JP7679552B2 - Automatic travel device, escalator, and method for riding an escalator on an automatic travel device - Google Patents
Automatic travel device, escalator, and method for riding an escalator on an automatic travel device Download PDFInfo
- Publication number
- JP7679552B2 JP7679552B2 JP2024522736A JP2024522736A JP7679552B2 JP 7679552 B2 JP7679552 B2 JP 7679552B2 JP 2024522736 A JP2024522736 A JP 2024522736A JP 2024522736 A JP2024522736 A JP 2024522736A JP 7679552 B2 JP7679552 B2 JP 7679552B2
- Authority
- JP
- Japan
- Prior art keywords
- escalator
- handrail
- automatic traveling
- traveling device
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Escalators And Moving Walkways (AREA)
Description
本開示は、自動走行装置、エスカレータおよび自動走行装置のエスカレータ乗車方法に関する。 The present disclosure relates to an automated driving device, an escalator, and a method for riding an escalator on an automated driving device.
従来から、エスカレータなどの乗客コンベア装置に乗り降りすることができる自動走行装置が知られている。 Automatic traveling devices that allow passengers to get on and off passenger conveyor devices such as escalators have been known for some time.
たとえば、特許文献1に記載の乗客コンベア装置は、乗客コンベアと、ロボットの走行を制御するためのロボット走行制御装置との間で信号の送受信を実施するための通信部と、乗客コンベアへのロボットの到着予想時刻に合わせて通信部で受信された乗客コンベアの速度変更の指令に基づいて、乗客コンベアの速度を通信部で受信した乗客コンベアへのロボットの乗降可能速度に変更する速度制御部とを備える。For example, the passenger conveyor device described in
しかしながら、特許文献1には、ロボットなどの自動走行装置が、エスカレータに乗車中に倒れないように支えるための手段が設けられていない。よって、自動走行装置がエスカレータに乗車中に倒れてしまう場合がある。However, in
それゆえに、本開示の目的は、自動走行装置がエスカレータに乗車中に倒れてしまうのを防止することができる自動走行装置、エスカレータおよび自動走行装置のエスカレータ乗車方法を提供することである。Therefore, the object of the present disclosure is to provide an automatic traveling device, an escalator, and a method of riding an escalator using an automatic traveling device, which can prevent the automatic traveling device from falling over while riding on an escalator.
本開示の自動走行装置は、少なくとも1つのアームと、プログラムを記憶するメモリと、プログラムを実行するプロセッサとを備える。プロセッサは、自動走行装置がエスカレータの乗車位置に到着したときに、少なくとも1つのアームがエスカレータの移動手摺をつかむように制御することによって、自動走行装置をエスカレータに乗車させる。The automated driving device disclosed herein includes at least one arm, a memory that stores a program, and a processor that executes the program. When the automated driving device arrives at a boarding position of the escalator, the processor controls the at least one arm to grab a moving handrail of the escalator, thereby causing the automated driving device to board the escalator.
本開示の自動走行装置のエスカレータ乗車方法は、自動走行装置が、自動走行装置がエスカレータの乗車位置に到着したときに、エスカレータに人が乗車していないときに限り、自動走行装置を停止させて、エスカレータも減速指令または停止指令を送信するステップと、エスカレータが、自動走行装置から減速指令または停止指令を受信したときに、エスカレータの踏み段、移動手摺、および欄干の走行を減速または停止させるステップと、自動走行装置が、自動走行装置がエスカレータの乗車位置に到着したときに、自動走行装置のアームがエスカレータの移動手摺をつかむように制御することによって、自動走行装置をエスカレータに乗車させるステップとを備える。The method of riding an escalator using an automatic traveling device disclosed herein includes the steps of: when the automatic traveling device reaches the boarding position of the escalator, stopping the automatic traveling device and causing the escalator to send a deceleration command or a stop command only if no person is riding on the escalator; when the escalator receives a deceleration command or a stop command from the automatic traveling device, slowing down or stopping the movement of the escalator steps, moving handrails, and balustrade; and when the automatic traveling device reaches the boarding position of the escalator, controlling the arm of the automatic traveling device to grab the moving handrail of the escalator, thereby causing the automatic traveling device to ride on the escalator.
本開示によれば、自動走行装置がエスカレータに乗車中に倒れてしまうのを防止することができる。 The present disclosure makes it possible to prevent an automatic driving device from falling over while riding on an escalator.
以下、実施の形態について、図面を参照して説明する。
実施の形態1.
図1は、エスカレータ50の構成を表わす図である。
Hereinafter, embodiments will be described with reference to the drawings.
FIG. 1 is a diagram showing the configuration of an
主枠1および欄干22は、エスカレータ50が配置される上の階の床と、エスカレータ50が配置される下の階の床との間に架け渡される。
The
上部乗降口2Aは、エスカレータ50が配置される上の階に配置される。下部乗降口2Bは、エスカレータ50が配置される下の階に配置される。エスカレータ50が上り用のエスカレータの場合に、下部乗降口2Bが乗車位置となり、上部乗降口2Aが降車位置となる。エスカレータ50が下り用のエスカレータの場合に、下部乗降口2Bが降車位置となり、上部乗降口2Aが乗車位置となる。上部乗降口2Aには、床面を形成する床板7Aが配置される。下部乗降口2Bには、床面を形成する床板7Bが配置される。
The upper boarding/
制御盤6は、踏み段4、移動手摺5、および欄干22の進行制御等、エスカレータ50全体の運行制御を司る。
The
無線通信機21は、自動走行装置10との間で通信可能に構成される。
制御装置8は、制御盤6を通じて、ビル内の複数のエスカレータ50を制御および管理するように構成される。制御装置8は、必要な情報を表示器9に表示し、スピーカ3から出力する。
The
The
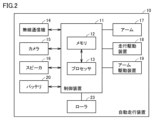
図2は、自動走行装置10の構成を表わす図である。
自動走行装置10は、無線通信機14と、カメラ15と、スピーカ16と、アーム17と、バッテリ20と、走行駆動装置18と、アーム駆動装置19と、制御装置11と、ローラ23とを備える。
FIG. 2 is a diagram showing the configuration of the
The
制御装置11は、メモリ12と、プロセッサ13とを備える。メモリ12は、プログラムを記憶する。プロセッサ13は、メモリ12に記憶されたプログラムを実行する。以下で説明する制御装置11の動作は、プロセッサ13がメモリ12内のプログラムを実行することによって行われる。The
無線通信機14は、たとえば、無線LAN(Local Area Network)などを通じて、エスカレータ50の制御盤6との間で通信を行なう。The
カメラ15は、エスカレータ50への乗降時において、エスカレータ50およびエスカレータ50の周囲を撮像し、撮像画像を制御装置11へ出力する。
When a passenger gets on or off the
走行駆動装置18は、自動走行装置10が走行するための駆動力を発生する。走行駆動装置18は、例えば、自動走行装置10が移動するための車輪と、車輪を駆動するモータとを含む。モータは、バッテリ20から電力の供給を受けて作動することができる。The
バッテリ20は、自動走行装置10を構成する各機器が作動するための電力を供給する。
The
アーム駆動装置19は、アーム17を駆動する。
図3は、自動走行装置10とエスカレータ50との位置関係を表わす図である。自動走行装置10は、エスカレータ50に乗車するときに、移動手摺5をつかむ。自動走行装置10は、エスカレータ50に乗車中は、移動手摺5にぶら下がった状態となる。自動走行装置10は、エスカレータ50から降車するときは、移動手摺5を放す。
The
3 is a diagram showing the positional relationship between the
図4は、アーム17およびローラ23の構成を表わす図である。
アーム17は、移動手摺5をつかむことができるように構成される。アーム17は、支点Xに接続され、自動走行装置10の本体と垂直に伸びる第1の部分171と、第1の部分171と接続し、かつ第1の部分171から90度方向に折れ曲がった方向に伸びる第2の部分172と、第2の部分172と接続し、かつ第2の部分172から(-90度)方向に折れ曲がった方向に伸びる第3の部分173と、第3の部分173と接続し、かつ第3の部分173から(-90度)方向に折れ曲がった方向に伸びる第4の部分174とを有する。第2の部分172は、第4の部分174と対向し、かつ第4の部分174と同じ長さの第5の部分175を有する。
FIG. 4 is a diagram showing the configuration of the
The
後述の図6(a)に示されるように、アーム17の第3の部分173が、移動手摺5の上面と接触し、アーム17の第4の部分174が移動手摺5の右側面と接触し、アーム17の第5の部分175が移動手摺5の左側面と接触することによって、アーム17が移動手摺5に引っ掛かった状態となる。アーム17は、移動手摺5の進行に従って、自動走行装置10の側面に位置する支点Xを中心に回転可能に構成される。ローラ23は、自動走行装置10の本体の側面に配置される。ローラ23は、欄干22の進行方向に沿って回転可能に構成される。As shown in FIG. 6(a) described below, the
図5は、自動走行装置10がエスカレータ50への乗車時におけるアーム17とエスカレータ50の移動手摺5および欄干22の接続状態を表わす図である。図5(a)は、鉛直上方向から見たときの状態を表わす。図5(b)は、乗車位置から見たときの接続状態を表わす。図5(c)は、エスカレータ50の横方向(欄干22に垂直な方向)から見たときの状態を表わす。アーム17が移動手摺5をつかむことによって、自動走行装置10がエスカレータに乗車する。
Figure 5 shows the connection state of the
図6は、自動走行装置10がエスカレータ50に乗車中におけるアーム17とエスカレータ50の移動手摺5および欄干22の接続状態を表わす図である。図6(a)は、鉛直上方向から見たときの状態を表わす。図6(b)は、乗車位置から見たときの接続状態を表わす。図6(c)は、エスカレータ50の横方向(欄干22に垂直な方向)から見たときの状態を表わす。アーム17が移動手摺5をつかむことによって、自動走行装置10は、空中に浮いた状態で、移動手摺5とともに移動する。ローラ23は、欄干22の内側板24に接触して、欄干22の進行方向に回転する。
Figure 6 shows the connection state of the
図7は、自動走行装置10がエスカレータ50からの降車時におけるアーム17とエスカレータ50の移動手摺5および欄干22の接続状態を表わす図である。図7(a)は、鉛直上方向から見たときの状態を表わす。図7(b)は、降車位置から見たときの接続状態を表わす。図7(c)は、エスカレータ50の横方向(欄干22に垂直な方向)から見たときの状態を表わす。
Figure 7 shows the connection state between the
移動手摺5の折り返しによって、アーム17が移動手摺5をつかむことができなくなることによって、アーム17が移動手摺5から放れるともに、自動走行装置10は、降車位置に着地する。
As the moving
図8は、実施の形態1の自動走行装置10およびエスカレータ50の動作手順を表わすフローチャートである。
Figure 8 is a flowchart showing the operating procedures of the
ステップS101において、制御装置11は、カメラ15から得られる画像に基づいて、自動走行装置10がエスカレータ50の乗車位置に到着したか否かを判断する。自動走行装置10がエスカレータ50の乗車位置に到着したときには、処理がステップS102に進む。In step S101, the
ステップS102において、制御装置11は、走行駆動装置18を制御することによって、自動走行装置10の走行を停止させる。In step S102, the
ステップS103において、制御装置11は、カメラ15から得られる画像に基づいて、エスカレータ50に人が乗車しているか否かを判断する。エスカレータ50に人が乗車している場合には、処理がステップS104に進む。エスカレータ50に人が乗車していない場合には、処理がステップS105に進む。In step S103, the
ステップS104において、制御装置11は、カメラ15から得られる画像に基づいて、エスカレータ50に人が乗車していない状態になるまで、走行駆動装置18を制御することによって、自動走行装置10の走行を停止する。In step S104, the
ステップS105において、制御装置11は、無線通信機14を通じて、エスカレータ50へ、エスカレータ50の停止指令を送信する。エスカレータ50の無線通信機21は、停止指令を受信する。エスカレータ50の制御盤6は、エスカレータ50の踏み段4、移動手摺5、および欄干22の進行を停止させる。In step S105, the
ステップS106において、制御装置11は、エスカレータ50が停止する旨のアナウンス音声をスピーカ16から出力させる。In step S106, the
ステップS107において、制御装置11は、カメラ15から得られる画像に基づいて、エスカレータ50の移動手摺5の位置を検知し、アーム駆動装置19を通じてアーム17が移動手摺5をつかむことができるようにアーム17を制御する。In step S107, the
ステップS108において、制御装置11は、無線通信機14を通じて、エスカレータ50へ、エスカレータ50の起動指令を送信する。エスカレータ50の無線通信機21は、起動指令を受信する。エスカレータ50の制御盤6は、エスカレータ50の踏み段4、移動手摺5および欄干22を進行させる。自動走行装置10は、移動手摺5にぶらさがる。ローラ23は、欄干22の進行方向に回転する。In step S108, the
ステップS109において、制御装置11は、エスカレータ50が起動する旨のアナウンス音声をスピーカ16から出力させる。In step S109, the
ステップS110において、制御装置11は、エスカレータ50に人が乗車しないように依頼する旨のアナウンス音声をスピーカ16から出力させる。In step S110, the
ステップS111において、自動走行装置10がエスカレータ50の降車位置に到着したときには、処理がステップS112に進む。
In step S111, when the
ステップS112において、移動手摺5の折り返しによって、アーム17が移動手摺5から放れる。自動走行装置10は、降車位置に着地する。In step S112, the
実施の形態2.
実施の形態1では、自動走行装置10がエスカレータ50に乗り降りするときに、エスカレータ50を停止させた。実施の形態2では、自動走行装置10がエスカレータ50に乗り降りするときに、エスカレータ50を減速させる。
Embodiment 2.
In the first embodiment, the
図9は、実施の形態2の自動走行装置10およびエスカレータ50の動作手順を表わすフローチャートである。
Figure 9 is a flowchart showing the operating procedures of the
ステップS201において、制御装置11は、カメラ15から得られる画像に基づいて、自動走行装置10がエスカレータ50の乗車位置に到着したか否かを判断する。自動走行装置10がエスカレータ50の乗車位置に到着したときには、処理がステップS202に進む。In step S201, the
ステップS202において、制御装置11は、走行駆動装置18を制御することによって、自動走行装置10の走行を停止させる。In step S202, the
ステップS203において、制御装置11は、カメラ15から得られる画像に基づいて、エスカレータ50に人が乗車しているか否かを判断する。エスカレータ50に人が乗車している場合には、処理がステップS204に進む。エスカレータ50に人が乗車していない場合には、処理がステップS205に進む。In step S203, the
ステップS204において、制御装置11は、カメラ15から得られる画像に基づいて、エスカレータ50に人が乗車していない状態になるまで、走行駆動装置18を制御することによって、自動走行装置10の走行を停止する。In step S204, the
ステップS205において、制御装置11は、無線通信機14を通じて、エスカレータ50へ、エスカレータ50の減速指令を送信する。エスカレータ50の無線通信機21は、減速指令を受信する。エスカレータ50の制御盤6は、エスカレータ50の踏み段4、移動手摺5、および欄干22の進行を減速させる。In step S205, the
ステップS206において、制御装置11は、エスカレータ50が減速する旨のアナウンス音声をスピーカ16から出力させる。In step S206, the
ステップS207において、制御装置11は、カメラ15から得られる画像に基づいて、エスカレータ50の移動手摺5の位置を検知し、アーム駆動装置19を通じてアーム17が移動手摺5をつかむことができるようにアーム17を制御する。In step S207, the
ステップS208において、制御装置11は、無線通信機14を通じて、エスカレータ50へ、エスカレータ50の増速指令を送信する。エスカレータ50の無線通信機21は、増速指令を受信する。エスカレータ50の制御盤6は、エスカレータ50の踏み段4、移動手摺5、および欄干22の進行を増速させる。自動走行装置10は、移動手摺5にぶらさがる。ローラ23は、欄干22の進行方向に回転する。
In step S208, the
ステップS209において、制御装置11は、エスカレータ50が増速する旨のアナウンス音声をスピーカ16から出力させる。In step S209, the
ステップS210において、制御装置11は、エスカレータ50に人が乗車しないように依頼する旨のアナウンス音声をスピーカ16から出力させる。In step S210, the
ステップS211において、自動走行装置10がエスカレータ50の降車位置に到着したときには、処理がステップS212に進む。
In step S211, when the
ステップS212において、制御装置11は、無線通信機14を通じて、エスカレータ50へ、エスカレータ50の減速指令を送信する。エスカレータ50の無線通信機21は、減速指令を受信する。エスカレータ50の制御盤6は、エスカレータ50の踏み段4、移動手摺5、および欄干22の進行を減速させる。In step S212, the
ステップS213において、制御装置11は、エスカレータ50が減速する旨のアナウンス音声をスピーカ16から出力させる。In step S213, the
ステップS214において、移動手摺5の折り返しによって、アーム17が移動手摺5から放れる。自動走行装置10は、降車位置に着地する。In step S214, the
ステップS215において、制御装置11は、無線通信機14を通じて、エスカレータ50へ、エスカレータ50の増速指令を送信する。エスカレータ50の無線通信機21は、増速指令を受信する。エスカレータ50の制御盤6は、エスカレータ50の踏み段4、移動手摺5、および欄干22の進行を増速させる。In step S215, the
ステップS216において、制御装置11は、エスカレータ50が増速する旨のアナウンス音声をスピーカ16から出力させる。In step S216, the
実施の形態3.
図10は、実施の形態3の自動走行装置10と、エスカレータ50との接続状態を表わす図である。
FIG. 10 is a diagram showing a connection state between automatic traveling
自動走行装置10は、右アーム17Aと、左アーム17Bと、右ローラ23Aと、左ローラ23Bとを備える。The
右アーム17Aは、自動走行装置10の本体の右側に配置される。左アーム17Bは、自動走行装置10の本体の左側に配置される。
The
アーム駆動装置19は、実施の形態1および2においてアーム17を制御したのと同様にして、右アーム17Aおよび左アーム17Bとを制御することができる。
The
右ローラ23Aは、右側の欄干22Aの内側板24Aに接触して、右側の欄干22Aの進行方向に回転可能に構成される。左ローラ23Bは、左側の欄干22Bの内側板24Bに接触して、左側の欄干22Bの進行方向に回転可能に構成される。The
変形例.
(アナウンス)
上記の実施形態では、自動走行装置10のスピーカ16がエスカレータ50の減速などをアナウンスすることとしたが、これに限定されるものではない。エスカレータ50のスピーカ3がエスカレータ50の減速などをアナウンスすることとしてもよい。
Variant examples.
(announcement)
In the above embodiment, the
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本開示の範囲は、上記した説明ではなくて請求の範囲によって示され、請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。The embodiments disclosed herein should be considered to be illustrative and not restrictive in all respects. The scope of the present disclosure is indicated by the claims, not the above description, and is intended to include all modifications within the meaning and scope of the claims.
1 主枠、2A 上部乗降口、2B 下部乗降口、3,16 スピーカ、4 踏み段、5 移動手摺、6 制御盤、7A,7B 床板、8,11 制御装置、9 表示器、10 自動走行装置、12 メモリ、13 プロセッサ、14,21 無線通信機、15 カメラ、17 アーム、17A 右アーム、17B 左アーム、18 走行駆動装置、19 アーム駆動装置、20 バッテリ、22,22A,22B 欄干、23 ローラ、23A 右ローラ、23B 左ローラ、24,24A,24B 内側板、50 エスカレータ、171 第1の部分、172 第2の部分、173 第3の部分、174 第4の部分、175 第5の部分、X 支点。 1 Main frame, 2A Upper boarding/alighting entrance, 2B Lower boarding/alighting entrance, 3, 16 Speaker, 4 Step, 5 Moving handrail, 6 Control panel, 7A, 7B Floor board, 8, 11 Control device, 9 Display, 10 Automatic driving device, 12 Memory, 13 Processor, 14, 21 Wireless communication device, 15 Camera, 17 Arm, 17A Right arm, 17B Left arm, 18 Traveling drive device, 19 Arm drive device, 20 Battery, 22, 22A, 22B Parapet, 23 Roller, 23A Right roller, 23B Left roller, 24, 24A, 24B Inner plate, 50 Escalator, 171 First part, 172 Second part, 173 Third part, 174 Fourth part, 175 Fifth part, X Pivot.
Claims (16)
前記自動走行装置の本体の左側に配置された第1アームと、前記自動走行装置の本体の右側に配置された第2アームと
前記自動走行装置の本体の左側の側面に配置された第1ローラと、前記自動走行装置の本体の右側の側面に配置された第2ローラと、
プログラムを記憶するメモリと、
前記プログラムを実行するプロセッサと、を備え、
前記プロセッサは、前記自動走行装置がエスカレータの乗車位置に到着したときに、前記第1アームが前記エスカレータの左側の移動手摺をつかむように制御し、前記第2アームが前記エスカレータの右側の移動手摺をつかむように制御することによって、前記自動走行装置を前記エスカレータに乗車させ、
前記第1アームが前記左側の移動手摺をつかみ、前記第2アームが前記右側の移動手摺をつかんだ後、前記左側の移動手摺および前記右側の移動手摺の進行に従って、前記自動走行装置が前記左側の移動手摺および前記右側の移動手摺にぶら下がった状態となり、
前記第1ローラは、前記エスカレータの左側の欄干の内側板と接触して、前記左側の欄干の進行方向に回転するように構成され、前記第2ローラは、前記エスカレータの右側の欄干の内側板と接触して、前記右側の欄干の進行方向に回転するように構成される、自動走行装置。 An automatic driving device,
a first arm arranged on the left side of a main body of the automatic traveling device, a second arm arranged on the right side of the main body of the automatic traveling device, a first roller arranged on the left side of the main body of the automatic traveling device, and a second roller arranged on the right side of the main body of the automatic traveling device,
A memory for storing a program;
A processor for executing the program,
when the automated driving device arrives at a boarding position of the escalator, the processor controls the first arm to grab a moving handrail on the left side of the escalator and controls the second arm to grab a moving handrail on the right side of the escalator, thereby causing the automated driving device to board the escalator;
After the first arm grasps the left handrail and the second arm grasps the right handrail, the automatic traveling device is suspended from the left handrail and the right handrail as the left handrail and the right handrail move forward,
An automatic traveling device, wherein the first roller is configured to contact the inner plate of a left handrail of the escalator and rotate in the direction of travel of the left handrail, and the second roller is configured to contact the inner plate of a right handrail of the escalator and rotate in the direction of travel of the right handrail.
前記プロセッサは、前記自動走行装置が前記エスカレータの前記乗車位置に到着したときに、前記エスカレータに前記無線通信機を通じて、減速指令または停止指令を送信する、請求項1記載の自動走行装置。 Equipped with a wireless communication device,
The automatic traveling device according to claim 1 , wherein the processor transmits a deceleration command or a stop command to the escalator via the wireless communication device when the automatic traveling device arrives at the boarding position of the escalator.
前記プロセッサは、前記減速指令または前記停止指令を送信する場合には、さらに、前記スピーカを通じて、前記エスカレータが減速または停止する旨をアナウンスする、請求項4記載の自動走行装置。 Equipped with a speaker,
The automatic driving device according to claim 4 , wherein, when the processor transmits the deceleration command or the stop command, the processor further announces through the speaker that the escalator will decelerate or stop.
前記プロセッサは、前記増速指令または前記起動指令を送信する場合に、さらに、前記スピーカを通じて、前記エスカレータが増速または起動する旨をアナウンスする、請求項6記載の自動走行装置。 Equipped with a speaker,
The automatic driving device according to claim 6 , wherein when the processor transmits the speed increase command or the start command, the processor further announces through the speaker that the escalator will speed up or start.
前記プロセッサは、前記自動走行装置が前記エスカレータの前記降車位置に到着したときに、前記エスカレータに前記無線通信機を通じて、減速指令を送信する、請求項9記載の自動走行装置。 Equipped with a wireless communication device,
The automated driving device according to claim 9 , wherein the processor transmits a deceleration command to the escalator via the wireless communication device when the automated driving device arrives at the disembarking position of the escalator.
前記プロセッサは、前記減速指令を送信する場合には、さらに、前記スピーカを通じて、前記エスカレータが減速する旨をアナウンスする、請求項10記載の自動走行装置。 Equipped with a speaker,
The automatic driving device according to claim 10 , wherein, when the processor transmits the deceleration command, the processor further announces through the speaker that the escalator will decelerate.
前記プロセッサは、前記増速指令を送信する場合には、さらに、前記スピーカを通じて、前記エスカレータが増速する旨をアナウンスする、請求項12記載の自動走行装置。 Equipped with a speaker,
The automatic driving device according to claim 12, wherein, when the processor transmits the speed increase command, the processor further announces through the speaker that the speed of the escalator will increase.
請求項4または10記載の自動走行装置から減速指令または停止指令を受信する無線通信機と、
前記無線通信機が、前記減速指令または停止指令を受信したときに、前記踏み段と、前記左側の移動手摺および前記右側の移動手摺と、前記左側の欄干および前記右側の欄干の走行を減速または停止させる制御盤と、を備えたエスカレータ。 a step, a left handrail and a right handrail, a left balustrade and a right balustrade,
a wireless communication device for receiving a deceleration command or a stop command from the automatic driving device according to claim 4 or 10;
An escalator comprising: a control panel that, when the wireless communication device receives the deceleration command or the stop command, decelerates or stops the steps, the left handrail, the right handrail, and the left balustrade and the right handrail.
請求項6記載の自動走行装置から増速指令または起動指令を受信する無線通信機と、
前記無線通信機が、前記増速指令または起動指令を受信したときに、前記踏み段と、前記左側の移動手摺および前記右側の移動手摺と、前記左側の欄干および前記右側の欄干の走行を増速または起動させる制御盤と、を備えたエスカレータ。 a step, a left handrail and a right handrail, a left balustrade and a right balustrade,
a wireless communication device for receiving a speed increase command or a start command from the automatic driving device according to claim 6;
The escalator includes a control panel that, when the wireless communication device receives the speed-up command or start command, increases the speed of the steps, the left handrail, the right handrail, and the left balustrade and the right handrail, or starts the travel of the steps, the left handrail, the right handrail, and the right handrail.
前記自動走行装置が、前記自動走行装置がエスカレータの乗車位置に到着したときに、前記エスカレータに人が乗車していないときに限り、前記自動走行装置を停止させて、前記エスカレータも減速指令または停止指令を送信するステップと、
前記エスカレータが、前記自動走行装置から減速指令または停止指令を受信したときに、前記エスカレータの踏み段、移動手摺、および欄干の走行を減速または停止させるステップと、
前記自動走行装置が、前記自動走行装置が前記エスカレータの乗車位置に到着したときに、前記自動走行装置の本体の左側に配置された第1アームが前記エスカレータの左側の移動手摺をつかむように制御し、前記自動走行装置の本体の右側に配置された第2アームが前記エスカレータの右側の移動手摺をつかむように制御することによって、前記自動走行装置を前記エスカレータに乗車させるステップと、
前記第1アームが前記左側の移動手摺をつかみ、前記第2アームが前記右側の移動手摺をつかんだ後、前記左側の移動手摺および前記右側の移動手摺の進行に従って、前記自動走行装置が、前記左側の移動手摺および前記右側の移動手摺にぶら下がった状態となるステップと、
前記自動走行装置の本体の左側の側面に配置された第1ローラが、前記エスカレータの左側の欄干の内側板と接触して、前記左側の欄干の進行方向に回転し、前記自動走行装置の本体の右側の側面に配置された第2ローラが、前記エスカレータの右側の欄干の内側板と接触して、前記右側の欄干の進行方向に回転するステップと、を備えた、自動走行装置のエスカレータ乗車方法。 A method for riding an escalator on an automatic traveling device, comprising the steps of:
a step of the automatic traveling device stopping the automatic traveling device and transmitting a deceleration command or a stop command to the escalator only when the automatic traveling device arrives at a boarding position of the escalator and only if no person is on the escalator;
a step of slowing down or stopping travel of steps, moving handrails, and balustrades of the escalator when the escalator receives a deceleration command or a stop command from the automatic traveling device;
a step of causing the automatic traveling device to ride on the escalator by controlling a first arm arranged on the left side of a main body of the automatic traveling device to grab a moving handrail on the left side of the escalator and controlling a second arm arranged on the right side of the main body of the automatic traveling device to grab a moving handrail on the right side of the escalator when the automatic traveling device arrives at a boarding position of the escalator;
a step in which the first arm grasps the left handrail and the second arm grasps the right handrail, and then the automatic traveling device is suspended from the left handrail and the right handrail according to the progress of the left handrail and the right handrail;
a first roller arranged on the left side of the main body of the automatic traveling device contacts the inner plate of the left hand rail of the escalator and rotates in the direction of travel of the left hand rail, and a second roller arranged on the right side of the main body of the automatic traveling device contacts the inner plate of the right hand rail of the escalator and rotates in the direction of travel of the right hand rail.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/021087 WO2023228240A1 (en) | 2022-05-23 | 2022-05-23 | Automatic traveling device, escalator, and method for allowing automatic traveling device to ride escalator |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2023228240A1 JPWO2023228240A1 (en) | 2023-11-30 |
| JPWO2023228240A5 JPWO2023228240A5 (en) | 2024-10-18 |
| JP7679552B2 true JP7679552B2 (en) | 2025-05-19 |
Family
ID=88918822
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024522736A Active JP7679552B2 (en) | 2022-05-23 | 2022-05-23 | Automatic travel device, escalator, and method for riding an escalator on an automatic travel device |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7679552B2 (en) |
| CN (1) | CN119255890A (en) |
| WO (1) | WO2023228240A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008229788A (en) | 2007-03-22 | 2008-10-02 | Toyota Motor Corp | Inverted moving body |
| JP2019001613A (en) | 2017-06-15 | 2019-01-10 | 株式会社日立ビルシステム | Passenger conveyor device, control method of passenger control device, and control system for passenger conveyor device |
| JP2021172474A (en) | 2020-04-22 | 2021-11-01 | 康彦 可知 | Lifting device |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5421394U (en) * | 1977-07-15 | 1979-02-10 | ||
| DE2809435A1 (en) * | 1978-03-04 | 1979-09-13 | Orenstein & Koppel Ag | ESCAPE STAIRS WITH TAKE-AWAY DEVICE FOR CARRYING TRANSPORT CART |
| JP3548287B2 (en) * | 1995-07-20 | 2004-07-28 | 三菱電機ビルテクノサービス株式会社 | Working scaffold for escalator and method of attaching the same |
| JPH11335057A (en) * | 1998-05-29 | 1999-12-07 | Nippon Fillester Co Ltd | Wheelchair loading device for escalator |
| JP2015003810A (en) * | 2013-06-21 | 2015-01-08 | 株式会社日立ビルシステム | Luggage transport device for passenger conveyors |
-
2022
- 2022-05-23 CN CN202280096264.4A patent/CN119255890A/en active Pending
- 2022-05-23 JP JP2024522736A patent/JP7679552B2/en active Active
- 2022-05-23 WO PCT/JP2022/021087 patent/WO2023228240A1/en not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008229788A (en) | 2007-03-22 | 2008-10-02 | Toyota Motor Corp | Inverted moving body |
| JP2019001613A (en) | 2017-06-15 | 2019-01-10 | 株式会社日立ビルシステム | Passenger conveyor device, control method of passenger control device, and control system for passenger conveyor device |
| JP2021172474A (en) | 2020-04-22 | 2021-11-01 | 康彦 可知 | Lifting device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN119255890A (en) | 2025-01-03 |
| WO2023228240A1 (en) | 2023-11-30 |
| JPWO2023228240A1 (en) | 2023-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019001613A (en) | Passenger conveyor device, control method of passenger control device, and control system for passenger conveyor device | |
| KR100896872B1 (en) | Elevator controller and method of operating elevator | |
| US20240109754A1 (en) | Emergency evacuation robot | |
| JP2002255460A (en) | Operation control method and operation control device for elevator system | |
| JP7679552B2 (en) | Automatic travel device, escalator, and method for riding an escalator on an automatic travel device | |
| CN1878711A (en) | Automatic passenger conveyor slow speed operation | |
| EP0983956A3 (en) | Emergency stop device releasing method for elevator | |
| JP7580668B2 (en) | Automatic travel device, escalator, and method for riding an escalator on an automatic travel device | |
| JP3375454B2 (en) | Elevator seismic control operation device | |
| JP7677738B1 (en) | Elevator control system and elevator control method | |
| KR20100047594A (en) | Driving apparatus of elevator and control method thereof | |
| JPWO2023228240A5 (en) | ||
| JP7625752B1 (en) | Elevator Autonomous Mobile Communication System | |
| JP7670207B1 (en) | Facility system, facility control device, facility control method, and facility control program | |
| JP7625753B1 (en) | Autonomous mobile object control system and autonomous mobile object control method | |
| JP3507290B2 (en) | Control device for escalator with steps for wheelchair | |
| JP2003081558A (en) | Elevator device for connecting bridge | |
| JP7761110B1 (en) | Elevator system, call control method, hall control device, and call program | |
| JP7485474B1 (en) | Passenger conveyor and passenger conveyor control method | |
| JPH04361968A (en) | Elevator | |
| KR102308850B1 (en) | Safe operation control appartus of escalator and moving walk | |
| JP2005225604A (en) | Evacuation method for double deck elevator | |
| JP2026056241A (en) | Elevator control device, elevator control system, and elevator control method | |
| JP2026002006A (en) | Autonomous mobile body, autonomous mobile body control system, and autonomous mobile body control method | |
| JPH11301940A (en) | Inspection running device for elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240809 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240809 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20240809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240910 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250408 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7679552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |