JP7679552B2 - 自動走行装置、エスカレータおよび自動走行装置のエスカレータ乗車方法 - Google Patents
自動走行装置、エスカレータおよび自動走行装置のエスカレータ乗車方法 Download PDFInfo
- Publication number
- JP7679552B2 JP7679552B2 JP2024522736A JP2024522736A JP7679552B2 JP 7679552 B2 JP7679552 B2 JP 7679552B2 JP 2024522736 A JP2024522736 A JP 2024522736A JP 2024522736 A JP2024522736 A JP 2024522736A JP 7679552 B2 JP7679552 B2 JP 7679552B2
- Authority
- JP
- Japan
- Prior art keywords
- escalator
- handrail
- automatic traveling
- traveling device
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Escalators And Moving Walkways (AREA)
Description
実施の形態1.
図1は、エスカレータ50の構成を表わす図である。
制御装置8は、制御盤6を通じて、ビル内の複数のエスカレータ50を制御および管理するように構成される。制御装置8は、必要な情報を表示器9に表示し、スピーカ3から出力する。
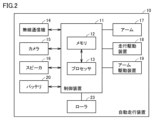
自動走行装置10は、無線通信機14と、カメラ15と、スピーカ16と、アーム17と、バッテリ20と、走行駆動装置18と、アーム駆動装置19と、制御装置11と、ローラ23とを備える。
図3は、自動走行装置10とエスカレータ50との位置関係を表わす図である。自動走行装置10は、エスカレータ50に乗車するときに、移動手摺5をつかむ。自動走行装置10は、エスカレータ50に乗車中は、移動手摺5にぶら下がった状態となる。自動走行装置10は、エスカレータ50から降車するときは、移動手摺5を放す。
アーム17は、移動手摺5をつかむことができるように構成される。アーム17は、支点Xに接続され、自動走行装置10の本体と垂直に伸びる第1の部分171と、第1の部分171と接続し、かつ第1の部分171から90度方向に折れ曲がった方向に伸びる第2の部分172と、第2の部分172と接続し、かつ第2の部分172から(-90度)方向に折れ曲がった方向に伸びる第3の部分173と、第3の部分173と接続し、かつ第3の部分173から(-90度)方向に折れ曲がった方向に伸びる第4の部分174とを有する。第2の部分172は、第4の部分174と対向し、かつ第4の部分174と同じ長さの第5の部分175を有する。
実施の形態1では、自動走行装置10がエスカレータ50に乗り降りするときに、エスカレータ50を停止させた。実施の形態2では、自動走行装置10がエスカレータ50に乗り降りするときに、エスカレータ50を減速させる。
図10は、実施の形態3の自動走行装置10と、エスカレータ50との接続状態を表わす図である。
(アナウンス)
上記の実施形態では、自動走行装置10のスピーカ16がエスカレータ50の減速などをアナウンスすることとしたが、これに限定されるものではない。エスカレータ50のスピーカ3がエスカレータ50の減速などをアナウンスすることとしてもよい。
Claims (16)
- 自動走行装置であって、
前記自動走行装置の本体の左側に配置された第1アームと、前記自動走行装置の本体の右側に配置された第2アームと
前記自動走行装置の本体の左側の側面に配置された第1ローラと、前記自動走行装置の本体の右側の側面に配置された第2ローラと、
プログラムを記憶するメモリと、
前記プログラムを実行するプロセッサと、を備え、
前記プロセッサは、前記自動走行装置がエスカレータの乗車位置に到着したときに、前記第1アームが前記エスカレータの左側の移動手摺をつかむように制御し、前記第2アームが前記エスカレータの右側の移動手摺をつかむように制御することによって、前記自動走行装置を前記エスカレータに乗車させ、
前記第1アームが前記左側の移動手摺をつかみ、前記第2アームが前記右側の移動手摺をつかんだ後、前記左側の移動手摺および前記右側の移動手摺の進行に従って、前記自動走行装置が前記左側の移動手摺および前記右側の移動手摺にぶら下がった状態となり、
前記第1ローラは、前記エスカレータの左側の欄干の内側板と接触して、前記左側の欄干の進行方向に回転するように構成され、前記第2ローラは、前記エスカレータの右側の欄干の内側板と接触して、前記右側の欄干の進行方向に回転するように構成される、自動走行装置。 - 前記プロセッサは、前記自動走行装置が前記エスカレータの乗車位置に到着したときに、前記自動走行装置を停止させた後、前記第1アームが前記左側の移動手摺をつかみ、前記第2アームが前記右側の移動手摺をつかむように制御する、請求項1記載の自動走行装置。
- 前記プロセッサは、前記自動走行装置が前記エスカレータの前記乗車位置に到着したときに、前記エスカレータに人が乗車していないときに限り、前記自動走行装置を前記エスカレータに乗車させる、請求項1記載の自動走行装置。
- 無線通信機を備え、
前記プロセッサは、前記自動走行装置が前記エスカレータの前記乗車位置に到着したときに、前記エスカレータに前記無線通信機を通じて、減速指令または停止指令を送信する、請求項1記載の自動走行装置。 - スピーカを備え、
前記プロセッサは、前記減速指令または前記停止指令を送信する場合には、さらに、前記スピーカを通じて、前記エスカレータが減速または停止する旨をアナウンスする、請求項4記載の自動走行装置。 - 前記プロセッサは、前記第1アームが前記左側の移動手摺をつかみ、前記第2アームが前記右側の移動手摺をつかんだ後、前記エスカレータに前記無線通信機を通じて増速指令または起動指令を送信する、請求項4記載の自動走行装置。
- スピーカを備え、
前記プロセッサは、前記増速指令または前記起動指令を送信する場合に、さらに、前記スピーカを通じて、前記エスカレータが増速または起動する旨をアナウンスする、請求項6記載の自動走行装置。 - 前記プロセッサは、前記自動走行装置が前記エスカレータに乗車した後に、さらに、前記スピーカを通じて、前記エスカレータに人が乗車しないように依頼する旨をアナウンスする、請求項7記載の自動走行装置。
- 前記プロセッサは、前記自動走行装置が前記エスカレータの降車位置に到着したときに、前記第1アームが前記左側の移動手摺を放し、前記第2アームが前記右側の移動手摺をを放すことによって、前記自動走行装置を前記エスカレータから降車させる、請求項1に記載の自動走行装置。
- 無線通信機を備え、
前記プロセッサは、前記自動走行装置が前記エスカレータの前記降車位置に到着したときに、前記エスカレータに前記無線通信機を通じて、減速指令を送信する、請求項9記載の自動走行装置。 - スピーカを備え、
前記プロセッサは、前記減速指令を送信する場合には、さらに、前記スピーカを通じて、前記エスカレータが減速する旨をアナウンスする、請求項10記載の自動走行装置。 - 前記プロセッサは、前記自動走行装置が前記エスカレータから降車した後に、前記エスカレータに前記無線通信機を通じて増速指令を送信する、請求項10記載の自動走行装置。
- スピーカを備え、
前記プロセッサは、前記増速指令を送信する場合には、さらに、前記スピーカを通じて、前記エスカレータが増速する旨をアナウンスする、請求項12記載の自動走行装置。 - 踏み段と、左側の移動手摺および右側の移動手摺と、左側の欄干および右側の欄干と、
請求項4または10記載の自動走行装置から減速指令または停止指令を受信する無線通信機と、
前記無線通信機が、前記減速指令または停止指令を受信したときに、前記踏み段と、前記左側の移動手摺および前記右側の移動手摺と、前記左側の欄干および前記右側の欄干の走行を減速または停止させる制御盤と、を備えたエスカレータ。 - 踏み段と、左側の移動手摺および右側の移動手摺と、左側の欄干および右側の欄干と、
請求項6記載の自動走行装置から増速指令または起動指令を受信する無線通信機と、
前記無線通信機が、前記増速指令または起動指令を受信したときに、前記踏み段と、前記左側の移動手摺および前記右側の移動手摺と、前記左側の欄干および前記右側の欄干の走行を増速または起動させる制御盤と、を備えたエスカレータ。 - 自動走行装置のエスカレータ乗車方法であって、
前記自動走行装置が、前記自動走行装置がエスカレータの乗車位置に到着したときに、前記エスカレータに人が乗車していないときに限り、前記自動走行装置を停止させて、前記エスカレータも減速指令または停止指令を送信するステップと、
前記エスカレータが、前記自動走行装置から減速指令または停止指令を受信したときに、前記エスカレータの踏み段、移動手摺、および欄干の走行を減速または停止させるステップと、
前記自動走行装置が、前記自動走行装置が前記エスカレータの乗車位置に到着したときに、前記自動走行装置の本体の左側に配置された第1アームが前記エスカレータの左側の移動手摺をつかむように制御し、前記自動走行装置の本体の右側に配置された第2アームが前記エスカレータの右側の移動手摺をつかむように制御することによって、前記自動走行装置を前記エスカレータに乗車させるステップと、
前記第1アームが前記左側の移動手摺をつかみ、前記第2アームが前記右側の移動手摺をつかんだ後、前記左側の移動手摺および前記右側の移動手摺の進行に従って、前記自動走行装置が、前記左側の移動手摺および前記右側の移動手摺にぶら下がった状態となるステップと、
前記自動走行装置の本体の左側の側面に配置された第1ローラが、前記エスカレータの左側の欄干の内側板と接触して、前記左側の欄干の進行方向に回転し、前記自動走行装置の本体の右側の側面に配置された第2ローラが、前記エスカレータの右側の欄干の内側板と接触して、前記右側の欄干の進行方向に回転するステップと、を備えた、自動走行装置のエスカレータ乗車方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/021087 WO2023228240A1 (ja) | 2022-05-23 | 2022-05-23 | 自動走行装置、エスカレータおよび自動走行装置のエスカレータ乗車方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2023228240A1 JPWO2023228240A1 (ja) | 2023-11-30 |
| JPWO2023228240A5 JPWO2023228240A5 (ja) | 2024-10-18 |
| JP7679552B2 true JP7679552B2 (ja) | 2025-05-19 |
Family
ID=88918822
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024522736A Active JP7679552B2 (ja) | 2022-05-23 | 2022-05-23 | 自動走行装置、エスカレータおよび自動走行装置のエスカレータ乗車方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7679552B2 (ja) |
| CN (1) | CN119255890A (ja) |
| WO (1) | WO2023228240A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008229788A (ja) | 2007-03-22 | 2008-10-02 | Toyota Motor Corp | 倒立型移動体 |
| JP2019001613A (ja) | 2017-06-15 | 2019-01-10 | 株式会社日立ビルシステム | 乗客コンベアー装置、乗客コンベアー装置の制御方法、および乗客コンベアー装置制御システム |
| JP2021172474A (ja) | 2020-04-22 | 2021-11-01 | 康彦 可知 | 昇降装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5421394U (ja) * | 1977-07-15 | 1979-02-10 | ||
| DE2809435A1 (de) * | 1978-03-04 | 1979-09-13 | Orenstein & Koppel Ag | Fahrtreppe mit mitnahmeeinrichtung zur mitfuehrung von transportwagen |
| JP3548287B2 (ja) * | 1995-07-20 | 2004-07-28 | 三菱電機ビルテクノサービス株式会社 | エスカレーターの作業用足場台およびその取り付け方法 |
| JPH11335057A (ja) * | 1998-05-29 | 1999-12-07 | Nippon Fillester Co Ltd | エスカレータの車椅子乗載装置 |
| JP2015003810A (ja) * | 2013-06-21 | 2015-01-08 | 株式会社日立ビルシステム | 乗客コンベアの荷物運搬装置 |
-
2022
- 2022-05-23 CN CN202280096264.4A patent/CN119255890A/zh active Pending
- 2022-05-23 JP JP2024522736A patent/JP7679552B2/ja active Active
- 2022-05-23 WO PCT/JP2022/021087 patent/WO2023228240A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008229788A (ja) | 2007-03-22 | 2008-10-02 | Toyota Motor Corp | 倒立型移動体 |
| JP2019001613A (ja) | 2017-06-15 | 2019-01-10 | 株式会社日立ビルシステム | 乗客コンベアー装置、乗客コンベアー装置の制御方法、および乗客コンベアー装置制御システム |
| JP2021172474A (ja) | 2020-04-22 | 2021-11-01 | 康彦 可知 | 昇降装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN119255890A (zh) | 2025-01-03 |
| WO2023228240A1 (ja) | 2023-11-30 |
| JPWO2023228240A1 (ja) | 2023-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019001613A (ja) | 乗客コンベアー装置、乗客コンベアー装置の制御方法、および乗客コンベアー装置制御システム | |
| KR100896872B1 (ko) | 엘리베이터 제어 장치 및 엘리베이터의 운전 방법 | |
| US20240109754A1 (en) | Emergency evacuation robot | |
| JP2002255460A (ja) | エレベータシステムの運行制御方法および運行制御装置 | |
| JP7679552B2 (ja) | 自動走行装置、エスカレータおよび自動走行装置のエスカレータ乗車方法 | |
| CN1878711A (zh) | 自动乘客输送机的低速运行 | |
| EP0983956A3 (en) | Emergency stop device releasing method for elevator | |
| JP7580668B2 (ja) | 自動走行装置、エスカレータおよび自動走行装置のエスカレータ乗車方法 | |
| JP3375454B2 (ja) | エレベータの地震時管制運転装置 | |
| JP7677738B1 (ja) | エレベータ制御システムおよびエレベータ制御方法 | |
| KR20100047594A (ko) | 엘리베이터 구동장치 및 그 제어방법 | |
| JPWO2023228240A5 (ja) | ||
| JP7625752B1 (ja) | エレベータ自律移動体連携システム | |
| JP7670207B1 (ja) | 設備システム、設備制御装置、設備制御方法、および設備制御プログラム | |
| JP7625753B1 (ja) | 自律移動体制御システムおよび自律移動体制御方法 | |
| JP3507290B2 (ja) | 車いす用踏段付きエスカレータの制御装置 | |
| JP2003081558A (ja) | 連絡橋用エレベーター装置 | |
| JP7761110B1 (ja) | エレベータシステム、呼び制御方法、乗場制御装置、及び、呼びプログラム | |
| JP7485474B1 (ja) | 乗客コンベア及び乗客コンベアの制御方法 | |
| JPH04361968A (ja) | エレベーター装置 | |
| KR102308850B1 (ko) | 에스컬레이터 및 무빙워크의 안전운행 제어장치 | |
| JP2005225604A (ja) | ダブルデッキエレベータの避難運転方法 | |
| JP2026056241A (ja) | エレベータ制御装置、エレベータ制御システムおよびエレベータ制御方法 | |
| JP2026002006A (ja) | 自律移動体、自律移動体制御システムおよび自律移動体制御方法 | |
| JPH11301940A (ja) | エレベーターのインスペクション運転装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240809 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240809 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20240809 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240910 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250408 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250507 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7679552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |