konventionellen oder laparoskopischen Instrumenten an einen Roboter |
| US20070064309A1 (en) | 2005-09-21 | 2007-03-22 | Luloh K P | Drape Assembly For Surgical Microscope Assembly |
| US8333755B2 (en) | 2008-03-31 | 2012-12-18 | Intuitive Surgical Operations, Inc. | Coupler to transfer controller motion from a robotic manipulator to an attached instrument |
| US7886743B2 (en) | 2008-03-31 | 2011-02-15 | Intuitive Surgical Operations, Inc. | Sterile drape interface for robotic surgical instrument |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US8602031B2 (en) | 2009-01-12 | 2013-12-10 | Hansen Medical, Inc. | Modular interfaces and drive actuation through barrier |
| WO2015052629A1 (en) * | 2013-10-07 | 2015-04-16 | Srivastava Sudhir Prem | Modular interface for a robotic system |
| WO2016043845A1 (en) | 2014-09-15 | 2016-03-24 | Covidien Lp | Robotically controlling surgical assemblies |
| EP3220847B1 (en) | 2014-11-18 | 2023-09-06 | Covidien LP | Sterile barrier assembly for use in robotic surgical system |
| DE102014117408A1 (de) | 2014-11-27 | 2016-06-02 | avateramedical GmBH | Vorrichtung zur robotergestützten Chirurgie |
| WO2016137611A1 (en) | 2015-02-26 | 2016-09-01 | Covidien Lp | Instrument drive unit including lead screw rails |
| GB2538326B (en) | 2015-05-07 | 2019-06-05 | Cmr Surgical Ltd | A surgical drape for transferring drive |
| US10828115B2 (en) | 2015-07-23 | 2020-11-10 | Sri International | Robotic arm and robotic surgical system |
| US11045273B2 (en) | 2015-09-25 | 2021-06-29 | Covidien Lp | Elastic surgical interface for robotic surgical systems |
| ITUB20154977A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Strumento medicale e metodo di fabbricazione di detto strumento medicale |
| ITUB20155057A1 (it) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Assieme robotico di chirurgia |
| EP3463157A4 (en) | 2016-05-26 | 2020-01-22 | Covidien LP | ROBOTIC SURGICAL ARRANGEMENTS |
| CN114983575A (zh) * | 2016-07-14 | 2022-09-02 | 直观外科手术操作公司 | 包括具有机械封锁的无菌适配器的外科手术设备 |
| CN113349932A (zh) * | 2016-12-20 | 2021-09-07 | 威博外科公司 | 用于机器人外科系统的无菌适配器控制系统和通信接口 |
| IT201700041991A1 (it) | 2017-04-14 | 2018-10-14 | Medical Microinstruments Spa | Assieme robotico per microchirurgia |
| IT201700041980A1 (it) | 2017-04-14 | 2018-10-14 | Medical Microinstruments Spa | Assieme robotico per microchirurgia |
| GB2570518B8 (en) | 2018-01-30 | 2023-05-24 | Cmr Surgical Ltd | Interfacing a surgical robotic arm and instrument |
-
2020
- 2020-02-10 IT IT102020000002536A patent/IT202000002536A1/it unknown
-
2021
- 2021-02-10 EP EP21704957.6A patent/EP4103091B1/en active Active
- 2021-02-10 ES ES21704957T patent/ES3048508T3/es active Active
- 2021-02-10 WO PCT/IB2021/051073 patent/WO2021161184A1/en not_active Ceased
- 2021-02-10 AU AU2021219057A patent/AU2021219057B2/en active Active
- 2021-02-10 KR KR1020227031416A patent/KR20220139965A/ko active Pending
- 2021-02-10 US US17/929,008 patent/US20230082871A1/en active Pending
- 2021-02-10 JP JP2022548516A patent/JP7660919B2/ja active Active
- 2021-02-10 CN CN202180013933.2A patent/CN115175631B/zh active Active
- 2021-02-10 BR BR112022015762A patent/BR112022015762A2/pt unknown
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013526337A (ja) | 2010-05-14 | 2013-06-24 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 手術システム器具マウンティング |
| US20150173840A1 (en) | 2012-07-03 | 2015-06-25 | Kuka Laboratories Gmbh | Surgical Instrument Arrangement And Drive Train Arrangement For A Surgical Instrument, In Particular A Robot-Guided Surgical Instrument, And Surgical Instrument |
| US20170265951A1 (en) | 2014-05-13 | 2017-09-21 | Covidien Lp | Robotic surgical systems and instrument drive units |
| WO2018159070A1 (ja) | 2017-03-03 | 2018-09-07 | リバーフィールド株式会社 | 動力伝達アダプタおよび医療用マニピュレータシステム |
| WO2018189729A1 (en) | 2017-04-14 | 2018-10-18 | Medical Microinstruments S.p.A. | Robotic microsurgical assembly |
| WO2019006206A1 (en) | 2017-06-29 | 2019-01-03 | Verb Surgical Inc. | STERILE ADAPTER FOR A LINEAR ACTUATED INSTRUMENT DRIVE DEVICE |
| US20190231448A1 (en) | 2018-01-30 | 2019-08-01 | Cmr Surgical Limited | Interfacing a surgical robotic arm and instrument |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20220139965A (ko) | 2022-10-17 |
| AU2021219057A1 (en) | 2022-09-08 |
| CN115175631B (zh) | 2026-01-30 |
| JP2023513280A (ja) | 2023-03-30 |
| EP4103091B1 (en) | 2025-07-30 |
| CA3166790A1 (en) | 2021-08-19 |
| IT202000002536A1 (it) | 2021-08-10 |
| EP4103091A1 (en) | 2022-12-21 |
| EP4103091C0 (en) | 2025-07-30 |
| WO2021161184A1 (en) | 2021-08-19 |
| ES3048508T3 (en) | 2025-12-10 |
| CN115175631A (zh) | 2022-10-11 |
| AU2021219057B2 (en) | 2025-12-11 |
| BR112022015762A2 (pt) | 2022-11-22 |
| US20230082871A1 (en) | 2023-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7660919B2 (ja) | ロボット手術システム用の無菌アダプタ、アセンブリ、システムおよび方法 | |
| EP3398528B1 (en) | Surgical loading unit including an articulating end effector | |
| JP2025116176A (ja) | 手首構造 | |
| KR20220051211A (ko) | 전동, 구동 및 무균 어셈블리와 수술 기구 및 시스템, 수술 로봇 | |
| EP3735196A1 (en) | Robotic surgical instrument including high articulation wrist assembly with torque transmission and mechanical manipulation | |
| CN111050684A (zh) | 用于线性致动器械驱动器的无菌适配器 | |
| JP7237923B2 (ja) | 超音波ブレードを有する、回転するエンドエフェクタ組立体を備える外科用装置及びシステム | |
| CN118019625A (zh) | 用于手动激活工具调节的机构 | |
| CN115175633A (zh) | 无菌屏障组件和机器人手术系统 | |
| EP3375387B1 (en) | Adapter with centering mechanism for articulation joint | |
| CN111012385A (zh) | 一种手术器械传动机构 | |
| CN117999152A (zh) | 关节锁定机构 | |
| CN223196150U (zh) | 手术机器人 | |
| US20250352235A1 (en) | Ultrasonic robotically driven surgical instrument | |
| CA3166790C (en) | Sterile adapter for a robotic surgery system, assembly, system and method | |
| CN117338443A (zh) | 医疗器械盒、机器人超声刀及手术机器人 | |
| EP4681655A1 (en) | Surgical tool and surgical robot system | |
| CN118750182B (zh) | 手术机器人及医疗器械盒与动力盒的动力接合方法 | |
| CN222110167U (zh) | 医疗器械盒、机器人超声刀及手术机器人 | |
| JP2022535354A (ja) | 外科用ステープラのためのノズル流体流入防止機構 | |
| CN222110166U (zh) | 医疗器械盒、机器人超声刀及手术机器人 | |
| CN114483808B (zh) | 连接适配器、机械臂组件和手术机器人系统 | |
| CN118677162A (zh) | 集成式驱动装置及手术机器人系统 | |
| CN121926529A (zh) | 手术装置及手术机器人系统 | |
| CN120189239A (zh) | 隔离板及手术机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240206 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250326 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7660919 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |