JP7684191B2 - 作業計画更新システム、および、作業計画更新方法 - Google Patents
作業計画更新システム、および、作業計画更新方法 Download PDFInfo
- Publication number
- JP7684191B2 JP7684191B2 JP2021177604A JP2021177604A JP7684191B2 JP 7684191 B2 JP7684191 B2 JP 7684191B2 JP 2021177604 A JP2021177604 A JP 2021177604A JP 2021177604 A JP2021177604 A JP 2021177604A JP 7684191 B2 JP7684191 B2 JP 7684191B2
- Authority
- JP
- Japan
- Prior art keywords
- work
- task
- efficiency
- tasks
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Landscapes
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Manipulator (AREA)
Description
そこで、本発明は、環境変化に対してロバストに作業計画を更新することを課題とする。
その他の手段については、発明を実施するための形態のなかで説明する。
図1は、第1の実施形態に係る作業計画更新システム1の構成図である。
作業計画更新システム1は、データ・インタフェース部11と、作業状態処理装置12と、作業管理データベース13と、作業リソース処理装置14と、作業指示操作装置15とを含んで構成されている。この作業計画更新システム1は、作業員2a~2cと作業ロボットシステムを用いる作業計画を更新するものである。
つまりデータ・インタフェース部11は、作業員2a~2cやロボット3a~3cから、作業に係るデータを予め指定した時間間隔で取得する。
つまり、作業リソース処理装置14は、作業に要するリソースの配置を計算する作業リソース処理部として機能する。
作業属性には、作業目的、作業難易度(リスク度)、作業緊急度、作業チーム体制、作業員熟練度、勤務体系などがある。
作業結果には、作業成否、作業時間(遅延程度含む)、被ばく量や累積線量、リスク事象発生有無、計画更新有無などがある。
作業状態処理装置12は、作業員状態測定部121と、ロボット状態測定部122と、作業状態分析評価部123と、作業属性分析評価部124とを含んで構成される。
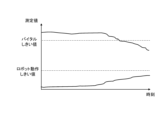
グラフの実線は、加速度を示している。グラフの破線は、心拍数を示している。グラフの一点鎖線は、発汗量を示している。
グラフの実線は、関節1の動作を示している。グラフの破線は、関節2の動作を示している。グラフの一点鎖線は、累積線量を示している。
各個人の体調によるばらつきは、各個人の長期間のデータの標準値よりもずれた場合と定義する。そして、ロボット動作分析データのばらつきは、各ロボットの長時間のデータの標準値よりもずれた場合と定義する。
作業管理データベース13は、作業員状態記録管理部131と、ロボット状態記録管理部132と、作業状態記録管理部133と、作業属性記録管理部134と、作業結果記録管理部135とを含んで構成される。作業管理データベース13は、図3から図5に示す現場データや分析データ、その処理条件などの付帯データを保存する。
ロボット状態記録管理部132は、ロボット状態測定部122が測定したロボット3a~3cの作業ログデータや定期検査データを格納する。
作業属性記録管理部134は、作業の属性状態を記録管理する。
作業結果記録管理部135は、作業の結果を記録管理する。
作業管理データベース13は、年月日欄と、時刻欄と、作業員状態欄と、ロボット状態欄と、作業属性欄と、作業状態欄と、作業付帯情報欄とを含んで構成される。作業員状態欄は、心拍数欄と、加速度欄などを含んで構成される。ロボット状態欄とは、関節角度欄を含んで構成される。
作業リソース処理装置14は、作業リソース配置計算部141と、作業リソース配置更新部142とを含んで構成される。作業リソース処理装置14は、分析データと履歴データに基づいて、作業リソースを計算する。
作業指示操作装置15は、作業員手順指示部151と、ロボット制御操作部152とを含んで構成される。
最初、作業員2a~2cは、ロボット3a~3cを操作して作業を実施する(ステップS10)。
作業リソース処理装置14は、計画更新が必要であるならば(Yes)、図10BのステップS20に進み、計画更新が必要でないならば(No)、ステップS14の処理に進む。
次に作業リソース処理装置14は、該当する作業リソースの計算が完了したか否かを判定する(ステップS23)。
この作業リソース割り当て計算処理は、過去類似作業を探索・抽出:機械学習アルゴリズムや数理モデルなどの統計的手法を用いて過去の類似作業をランキングし、ランキング値の高い類似作業とその作業効率を抽出する方法である。この作業リソース割り当て計算処理は、図10Bに示したステップS22の処理に該当する。

第3状態は、例えばレイアウト相違が多数有る状態や、高線量の状態である。このとき、関数f(a)の値は、0.3である。
第2属性は、例えば作業計画時の作業状態や類似作業時の作業属性である。このとき関数f(b)の値は、1.0である。
第3状態は、例えば基準に対する高難易度作業や低熟練度作業員、低操作性ロボットの属性や、ヒューマンエラー多発時間帯の属性である。このとき関数f(b)の値は、0.3である。
しかし、作業3-1を作業員Aが実施している最中に、作業者Aの状態異常または予兆を検出した。これにより作業計画更新システム1は、作業リソース割り当てを更新する。
図17は、第2の実施形態に係る作業計画更新システム1Aの構成図である。
第2の実施形態の作業計画更新システム1Aは、図1に示した作業計画更新システム1と同様な構成に加えて更に、作業工程管理装置16を含んで構成される。そして、作業計画更新システム1Aが取り扱う対象は、複数の作業であることが明示されている。
最初、作業員2a~2cは、ロボット3a~3cを操作して作業を実施する(ステップS40)。
次に作業状態処理装置12は、作業管理データベース13に作業状態を記録して管理する(ステップS42)。そして、作業リソース処理装置14は、計画更新が必要であるか否かを判定する(ステップS43)。ここで作業リソース処理装置14は、作業状態処理装置12で測定したデータやこれを分析したデータが予め指定したしきい値を超えるとき、計画更新が必要であると判定する。
そして作業リソース処理装置14は、作業リソースの割り当てを計算する(ステップS52)。ここで作業リソースの割り当てとは、作業に要するリソースの配置のことである。ステップS52にて、作業リソース処理装置14は、各作業項目における作業効率が所定値を超えたロボットをリソースとして抽出する。なお、作業リソース処理装置14は、作業連続性が所定値を超える複数の作業にて各作業項目における作業効率が所定値を超えたロボットをリソースとして抽出してもよい。ステップS52にて、作業リソース処理装置14は、この作業に要するリソースによる作業効率のばらつきを含んだ全体効率を計算し、予め指定した閾値を満足するように、この作業に要するリソースの配置を計算する、
過去の作業A-1にて、作業員AはロボットAを操作している。作業員Aの熟練度は「低」であり、ロボットAの操作性は「普通」である。
最初、作業員2a~2cは、ロボット3a~3cを操作して作業を実施する(ステップS60)。
そして、作業状態処理装置12は、定期的に作業管理データベース13に作業状態を記録して管理する(ステップS62)。そして、作業リソース処理装置14は、計画更新が必要であるか否かを判定する(ステップS63)。ここで作業リソース処理装置14は、作業状態処理装置12で測定したデータやこれを分析したデータが予め指定したしきい値を超えるとき、計画更新が必要であると判定する。計画更新が必要な具体例については、後記する図21と図22で説明する。
作業リソース処理装置14は、計画更新が必要であるならば(Yes)、図20BのステップS70に進み、計画更新が必要でないならば(No)、ステップS64の処理に進む。
ロボット状態測定部122は、ばらつきによる分散値σを測定値に付与する。ここで各グラフの線に付与された矢印は、ばらつきによる分散値σに所定係数を掛けたものである。
図23は、第3の実施形態に係る作業計画更新システム1Bの構成図である。
第3の実施形態の作業計画更新システム1Bは、図1に示した作業計画更新システム1の作業管理データベース13とは異なる作業管理データベース13Bを有している。作業指示操作装置15は、作業リソース更新結果や作業員操作指示データ、作業ロボット制御データを作業管理データベース13Bに蓄積する。
作業管理データベース13Bは、図6に示す作業管理データベース13と同様の構成に加えて、作業リソース配置記録管理部136と、作業員手順記録管理部137と、ロボット制御記録管理部138とを含んで構成される。
これら情報を管理することで、過去の作業計画更新の知見をより多く蓄えて、より好適な過去類似作業を提示することができ、作業に対して適切な作業リソースを割り当てることができる。
本発明は上記した実施形態に限定されるものではなく、様々な変形例が含まれる。例えば上記した実施形態は、本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。ある実施形態の構成の一部を他の実施形態の構成に置き換えることが可能であり、ある実施形態の構成に他の実施形態の構成を加えることも可能である。また、各実施形態の構成の一部について、他の構成の追加・削除・置換をすることも可能である。
11 データ・インタフェース部
12 作業状態処理装置 (作業状態処理部)
121 作業員状態測定部
122 ロボット状態測定部
123 作業状態分析評価部
124 作業属性分析評価部
13,13B 作業管理データベース
131 作業員状態記録管理部
132 ロボット状態記録管理部
133 作業状態記録管理部
134 作業属性記録管理部
135 作業結果記録管理部
136 作業リソース配置記録管理部
137 作業員手順記録管理部
138 ロボット制御記録管理部
14 作業リソース処理装置 (作業リソース処理部)
141 作業リソース配置計算部
142 作業リソース配置更新部
15 作業指示操作装置 (作業指示操作部)
151 作業員手順指示部
152 ロボット制御操作部
16 作業工程管理装置 (作業工程管理部)
2a~2c 作業員
3a~3c ロボット
4 作業付帯情報
5 作業属性情報
Claims (12)
- 作業員およびロボットから、作業計画に含まれる各作業に係るデータを予め指定した時間間隔で取得するデータ・インタフェース部と、
前記データから前記作業員のバイタルまたは前記ロボットの動作を分析する作業状態処理部と、
前記データ・インタフェース部で取得したデータまたは前記作業状態処理部が当該データを分析したデータから状態異常を検知した際に、それ以降の前記作業計画の作業に要するリソースである作業員およびロボットの当該作業に対する配置を更新する作業リソース処理部と、
を備え、
前記作業リソース処理部は、前記データから状態異常を検知した以降の前記作業計画の各前記作業と類似し、かつデータベースに格納されている他の作業における手動時と自動時との作業効率を比較して、前記他の作業における手動時の作業効率が高いならば、各前記作業を手動で実施する作業分類を指定し、前記他の作業における自動時の作業効率が高いならば、各前記作業を自動で実施する作業分類を指定することにより作業計画を更新する、
ことを特徴とする作業計画更新システム。 - 前記作業リソース処理部は、前記作業の手動時と自動時との作業効率を、選択した動作モードでの作業時間を手動時の作業時間で除算して算出する、
ことを特徴とする請求項1に記載の作業計画更新システム。 - 前記作業リソース処理部は更に、前記作業の手動時と自動時との作業効率を、選択した動作モードでの作業時間を手動時の作業時間で除算して算出し、当該作業効率に作業状態の線量が高いほど小さくなる作業状態係数を掛ける、
ことを特徴とする請求項2に記載の作業計画更新システム。 - 前記作業リソース処理部は更に、前記作業の手動時と自動時との作業効率を、選択した動作モードでの作業時間を手動時の作業時間で除算して算出し、当該作業効率に作業状態のレイアウト情報が高精度であるほど大きくなる作業状態係数を掛ける、
ことを特徴とする請求項2に記載の作業計画更新システム。 - 前記作業リソース処理部は更に、前記作業の手動時と自動時との作業効率を、選択した動作モードでの作業時間を手動時の作業時間で除算して算出し、当該作業効率に当該作業の難易度が高いほど小さくなる作業属性係数を掛ける、
ことを特徴とする請求項2に記載の作業計画更新システム。 - 前記作業リソース処理部は更に、前記作業の手動時と自動時との作業効率を、選択した動作モードでの作業時間を手動時の作業時間で除算して算出し、当該作業効率に当該作業に従事する作業員の熟練度が高いほど大きくなる作業属性係数を掛ける、
ことを特徴とする請求項2に記載の作業計画更新システム。 - 前記作業リソース処理部は更に、前記作業の手動時と自動時との作業効率を、選択した動作モードでの作業時間を手動時の作業時間で除算して算出し、当該作業効率に当該作業にて使われるロボットの操作性が高いほど大きくなる作業属性係数を掛ける、
ことを特徴とする請求項2に記載の作業計画更新システム。 - 前記作業リソース処理部は、前記作業の手動時と自動時との作業効率を算出する際に、機械学習アルゴリズムまたは数理モデルの統計的手法を用いて当該作業に類似する過去の類似作業をランキングし、ランキング値の高い類似作業とその作業効率を抽出して、前記作業計画の各作業に要するリソースである作業員または/およびロボットの各前記作業に対する配置を更新する、
ことを特徴とする請求項2に記載の作業計画更新システム。 - 前記作業リソース処理部は、前記作業に要するリソースによる長期間の作業に関する作業効率のデータが標準値からずれたばらつきを算出して、前記ばらつきを含んだ前記作業計画の全体効率を計算し、当該全体効率が予め指定した閾値を満足するように前記作業に要するリソースの配置を更新する、
ことを特徴とする請求項8に記載の作業計画更新システム。 - 前記作業リソース処理部は、前記作業に要するリソースの配置を計算する際に、前記作業に類似する過去の類似作業を、統計的手法を用いてランキングし、ランキングの高い類似作業から前記作業の作業効率を抽出し、各作業項目における作業効率が所定値を超えたロボットを前記リソースとして抽出し、当該ロボットを前記作業のリソースとして配置する、
ことを特徴とする請求項1に記載の作業計画更新システム。 - 前記作業リソース処理部は、前記作業に要するリソースの配置を計算する際に、連続して実施した場合の作業効率が所定値を超える複数の作業の作業効率を向上させて算出し、各作業項目における作業効率が所定値を超えたロボットを前記リソースとして抽出する、
ことを特徴とする請求項10に記載の作業計画更新システム。 - 作業計画更新システムに設けられたデータ・インタフェース部が、作業員およびロボットから、作業計画に含まれる各作業に係るデータを予め指定した時間間隔で取得するステップと、
前記作業計画更新システムに設けられた作業状態処理部が、前記データから前記作業員のバイタルまたは前記ロボットの動作を分析するステップと、
前記作業計画更新システムに設けられた作業リソース処理部が、前記データ・インタフェース部で取得したデータまたは前記作業状態処理部が当該データを分析したデータから状態異常を検知した際に、それ以降の前記作業計画の作業に要するリソースである作業員およびロボットの当該作業に対する配置を更新するステップと、
を実行し、
前記作業リソース処理部は、前記データから状態異常を検知した以降の前記作業計画の各前記作業と類似し、かつデータベースに格納されている他の作業における手動時と自動時との作業効率を比較して、前記他の作業における手動時の作業効率が高いならば、各前記作業を手動で実施する作業分類を指定し、前記他の作業における自動時の作業効率が高いならば、各前記作業を自動で実施する作業分類を指定することにより作業計画を更新する、
ことを特徴とする作業計画更新方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021177604A JP7684191B2 (ja) | 2021-10-29 | 2021-10-29 | 作業計画更新システム、および、作業計画更新方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021177604A JP7684191B2 (ja) | 2021-10-29 | 2021-10-29 | 作業計画更新システム、および、作業計画更新方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023066802A JP2023066802A (ja) | 2023-05-16 |
| JP7684191B2 true JP7684191B2 (ja) | 2025-05-27 |
Family
ID=86326203
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021177604A Active JP7684191B2 (ja) | 2021-10-29 | 2021-10-29 | 作業計画更新システム、および、作業計画更新方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7684191B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025014719A (ja) * | 2023-07-19 | 2025-01-30 | トヨタ自動車株式会社 | シミュレーションシステム及びシミュレーションプログラム |
| JP2025049243A (ja) * | 2023-09-21 | 2025-04-03 | ソフトバンクグループ株式会社 | システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019161366A (ja) | 2018-03-09 | 2019-09-19 | 三菱重工業株式会社 | バイタルデータを用いて作業者の状態判定を行うための装置、方法、およびプログラム |
| JP2021117538A (ja) | 2020-01-22 | 2021-08-10 | 株式会社日立製作所 | 工場管理装置、工場管理方法、及び工場管理プログラム |
| JP2021160070A (ja) | 2020-04-03 | 2021-10-11 | Telexistence株式会社 | ロボット管理装置及びロボット管理方法 |
-
2021
- 2021-10-29 JP JP2021177604A patent/JP7684191B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019161366A (ja) | 2018-03-09 | 2019-09-19 | 三菱重工業株式会社 | バイタルデータを用いて作業者の状態判定を行うための装置、方法、およびプログラム |
| JP2021117538A (ja) | 2020-01-22 | 2021-08-10 | 株式会社日立製作所 | 工場管理装置、工場管理方法、及び工場管理プログラム |
| JP2021160070A (ja) | 2020-04-03 | 2021-10-11 | Telexistence株式会社 | ロボット管理装置及びロボット管理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023066802A (ja) | 2023-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7341073B2 (ja) | 工場管理装置、工場管理方法、及び工場管理プログラム | |
| US11839496B2 (en) | Monitors for movements of workers | |
| JP7684191B2 (ja) | 作業計画更新システム、および、作業計画更新方法 | |
| US10963325B2 (en) | Determining the health of a storage drive | |
| US20150379453A1 (en) | System and method for evaluating employees and job seekers at an organization | |
| CN110782045A (zh) | 一种运维告警系统动态阈值的生成方法及装置 | |
| JP2019021051A (ja) | 情報処理装置、方法及びプログラム | |
| JP2004165216A (ja) | 生産管理方法および生産管理装置 | |
| US11068827B1 (en) | Master performance indicator | |
| US10460403B2 (en) | System and method to reduce human activity damage-induced power outage | |
| US20150242782A1 (en) | Interactive Planning Method And Tool | |
| JP7777936B2 (ja) | 作業状況分析システム及び作業状況分析方法 | |
| US12109015B1 (en) | Apparatus and method for monitoring performance of a physical activity | |
| US20150024358A1 (en) | Stress assessment device, stress assessment method and recording medium | |
| JP7165108B2 (ja) | 作業訓練システム及び作業訓練支援方法 | |
| JP7645168B2 (ja) | 作業員組合せ計算装置、作業チーム管理システム、および、作業員組合せ計算方法 | |
| CN120892907A (zh) | 基于传感器的冷链设备故障检测方法及系统 | |
| WO2022219810A1 (ja) | 情報提示装置、情報提示方法、及びプログラム | |
| US20250217730A1 (en) | Systems and methods for personalized ranked alerts | |
| JP7412592B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| US20160225282A1 (en) | Individualized needs evaluation and expertise development system for electronic medical record users | |
| Pilliang et al. | Criticism of the risk management process in scrum methodology | |
| GB2605266A (en) | Systems and methods for assigning exams to physicians | |
| Gandhare et al. | Integrating Quantitative Parameters for Automating Medical Equipment Maintenance Using Industry 4.0 and FMEA | |
| US20230333544A1 (en) | System and method for planning integrated vehicle production |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20241129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241217 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250515 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7684191 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |