以下、本発明を具体化した実施形態を図面に基づいて説明する。
図1~図8を参照して、一実施形態による海底構造物検出システム100の構成について説明する。
(海底構造物検出装置の構成)
まず、図1を参照して、一実施形態による海底構造物検出システム100の構成について説明する。
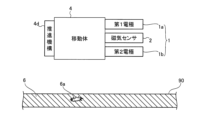
海底構造物検出システム100は、海底80に設けられた金属製の海底構造物90を検出する海底構造物検出システムである。海底構造物90は、海底80に設けられたパイプラインである。すなわち、海底構造物検出システム100は、海底80に設けられたパイプラインの有無を検出するように構成されている。また、海底構造物検出システム100は、海底構造物90に設けられ、海底構造物90を構成する金属とはイオン化傾向が異なる金属によって形成された防食層6の損傷6aの有無を検知する海底構造物検出システムである。すなわち、海底構造物検出システム100は、海底80に設けられたパイプラインの損傷の有無を検出するように構成されている。なお、海底構造物90は、たとえば、鋼材(鉄材)により形成される。
パイプラインは、たとえば、錆びを防ぐための防食層6が外表面を覆うように設けられた鋼管を含む。防食層6は、たとえば、亜鉛合金によって形成される。防食層6に損傷6aが生じた場合、矢印7に示すように、海底構造物90を構成する金属と防食層6とのイオン化傾向の違いにより、損傷6aが生じた部分から防食層6に対して海水を介して電流が流れる。なお、パイプラインは、特許請求の範囲の「海底構造物」の一例である。図1に示す例では、便宜的に、海底構造物90に設けられた防食層6に対して、ハッチングを付している。
図1に示すように、海底構造物検出システム100は、電位差センサ1と、磁気センサ2と、コンピュータ3とを備える。また、本実施形態では、海底構造物検出システム100は、移動体4を備える。電位差センサ1と、磁気センサ2とは、移動体4に設けられている。また、コンピュータ3は、船舶5に設けられている。
電位差センサ1は、海底構造物90と防食層6との間に流れる電流に起因する電位差を検知するように構成されている。電位差センサ1は、海底構造物90と防食層6との間の海中に流れる電流に起因する電位差に基づく電界信号30(図2参照)を出力するように構成されている。本実施形態では、電位差センサ1は、移動体4によって移動されながら測定した電界信号30を出力するように構成されている。電位差センサ1は、たとえば、銀/塩化銀電極を含む。電位差センサ1が移動体4に設けられる位置などについては、後述する。
磁気センサ2は、海中の磁気を検知するように構成されている。また、磁気センサ2は、海中の磁気に基づく磁気信号31(図2参照)を出力するように構成されている。磁気センサ2は、移動体4に設けられている。本実施形態では、磁気センサ2は、移動体4によって移動されながら測定した磁気信号31を出力するように構成されている。磁気センサ2は、移動体4における上下方向と、上下方向と直交する平面内において互いに直交する2方向との磁気信号31を出力するように構成されている。磁気センサ2は、たとえば、3軸の磁気計を含む。
コンピュータ3は、磁気センサ2から出力される磁気信号31に基づいて、海底構造物90の検出を行うように構成されている。また、コンピュータ3は、磁気信号31、および、電位差センサ1から出力される電界信号30に基づいて、防食層6の損傷6aの有無を検出するように構成されている。本実施形態では、防食層6の損傷6aは、たとえば、防食層6の腐食である。すなわち、本実施形態では、コンピュータ3は、防食層6の腐食の有無を検知するように構成されている。コンピュータ3は、防食層6が腐食することにより、海底構造物90の表面が露出し、海底構造物90と防食層6との間に電流(腐食電流)が流れるか否かを検知することにより、防食層6の損傷6aの有無を検知する。また、コンピュータ3は、移動体4を移動させる制御を行うように構成されている。コンピュータ3が海底構造物90の有無を検出する構成、および、防食層6の損傷6aの有無を検出する構成の詳細については、後述する。
移動体4は、磁気センサ2および電位差センサ1が設けられ、水中を移動可能なように構成されている。本実施形態では、移動体4は、電位差センサ1および磁気センサ2の両方を、一体的に移動させるように構成されている。また、移動体4には、海中における移動体4の深さ情報を取得する深度計(図示せず)、および、移動体4から測定対象までの距離を取得する距離センサ(図示せず)が設けられている。移動体4は、海中を走行可能に構成されている。また、移動体4は、無人で海中を移動可能に構成されている。移動体4は、いわゆるAUV(Autonomous Underwater Vehicle:自律型無人潜水機)である。移動体4の詳細な構成については、後述する。
図2に示すように、コンピュータ3は、プロセッサ10と、記憶部11と、移動体情報取得部12と、信号取得部13と、報知部14とを備える。
プロセッサ10は、海底構造物90(図1参照)の有無を検知するように構成されている。また、プロセッサ10は、海底構造物90に設けられた防食層6(図1参照)の損傷6a(図1参照)の有無を検知するように構成されている。プロセッサ10は、たとえば、CPU(Central Processing Unit)、マイクロプロセッサ、海底構造物90の位置判定用に構成されたFPGA(Field-Programmable Gate Array)などを含む。プロセッサ10が海底構造物90の有無を検知する構成、および、防食層6の損傷6aの有無を検知する構成の詳細については、後述する。
記憶部11は、予め取得された基準磁気信号20を記憶する。また、記憶部11は、基準磁気信号20を取得した際の磁気センサ2と海底構造物90との間の距離である基準距離21を記憶するように構成されている。また、記憶部11は、プロセッサ10が実行する各種プログラムを記憶する。記憶部11は、不揮発性記憶装置を含む。不揮発性記憶装置は、たとえば、ハードディスクドライブ、ソリッドステートドライブなどである。
基準磁気信号20は、移動体4と海底構造物90との間の距離が基準距離21となる位置において磁気センサ2によって出力された磁気信号である。基準距離21は、基準磁気信号20を取得する際の移動体4と海底構造物90との間の距離である。基準磁気信号20および基準距離21は、予め取得され、記憶部11に記憶されている。なお、基準磁気信号20は、海底構造物90の有無の検知、および、防食層6の損傷6aの有無の検知に用いられる。また、基準磁気信号20および基準距離21は、海底構造物90がある場合において、海底構造物90の深さ位置25(図6参照)の取得に用いられる。なお、基準距離21は、防食層6の損傷6aの有無の検知には用いられない。
移動体情報取得部12は、移動体4の加速度および姿勢の情報を含む移動体情報22を取得するように構成されている。また、移動体情報取得部12は、取得した移動体情報22を、プロセッサ10に対して出力するように構成されている。移動体情報取得部12は、たとえば、無線通信装置および入出力インタフェースを含む。
信号取得部13は、移動体4に設けられた電位差センサ1から、電界信号30を取得するように構成されている。また、信号取得部13は、磁気センサ2から、磁気信号31を取得するように構成されている。また、信号取得部13は、取得した電界信号30および磁気信号31を、プロセッサ10に対して出力するように構成されている。信号取得部13は、たとえば、無線通信装置および入出力インタフェースを含む。
報知部14は、海底構造物検知部10aの有無の検知結果である第1検知結果40a(図5参照)を報知するように構成されている。また、報知部14は、防食層6の損傷6aの有無の検知結果である第2検知結果40b(図5参照)を報知するように構成されている。報知部14は、たとえば液晶表示装置である。報知部14は、エレクトロルミネッセンス表示装置、プロジェクタであってもよい。
移動体4は、制御部4aと、通信部4bと、移動体情報計測部4cと、推進機構4dとを含む。
制御部4aは、移動体4を制御するように構成されている。制御部4aは、たとえば、CPUを含む。
通信部4bは、制御部4aの制御の下、コンピュータ3と通信するように構成されている。具体的には、通信部4bは、コンピュータ3から、移動体4を移動させる方向の情報を受信したり、コンピュータ3に対して、電位差センサ1が出力する電界信号30、磁気センサ2が出力する磁気信号31、および、移動体情報22を送信したりするように構成されている。通信部4bは、たとえば、無線接続可能な送受信装置を含む。
移動体情報計測部4cは、移動体4の加速度および姿勢の情報を取得するように構成されている。姿勢の情報は、海中における移動体4の姿勢を表したベクトルである。移動体情報計測部4cは、たとえば、移動体4の上下方向、上下方向に直交する平面内において、互いに直交する2方向の3軸方向の加速度センサを含む。
推進機構4dは、制御部4aの制御の下、移動体4に対して推進力を与えるように構成されている。推進機構4dは、プロペラ(図示せず)と、プロペラを駆動する駆動源(図示せず)とを含む。推進機構4dは、プロペラを回転させることによって水をかき推進力を得る、いわゆるスクリュー構成であってもよいし、後方に高圧の水流を噴出することにより推進力を得る、いわゆるウォータージェット推進機構であってもよい。
〈電位差センサおよび磁気センサの配置〉
次に、図3を参照して、移動体4における電位差センサ1および磁気センサ2の配置について説明する。
図3に示すように、電位差センサ1は、一対の電極を含む。具体的には、電位差センサ1は、一対の電極として、第1電極1aおよび第2電極1bを含む。電位差センサ1は、第1電極1aと第2電極1bとの間の電位差を検出するように構成されている。
また、一対の電位差センサ1(第1電極1aおよび第2電極1b)は、移動体4において、所定の間隔で上下方向に並ぶように設けられている。磁気センサ2は、一対の電極の間の位置に設けられている。すなわち、第1電極1aおよび第2電極1bと、磁気センサ2とは、所定の間隔で上下方向に並ぶように設けられている。言い換えると、第1電極1aおよび第2電極1bと、磁気センサ2とは、移動体4の進行方向における位置が、略等しくなるように移動体4に設けられている。
〈基準磁気信号の取得〉
次に、図4を参照して、海底構造物検出システム100(図1参照)が、基準磁気信号20(図2参照)を取得する構成について説明する。
海底構造物検出システム100は、たとえば、海底構造物90を敷設した際に、基準磁気信号20を取得するように構成されている。具体的には、海底構造物検出システム100は、海底構造物90から発せられる磁気を、移動体4を移動させながら検出することにより、基準磁気信号20を取得する。この際、移動体4に設けられた距離センサによって取得した距離を、基準距離21として基準磁気信号20とともに記憶部11(図2参照)に記憶する。
また、海底構造物検出システム100は、海底構造物90が敷設された後において、海底構造物90の防食層6に損傷6a(図1参照)が生じる前に、基準磁気信号20を取得する。
〈海底構造物の検知および防食層の損傷の検知〉
次に、図5を参照して、プロセッサ10が海底構造物90(図1参照)の有無を検知する構成、および、防食層6(図1参照)の損傷6a(図1参照)の有無を検知する構成について説明する。
図5に示すように、プロセッサ10は、海底構造物検知部10a、損傷検知部10b、および、信号補正部10cを機能ブロックとして備える。言い換えると、プロセッサ10は、記憶部11に記憶されたプロブラムを実行することにより、海底構造物検知部10a、損傷検知部10b、および、信号補正部10cとして機能する。
本実施形態では、海底構造物検出システム100は、移動体4(図1参照)を移動させながら電界信号30および磁気信号31を取得する。したがって、移動体4の姿勢によって、電界信号30および磁気信号31に変化が生じる場合がある。そこで、本実施形態では、信号補正部10cは、移動体情報22に基づいて、磁気信号31および電界信号30に対して移動体4の姿勢の補正を行うように構成されている。具体的には、信号補正部10cは、移動体情報取得部12から移動体情報22を取得することにより、移動体4の加速度および姿勢の情報を取得する。そして、信号補正部10cは、取得した移動体4の加速度および姿勢の情報を用いて、電界信号30に対してフィルタ処理および直交度補正処理を行うことにより、補正電界信号30aを取得する。すなわち、信号補正部10cは、電界信号30に対して補正処理を行うことにより、電位差センサ1の座標系から、水平および鉛直方向の絶対座標系に座標変換を行う。これにより、信号補正部10cは、鉛直方向、水平面内において互いに直交する2方向の補正電界信号30aを取得することができる。
また、信号補正部10cは、取得した移動体4の加速度および姿勢の情報を用いて、磁気信号31に対してフィルタ処理および直交度補正処理を行うことにより、補正磁気信号31aを取得する。すなわち、信号補正部10cは、磁気信号31に対して補正処理を行うことにより、磁気センサ2の座標系から、水平および鉛直方向の絶対座標系に座標変換を行う。これにより、信号補正部10cは、鉛直方向、水平面内において互いに直交する2方向の補正磁気信号31aを取得することができる。信号補正部10cは、補正電界信号30aを、損傷検知部10bに対して出力する。また、信号補正部10cは、補正磁気信号31aを、海底構造物検知部10aおよび損傷検知部10bに対して出力する。
海底構造物検知部10aは、磁気センサ2によって出力された磁気信号31に基づいて、海底構造物90の有無を検知するように構成されている。本実施形態では、海底構造物検知部10aは、信号補正部10cによって姿勢の補正が行われた後の磁気信号31である補正磁気信号31aに基づいて、海底構造物90の有無を検知するように構成されている。
海底構造物検知部10aは、信号補正部10cによって取得された補正磁気信号31aを取得する。海底構造物検知部10aは、補正磁気信号31aの振幅51(図7(B)参照)に基づいて、海底構造物90(図1参照)の有無を判別する。具体的には、海底構造物検知部10aは、補正磁気信号31aの振幅51が、所定の大きさ以上である場合に、海底構造物90があると判別する。また、海底構造物検知部10aは、補正磁気信号31aの振幅51が、所定の大きさよりも小さい場合に、海底構造物90がないと判別する。
また、海底構造物検知部10aは、海底構造物90があると判別した場合には、基準磁気信号20と磁気信号31とに基づいて、海底構造物90の深さ位置25(図6参照)を取得する。本実施形態では、海底構造物検知部10aは、記憶部11から、基準磁気信号20および基準距離21を取得する。海底構造物検知部10aは、基準磁気信号20と、基準距離21と、補正磁気信号31aと、を用いて、海底構造物90の深さ位置25を取得する。
〈海底構造物の深さ位置の検知〉
次に、図6を参照して、海底構造物検知部10a(図2参照)が海底構造物90の深さ位置25を取得する構成について説明する。本実施形態では、海底構造物検知部10aは、磁気信号31(図2参照)の大きさに基づいて、海底構造物90の深さ位置25を検知するように構成されている。具体的には海底構造物検知部10aは、基準磁気信号20(図2参照)の波形の振幅50(図7(A)参照)と、基準距離21(図2参照)と、磁気信号31の振幅51(図7(B)参照)とに基づいて、海底構造物90の深さ位置25を検出するように構成されている。
ここで、磁気信号31の大きさは、海底構造物90と移動体4との間の距離の三乗に反比例することが知られている。したがって、基準距離21の振幅50と、磁気信号31の振幅51とを比較することにより、基準距離21と海底構造物90と移動体4との間の距離23の比率を取得することが可能となるので、海底構造物90と移動体4との間の距離23を取得することができる。
また、海底構造物検知部10a(図2参照)は、移動体4に設けられた深度計に基づいて、海面81から移動体4までの距離24を取得する。そして、海底構造物検知部10aは、海底構造物90と移動体4との間の距離23、および、海面81から移動体4までの距離24を加算することにより、海底構造物90の深さ位置25を取得する。すなわち、海底構造物90の深さ位置25とは、海面81から海底構造物90までの距離である。
再び図5を参照して、海底構造物検知部10aは、海底構造物90の有無の検知結果である第1検知結果40aを、報知部14に対して出力する。本実施形態では、海底構造物検知部10aは、海底構造物90があると判定した場合には、海底構造物90が検知された旨のメッセージを、第1検知結果40aとして報知部14に対して出力する。また、海底構造物検知部10aは、海底構造物90がないと判定した場合には、海底構造物90が検知されなかった旨のメッセージを、第1検知結果40aとして報知部14に対して出力する。なお、海底構造物90がある場合には、海底構造物検知部10aは、第1検知結果40aとして、海底構造物90の深さ位置25も出力する。
損傷検知部10bは、磁気信号31と電位差センサ1によって出力された電界信号30とに基づいて、防食層6(図1参照)の損傷6a(図1参照)の有無を検知するように構成されている。
損傷検知部10bは、海底構造物90のうちの防食層6の損傷6aが生じた箇所と防食層6との間に流れる電流に起因する磁気成分と、電界信号30に含まれる電流の成分とに基づいて、防食層6の損傷6aの有無を検知するように構成されている。具体的には、損傷検知部10bは、基準磁気信号20と磁気信号31とに基づいて、電流に起因する磁気成分を取得するように構成されている。本実施形態では、損傷検知部10bは、信号補正部10cによって取得された補正電界信号30aおよび補正磁気信号31aを取得する。損傷検知部10bは、補正磁気信号31aと、信号補正部10cによって姿勢の補正が行われた後の電界信号30である補正電界信号30aとに基づいて、防食層6の損傷6aの有無を検知するように構成されている。
損傷検知部10bは、海底構造物検知部10aによって海底構造物90があると判別された場合に、海底構造物90に設けられた防食層6において、損傷6aがあるか否かを判別する。具体的には、損傷検知部10bは、信号補正部10cによって出力された補正電界信号30aと、信号補正部10cによって出力された補正磁気信号31aと、記憶部11に記憶された基準磁気信号20とに基づいて、損傷6aの有無を検出する。
本実施形態では、防食層6は、海底構造物90を構成する金属とは異なるイオン化傾向の金属で形成されている。したがって、防食層6に損傷6aがある場合、イオン化傾向の違いに基づいて、矢印7(図1参照)に示すように、損傷6aから防食層6に対して電流が流れる。この場合、損傷6aから防食層6に流れる電流に起因して、磁気が生じる。磁気センサ2(図1参照)は、損傷6aから防食層6に流れる電流に起因して生じた磁気を含む磁気信号31を出力する。
ここで、磁気信号31には、損傷6aから防食層6に流れる電流に起因して生じた磁気成分以外に、地磁気の成分などに起因するノイズを含む。ノイズを含んだ状態では、損傷6aから防食層6に流れる電流に起因して生じた磁気の判別が困難である。そこで、本実施形態では、損傷検知部10bは、磁気信号31から基準磁気信号20を差分して得られる信号である差分磁気信号32(図7(C)参照)に基づいて、防食層6の損傷6aの有無を検知するように構成されている。損傷検知部10bは、補正磁気信号31aと基準磁気信号20との差分である差分磁気信号32を取得する。
本実施形態では、損傷検知部10bは、差分磁気信号32の第1ピーク60(図7(C)参照)と、電界信号30の第2ピーク62(図8(B)参照)とに基づいて、防食層6の損傷6aの有無を検知するように構成されている。具体的には、損傷検知部10bは、差分磁気信号32において、損傷6aから防食層6に流れる電流に起因して生じた磁気に基づく第1ピーク60が含まれるか否かに基づいて、損傷6aがあるか否かを判別する。
また、本実施形態では、損傷検知部10bは、第1ピーク60の取得位置である第1取得位置61(図7(C)参照)と、第2ピーク62の取得位置である第2取得位置63(図8(B)参照)とに基づいて、防食層6の損傷6aの位置を検知するように構成されている。具体的には、損傷検知部10bは、損傷6aの検知を開始した時間と、第1ピーク60が取得された際の移動体4の移動距離とに基づいて、第1取得位置61を取得する。また、損傷検知部10bは、損傷6aの検知を開始した時間と、第2ピーク62が取得された際の移動体4の移動距離とに基づいて、第2取得位置63を取得する。
損傷検知部10bは、防食層6に損傷6aがある場合には、防食層6に損傷6aがある旨のメッセージを、第2検知結果40bとして取得する。また、損傷検知部10bは、防食層6に損傷6aがある場合には、損傷6aの位置を、第2検知結果40bとして取得する。また、損傷検知部10bは、防食層6に損傷6aがない場合には、防食層6に損傷6aがない旨のメッセージを、第2検知結果40bとして取得する。また、損傷検知部10bは、取得した第2検知結果40bを、報知部14に対して出力する。なお、損傷検知部10bは、海底構造物90がない場合には、防食層6に損傷6aがあるか否かの判別を行わないため、第2検知結果40bを取得しない。すなわち、海底構造物90がない場合には、損傷検知部10bは、第2検知結果40bを報知部14に対して出力しない。
報知部14は、海底構造物検知部10aから入力された第1検知結果40aを表示する。また、報知部14は、損傷検知部10bから第2検知結果40bが入力された場合には、第1検知結果40aとともに、第2検知結果40bを表示する。
〈各信号波形〉
次に、図7および図8を参照して、磁気センサ2が検知する磁気信号31、および、電位差センサ1が検知する電界信号30について説明する。なお、図7に示す例は、概念図であり、実際には、磁気信号31には、地磁気などのノイズを含む。また、図8に示す例も概念図であり、実際には、電界信号30には、周辺環境の電位差のなどのノイズを含む。
図7(A)は、予め取得され、記憶部11(図2参照)に記憶された基準磁気信号20を示すグラフ70である。グラフ70は、縦軸が磁力であり、横軸が移動体4(図1参照)の移動距離である。
グラフ70に示す基準磁気信号20は、基準距離21(図2参照)において磁気センサ2(図1参照)によって検知された磁気の信号である。すなわち、基準磁気信号20には、防食層6(図1参照)に損傷6a(図1参照)がない状態で取得された信号であるため、損傷6aに起因するピークが含まれない。
図7(B)は、磁気センサ2(図1参照)によって出力され、信号補正部10c(図5参照)によって補正された補正磁気信号31aを示すグラフ71である。グラフ71は、縦軸が磁力であり、横軸が移動体4(図1参照)の移動距離である。図7(B)に示す例は、防食層6(図1参照)に損傷6a(図1参照)がある場合の補正磁気信号31aである。したがって、図7(B)に示す補正磁気信号31aは、損傷6aから防食層6に流れる電流に起因する磁気成分である第1ピーク60を含んでいる。なお、第1ピーク60は、正の第1ピーク60a、および、負の第1ピーク60bを含む。正の第1ピーク60aは、損傷6aから防食層6に流れる電流の始点の位置に現れるピークである。また、負の第1ピーク60bは、損傷6aから防食層6に流れる電流の終点の位置に現れるピークである。
図7(C)は、海底構造物検知部10a(図5参照)によって取得される差分磁気信号32を示すグラフ72である。グラフ72は、縦軸が磁力であり、横軸が移動体4(図1参照)の移動距離である。差分磁気信号32は、損傷6a(図1参照)から防食層6(図1参照)に流れる電流に起因する磁気成分である第1ピーク60を含んでいる。また、差分磁気信号32は、補正磁気信号31a(図5参照)から基準磁気信号20を差分した信号であるため、海底構造物90(図1参照)の周囲の地磁気などによるノイズが除去されている。すなわち、差分磁気信号32は、損傷6aから防食層6に流れる電流に起因する磁気成分(第1ピーク60)のSNR(Signal Noise Ratio)が高い信号である。
図8(A)は、防食層6(図1参照)に損傷6a(図1参照)がない場合の電界信号30bを示すグラフ73である。グラフ73は、縦軸が磁力であり、横軸が移動体4(図1参照)の移動距離である。損傷6aがない場合、海底構造物90から電流が流れない。そのため、グラフ73に示す電界信号30bは、ピークを含まない信号となる。
図8(B)は、防食層6(図1参照)に損傷6a(図1参照)がある場合の補正電界信号30aを示している。グラフ74は、縦軸が磁力であり、横軸が移動体4(図1参照)の移動距離である。損傷6aがある場合、損傷6aから防食層6に対して電流が流れる。そのため、電界信号30bには、損傷6aから防食層6に対して流れる電流に起因する第2ピーク62が含まれる。なお、第2ピーク62は、正の第2ピーク62a、および、負の第2ピーク62bを含む。正の第2ピーク62aは、損傷6aから防食層6に流れる電流の始点の位置に現れるピークである。また、負の第2ピーク62bは、損傷6aから防食層6に流れる電流の終点の位置に現れるピークである。
防食層6に損傷6aがある場合、損傷6aから防食層6に対して流れる電流に起因する第1ピーク60(図7(C)参照)が検知されるとともに、第2ピーク62も検知される。電位差センサ1および磁気センサ2は、移動体4(図1参照)によって一体的に移動されるため、第1ピーク60の位置(第1取得位置61(図7(C)参照))および第2ピーク62の位置(第2取得位置63)に基づいて、防食層6の損傷6aの位置を取得することができる。
なお、第1取得位置61は、正の第1ピーク60aに対応する第1取得位置61aと、負の第1ピーク60bに対応する第1取得位置61bとを含む。したがって、損傷検知部10bは、正の第1ピーク60aに対応する第1取得位置61aおよび負の第1ピーク60bに対応する第1取得位置61bを取得することにより、防食層6と損傷6a(海底構造物90の表面)との間に流れる電流の始点および終点を取得することができる。
また、第2取得位置63は、正の第2ピーク62aに対応する第2取得位置63aと、負の第2ピーク62bに対応する第2取得位置63bとを含む。したがって、損傷検知部10bは、正の第2ピーク62aに対応する第2取得位置63aおよび負の第2ピーク62bに対応する第2取得位置63bを取得することにより、防食層6と損傷6a(海底構造物90の表面)との間に流れる電流の始点および終点を取得することができる。
〈海底構造物の検知処理〉
次に、図9を参照して、海底構造物検出システム100が、海底構造物90の有無を検知する処理について説明する。
ステップ101において、海底構造物検知部10a(図5参照)は、磁気センサ2(図1参照)によって出力された磁気信号31(図2参照)を取得する。具体的には、海底構造物検知部10aは、信号補正部10c(図5参照)によって補正された補正磁気信号31a(図5参照)を取得する。
ステップ102において、海底構造物検知部10a(図2参照)は、海底構造物90(図1参照)が検知されたか否かを判定する。具体的には、海底構造物検知部10aは、補正磁気信号31aの振幅51(図7(B)参照)の大きさが、所定の大きさ以上であるか否かに基づいて、海底構造物90が検知されたか否かを判定する。海底構造物90が検知された場合、処理は、ステップ103へ進む。海底構造物90が検知されなかった場合、処理は、ステップ107へ進む。
ステップ103において、海底構造物検知部10aは、海底構造物90が検知された旨のメッセージを、第1検知結果40a(図5参照)として取得する。
ステップ104において、海底構造物検知部10aは、記憶部11(図2参照)に記憶された基準磁気信号20(図2参照)を取得する。
ステップ105において、海底構造物検知部10aは、図6に示すように、海底構造物90の深さ位置25を取得する。
ステップ106において、報知部14(図2参照)は、第1検知結果40aを報知する。具体的には、報知部14は、海底構造物90の深さ位置25および海底構造物90が検知された旨のメッセージを報知する。その後、処理は、終了する。
また、ステップ102からステップ107へ処理が進んだ場合、ステップ107において、海底構造物検知部10aは、海底構造物90が検知されなかった旨のメッセージを、第1検知結果40aとして取得する。
ステップ108において、報知部14は、第1検知結果40aを報知する。具体的には、報知部14は、海底構造物90が検知されなかった旨のメッセージを報知する。その後、処理は、終了する。なお、海底構造物検知部10aは、所定の間隔で、上記ステップ101~ステップ108の処理を繰り返し行う。
次に、図10を参照して、海底構造物検出システム100が、海底構造物90(図1参照)に設けられた防食層6(図1参照)の損傷6a(図1参照)の有無を検知する処理について説明する。なお、図10に示す処理は、図9に示す処理において、海底構造物90があると判別された場合に実行される。すなわち、図10に示す処理を開始する際には、プロセッサ10(図2参照)は、磁気信号31(図2参照)および基準磁気信号20(図2参照)を取得した状態である。
ステップ200において、損傷検知部10b(図5参照)は、差分磁気信号32(図7(C)参照)を取得する。具体的には、損傷検知部10bは、補正磁気信号31a(図2参照)と基準磁気信号20との差分により、差分磁気信号32を取得する。
ステップ201において、損傷検知部10bは、第1ピーク60の位置(第1取得位置61(図7(C)参照))を取得する。具体的には、損傷検知部10bは、第1ピーク60が検知された際の移動体4の移動距離に基づいて、第1取得位置61を取得する。
ステップ202において、損傷検知部10bは、電界信号30(図2参照)を取得する。具体的には、損傷検知部10bは、信号補正部10c(図5参照)によって補正された補正電界信号30a(図5参照)を取得する。
ステップ203において、損傷検知部10bは、第2ピーク62の位置(第2取得位置63(図8(B)参照))を取得する。具体的には、損傷検知部10bは、第2ピーク62が検知された際の移動体4の移動距離に基づいて、第2取得位置63を取得する。なお、ステップ200およびステップ201の処理と、ステップ202およびステップ203の処理とは、どちらが先に行われてもよい。
ステップ204において、損傷検知部10bは、第1ピーク60または第2ピーク62があるか否かを判定する。具体的には、損傷検知部10bは、差分磁気信号32において第1ピーク60が検知されるか否か、または、補正電界信号30aにおいて第2ピーク62が検知されるか否かを判定する。第1ピーク60または第2ピーク62のいずれか一方が検知される場合、処理は、ステップ205へ進む。第1ピーク60および第2ピーク62の両方が検知されない場合、処理は、ステップ208へ進む。
ステップ205において、損傷検知部10bは、ピークに基づいて、防食層6の損傷6aの位置を取得する。なお、第1ピーク60および第2ピーク62の両方が検知される場合には、損傷検知部10bは、第1取得位置61および第2取得位置63に基づいて、防食層6の損傷6aの位置を取得する。また、第1ピーク60および第2ピーク62のいずれか一方のみが検知される場合には、損傷検知部10bは、いずれかのピークの取得位置に基づいて、防食層6の損傷6aの位置を取得する。
ステップ206において、損傷検知部10bは、防食層6の損傷6aが検知された旨のメッセージを、第2検知結果40b(図5参照)として取得する。
ステップ207において、報知部14(図5参照)は、第2検知結果40bを報知する。
ステップ204からステップ208へ処理が進んだ場合、ステップ208において、損傷検知部10bは、防食層6の損傷6aが検知されなかった旨のメッセージを、第2検知結果40bとして取得する。その後、処理は、ステップ207へ進む。
すなわち、ステップ206からステップ207へ処理が進んだ場合、ステップ207において、防食層6の損傷6aが検知された旨のメッセージが、第2検知結果40bとして報知される。また、ステップ208からステップ207へ処理が進んだ場合、ステップ207において、防食層6の損傷6aが検知されなかった旨のメッセージが、第2検知結果40bとして報知される。
(本実施形態の効果)
本実施形態では、以下のような効果を得ることができる。
本実施形態では、上記のように、海底構造物検出システム100は、海底80に設けられた金属製の海底構造物90の検知および海底構造物90に設けられ、海底構造物90とはイオン化傾向が異なる金属によって形成された防食層6の損傷6aの有無を検知する海底構造物検出システムであって、海底構造物90と防食層6との間に流れる電流に起因する電位差を検知する電位差センサ1と、海中の磁気を検知する磁気センサ2と、磁気センサ2によって出力された磁気信号31に基づいて、海底構造物90の有無を検知する海底構造物検知部10aと、磁気信号31と電位差センサ1によって出力された電界信号30とに基づいて、防食層6の損傷6aの有無を検知する損傷検知部10bと、を備える。
これにより、海底構造物検出システム100は、磁気センサ2によって出力された磁気信号31によって海底構造物90の有無の検知する海底構造物検知部10aを備えるので、磁気信号31を取得することによって、海底構造物90の有無を検知することができる。また、海底構造物検出システム100は、磁気センサ2によって出力された磁気信号31、および、海底構造物90と防食層6との間に流れる電流に起因する電位差を検知する電位差センサ1によって出力された電界信号30によって、防食層6の損傷6aの有無を検知する損傷検知部10bを備える。これにより、磁気信号31のみによって防食層6の損傷6aの有無を検知する構成と異なり、海底構造物90と防食層6との間に流れる電流に起因して生じる磁気信号31、および、海底構造物90と防食層6との間に流れる電流に起因する電位差に基づく電界信号30の両方によって、防食層6の損傷6aの有無を検知することができる。したがって、磁気信号31のみによって防食層6の損傷6aの有無を検知する構成と比較して、防食層6の損傷6aの有無を精度よく検知することができる。その結果、海底構造物90の有無を検知可能であるとともに、海底構造物90に設けられた防食層6の損傷6aの有無を精度よく検知することが可能な海底構造物検出システム100を提供することができる。
また、上記実施形態では、以下のように構成したことによって、下記のような更なる効果が得られる。
すなわち、本実施形態では、上記のように、損傷検知部10bは、海底構造物90のうちの防食層6の損傷6aが生じた箇所と防食層6との間に流れる電流に起因する磁気成分と、電界信号30に含まれる電流の成分とに基づいて、防食層6の損傷6aの有無を検知するように構成されている。これにより、損傷検知部10bは、防食層6の損傷6aが生じた箇所と防食層6との間に流れる電流に起因する磁気成分と、電界信号30に含まれる上記電流の成分とに基づいて防食層6の損傷6aの有無を検知するため、磁気信号31および電界信号30のいずれか一方のみを用いて防食層6の損傷6aを検知する構成と比較して、防食層6の損傷6aの検知精度を向上させることができる。
また、本実施形態では、上記のように、予め取得された基準磁気信号20を記憶する記憶部11をさらに備え、損傷検知部10bは、基準磁気信号20と磁気信号31とに基づいて、上記電流に起因する磁気成分を取得するように構成されている。これにより、磁気信号31に地磁気などのノイズが含まれている場合でも、防食層6の損傷6aが生じた箇所と防食層6との間に流れる電流に起因する磁気成分を容易に取得することができる。その結果、地磁気などのノイズに起因して、防食層6の損傷6aの検知精度が低下することを抑制することができる。
また、本実施形態では、上記のように、損傷検知部10bは、磁気信号31から基準磁気信号20を差分して得られる信号である差分磁気信号32の第1ピーク60と、電界信号30の第2ピーク62とに基づいて、防食層6の損傷6aの有無を検知するように構成されている。これにより、差分磁気信号32に第1ピーク60が含まれるか否か、および、電界信号30に第2ピーク62が含まれるか否かによって、防食層6の損傷6aの有無を検知することができる。その結果、防食層6の損傷6aの有無を容易に検知することができる。
また、本実施形態では、上記のように、損傷検知部10bは、第1ピーク60の取得位置である第1取得位置61と、第2ピーク62の取得位置である第2取得位置63とに基づいて、防食層6の損傷6aの位置を検知するように構成されている。これにより、第1取得位置61と第2取得位置63とを取得することにより、防食層6の損傷6aの位置を容易に取得することができる。
また、本実施形態では、上記のように、記憶部11は、基準磁気信号20を取得した際の磁気センサ2と海底構造物90との間の距離である基準距離21を記憶するように構成されており、海底構造物検知部10aは、基準磁気信号20の波形の振幅50と、基準距離21と、磁気信号31の振幅51とに基づいて、海底構造物90の深さ位置25を検出するように構成されている。これにより、たとえば、海底構造物90が海底80の砂などに埋まり、目視できない場合でも、海底構造物90の深さ位置25を取得することが可能となるので、海底構造物90の位置を精度よく取得することができる。
また、本実施形態では、上記のように、磁気センサ2および電位差センサ1が設けられ、水中を移動可能な移動体4をさらに備える。これにより、磁気センサ2および電位差センサ1を一体的に移動させることができる。したがって、防食層6に損傷6aがある場合には、磁気信号31における第1ピーク60の検知タイミングと、電界信号30における第2ピーク62の検知タイミングとが、略等しくなる。その結果、たとえば、磁気センサ2と電位差センサ1とを別々に移動させる構成と比較して、第1ピーク60の位置と第2ピーク62の位置とに基づいて、防食層6の損傷6aの位置を容易に取得することができる。
また、本実施形態では、上記のように、電位差センサ1は、一対の電極(第1電極1aおよび第2電極1b)を含み、一対の電位差センサ1は、移動体4において、所定の間隔で上下方向に並ぶように設けられ、磁気センサ2は、一対の電極の間の位置に設けられている。これにより、一対の電極、および、磁気センサ2を、移動体4の進行方向に対して直交する方向に配置することができる。したがって、たとえば、移動体4を海底構造物90が延びる方向に沿って移動させながら検知を行う場合に、一対の電極、および、磁気センサ2を、海底構造物90と直交する位置に容易に配置することができる。その結果、第1ピーク60の位置および第2ピーク62の位置を、略等しくすることが可能となるので、防食層6の損傷6aの位置をより一層容易に取得することができる。
また、本実施形態では、上記のように、移動体4の加速度および姿勢の情報を含む移動体情報22を取得する移動体情報取得部12と、移動体情報22に基づいて、磁気信号31および電界信号30に対して移動体4の姿勢の補正を行う信号補正部10cと、をさらに備え、海底構造物検知部10aは、信号補正部10cによって姿勢の補正が行われた後の磁気信号31である補正磁気信号31aに基づいて、海底構造物90の有無を検知するように構成されており、損傷検知部10bは、補正磁気信号31aと、信号補正部10cによって姿勢の補正が行われた後の電界信号30である補正電界信号30aとに基づいて、防食層6の損傷6aの有無を検知するように構成されている。これにより、移動体4の姿勢を補正することなく、海底構造物90の有無を検知、および、防食層6の損傷6aの有無の検知を行うことができる。したがって、移動体4の姿勢を補正しながら海底構造物90の有無の検知および防食層6の損傷6aの有無の検知を行う構成とは異なり、移動体4の姿勢制御を行うことなく海底構造物90の有無の検知および防食層6の損傷6aの有無の検知を行うことができる。その結果、移動体4の移動の自由度を向上させることが可能となるので、海底構造物90の有無を検知、および、防食層6の損傷6aの有無の検知の自由度を向上させることができる。
また、本実施形態では、上記のように、移動体4には、磁気センサ2と、電位差センサ1と、移動体4に対して推進力を与える推進機構4dとが設けられ、海中を走行可能に構成されている。これにより、たとえば、船舶5によって移動体4を曳航することにより移動体4を移動させる構成と比較して、移動体4の移動の自由度を向上させることができる。
また、本実施形態では、上記のように、海底構造物90は、海底80に設けられたパイプラインであり、海底構造物検知部10aは、パイプラインの有無を判定するように構成されており、防食層6の損傷6aは、防食層6の腐食であり、損傷検知部10bは、パイプラインの腐食の有無を検知するように構成されている。これにより、パイプラインの有無の検知、および、パイプラインの腐食の有無の検知に適した海底構造物検出システム100を提供することができる。
(変形例)
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく、特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。
たとえば、上記実施形態では、損傷検知部10bが、基準磁気信号20と磁気信号31とに基づいて、電流に起因する磁気成分を取得し、防食層6の損傷6aの有無を検知する構成の例を示したが、本発明はこれに限られない。たとえば、損傷検知部10bは、基準磁気信号20を用いることなく、防食層6の損傷6aの有無を検知するように構成されていてもよい。
また、上記実施形態では、損傷検知部10bが、差分磁気信号32を取得する構成の例を示したが、本発明はこれに限られない。たとえば、損傷検知部10bは、差分磁気信号32を取得しなくてもよい。しかしながら、損傷検知部10bが差分磁気信号32を取得しない場合、地磁気などのノイズに起因して、防食層6の損傷6aの有無の検知精度が低下する。したがって、損傷検知部10bは、差分磁気信号32を取得するように構成することが好ましい。
また、上記実施形態では、海底構造物検知部10aが、海底構造物90の深さ位置25を取得する構成の例を示したが、本発明をこれに限られない。たとえば、海底構造物検知部10aは、海底構造物90の深さ位置25を取得しなくてもよい。
また、上記実施形態では、移動体4が自律走行可能に構成される例を示したが、本発明はこれに限られない。たとえば、移動体4は、船舶5によって曳航されることにより、海中を移動するように構成されていてもよい。
また、上記実施形態では、海底構造物検出システム100が、信号補正部10cを備える構成の例を示したが、本発明はこれに限られない。たとえば、海底構造物検出システム100は、信号補正部10cを備えていなくてもよい。しかしながら、海底構造物検出システム100が信号補正部10cを備えていない場合、海底構造物90の有無の検知精度、および、防食層6の損傷6aの有無の検知精度が低下する。したがって、海底構造物検出システム100は、信号補正部10cを備えていることが好ましい。
また、上記実施形態では、コンピュータ3と移動体4とが無線通信によって通信する構成の例を示したが、本発明はこれに限られない。たとえば、コンピュータ3と移動体4とが有線接続されており、有線通信を行うように構成されていてもよい。
また、上記実施形態では、損傷検知部10bが、第1ピーク60および第2ピーク62のいずれかが検知される場合に、防食層6に損傷6aがあると判定する構成の例を示したが、本発明はこれに限られない。たとえば、損傷検知部10bは、第1ピーク60および第2ピーク62の両方が検知される場合に、防食層6に損傷6aがあると判定するように構成されていてもよい。
また、上記実施形態では、説明の便宜上、海底構造物検知部10aの制御処理、および、損傷検知部10bの制御処理を、処理フローに沿って順番に処理を行うフロー駆動型のフローチャートを用いて説明した例について示したが、本発明はこれに限られない。本発明では、海底構造物検知部10aの制御処理、および、損傷検知部10bの制御処理を、イベント単位で処理を実行するイベント駆動型(イベントドリブン型)の処理により行ってもよい。この場合、完全なイベント駆動型で行ってもよいし、イベント駆動およびフロー駆動を組み合わせて行ってもよい。
[態様]
上記した例示的な実施形態は、以下の態様の具体例であることが当業者により理解される。
(項目1)
海底に設けられた金属製の海底構造物の検知および前記海底構造物に設けられ、前記海底構造物を構成する金属とはイオン化傾向が異なる金属によって形成された防食層の損傷の有無を検知する海底構造物検出システムであって、
前記海底構造物と前記防食層との間に流れる電流に起因する電位差を検知する電位差センサと、
海中の磁気を検知する磁気センサと、
前記磁気センサによって出力された磁気信号に基づいて、前記海底構造物の有無を検知する海底構造物検知部と、
前記磁気信号と前記電位差センサによって出力された電界信号とに基づいて、前記防食層の損傷の有無を検知する損傷検知部と、を備える、海底構造物検出システム。
(項目2)
前記損傷検知部は、前記海底構造物のうちの前記防食層の損傷が生じた箇所と前記防食層との間に流れる前記電流に起因する磁気成分と、前記電界信号に含まれる前記電流の成分とに基づいて、前記防食層の損傷の有無を検知するように構成されている、項目1に記載の海底構造物検出システム。
(項目3)
予め取得された基準磁気信号を記憶する記憶部をさらに備え、
前記損傷検知部は、前記基準磁気信号と前記磁気信号とに基づいて、前記電流に起因する前記磁気成分を取得するように構成されている、項目2に記載の海底構造物検出システム。
(項目4)
前記損傷検知部は、前記磁気信号から前記基準磁気信号を差分して得られる信号である差分磁気信号の第1ピークと、前記電界信号の第2ピークとに基づいて、前記防食層の損傷の有無を検知するように構成されている、項目3に記載の海底構造物検出システム。
(項目5)
前記損傷検知部は、前記第1ピークの取得位置である第1取得位置と、前記第2ピークの取得位置である第2取得位置とに基づいて、前記防食層の損傷の位置を検知するように構成されている、項目4に記載の海底構造物検出システム。
(項目6)
前記記憶部は、前記基準磁気信号を取得した際の前記磁気センサと前記海底構造物との間の距離である基準距離を記憶するように構成されており、
前記海底構造物検知部は、前記基準磁気信号の波形の振幅と、前記基準距離と、前記磁気信号の振幅とに基づいて、前記海底構造物の深さ位置を検出するように構成されている、項目3~5のいずれか1項に記載の海底構造物検出システム。
(項目7)
前記磁気センサおよび前記電位差センサが設けられ、水中を移動可能な移動体をさらに備える、項目1~6のいずれか1項に記載の海底構造物検出システム。
(項目8)
前記電位差センサは、一対の電極を含み、
一対の前記電位差センサは、前記移動体において、所定の間隔で上下方向に並ぶように設けられ、
前記磁気センサは、一対の前記電極の間の位置に設けられている、項目7に記載の海底構造物検出システム。
(項目9)
前記移動体の加速度および姿勢の情報を含む移動体情報を取得する移動体情報取得部と、
前記移動体情報に基づいて、前記磁気信号および前記電界信号に対して前記移動体の姿勢の補正を行う信号補正部と、をさらに備え、
前記海底構造物検知部は、前記信号補正部によって姿勢の補正が行われた後の前記磁気信号である補正磁気信号に基づいて、前記海底構造物の有無を検知するように構成されており、
前記損傷検知部は、前記補正磁気信号と、前記信号補正部によって姿勢の補正が行われた後の前記電界信号である補正電界信号とに基づいて、前記防食層の損傷の有無を検知するように構成されている、項目7または8に記載の海底構造物検出システム。
(項目10)
前記移動体には、前記磁気センサと、前記電位差センサと、前記移動体に対して推進力を与える推進機構とが設けられ、海中を走行可能に構成されている、項目7~9のいずれか1項に記載の海底構造物検出システム。
(項目11)
前記海底構造物は、海底に設けられたパイプラインであり、
前記海底構造物検知部は、前記パイプラインの有無を判定するように構成されており、
前記防食層の損傷は、前記防食層の腐食であり、
前記損傷検知部は、前記パイプラインの腐食の有無を検知するように構成されている、項目1~10のいずれか1項に記載の海底構造物検出システム。