JPWO2012086830A1 - 増幅装置およびその制御方法 - Google Patents
増幅装置およびその制御方法 Download PDFInfo
- Publication number
- JPWO2012086830A1 JPWO2012086830A1 JP2012549907A JP2012549907A JPWO2012086830A1 JP WO2012086830 A1 JPWO2012086830 A1 JP WO2012086830A1 JP 2012549907 A JP2012549907 A JP 2012549907A JP 2012549907 A JP2012549907 A JP 2012549907A JP WO2012086830 A1 JPWO2012086830 A1 JP WO2012086830A1
- Authority
- JP
- Japan
- Prior art keywords
- amplitude
- unit
- coefficient
- control unit
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 74
- 230000003321 amplification Effects 0.000 claims abstract description 67
- 238000003199 nucleic acid amplification method Methods 0.000 claims abstract description 67
- 238000012937 correction Methods 0.000 claims description 77
- 238000004364 calculation method Methods 0.000 claims description 38
- 238000007493 shaping process Methods 0.000 claims description 32
- 229920006395 saturated elastomer Polymers 0.000 claims description 11
- 230000006870 function Effects 0.000 description 40
- 238000010586 diagram Methods 0.000 description 20
- 238000012545 processing Methods 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000005457 optimization Methods 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- 238000005191 phase separation Methods 0.000 description 2
- 238000007781 pre-processing Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 101100440934 Candida albicans (strain SC5314 / ATCC MYA-2876) CPH1 gene Proteins 0.000 description 1
- 101100273252 Candida parapsilosis SAPP1 gene Proteins 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000003446 memory effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/32—Modifications of amplifiers to reduce non-linear distortion
- H03F1/3241—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits
- H03F1/3282—Acting on the phase and the amplitude of the input signal
- H03F1/3288—Acting on the phase and the amplitude of the input signal to compensate phase shift as a function of the amplitude
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/02—Modifications of amplifiers to raise the efficiency, e.g. gliding Class A stages, use of an auxiliary oscillation
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/02—Modifications of amplifiers to raise the efficiency, e.g. gliding Class A stages, use of an auxiliary oscillation
- H03F1/0205—Modifications of amplifiers to raise the efficiency, e.g. gliding Class A stages, use of an auxiliary oscillation in transistor amplifiers
- H03F1/0211—Modifications of amplifiers to raise the efficiency, e.g. gliding Class A stages, use of an auxiliary oscillation in transistor amplifiers with control of the supply voltage or current
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F1/00—Details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements
- H03F1/32—Modifications of amplifiers to reduce non-linear distortion
- H03F1/3241—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits
- H03F1/3247—Modifications of amplifiers to reduce non-linear distortion using predistortion circuits using feedback acting on predistortion circuits
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F3/00—Amplifiers with only discharge tubes or only semiconductor devices as amplifying elements
- H03F3/20—Power amplifiers, e.g. Class B amplifiers, Class C amplifiers
- H03F3/24—Power amplifiers, e.g. Class B amplifiers, Class C amplifiers of transmitter output stages
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03F—AMPLIFIERS
- H03F2201/00—Indexing scheme relating to details of amplifiers with only discharge tubes, only semiconductor devices or only unspecified devices as amplifying elements covered by H03F1/00
- H03F2201/32—Indexing scheme relating to modifications of amplifiers to reduce non-linear distortion
- H03F2201/3233—Adaptive predistortion using lookup table, e.g. memory, RAM, ROM, LUT, to generate the predistortion
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- Nonlinear Science (AREA)
- Amplifiers (AREA)
Abstract
増幅装置の低歪み特性と高効率動作を同時に実現することが困難であるため、本発明の増幅装置は、入力信号に対して位相補償量および振幅調整量を付加した変調信号を出力する第1のプリディストータ部と、変調信号を入力し、変調信号を増幅した出力信号を出力する電力増幅器と、電力増幅器の電源電圧を変調する電源電圧変調部と、入力信号の振幅情報に基づいて、電源電圧変調部の制御を行う第2のプリディストータ部と、第1のプリディストータ部と第2のプリディストータ部の動作を制御する制御部、とを有し、制御部は、位相補償量を位相係数によって制御する位相制御部と、振幅調整量を第1の振幅係数によって制御する第1の振幅制御部と、第2のプリディストータ部の動作を第2の振幅係数によって制御する第2の振幅制御部、とを備え、第1の振幅制御部と第2の振幅制御部は連動して、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率を一定に制御する。
Description
本発明は、増幅装置およびその制御方法に関し、特に、高効率かつ低歪み特性を備えた増幅装置およびその制御方法に関する。
無線通信システムの基地局などで用いられる送信装置においては、送信装置の小型化、低消費電力化を図るため、電力効率の高い増幅装置が求められる。増幅装置の高効率化を実現する技術として、電源電圧を入力信号に応じて制御することにより消費電力を低減する技術が知られている。その中でも特に有効な方式の一つにエンベロープトラッキング(Envelope Tracking)方式がある。
エンベロープトラッキング方式は、電力増幅器(Power Amplifier:PA)などの増幅器の電源電圧を入力信号の振幅に応じて変化させる方式である。この方式によれば、電源から供給される電力は一定の電圧で動作させた場合と比べて減少するので、高効率な信号増幅が可能となる。ここで、出力信号電圧が電力増幅器の電源電圧を超えると、出力飽和が起きて入出力の線形性が失われてしまう。そのため一般的には、電力増幅器に供給される電源電圧が出力信号電圧よりも常に高くなるように設計する。
一方、送信装置に用いられる増幅装置には一般に低歪み特性が要求されるため、デジタルプリディストーション(Digital Pre−distortion:DPD)方式などの歪補償方式が採用されている。デジタルプリディストーション(DPD)方式とは、増幅装置を構成する電力増幅器に入力する信号を予めプリディストータによって歪ませておくことによって電力増幅器による歪みを打ち消し、増幅装置の低歪み特性を実現する方式である。デジタルプリディストーション(DPD)方式では、電力増幅器の入出力信号を比較することにより電力増幅器の歪みモデルを作成し、この歪みモデルの逆特性をプリディストータに設定している。
このようなデジタルプリディストーション(DPD)方式の構成例の一つに、ルックアップ・テーブル(Look Up Table:LUT)を用いた方式がある。ルックアップ・テーブル(LUT)には、入力振幅の大きさごとに対応する補正値が予め記録されており、この補正値は電力増幅器の歪みを打ち消すように逐次更新される。このルックアップ・テーブル(LUT)を用いて補償される歪みには2種類ある。一つは信号の入力振幅に対する出力振幅の特性(以下、「AM−AM特性」という)における非線形性による歪みであり、もう一つは入力振幅に対する出力位相の特性(以下、「AM−PM特性」という)における非線形性による歪みである。この2種類の歪みを補正することによって増幅装置の入出力信号特性が線形関係となり、歪みが抑制される。なお、ルックアップ・テーブル(LUT)は、上述したAM−AM特性補正用とAM−PM特性補正用に分けた構成には限られない。複素信号の入出力データ列を用いて複素数の値を持つルックアップ・テーブル(LUT)を構成する方式も知られている。
デジタルプリディストーション(DPD)方式のその他の構成例には、電力増幅器に対する歪みの補正量を多項式で近似する方式がある。この場合は、電力増幅器の出力信号と入力信号とを用いて多項式の係数値を算出し、係数値を逐次更新することによって電力増幅器の非線形特性を打ち消している。また、プリディストータにフィルタ特性を持たせ、フィルタのタップ数を選択することによって過去の情報を考慮して電力増幅器のメモリ効果を抑制する方式が知られている。
上述の説明では、エンベロープトラッキング方式とデジタルプリディストーション(DPD)方式を個別に採用した増幅装置についてそれぞれ説明したが、両方式を共に適用した構成とすることも可能である。このような増幅装置の一例が特許文献1に記載されている。
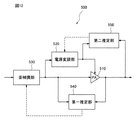
図12に示すように、特許文献1に記載された関連する増幅装置500は、電力増幅器510、電源変調部520、歪補償部530、第一推定部540、および第二推定部550を備える。電源変調部520は電力増幅器510に入力信号に応じた電源変調電圧を付与し、歪補償部530は電力増幅器510の歪補償を行う。また、第一推定部540は電力増幅器510の入力信号及び出力信号に基づいて、入力信号と出力信号との間における電力増幅器510の特性を示す第一の増幅器モデルを推定する。一方、第二推定部550は電源変調電圧及び出力信号に基づいて、電源変調電圧と出力信号との間における電力増幅器510の特性を示す第二の増幅器モデルを推定する。そして、歪補償部530が第一の増幅器モデルに基づいて電力増幅器510の歪補償を行うとともに、電源変調部520が第二の増幅器モデルに基づいて電源変調電圧を制御する。
このように、関連する増幅装置500においては、歪補償部530と電源変調部520とは、それぞれ互いに独立した推定部より得られる第一及び第二の増幅器モデルに基づいて、互いに独立して歪補償及び電源変調電圧の制御を行っている。そのため、電源変調特性及び歪補償特性の双方を電力増幅器510の特性に応じて好適に制御することが可能となり、これら制御を行うための演算を簡略化できるとしている。
特開2010−045508号公報(段落「0014」「0015」、図3)
エンベロープトラッキング方式は、電力増幅器(Power Amplifier:PA)などの増幅器の電源電圧を入力信号の振幅に応じて変化させる方式である。この方式によれば、電源から供給される電力は一定の電圧で動作させた場合と比べて減少するので、高効率な信号増幅が可能となる。ここで、出力信号電圧が電力増幅器の電源電圧を超えると、出力飽和が起きて入出力の線形性が失われてしまう。そのため一般的には、電力増幅器に供給される電源電圧が出力信号電圧よりも常に高くなるように設計する。
一方、送信装置に用いられる増幅装置には一般に低歪み特性が要求されるため、デジタルプリディストーション(Digital Pre−distortion:DPD)方式などの歪補償方式が採用されている。デジタルプリディストーション(DPD)方式とは、増幅装置を構成する電力増幅器に入力する信号を予めプリディストータによって歪ませておくことによって電力増幅器による歪みを打ち消し、増幅装置の低歪み特性を実現する方式である。デジタルプリディストーション(DPD)方式では、電力増幅器の入出力信号を比較することにより電力増幅器の歪みモデルを作成し、この歪みモデルの逆特性をプリディストータに設定している。
このようなデジタルプリディストーション(DPD)方式の構成例の一つに、ルックアップ・テーブル(Look Up Table:LUT)を用いた方式がある。ルックアップ・テーブル(LUT)には、入力振幅の大きさごとに対応する補正値が予め記録されており、この補正値は電力増幅器の歪みを打ち消すように逐次更新される。このルックアップ・テーブル(LUT)を用いて補償される歪みには2種類ある。一つは信号の入力振幅に対する出力振幅の特性(以下、「AM−AM特性」という)における非線形性による歪みであり、もう一つは入力振幅に対する出力位相の特性(以下、「AM−PM特性」という)における非線形性による歪みである。この2種類の歪みを補正することによって増幅装置の入出力信号特性が線形関係となり、歪みが抑制される。なお、ルックアップ・テーブル(LUT)は、上述したAM−AM特性補正用とAM−PM特性補正用に分けた構成には限られない。複素信号の入出力データ列を用いて複素数の値を持つルックアップ・テーブル(LUT)を構成する方式も知られている。
デジタルプリディストーション(DPD)方式のその他の構成例には、電力増幅器に対する歪みの補正量を多項式で近似する方式がある。この場合は、電力増幅器の出力信号と入力信号とを用いて多項式の係数値を算出し、係数値を逐次更新することによって電力増幅器の非線形特性を打ち消している。また、プリディストータにフィルタ特性を持たせ、フィルタのタップ数を選択することによって過去の情報を考慮して電力増幅器のメモリ効果を抑制する方式が知られている。
上述の説明では、エンベロープトラッキング方式とデジタルプリディストーション(DPD)方式を個別に採用した増幅装置についてそれぞれ説明したが、両方式を共に適用した構成とすることも可能である。このような増幅装置の一例が特許文献1に記載されている。
図12に示すように、特許文献1に記載された関連する増幅装置500は、電力増幅器510、電源変調部520、歪補償部530、第一推定部540、および第二推定部550を備える。電源変調部520は電力増幅器510に入力信号に応じた電源変調電圧を付与し、歪補償部530は電力増幅器510の歪補償を行う。また、第一推定部540は電力増幅器510の入力信号及び出力信号に基づいて、入力信号と出力信号との間における電力増幅器510の特性を示す第一の増幅器モデルを推定する。一方、第二推定部550は電源変調電圧及び出力信号に基づいて、電源変調電圧と出力信号との間における電力増幅器510の特性を示す第二の増幅器モデルを推定する。そして、歪補償部530が第一の増幅器モデルに基づいて電力増幅器510の歪補償を行うとともに、電源変調部520が第二の増幅器モデルに基づいて電源変調電圧を制御する。
このように、関連する増幅装置500においては、歪補償部530と電源変調部520とは、それぞれ互いに独立した推定部より得られる第一及び第二の増幅器モデルに基づいて、互いに独立して歪補償及び電源変調電圧の制御を行っている。そのため、電源変調特性及び歪補償特性の双方を電力増幅器510の特性に応じて好適に制御することが可能となり、これら制御を行うための演算を簡略化できるとしている。
上述した関連する増幅装置500においては、歪補償部530で増幅装置の歪み特性の最小化を、電源変調部520で増幅装置の効率の最大化を図ることとしている。しかしながら、歪補償部530と電源変調部520とは互いに独立して歪補償及び電源変調電圧の制御を行うことになるため、両者がそれぞれ最適な点に収束するとは限らない、という問題があった。すなわち、歪補償または電源変調電圧のパラメータのいずれか一方を最適化した後に固定して他方の最適化を行うと、他方のパラメータの変化により電力増幅器自体の特性が変化してしまう。そのため、先に最適化したパラメータの最適点がずれてしまうので、両方のパラメータを最適に設定することが困難であった。
このように、関連する増幅装置においては、増幅装置の低歪み特性と高効率動作を同時に実現することが困難である、という問題があった。
本発明の目的は、上述した課題である、増幅装置の低歪み特性と高効率動作を同時に実現することが困難である、という課題を解決する増幅装置およびその制御方法を提供することにある。
このように、関連する増幅装置においては、増幅装置の低歪み特性と高効率動作を同時に実現することが困難である、という問題があった。
本発明の目的は、上述した課題である、増幅装置の低歪み特性と高効率動作を同時に実現することが困難である、という課題を解決する増幅装置およびその制御方法を提供することにある。
本発明の増幅装置は、入力信号に対して位相補償量および振幅調整量を付加した変調信号を出力する第1のプリディストータ部と、変調信号を入力し、変調信号を増幅した出力信号を出力する電力増幅器と、電力増幅器の電源電圧を変調する電源電圧変調部と、入力信号の振幅情報に基づいて、電源電圧変調部の制御を行う第2のプリディストータ部と、第1のプリディストータ部と第2のプリディストータ部の動作を制御する制御部、とを有し、制御部は、位相補償量を位相係数によって制御する位相制御部と、振幅調整量を第1の振幅係数によって制御する第1の振幅制御部と、第2のプリディストータ部の動作を第2の振幅係数によって制御する第2の振幅制御部、とを備え、第1の振幅制御部と第2の振幅制御部は連動して、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率を一定に制御する。
本発明の電力増幅器の制御装置は、電源電圧を変調する電源電圧変調部を備えた電力増幅器の制御装置であって、入力信号に対して位相補償量および振幅調整量を付加した変調信号を電力増幅器に出力する第1のプリディストータ部と、入力信号の振幅情報に基づいて、電源電圧変調部の制御を行う第2のプリディストータ部と、第1のプリディストータ部と第2のプリディストータ部の動作を制御する制御部、とを有し、制御部は、位相補償量を位相係数によって制御する位相制御部と、振幅調整量を第1の振幅係数によって制御する第1の振幅制御部と、第2のプリディストータ部の動作を第2の振幅係数によって制御する第2の振幅制御部、とを備え、第1の振幅制御部と第2の振幅制御部は連動して、入力信号の振幅に対する電力増幅器の出力信号の振幅の比である振幅増幅率を一定に制御する。
本発明の増幅装置の制御方法は、増幅装置の入力信号と出力信号の位相誤差が最小となるように、入力信号に対する位相補償量を決定する位相係数を更新し、位相誤差を最小にする位相係数である位相補正値を算出し、入力信号に、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとる関数を作用させることによって入力変調信号を作成し、入力変調信号と出力信号の振幅誤差が最小となるように、入力信号に対する振幅調整量を決定する第1の振幅係数を更新し、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出し、第1の振幅補正値を一定とした状態で、増幅装置を構成する電力増幅器が出力飽和状態となる電源電圧を供給するように、入力信号の振幅情報に基づいて、電力増幅器の電源電圧の振幅を決定する第2の振幅係数を更新し、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出し、位相補正値を用いて、入力信号と出力信号との間における位相誤差を補償し、第1の振幅補正値と第2の振幅補正値とを用いて、振幅増幅率を一定に制御する。
本発明のプログラムは、コンピュータに、増幅装置の入力信号と出力信号の位相誤差が最小となるように、入力信号に対する位相補償量を決定する位相係数を更新する手順と、位相誤差を最小にする位相係数である位相補正値を算出する手順と、入力信号に、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとる関数を作用させることによって入力変調信号を作成する手順と、入力変調信号と出力信号の振幅誤差が最小となるように、入力信号に対する振幅調整量を決定する第1の振幅係数を更新する手順と、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出する手順と、第1の振幅補正値を一定とした状態で、増幅装置を構成する電力増幅器が出力飽和状態となる電源電圧を供給するように、入力信号の振幅情報に基づいて、電力増幅器の電源電圧の振幅を決定する第2の振幅係数を更新する手順と、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出する手順と、位相補正値を用いて、入力信号と出力信号との間における位相誤差を補償し、第1の振幅補正値と第2の振幅補正値とを用いて、振幅増幅率を一定に制御する手順を実行させる。
本発明の電力増幅器の制御装置は、電源電圧を変調する電源電圧変調部を備えた電力増幅器の制御装置であって、入力信号に対して位相補償量および振幅調整量を付加した変調信号を電力増幅器に出力する第1のプリディストータ部と、入力信号の振幅情報に基づいて、電源電圧変調部の制御を行う第2のプリディストータ部と、第1のプリディストータ部と第2のプリディストータ部の動作を制御する制御部、とを有し、制御部は、位相補償量を位相係数によって制御する位相制御部と、振幅調整量を第1の振幅係数によって制御する第1の振幅制御部と、第2のプリディストータ部の動作を第2の振幅係数によって制御する第2の振幅制御部、とを備え、第1の振幅制御部と第2の振幅制御部は連動して、入力信号の振幅に対する電力増幅器の出力信号の振幅の比である振幅増幅率を一定に制御する。
本発明の増幅装置の制御方法は、増幅装置の入力信号と出力信号の位相誤差が最小となるように、入力信号に対する位相補償量を決定する位相係数を更新し、位相誤差を最小にする位相係数である位相補正値を算出し、入力信号に、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとる関数を作用させることによって入力変調信号を作成し、入力変調信号と出力信号の振幅誤差が最小となるように、入力信号に対する振幅調整量を決定する第1の振幅係数を更新し、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出し、第1の振幅補正値を一定とした状態で、増幅装置を構成する電力増幅器が出力飽和状態となる電源電圧を供給するように、入力信号の振幅情報に基づいて、電力増幅器の電源電圧の振幅を決定する第2の振幅係数を更新し、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出し、位相補正値を用いて、入力信号と出力信号との間における位相誤差を補償し、第1の振幅補正値と第2の振幅補正値とを用いて、振幅増幅率を一定に制御する。
本発明のプログラムは、コンピュータに、増幅装置の入力信号と出力信号の位相誤差が最小となるように、入力信号に対する位相補償量を決定する位相係数を更新する手順と、位相誤差を最小にする位相係数である位相補正値を算出する手順と、入力信号に、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとる関数を作用させることによって入力変調信号を作成する手順と、入力変調信号と出力信号の振幅誤差が最小となるように、入力信号に対する振幅調整量を決定する第1の振幅係数を更新する手順と、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出する手順と、第1の振幅補正値を一定とした状態で、増幅装置を構成する電力増幅器が出力飽和状態となる電源電圧を供給するように、入力信号の振幅情報に基づいて、電力増幅器の電源電圧の振幅を決定する第2の振幅係数を更新する手順と、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出する手順と、位相補正値を用いて、入力信号と出力信号との間における位相誤差を補償し、第1の振幅補正値と第2の振幅補正値とを用いて、振幅増幅率を一定に制御する手順を実行させる。
本発明の増幅装置およびその制御方法によれば、増幅装置の低歪み特性と高効率動作を同時に実現することができる。
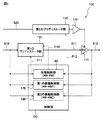
図1は本発明の第1の実施形態に係る増幅装置の構成を示すブロック図である。
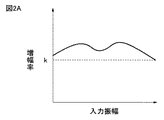
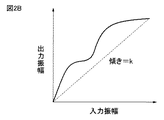
図2A、2Bは本発明の第1の実施形態に係る増幅装置の制御部の動作を説明するための特性図である。
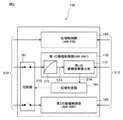
図3は本発明の第1の実施形態に係る増幅装置の制御部の構成を示すブロック図である。
図4は本発明の第1の実施形態に係る増幅装置の動作を説明するためのシーケンス図である。
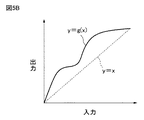
図5A、5Bは本発明の第1の実施形態に係る増幅装置の制御部で用いるシェーピング関数の入出力特性曲線を示す図である。
図6は本発明の第2の実施形態に係る増幅装置の構成を示すブロック図である。
図7は本発明の第2の実施形態に係る増幅装置の制御部の構成を示すブロック図である。
図8は本発明の第2の実施形態に係る増幅装置の制御部の構成の一部を示すブロック図である。
図9は本発明の第2の実施形態に係る増幅装置の制御部の構成の別の一部を示すブロック図である。
図10は本発明の第2の実施形態に係る増幅装置の制御部の動作を説明するためのシーケンス図である。
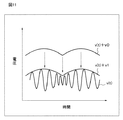
図11は本発明の第2の実施形態に係る増幅装置の電力増幅器に供給する電源電圧の制御手法を説明するための図である。
図12は関連する増幅装置の構成を示すブロック図である。
図2A、2Bは本発明の第1の実施形態に係る増幅装置の制御部の動作を説明するための特性図である。
図3は本発明の第1の実施形態に係る増幅装置の制御部の構成を示すブロック図である。
図4は本発明の第1の実施形態に係る増幅装置の動作を説明するためのシーケンス図である。
図5A、5Bは本発明の第1の実施形態に係る増幅装置の制御部で用いるシェーピング関数の入出力特性曲線を示す図である。
図6は本発明の第2の実施形態に係る増幅装置の構成を示すブロック図である。
図7は本発明の第2の実施形態に係る増幅装置の制御部の構成を示すブロック図である。
図8は本発明の第2の実施形態に係る増幅装置の制御部の構成の一部を示すブロック図である。
図9は本発明の第2の実施形態に係る増幅装置の制御部の構成の別の一部を示すブロック図である。
図10は本発明の第2の実施形態に係る増幅装置の制御部の動作を説明するためのシーケンス図である。
図11は本発明の第2の実施形態に係る増幅装置の電力増幅器に供給する電源電圧の制御手法を説明するための図である。
図12は関連する増幅装置の構成を示すブロック図である。
以下に、図面を参照しながら、本発明の実施形態について説明する。
〔第1の実施形態〕
図1は、本発明の第1の実施形態に係る増幅装置100の構成を示すブロック図である。増幅装置100はエンベロープトラッキング方式の増幅装置であり、電力増幅器(PA)110と、電力増幅器110の電源電圧を変調する電源電圧変調部120を有する。さらに、電力増幅器110の前段に配置された第1のプリディストータ部130、電源電圧変調部120の前段に配置された第2のプリディストータ部140、および制御部150を有する。第1のプリディストータ部130は、入力信号S10に対して位相補償量および振幅調整量を付加した変調信号S11を電力増幅器(PA)110に出力する。第2のプリディストータ部140は、増幅装置100の入力信号の振幅情報S20を入力側から取得し、振幅情報S20に基づいて電源電圧変調部120の制御を行う。制御部150は、第1のプリディストータ部130と第2のプリディストータ部140の動作を制御する。ここで、電力増幅器110は第1のプリディストータ部130から変調信号S11を入力し、変調信号S11を増幅した出力信号S12を出力する。
制御部150は、位相制御部(AM−PM)160、第1の振幅制御部(AM−AM1)170、および第2の振幅制御部(AM−AM2)180を備える。位相制御部(AM−PM)160は第1のプリディストータ部130の位相補償量を位相係数P10によって制御する。ここで位相補償量とは、入力振幅に対する出力位相の特性(AM−PM特性)における非線形性による歪みを補償する位相量を言う。
第1の振幅制御部(AM−AM1)170は第1のプリディストータ部130の振幅調整量を第1の振幅係数P11によって制御する。第2の振幅制御部(AM−AM2)180は第2のプリディストータ部140の動作を第2の振幅係数P12によって制御する。ここで、第1の振幅制御部170と第2の振幅制御部180は連動して、増幅装置100の入力信号S10の振幅に対する出力信号S12の振幅の比である振幅増幅率が一定となるように制御する。このとき、入力振幅に対する出力振幅の特性(AM−AM特性)は線形関係となるので、増幅装置100の振幅特性における非線形性による歪みは補償される。
このように、本実施形態の増幅装置100においては、第1の振幅制御部170と第2の振幅制御部180が連動して増幅装置100の振幅特性における歪みを補償する。すなわち、第2の振幅制御部180は第2のプリディストータ部140を制御することによって電力増幅器110を高効率で動作させる。そして第1の振幅制御部170は、この動作状態における電力増幅器110の歪み特性を補償する変調信号を第1のプリディストータ部130が出力するように制御する。以上より、本実施形態の増幅装置100によれば、低歪み特性と高効率動作を同時に実現することができる。
図1では、第2のプリディストータ部140は入力信号の振幅情報S20を入力信号S10とは別に入力側から取得する場合について示した。しかし、これに限らず、第2のプリディストータ部140が包絡線検波器(エンベロープディテクタ)を介して入力信号S10から振幅情報を取得することとしてもよい。
次に、本実施形態による増幅装置100の制御部150について、さらに詳細に説明する。位相制御部(AM−PM)160は、入力信号と出力信号の位相誤差が最小となるときの位相係数を位相補正値として算出し、位相補正値に基づいて第1のプリディストータ部130の位相補償量を制御する。
第1の振幅制御部(AM−AM1)170は、図2Aに示すように、振幅増幅率が入力信号の振幅の全範囲において、入力信号の振幅が最大であるときの振幅増幅率である基準振幅増幅率kと等しいか又はこれを上回るように制御する。このとき、入力振幅に対する出力振幅の特性は、図2Bに示すように、全ての入力振幅範囲において出力振幅が傾きk(=基準振幅増幅率)の直線と等しいか又はこれを上回る値をとる。そして第1の振幅制御部(AM−AM1)170は、このときの第1の振幅係数を第1の振幅補正値として算出し、第1の振幅補正値に基づいて第1のプリディストータ部130の振幅調整量を制御する。
第2の振幅制御部(AM−AM2)180は、第1の振幅補正値が一定である条件の下で、入力信号の振幅の全範囲において振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出する。そして、第2の振幅補正値に基づいて第2のプリディストータ部140の動作を制御する。
ここで制御部150が、図3に示すように、切替判定部190と切替部191をさらに有し、第1の振幅制御部170がシェーピング関数演算部171と第1の振幅係数算出部172とを備える構成とすることができる。シェーピング関数演算部171は、シェーピング関数を入力信号に作用させた入力変調信号S13を第1の振幅係数算出部172に出力する。ここでシェーピング関数は、全ての入力値に対して、入力値と等しいか又はこれを上回る出力値をとる関数である。以下では、入出力特性が凸形状であるシェーピング関数を例として説明するが、これに限られない。第1の振幅係数算出部172は、入力変調信号S13と出力信号S12の振幅誤差を最小にする第1の振幅係数を第1の振幅補正値として算出する。このとき、第1の振幅制御部170は第1の振幅補正値に基づいて第1のプリディストータ部130の振幅調整量を制御する。これにより第1のプリディストータ部130は、増幅装置100の入出力振幅特性がシェーピング関数により定まる凸形状となるような変調信号S11を出力する。
切替判定部190は第1の振幅係数算出部172から入力変調信号S13と出力信号S12の振幅誤差を示す振幅誤差情報S14を取得し、振幅誤差情報S14に基づいて切替判定を行う。切替部191は切替判定の結果に基づいて、第1の振幅制御部170の動作状態と第2の振幅制御部180の動作状態を切り替える。具体的には例えば、振幅誤差が所定の閾値を超えたと判断したとき、切替判定部190は切替部191に切替指示信号S15を出力する。そして切替部191は切替指示信号S15を受信したときに、第1の振幅制御部170の動作状態と第2の振幅制御部180の動作状態を切り替えることとすることができる。
第2の振幅制御部180は第2のプリディストータ部140を介して電源電圧変調部120を制御する。このとき電源電圧変調部120は、入力振幅の全範囲において電力増幅器110の各出力が飽和状態となるように電源電圧を制御する。具体的には電力増幅器110の出力が飽和状態となるまで、電源電圧の振幅を低減させる。すなわち第2の振幅制御部180は、電力増幅器110の出力が飽和状態となる電源電圧を電源電圧変調部120が供給するときの第2の振幅係数を第2の振幅補正値として算出し、第2の振幅補正値に基づいて第2のプリディストータ部140の動作を制御する。
ここで、電力増幅器110には上述したように、第1のプリディストータ部130から凸形状の入出力振幅特性を有する変調信号S11が入力される。電力増幅器110の出力が飽和状態となると出力信号S12の振幅は減少するので、電源電圧を上述の構成によって制御することにより、入力信号S10の振幅に対する出力信号S12の振幅の比である振幅増幅率を一定とすることができる。
このように、本実施形態による増幅装置100は、第1の振幅制御部170と第2の振幅制御部180は連動して、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率を一定に制御する構成としている。そのため、電力増幅器110が飽和領域で高効率な動作をしている状態で、入力振幅に対する出力振幅の非線形性による歪みを補償することが可能となる。
次に、本実施形態による増幅装置100の動作を説明する。図4は、増幅装置100の動作を説明するためのシーケンス図である。まず制御部150は、位相制御部(AM−PM)160、第1の振幅制御部170、および第2の振幅制御部(AM−AM2)180における、それぞれの係数を初期化する(ステップS101)。
第1段階において、制御部150は位相制御部(AM−PM)160で算出される位相係数と、第1の振幅制御部170で算出される第1の振幅係数を用いて、第1のプリディストータ部130の動作を制御する。すなわち、位相係数は第1のプリディストータ部130における入力信号に対する位相補償量を決定し、第1の振幅係数は入力信号に対する振幅調整量を決定する。
位相制御部(AM−PM)160は、増幅装置100の入力信号および出力信号を同期させ、同期した入力信号と出力信号の位相誤差が最小となるように位相係数を更新する(ステップS102)。そして、位相誤差を最小にする位相係数である位相補正値を算出する(ステップS103)。この位相補正値によって第1のプリディストータ部130の位相補償量を決定する。このとき、位相補正値の算出には例えば、LMS(Least Mean Square:最小平均二乗)アルゴリズムを用いることができる。
第1の振幅制御部(AM−AM1)170は、増幅装置100の入力信号にシェーピング関数を作用させることによって入力変調信号を作成し、入力変調信号と出力信号を同期させる。同期した入力変調信号と出力信号の振幅誤差が最小となるように第1の振幅係数を更新する(ステップS104)。そして、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出する(ステップS105)。この第1の振幅補正値を用いて、増幅装置100の入出力特性がシェーピング関数と同一となるように第1のプリディストータ部130の振幅調整量を制御する。このとき、第1の振幅補正値の算出にもLMSアルゴリズムを用いることができる。ここで本実施形態では、シェーピング関数として図5Aに示すようなy=xの直線に対して上に凸形状(図中のy=f(x))となる関数を用いた。しかし、これに限らず図5Bに示すように、全ての入力xに対して出力yが、y≧xの条件を満たす関数(図中のy=g(x))であればシェーピング関数として用いることができる。
切替判定部190は第1の振幅制御部(AM−AM1)170における振幅誤差が、例えば最小となったと判断したときに、切替部191に切替指示信号を出力する。そして切替部191は切替指示信号を受信したときに、第1の振幅制御部(AM−AM1)170の動作状態と第2の振幅制御部(AM−AM2)180の動作状態を切り替える。すなわち、第1の振幅制御部(AM−AM1)170を停止状態(OFF)とし(ステップS106)、第2の振幅制御部(AM−AM2)180を動作状態(ON)とする(ステップS107)。したがって第1の振幅補正値は一定となり、第1の振幅補正値に基づいて定まる第1のプリディストータ部130の入出力振幅特性は固定される(ステップS108)。なお切替判定部190は、入力変調信号と出力信号の振幅誤差の値、例えば振幅誤差の平均値が予め指定された閾値を超えたときに、振幅誤差が最小となったと判断するように構成することができる。
続く第2段階において、第2の振幅制御部(AM−AM2)180は第2の振幅係数を更新して第2のプリディストータ部140の動作を制御する。つまり第2のプリディストータ部140は、第2の振幅係数に基づいて電源電圧変調部120を制御し、電力増幅器110の電源電圧の振幅を決定する。具体的には、第2の振幅制御部(AM−AM2)180は、電源電圧の振幅を低減し電力増幅器110が出力飽和状態となる電源電圧を、電源電圧変調部120が供給するように第2の振幅係数を更新する(ステップS109)。このとき、電力増幅器110が出力飽和状態となると出力信号の振幅は減少する。そのため、第1段階の終了時点において凸形状の入出力振幅特性を有する出力信号を、最終的には、入力信号の振幅に対する出力信号の振幅の比が一定となる線形な入出力振幅特性とすることができる。第2の振幅制御部(AM−AM2)180は、このときの第2の振幅係数を第2の振幅補正値として算出し(ステップS110)、第2の振幅補正値に基づいて第2のプリディストータ部140の動作を制御する。
また第2段階においても、位相制御部(AM−PM)160は入力信号と出力信号の位相誤差が最小となるように位相係数を更新し(ステップS111)、位相誤差を最小にする位相係数である位相補正値を算出する(ステップS112)。
以上説明したように、本実施形態の増幅装置100においては、第2の振幅制御部180が第2のプリディストータ部140を制御することによって、電力増幅器110は高効率で動作する。そして第1の振幅制御部170は、この動作状態における電力増幅器110の歪み特性を補償する変調信号を第1のプリディストータ部130が出力するように制御する。さらに、位相制御部(AM−PM)160は入力信号と出力信号の位相誤差が最小となるように常に第1のプリディストータ部130を制御する。このような構成とすることにより、本実施形態によれば、電力増幅器110が飽和領域で高効率な動作をしている状態において、入出力信号の振幅誤差および位相誤差を共に補償することが可能となる。
以上の説明では、増幅装置100は、電力増幅器110、電源電圧変調部120、第1のプリディストータ部130、第2のプリディストータ部140、および制御部150を有する構成とした。ここで、第1のプリディストータ部130と、第2のプリディストータ部140と、制御部150とが電力増幅器の制御装置を構成することとしてもよい。この場合においても、電力増幅器の制御装置と電源電圧変調部120と電力増幅器110を備えた構成によって、本実施形態の増幅装置100と同一の効果を得ることができる。電力増幅器の制御装置は例えば、特定用途向け集積回路(Application Specific Integrated Circuit:ASIC)によって実装することができる。
また、上述の各ステップをコンピュータに実行させることとしてもよい。すなわち、コンピュータに、増幅装置の入力信号と出力信号の位相誤差が最小となるように、入力信号に対する位相補償量を決定する位相係数を更新する手順と、位相誤差を最小にする位相係数である位相補正値を算出する手順と、入力信号に、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとる関数を作用させることによって入力変調信号を作成する手順と、入力変調信号と出力信号の振幅誤差が最小となるように、入力信号に対する振幅調整量を決定する第1の振幅係数を更新する手順と、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出する手順と、第1の振幅補正値を一定とした状態で、増幅装置を構成する電力増幅器が出力飽和状態となる電源電圧を供給するように、入力信号の振幅情報に基づいて、電力増幅器の電源電圧の振幅を決定する第2の振幅係数を更新する手順と、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出する手順と、位相補正値を用いて、入力信号と出力信号との間における位相誤差を補償し、第1の振幅補正値と第2の振幅補正値とを用いて、振幅増幅率を一定に制御する手順、を実行させることができる。この場合、コンピュータとしてプログラム可能な論理演算回路(論理ブロック)を用いることができ、例えば、かかる論理ブロックを備えたフィールド・プログラマブル・ゲート・アレイ(Field Programmable Gate Array:FPGA)などによって実装することができる。
〔第2の実施形態〕
次に、本発明の第2の実施形態について説明する。図6は、本実施形態に係る増幅装置200の構成を示すブロック図である。増幅装置200はエンベロープトラッキング方式の増幅装置であり、電力増幅器(PA)110と、電力増幅器110の電源電圧を変調する電源電圧変調部120を有する。さらに、電力増幅器110の前段に配置された第1のプリディストータ部130、電源電圧変調部120の前段に配置された第2のプリディストータ部140、および制御部250を有する。
第1のプリディストータ部130は、入力信号S10に対して位相補償量および振幅調整量を付加した変調信号S11を電力増幅器(PA)110に出力する。第2のプリディストータ部140は、増幅装置200の入力信号の振幅情報S20を入力側から取得し、振幅情報S20に基づいて電源電圧変調部120の制御を行う。制御部250は、第1のプリディストータ部130と第2のプリディストータ部140の動作を制御する。ここで、電力増幅器110は第1のプリディストータ部130から変調信号S11を入力し、変調信号S11を増幅した出力信号S12を出力する。ここまでの構成は、第1の実施形態による増幅装置100の構成と同様である。
なお図6では、第2のプリディストータ部140が包絡線検波器(エンベロープディテクタ、図示せず)などを介して入力信号S10から振幅情報S20を取得する構成を示した。また、増幅装置200では、増幅装置200の入力信号および出力信号を同期させるため、制御部250の前段に入力信号を遅延させる遅延器203を備えた構成とした。
本実施形態による増幅装置200は、制御部250の構成が第1の実施形態の増幅装置100と異なる。ここで、制御部250は位相制御部(AM−PM)260、第1の振幅制御部(AM−AM1)270、および第2の振幅制御部(AM−AM2)280を備える。そして制御部250はルックアップ・テーブル(LUT)を用いて第1のプリディストータ部130および第2のプリディストータ部140をそれぞれ制御する構成とした。
すなわち、位相制御部(AM−PM)260は第1のプリディストータ部130の位相補償量を定める位相係数が記録された第1のルックアップ・テーブル263を備える。第1の振幅制御部(AM−AM1)270は第1のプリディストータ部130の振幅調整量を定める第1の振幅係数が記録された第2のルックアップ・テーブル273を備える。そして第2の振幅制御部(AM−AM2)280は第2のプリディストータ部140の動作を定める第2の振幅係数が記録された第3のルックアップ・テーブル283を備える構成とした。
以下では、ベースバンド信号をアップコンバートして送信する送信装置に増幅装置200を用いる場合を例として説明する。この場合、第1のプリディストータ部130と電力増幅器(PA)110との間にアップコンバータ301を配置し、電力増幅器(PA)110の出力と制御部250との間にダウンコンバータ302を配置した構成とすることができる。
図7に、制御部250の構成をさらに詳細に示す。位相制御部(AM−PM)260は位相係数算出部262と第1のルックアップ・テーブル263を備える。第1の振幅制御部270はシェーピング関数演算部271、第1の振幅係数算出部272、および第2のルックアップ・テーブル273を備える。そして第2の振幅制御部(AM−AM2)280は第2の振幅係数算出部282と第3のルックアップ・テーブル283を備える。これらに加えて制御部250は、入力信号のスケーリングと振幅位相分離を行う入力信号処理部251、出力信号のスケーリングと振幅位相分離を行う出力信号処理部252、および切替制御部290を有する。切替制御部290は、第1の振幅制御部270の動作状態と第2の振幅制御部280の動作状態を切り替える。
次に、本実施形態による増幅装置200の動作を図6から図10を用いて詳細に説明する。図6に示すように、ベースバンドからの入力信号S10は第1のプリディストータ部130で変調された後に、アップコンバータ301でアップコンバートされ電力増幅器(PA)110に入力される。電力増幅器(PA)110で増幅された出力信号S12はアンテナを介して送信される。出力信号S12の一部はカプラ等によって減衰され、ダウンコンバータ302でダウンコンバートされた後に制御部250に入力される。
一方、ベースバンドからの入力信号S10の一部は包絡線検波器(エンベロープディテクタ、図示せず)などに入力され、入力信号S10から振幅情報S20が抽出される。第2のプリディストータ部140は振幅情報S20と第2の振幅係数に基づいて電源電圧変調部120の制御を行う。電源電圧変調部120は電力増幅器110の電源電圧を変調する。
遅延器203は入力信号S10を遅延させることにより、制御部250に入力する入力信号(x(t+τ))と出力信号(y(t))を同期させる。遅延器203における遅延量τは、入出力信号の相関係数を計算することによって算出される。
制御部250は同期した入力信号と出力信号を用いて各係数を算出し、各ルックアップ・テーブルの値を更新する。具体的には、図7に示すように、位相係数算出部262は位相係数を算出し第1のルックアップ・テーブル263の値を更新する。第1の振幅係数算出部272は第1の振幅係数を算出し第2のルックアップ・テーブル273の値を更新する。また、第2の振幅係数算出部282は第2の振幅係数を算出し第3のルックアップ・テーブル283の値を更新する。
切替制御部290は、第1の振幅係数算出部272の出力値が所定の閾値を下回ったとき、第1の振幅制御部(AM−AM1)270の動作状態と第2の振幅制御部(AM−AM2)280の動作状態を切り替える。つまり、第1の振幅制御部(AM−AM1)270を停止(OFF)状態とし、第2の振幅制御部(AM−AM2)280を動作(ON)状態とする。
位相制御部(AM−PM)260は、第1のルックアップ・テーブル263に記録された位相係数によって第1のプリディストータ部130の位相補償量を定める。第1の振幅制御部(AM−AM1)270は、第2のルックアップ・テーブル273に記録された第1の振幅係数によって第1のプリディストータ部130の振幅調整量を定める。また第2の振幅制御部(AM−AM2)280は、第3のルックアップ・テーブル283に記録された第2の振幅係数によって第2のプリディストータ部140の動作を定める。
次に、制御部250において各ルックアップ・テーブルに記録される各係数を算出する手順について説明する。図8は制御部250の構成の一部を示すブロック図であり、第1のプリディストータ部130を制御する場合に対応する。図9は制御部250の構成の別の一部を示すブロック図であり、第2のプリディストータ部140を制御する場合に対応する。また図10は、制御部250の動作を説明するためのシーケンス図である。
まず、制御部250は、位相制御部(AM−PM)260、第1の振幅制御部(AM−AM1)270、および第2の振幅制御部(AM−AM2)280における、それぞれの係数を初期化する。すなわち、位相制御部(AM−PM)260においては、第1のルックアップ・テーブル(LUT)263に記録された位相係数の値を初期化する(図10のステップS201)。第1の振幅制御部(AM−AM1)270では、第2のルックアップ・テーブル(LUT)273に記録された位相係数の値を初期化し、シェーピング関数演算部271に所定のシェーピング関数を設定する(ステップS202)。また、第2の振幅制御部(AM−AM2)280では、第3のルックアップ・テーブル(LUT)283に第2の振幅係数の初期値を設定する(ステップS203)。このときの初期値は、第2のプリディストータ部140の制御によって定まる電力増幅器110の動作状態において、電力増幅器110の出力が飽和状態とならないように設定する。
次に、図8と図10を参照して、第1のプリディストータ部130の動作を制御する第1のルックアップ・テーブル263および第2のルックアップ・テーブル273の各係数を更新する手順を説明する(図10の手順1)。
図8に示すように、制御部250は入力信号処理部251と出力信号処理部252を備える。入力信号処理部251と出力信号処理部252は、ある一定時間のベースバンドの入力信号および出力信号のデータ列それぞれにおいて、振幅の最大値が1となるように振幅のスケーリングを行う。スケーリングを行った後に振幅成分(r)と位相成分(θ)をそれぞれ分離して出力する。
位相係数算出部262は、入力信号における位相の値(θx(t+τ))と出力信号における位相の値(θy(t))から、両者の位相誤差が最小となるようにLMS(Least Mean Square:最小平均二乗)アルゴリズムを用いた演算を行う。そして、このときの位相係数の更新値(Δθ)により第1のルックアップ・テーブル263に記録された位相係数を更新する(ステップS204)。
一方、振幅成分(r)に関しては、まず、シェーピング関数演算部271が入力信号(rx(t+τ))に凸形状の入出力特性を有するシェーピング関数を作用させ、入力変調信号(rx’(t+τ))として第1の振幅係数算出部272に出力する。第1の振幅係数算出部272は、入力変調信号(rx’(t+τ))と出力信号の振幅成分(ry(t))との振幅誤差が最小となるようにLMSアルゴリズムを用いた演算を行う。そして、このときの第1の振幅係数の更新値(Δr)により第2のルックアップ・テーブル273に記録された第1の振幅係数を更新する(ステップS205)。
ここでシェーピング関数は、第1の実施形態で用いた図5Aに示すような、y=xの直線に対して上に凸形状(図中のy=f(x))となる関数を用いた。すなわち、入力x、出力yの範囲をいずれも0以上1以下としたとき([0,1]→[0,1])、入出力の最小値の組(0,0)と最大値の組(1,1)を結んだ直線(図5Aのy=xの直線)より常に上側になる曲線(図5Aのy=f(x))を表わす関数を用いた。この条件を数式で表わすと、シェーピング関数fは、
f(0)=0、f(1)=1
f(a)>a(0<a<1)
を満たす関数である。具体的には例えば、シェーピング関数としてy=sin(πx/2)を用いることができる。
上述した各係数の更新は、具体的には例えば以下のように行うことができる。まず、位相係数算出部262および第1の振幅係数算出部272は、制御部250の入力信号(x(t+τ))の振幅に対応して各ルックアップ・テーブルのアドレス値pを算出する。そして、更新値ΔθおよびΔrをそれぞれ対応する第1のルックアップ・テーブル263および第2のルックアップ・テーブル273のp番地の値に足しこむことにより各ルックアップ・テーブルの値を更新する。
位相係数の更新を繰り返すことによって、増幅装置200の入力信号と出力信号の位相誤差が最小となる位相係数である位相補正値を算出する(ステップS206)。また、第1の振幅係数の更新を繰り返すことによって、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出する(ステップS207)。このとき、シェーピング後の入力変調信号(rx’(t+τ))と出力信号(ry(t))は線形な関係になる。ただし、シェーピングを行う前の入力信号(rx(t+τ))に対しては出力信号(ry(t))は線形な関係にはなく、この時点では出力信号は歪んだ状態のままである。
切替制御部290は、第1の振幅係数算出部272が出力する第1の振幅係数の更新値(Δr)が収束したかどうかを判定する。収束したと判定した場合、第1の振幅係数算出部272の動作を停止(OFF)状態とし(ステップS208)、第2の振幅係数算出部282を動作(ON)状態とする(ステップS209)。つまり、図10における手順1から手順2への移行を行う。このとき第1の振幅補正値は一定となり、第1の振幅補正値に基づいて定まる第1のプリディストータ部130の入出力振幅特性は固定される(ステップS210)。収束の判定は例えば、更新値の絶対値(|Δr|)のN回平均値が、閾値βを下回ったときに収束したとみなすことにより行うことができる。ここで、Nおよびβはあらかじめ与えられるパラメータである。
以上説明した手順1により、増幅装置200の入力振幅に対する出力位相の特性(AM−PM特性)は、入力信号と出力信号の位相誤差が最小となるように最適化される。また、入力振幅に対する出力振幅の特性(AM−AM特性)は、シェーピング関数と同様の特性曲線を示すことになる。つまり、手順1の終了時点においては、AM−AM特性は歪んだ状態のままである。また、手順1では電源電圧に関しては最適化処理が施されていないため、増幅装置の効率動作の点では最適動作状態とはなっていない。
上述した第1の振幅補正値の算出において、あらかじめ定められた時間(τ1)を経過した後においてもLMSアルゴリズムが収束しなかった場合は、シェーピング関数をより線形に近い関数に変更し、初期化から再度処理を行うこととしてもよい。具体的には、従前のシェーピング関数y=f(x)に対して、例えば関数y=(x+f(x))/2を新たなシェーピング関数として用いることができる。
なお、第2の振幅係数算出部282が動作(ON)状態となった後に、第2の振幅制御部(AM−AM2)280は第2のプリディストータ部140を制御することによって、電力増幅器110の出力が飽和する直前の状態とすることが望ましい。ここで電力増幅器110の入出力特性が飽和するのは、電力増幅器110の出力振幅と電力増幅器110の電源電圧がほぼ同等になる場合である。以下に、この場合の具体的な制御手法の一例を説明する。
図11は、電力増幅器110に供給する電源電圧の制御手法を説明するための図であり、横軸は時間、縦軸は電圧である。第2の振幅制御部(AM−AM2)280における第2の振幅係数の初期値によって、電源電圧変調部120は電力増幅器110に初期電源電圧Vdd0(t)を供給する。この初期電源電圧Vdd0(t)は、電力増幅器110の出力信号の振幅v(t)に対して、あらかじめ指定された十分大きな正のオフセットv0を有するように設定する。すなわち、Vdd0(t)=v(t)+v0である。
上述した手順1における第1の振幅係数の最適化が終了した後、電源電圧変調部120を制御することにより電源電圧の電圧オフセットv0の値を下げていく。このとき例えば、入力信号に対する出力信号の比である増幅率(ゲイン)をモニタし、電圧オフセットv0の下げ幅に対してゲインの減少値があらかじめ設定された閾値を越えたときに、電圧オフセット値の更新を停止する。このときのオフセット値をv1とすると、電源電圧はv(t)+v1となる。このようにして、電力増幅器110の出力が飽和する直前の状態に電源電圧を設定することができる。
次に、図9と図10を参照して、第2のプリディストータ部140の動作を制御する第3のルックアップ・テーブル283に記録された第2の振幅係数を更新する手順を説明する(図10の手順2)。なお、位相制御部(AM−PM)260は手順1における場合と同じ動作を行うので、説明を省略する。
図9は制御部250の構成の一部を示すブロック図であり、第2のプリディストータ部140を制御する場合に対応する。第2の振幅係数算出部282は、第2の振幅係数の更新値(Δh)により第3のルックアップ・テーブル(LUT)283に記録された第2の振幅係数を更新する(ステップS211)。このとき第2の振幅係数算出部282は、手順1の終了時点において歪んだ状態にあるAM−AM特性が線形に近づくように第2の振幅係数を更新する。すなわち、AM−AM特性が線形関係にない入力振幅に対して、対応する電源電圧を減衰させることによって電力増幅器110を出力飽和状態とし、それにより出力振幅が減少するように制御する。
具体的には例えば、入力振幅rx(t)に対応する第3のルックアップ・テーブル(LUT)283の値を、線形からの差分値(ry(t)−rx(t))に比例して減少させることによって、電力増幅器110を出力飽和状態とすることができる。すなわち、rx(t)に対応する更新値(Δh(t))を
Δh(t)=−α(ry(t)−rx(t))
によって定める。ただし、αはあらかじめ与えられた値である。第2の振幅係数の更新は例えば、入力信号(x(t+τ))の振幅に対応したアドレス値を算出し、第3のルックアップ・テーブル(LUT)283の対応するアドレス値の値に更新値Δhを足しこむことによって行うことができる。
このようにして第2の振幅係数の更新を繰り返すことにより、電力増幅器110の各出力振幅において飽和状態とすることができる。その結果、各入力振幅において対応する出力振幅が減衰するので、手順1の終了時点において凸形状の入出力特性を有していたAM−AM特性を線形特性へと近づけることが可能となる。そして入力信号の振幅の全範囲において、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出する(ステップS212)。これにより、電力増幅器110の入出力特性が飽和する領域を利用した高効率の増幅動作に加えて、振幅成分と位相成分の両方が補正された低歪みの出力信号が得られる。
以上説明したように、本実施形態の増幅装置200においては、第2の振幅制御部280が第2のプリディストータ部140を制御することによって、電力増幅器110は高効率で動作する。そして第1の振幅制御部270は、この動作状態における電力増幅器110の歪み特性を補償する変調信号を第1のプリディストータ部130が出力するように制御する。さらに、位相制御部(AM−PM)260は入力信号と出力信号の位相誤差が最小となるように常に第1のプリディストータ部130を制御する。このような構成とすることにより、本実施形態によれば、電力増幅器110が飽和領域で高効率な動作をしている状態において、入出力信号の振幅誤差および位相誤差を共に補償することが可能となる。
また、本実施形態による第2のプリディストータ部140の最適化は第2の振幅係数を減少させることによって行うため、計算量が少なくアルゴリズムの収束が早い。よって、本実施形態によれば、増幅装置の最適化を迅速に行うことができるという効果が得られる。さらに、本実施形態によれば、電力増幅器は飽和領域で動作していることから、関連する増幅装置よりも高効率な動作が可能である。
なお、第3のルックアップ・テーブル(LUT)283の係数の更新方法は上述した方法に限らず、例えばルックアップ・テーブルの連続性を保つために近接するアドレスの係数に関しても同時に低減するなど、その他の線形化手法を用いることができる。
上述した第2の振幅係数の更新操作を、増幅装置200の歪みがあらかじめ設定した規格値を満たすまで繰り返すこととしてもよい。例えば、隣接チャネル漏洩電力比(Adjacent−Channel Power Ratio:ACPR)が−40dB以下となるまで繰り返すことができる。
上述した第2の振幅補正値の算出において、あらかじめ定められた時間(τ2)を経過した後においても歪みが所定の規格値を満たさない場合は、出力飽和による歪みの影響が大きいと考えられる。そこで、出力飽和を緩和するようにシェーピング関数をより線形に近い関数に変更し、初期化から再度処理を行うこととしてもよい。この場合も手順1における場合と同様に、従前のシェーピング関数y=f(x)に対して、例えば関数y=(x+f(x))/2を新たなシェーピング関数として用いることができる。
本実施形態では、プリディストータとしてルックアップ・テーブル(LUT)方式を用いた場合について説明した。しかし、これに限らず、歪みの補正量を多項式で近似する方式、または複素信号による計算処理を行う方式によるプリディストータを用いることとしてもよい。
以上の説明では、増幅装置200は、電力増幅器110、電源電圧変調部120、第1のプリディストータ部130、第2のプリディストータ部140、および制御部250を有する構成とした。ここで、第1のプリディストータ部130と、第2のプリディストータ部140と、制御部250とが電力増幅器の制御装置を構成することとしてもよい。この場合においても、電力増幅器の制御装置と電源電圧変調部120と電力増幅器110を備えた構成によって、本実施形態の増幅装置200と同一の効果を得ることができる。電力増幅器の制御装置は例えば、フィールド・プログラマブル・ゲート・アレイ(FPGA)などによって実装することができる。
本発明は上記実施形態に限定されることなく、特許請求の範囲に記載した発明の範囲内で、種々の変形が可能であり、それらも本発明の範囲内に含まれるものであることはいうまでもない。
この出願は、2010年12月20日に出願された日本出願特願2010−283133を基礎とする優先権を主張し、その開示の全てをここに取り込む。
〔第1の実施形態〕
図1は、本発明の第1の実施形態に係る増幅装置100の構成を示すブロック図である。増幅装置100はエンベロープトラッキング方式の増幅装置であり、電力増幅器(PA)110と、電力増幅器110の電源電圧を変調する電源電圧変調部120を有する。さらに、電力増幅器110の前段に配置された第1のプリディストータ部130、電源電圧変調部120の前段に配置された第2のプリディストータ部140、および制御部150を有する。第1のプリディストータ部130は、入力信号S10に対して位相補償量および振幅調整量を付加した変調信号S11を電力増幅器(PA)110に出力する。第2のプリディストータ部140は、増幅装置100の入力信号の振幅情報S20を入力側から取得し、振幅情報S20に基づいて電源電圧変調部120の制御を行う。制御部150は、第1のプリディストータ部130と第2のプリディストータ部140の動作を制御する。ここで、電力増幅器110は第1のプリディストータ部130から変調信号S11を入力し、変調信号S11を増幅した出力信号S12を出力する。
制御部150は、位相制御部(AM−PM)160、第1の振幅制御部(AM−AM1)170、および第2の振幅制御部(AM−AM2)180を備える。位相制御部(AM−PM)160は第1のプリディストータ部130の位相補償量を位相係数P10によって制御する。ここで位相補償量とは、入力振幅に対する出力位相の特性(AM−PM特性)における非線形性による歪みを補償する位相量を言う。
第1の振幅制御部(AM−AM1)170は第1のプリディストータ部130の振幅調整量を第1の振幅係数P11によって制御する。第2の振幅制御部(AM−AM2)180は第2のプリディストータ部140の動作を第2の振幅係数P12によって制御する。ここで、第1の振幅制御部170と第2の振幅制御部180は連動して、増幅装置100の入力信号S10の振幅に対する出力信号S12の振幅の比である振幅増幅率が一定となるように制御する。このとき、入力振幅に対する出力振幅の特性(AM−AM特性)は線形関係となるので、増幅装置100の振幅特性における非線形性による歪みは補償される。
このように、本実施形態の増幅装置100においては、第1の振幅制御部170と第2の振幅制御部180が連動して増幅装置100の振幅特性における歪みを補償する。すなわち、第2の振幅制御部180は第2のプリディストータ部140を制御することによって電力増幅器110を高効率で動作させる。そして第1の振幅制御部170は、この動作状態における電力増幅器110の歪み特性を補償する変調信号を第1のプリディストータ部130が出力するように制御する。以上より、本実施形態の増幅装置100によれば、低歪み特性と高効率動作を同時に実現することができる。
図1では、第2のプリディストータ部140は入力信号の振幅情報S20を入力信号S10とは別に入力側から取得する場合について示した。しかし、これに限らず、第2のプリディストータ部140が包絡線検波器(エンベロープディテクタ)を介して入力信号S10から振幅情報を取得することとしてもよい。
次に、本実施形態による増幅装置100の制御部150について、さらに詳細に説明する。位相制御部(AM−PM)160は、入力信号と出力信号の位相誤差が最小となるときの位相係数を位相補正値として算出し、位相補正値に基づいて第1のプリディストータ部130の位相補償量を制御する。
第1の振幅制御部(AM−AM1)170は、図2Aに示すように、振幅増幅率が入力信号の振幅の全範囲において、入力信号の振幅が最大であるときの振幅増幅率である基準振幅増幅率kと等しいか又はこれを上回るように制御する。このとき、入力振幅に対する出力振幅の特性は、図2Bに示すように、全ての入力振幅範囲において出力振幅が傾きk(=基準振幅増幅率)の直線と等しいか又はこれを上回る値をとる。そして第1の振幅制御部(AM−AM1)170は、このときの第1の振幅係数を第1の振幅補正値として算出し、第1の振幅補正値に基づいて第1のプリディストータ部130の振幅調整量を制御する。
第2の振幅制御部(AM−AM2)180は、第1の振幅補正値が一定である条件の下で、入力信号の振幅の全範囲において振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出する。そして、第2の振幅補正値に基づいて第2のプリディストータ部140の動作を制御する。
ここで制御部150が、図3に示すように、切替判定部190と切替部191をさらに有し、第1の振幅制御部170がシェーピング関数演算部171と第1の振幅係数算出部172とを備える構成とすることができる。シェーピング関数演算部171は、シェーピング関数を入力信号に作用させた入力変調信号S13を第1の振幅係数算出部172に出力する。ここでシェーピング関数は、全ての入力値に対して、入力値と等しいか又はこれを上回る出力値をとる関数である。以下では、入出力特性が凸形状であるシェーピング関数を例として説明するが、これに限られない。第1の振幅係数算出部172は、入力変調信号S13と出力信号S12の振幅誤差を最小にする第1の振幅係数を第1の振幅補正値として算出する。このとき、第1の振幅制御部170は第1の振幅補正値に基づいて第1のプリディストータ部130の振幅調整量を制御する。これにより第1のプリディストータ部130は、増幅装置100の入出力振幅特性がシェーピング関数により定まる凸形状となるような変調信号S11を出力する。
切替判定部190は第1の振幅係数算出部172から入力変調信号S13と出力信号S12の振幅誤差を示す振幅誤差情報S14を取得し、振幅誤差情報S14に基づいて切替判定を行う。切替部191は切替判定の結果に基づいて、第1の振幅制御部170の動作状態と第2の振幅制御部180の動作状態を切り替える。具体的には例えば、振幅誤差が所定の閾値を超えたと判断したとき、切替判定部190は切替部191に切替指示信号S15を出力する。そして切替部191は切替指示信号S15を受信したときに、第1の振幅制御部170の動作状態と第2の振幅制御部180の動作状態を切り替えることとすることができる。
第2の振幅制御部180は第2のプリディストータ部140を介して電源電圧変調部120を制御する。このとき電源電圧変調部120は、入力振幅の全範囲において電力増幅器110の各出力が飽和状態となるように電源電圧を制御する。具体的には電力増幅器110の出力が飽和状態となるまで、電源電圧の振幅を低減させる。すなわち第2の振幅制御部180は、電力増幅器110の出力が飽和状態となる電源電圧を電源電圧変調部120が供給するときの第2の振幅係数を第2の振幅補正値として算出し、第2の振幅補正値に基づいて第2のプリディストータ部140の動作を制御する。
ここで、電力増幅器110には上述したように、第1のプリディストータ部130から凸形状の入出力振幅特性を有する変調信号S11が入力される。電力増幅器110の出力が飽和状態となると出力信号S12の振幅は減少するので、電源電圧を上述の構成によって制御することにより、入力信号S10の振幅に対する出力信号S12の振幅の比である振幅増幅率を一定とすることができる。
このように、本実施形態による増幅装置100は、第1の振幅制御部170と第2の振幅制御部180は連動して、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率を一定に制御する構成としている。そのため、電力増幅器110が飽和領域で高効率な動作をしている状態で、入力振幅に対する出力振幅の非線形性による歪みを補償することが可能となる。
次に、本実施形態による増幅装置100の動作を説明する。図4は、増幅装置100の動作を説明するためのシーケンス図である。まず制御部150は、位相制御部(AM−PM)160、第1の振幅制御部170、および第2の振幅制御部(AM−AM2)180における、それぞれの係数を初期化する(ステップS101)。
第1段階において、制御部150は位相制御部(AM−PM)160で算出される位相係数と、第1の振幅制御部170で算出される第1の振幅係数を用いて、第1のプリディストータ部130の動作を制御する。すなわち、位相係数は第1のプリディストータ部130における入力信号に対する位相補償量を決定し、第1の振幅係数は入力信号に対する振幅調整量を決定する。
位相制御部(AM−PM)160は、増幅装置100の入力信号および出力信号を同期させ、同期した入力信号と出力信号の位相誤差が最小となるように位相係数を更新する(ステップS102)。そして、位相誤差を最小にする位相係数である位相補正値を算出する(ステップS103)。この位相補正値によって第1のプリディストータ部130の位相補償量を決定する。このとき、位相補正値の算出には例えば、LMS(Least Mean Square:最小平均二乗)アルゴリズムを用いることができる。
第1の振幅制御部(AM−AM1)170は、増幅装置100の入力信号にシェーピング関数を作用させることによって入力変調信号を作成し、入力変調信号と出力信号を同期させる。同期した入力変調信号と出力信号の振幅誤差が最小となるように第1の振幅係数を更新する(ステップS104)。そして、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出する(ステップS105)。この第1の振幅補正値を用いて、増幅装置100の入出力特性がシェーピング関数と同一となるように第1のプリディストータ部130の振幅調整量を制御する。このとき、第1の振幅補正値の算出にもLMSアルゴリズムを用いることができる。ここで本実施形態では、シェーピング関数として図5Aに示すようなy=xの直線に対して上に凸形状(図中のy=f(x))となる関数を用いた。しかし、これに限らず図5Bに示すように、全ての入力xに対して出力yが、y≧xの条件を満たす関数(図中のy=g(x))であればシェーピング関数として用いることができる。
切替判定部190は第1の振幅制御部(AM−AM1)170における振幅誤差が、例えば最小となったと判断したときに、切替部191に切替指示信号を出力する。そして切替部191は切替指示信号を受信したときに、第1の振幅制御部(AM−AM1)170の動作状態と第2の振幅制御部(AM−AM2)180の動作状態を切り替える。すなわち、第1の振幅制御部(AM−AM1)170を停止状態(OFF)とし(ステップS106)、第2の振幅制御部(AM−AM2)180を動作状態(ON)とする(ステップS107)。したがって第1の振幅補正値は一定となり、第1の振幅補正値に基づいて定まる第1のプリディストータ部130の入出力振幅特性は固定される(ステップS108)。なお切替判定部190は、入力変調信号と出力信号の振幅誤差の値、例えば振幅誤差の平均値が予め指定された閾値を超えたときに、振幅誤差が最小となったと判断するように構成することができる。
続く第2段階において、第2の振幅制御部(AM−AM2)180は第2の振幅係数を更新して第2のプリディストータ部140の動作を制御する。つまり第2のプリディストータ部140は、第2の振幅係数に基づいて電源電圧変調部120を制御し、電力増幅器110の電源電圧の振幅を決定する。具体的には、第2の振幅制御部(AM−AM2)180は、電源電圧の振幅を低減し電力増幅器110が出力飽和状態となる電源電圧を、電源電圧変調部120が供給するように第2の振幅係数を更新する(ステップS109)。このとき、電力増幅器110が出力飽和状態となると出力信号の振幅は減少する。そのため、第1段階の終了時点において凸形状の入出力振幅特性を有する出力信号を、最終的には、入力信号の振幅に対する出力信号の振幅の比が一定となる線形な入出力振幅特性とすることができる。第2の振幅制御部(AM−AM2)180は、このときの第2の振幅係数を第2の振幅補正値として算出し(ステップS110)、第2の振幅補正値に基づいて第2のプリディストータ部140の動作を制御する。
また第2段階においても、位相制御部(AM−PM)160は入力信号と出力信号の位相誤差が最小となるように位相係数を更新し(ステップS111)、位相誤差を最小にする位相係数である位相補正値を算出する(ステップS112)。
以上説明したように、本実施形態の増幅装置100においては、第2の振幅制御部180が第2のプリディストータ部140を制御することによって、電力増幅器110は高効率で動作する。そして第1の振幅制御部170は、この動作状態における電力増幅器110の歪み特性を補償する変調信号を第1のプリディストータ部130が出力するように制御する。さらに、位相制御部(AM−PM)160は入力信号と出力信号の位相誤差が最小となるように常に第1のプリディストータ部130を制御する。このような構成とすることにより、本実施形態によれば、電力増幅器110が飽和領域で高効率な動作をしている状態において、入出力信号の振幅誤差および位相誤差を共に補償することが可能となる。
以上の説明では、増幅装置100は、電力増幅器110、電源電圧変調部120、第1のプリディストータ部130、第2のプリディストータ部140、および制御部150を有する構成とした。ここで、第1のプリディストータ部130と、第2のプリディストータ部140と、制御部150とが電力増幅器の制御装置を構成することとしてもよい。この場合においても、電力増幅器の制御装置と電源電圧変調部120と電力増幅器110を備えた構成によって、本実施形態の増幅装置100と同一の効果を得ることができる。電力増幅器の制御装置は例えば、特定用途向け集積回路(Application Specific Integrated Circuit:ASIC)によって実装することができる。
また、上述の各ステップをコンピュータに実行させることとしてもよい。すなわち、コンピュータに、増幅装置の入力信号と出力信号の位相誤差が最小となるように、入力信号に対する位相補償量を決定する位相係数を更新する手順と、位相誤差を最小にする位相係数である位相補正値を算出する手順と、入力信号に、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとる関数を作用させることによって入力変調信号を作成する手順と、入力変調信号と出力信号の振幅誤差が最小となるように、入力信号に対する振幅調整量を決定する第1の振幅係数を更新する手順と、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出する手順と、第1の振幅補正値を一定とした状態で、増幅装置を構成する電力増幅器が出力飽和状態となる電源電圧を供給するように、入力信号の振幅情報に基づいて、電力増幅器の電源電圧の振幅を決定する第2の振幅係数を更新する手順と、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出する手順と、位相補正値を用いて、入力信号と出力信号との間における位相誤差を補償し、第1の振幅補正値と第2の振幅補正値とを用いて、振幅増幅率を一定に制御する手順、を実行させることができる。この場合、コンピュータとしてプログラム可能な論理演算回路(論理ブロック)を用いることができ、例えば、かかる論理ブロックを備えたフィールド・プログラマブル・ゲート・アレイ(Field Programmable Gate Array:FPGA)などによって実装することができる。
〔第2の実施形態〕
次に、本発明の第2の実施形態について説明する。図6は、本実施形態に係る増幅装置200の構成を示すブロック図である。増幅装置200はエンベロープトラッキング方式の増幅装置であり、電力増幅器(PA)110と、電力増幅器110の電源電圧を変調する電源電圧変調部120を有する。さらに、電力増幅器110の前段に配置された第1のプリディストータ部130、電源電圧変調部120の前段に配置された第2のプリディストータ部140、および制御部250を有する。
第1のプリディストータ部130は、入力信号S10に対して位相補償量および振幅調整量を付加した変調信号S11を電力増幅器(PA)110に出力する。第2のプリディストータ部140は、増幅装置200の入力信号の振幅情報S20を入力側から取得し、振幅情報S20に基づいて電源電圧変調部120の制御を行う。制御部250は、第1のプリディストータ部130と第2のプリディストータ部140の動作を制御する。ここで、電力増幅器110は第1のプリディストータ部130から変調信号S11を入力し、変調信号S11を増幅した出力信号S12を出力する。ここまでの構成は、第1の実施形態による増幅装置100の構成と同様である。
なお図6では、第2のプリディストータ部140が包絡線検波器(エンベロープディテクタ、図示せず)などを介して入力信号S10から振幅情報S20を取得する構成を示した。また、増幅装置200では、増幅装置200の入力信号および出力信号を同期させるため、制御部250の前段に入力信号を遅延させる遅延器203を備えた構成とした。
本実施形態による増幅装置200は、制御部250の構成が第1の実施形態の増幅装置100と異なる。ここで、制御部250は位相制御部(AM−PM)260、第1の振幅制御部(AM−AM1)270、および第2の振幅制御部(AM−AM2)280を備える。そして制御部250はルックアップ・テーブル(LUT)を用いて第1のプリディストータ部130および第2のプリディストータ部140をそれぞれ制御する構成とした。
すなわち、位相制御部(AM−PM)260は第1のプリディストータ部130の位相補償量を定める位相係数が記録された第1のルックアップ・テーブル263を備える。第1の振幅制御部(AM−AM1)270は第1のプリディストータ部130の振幅調整量を定める第1の振幅係数が記録された第2のルックアップ・テーブル273を備える。そして第2の振幅制御部(AM−AM2)280は第2のプリディストータ部140の動作を定める第2の振幅係数が記録された第3のルックアップ・テーブル283を備える構成とした。
以下では、ベースバンド信号をアップコンバートして送信する送信装置に増幅装置200を用いる場合を例として説明する。この場合、第1のプリディストータ部130と電力増幅器(PA)110との間にアップコンバータ301を配置し、電力増幅器(PA)110の出力と制御部250との間にダウンコンバータ302を配置した構成とすることができる。
図7に、制御部250の構成をさらに詳細に示す。位相制御部(AM−PM)260は位相係数算出部262と第1のルックアップ・テーブル263を備える。第1の振幅制御部270はシェーピング関数演算部271、第1の振幅係数算出部272、および第2のルックアップ・テーブル273を備える。そして第2の振幅制御部(AM−AM2)280は第2の振幅係数算出部282と第3のルックアップ・テーブル283を備える。これらに加えて制御部250は、入力信号のスケーリングと振幅位相分離を行う入力信号処理部251、出力信号のスケーリングと振幅位相分離を行う出力信号処理部252、および切替制御部290を有する。切替制御部290は、第1の振幅制御部270の動作状態と第2の振幅制御部280の動作状態を切り替える。
次に、本実施形態による増幅装置200の動作を図6から図10を用いて詳細に説明する。図6に示すように、ベースバンドからの入力信号S10は第1のプリディストータ部130で変調された後に、アップコンバータ301でアップコンバートされ電力増幅器(PA)110に入力される。電力増幅器(PA)110で増幅された出力信号S12はアンテナを介して送信される。出力信号S12の一部はカプラ等によって減衰され、ダウンコンバータ302でダウンコンバートされた後に制御部250に入力される。
一方、ベースバンドからの入力信号S10の一部は包絡線検波器(エンベロープディテクタ、図示せず)などに入力され、入力信号S10から振幅情報S20が抽出される。第2のプリディストータ部140は振幅情報S20と第2の振幅係数に基づいて電源電圧変調部120の制御を行う。電源電圧変調部120は電力増幅器110の電源電圧を変調する。
遅延器203は入力信号S10を遅延させることにより、制御部250に入力する入力信号(x(t+τ))と出力信号(y(t))を同期させる。遅延器203における遅延量τは、入出力信号の相関係数を計算することによって算出される。
制御部250は同期した入力信号と出力信号を用いて各係数を算出し、各ルックアップ・テーブルの値を更新する。具体的には、図7に示すように、位相係数算出部262は位相係数を算出し第1のルックアップ・テーブル263の値を更新する。第1の振幅係数算出部272は第1の振幅係数を算出し第2のルックアップ・テーブル273の値を更新する。また、第2の振幅係数算出部282は第2の振幅係数を算出し第3のルックアップ・テーブル283の値を更新する。
切替制御部290は、第1の振幅係数算出部272の出力値が所定の閾値を下回ったとき、第1の振幅制御部(AM−AM1)270の動作状態と第2の振幅制御部(AM−AM2)280の動作状態を切り替える。つまり、第1の振幅制御部(AM−AM1)270を停止(OFF)状態とし、第2の振幅制御部(AM−AM2)280を動作(ON)状態とする。
位相制御部(AM−PM)260は、第1のルックアップ・テーブル263に記録された位相係数によって第1のプリディストータ部130の位相補償量を定める。第1の振幅制御部(AM−AM1)270は、第2のルックアップ・テーブル273に記録された第1の振幅係数によって第1のプリディストータ部130の振幅調整量を定める。また第2の振幅制御部(AM−AM2)280は、第3のルックアップ・テーブル283に記録された第2の振幅係数によって第2のプリディストータ部140の動作を定める。
次に、制御部250において各ルックアップ・テーブルに記録される各係数を算出する手順について説明する。図8は制御部250の構成の一部を示すブロック図であり、第1のプリディストータ部130を制御する場合に対応する。図9は制御部250の構成の別の一部を示すブロック図であり、第2のプリディストータ部140を制御する場合に対応する。また図10は、制御部250の動作を説明するためのシーケンス図である。
まず、制御部250は、位相制御部(AM−PM)260、第1の振幅制御部(AM−AM1)270、および第2の振幅制御部(AM−AM2)280における、それぞれの係数を初期化する。すなわち、位相制御部(AM−PM)260においては、第1のルックアップ・テーブル(LUT)263に記録された位相係数の値を初期化する(図10のステップS201)。第1の振幅制御部(AM−AM1)270では、第2のルックアップ・テーブル(LUT)273に記録された位相係数の値を初期化し、シェーピング関数演算部271に所定のシェーピング関数を設定する(ステップS202)。また、第2の振幅制御部(AM−AM2)280では、第3のルックアップ・テーブル(LUT)283に第2の振幅係数の初期値を設定する(ステップS203)。このときの初期値は、第2のプリディストータ部140の制御によって定まる電力増幅器110の動作状態において、電力増幅器110の出力が飽和状態とならないように設定する。
次に、図8と図10を参照して、第1のプリディストータ部130の動作を制御する第1のルックアップ・テーブル263および第2のルックアップ・テーブル273の各係数を更新する手順を説明する(図10の手順1)。
図8に示すように、制御部250は入力信号処理部251と出力信号処理部252を備える。入力信号処理部251と出力信号処理部252は、ある一定時間のベースバンドの入力信号および出力信号のデータ列それぞれにおいて、振幅の最大値が1となるように振幅のスケーリングを行う。スケーリングを行った後に振幅成分(r)と位相成分(θ)をそれぞれ分離して出力する。
位相係数算出部262は、入力信号における位相の値(θx(t+τ))と出力信号における位相の値(θy(t))から、両者の位相誤差が最小となるようにLMS(Least Mean Square:最小平均二乗)アルゴリズムを用いた演算を行う。そして、このときの位相係数の更新値(Δθ)により第1のルックアップ・テーブル263に記録された位相係数を更新する(ステップS204)。
一方、振幅成分(r)に関しては、まず、シェーピング関数演算部271が入力信号(rx(t+τ))に凸形状の入出力特性を有するシェーピング関数を作用させ、入力変調信号(rx’(t+τ))として第1の振幅係数算出部272に出力する。第1の振幅係数算出部272は、入力変調信号(rx’(t+τ))と出力信号の振幅成分(ry(t))との振幅誤差が最小となるようにLMSアルゴリズムを用いた演算を行う。そして、このときの第1の振幅係数の更新値(Δr)により第2のルックアップ・テーブル273に記録された第1の振幅係数を更新する(ステップS205)。
ここでシェーピング関数は、第1の実施形態で用いた図5Aに示すような、y=xの直線に対して上に凸形状(図中のy=f(x))となる関数を用いた。すなわち、入力x、出力yの範囲をいずれも0以上1以下としたとき([0,1]→[0,1])、入出力の最小値の組(0,0)と最大値の組(1,1)を結んだ直線(図5Aのy=xの直線)より常に上側になる曲線(図5Aのy=f(x))を表わす関数を用いた。この条件を数式で表わすと、シェーピング関数fは、
f(0)=0、f(1)=1
f(a)>a(0<a<1)
を満たす関数である。具体的には例えば、シェーピング関数としてy=sin(πx/2)を用いることができる。
上述した各係数の更新は、具体的には例えば以下のように行うことができる。まず、位相係数算出部262および第1の振幅係数算出部272は、制御部250の入力信号(x(t+τ))の振幅に対応して各ルックアップ・テーブルのアドレス値pを算出する。そして、更新値ΔθおよびΔrをそれぞれ対応する第1のルックアップ・テーブル263および第2のルックアップ・テーブル273のp番地の値に足しこむことにより各ルックアップ・テーブルの値を更新する。
位相係数の更新を繰り返すことによって、増幅装置200の入力信号と出力信号の位相誤差が最小となる位相係数である位相補正値を算出する(ステップS206)。また、第1の振幅係数の更新を繰り返すことによって、入力変調信号と出力信号の振幅誤差を最小にする第1の振幅係数である第1の振幅補正値を算出する(ステップS207)。このとき、シェーピング後の入力変調信号(rx’(t+τ))と出力信号(ry(t))は線形な関係になる。ただし、シェーピングを行う前の入力信号(rx(t+τ))に対しては出力信号(ry(t))は線形な関係にはなく、この時点では出力信号は歪んだ状態のままである。
切替制御部290は、第1の振幅係数算出部272が出力する第1の振幅係数の更新値(Δr)が収束したかどうかを判定する。収束したと判定した場合、第1の振幅係数算出部272の動作を停止(OFF)状態とし(ステップS208)、第2の振幅係数算出部282を動作(ON)状態とする(ステップS209)。つまり、図10における手順1から手順2への移行を行う。このとき第1の振幅補正値は一定となり、第1の振幅補正値に基づいて定まる第1のプリディストータ部130の入出力振幅特性は固定される(ステップS210)。収束の判定は例えば、更新値の絶対値(|Δr|)のN回平均値が、閾値βを下回ったときに収束したとみなすことにより行うことができる。ここで、Nおよびβはあらかじめ与えられるパラメータである。
以上説明した手順1により、増幅装置200の入力振幅に対する出力位相の特性(AM−PM特性)は、入力信号と出力信号の位相誤差が最小となるように最適化される。また、入力振幅に対する出力振幅の特性(AM−AM特性)は、シェーピング関数と同様の特性曲線を示すことになる。つまり、手順1の終了時点においては、AM−AM特性は歪んだ状態のままである。また、手順1では電源電圧に関しては最適化処理が施されていないため、増幅装置の効率動作の点では最適動作状態とはなっていない。
上述した第1の振幅補正値の算出において、あらかじめ定められた時間(τ1)を経過した後においてもLMSアルゴリズムが収束しなかった場合は、シェーピング関数をより線形に近い関数に変更し、初期化から再度処理を行うこととしてもよい。具体的には、従前のシェーピング関数y=f(x)に対して、例えば関数y=(x+f(x))/2を新たなシェーピング関数として用いることができる。
なお、第2の振幅係数算出部282が動作(ON)状態となった後に、第2の振幅制御部(AM−AM2)280は第2のプリディストータ部140を制御することによって、電力増幅器110の出力が飽和する直前の状態とすることが望ましい。ここで電力増幅器110の入出力特性が飽和するのは、電力増幅器110の出力振幅と電力増幅器110の電源電圧がほぼ同等になる場合である。以下に、この場合の具体的な制御手法の一例を説明する。
図11は、電力増幅器110に供給する電源電圧の制御手法を説明するための図であり、横軸は時間、縦軸は電圧である。第2の振幅制御部(AM−AM2)280における第2の振幅係数の初期値によって、電源電圧変調部120は電力増幅器110に初期電源電圧Vdd0(t)を供給する。この初期電源電圧Vdd0(t)は、電力増幅器110の出力信号の振幅v(t)に対して、あらかじめ指定された十分大きな正のオフセットv0を有するように設定する。すなわち、Vdd0(t)=v(t)+v0である。
上述した手順1における第1の振幅係数の最適化が終了した後、電源電圧変調部120を制御することにより電源電圧の電圧オフセットv0の値を下げていく。このとき例えば、入力信号に対する出力信号の比である増幅率(ゲイン)をモニタし、電圧オフセットv0の下げ幅に対してゲインの減少値があらかじめ設定された閾値を越えたときに、電圧オフセット値の更新を停止する。このときのオフセット値をv1とすると、電源電圧はv(t)+v1となる。このようにして、電力増幅器110の出力が飽和する直前の状態に電源電圧を設定することができる。
次に、図9と図10を参照して、第2のプリディストータ部140の動作を制御する第3のルックアップ・テーブル283に記録された第2の振幅係数を更新する手順を説明する(図10の手順2)。なお、位相制御部(AM−PM)260は手順1における場合と同じ動作を行うので、説明を省略する。
図9は制御部250の構成の一部を示すブロック図であり、第2のプリディストータ部140を制御する場合に対応する。第2の振幅係数算出部282は、第2の振幅係数の更新値(Δh)により第3のルックアップ・テーブル(LUT)283に記録された第2の振幅係数を更新する(ステップS211)。このとき第2の振幅係数算出部282は、手順1の終了時点において歪んだ状態にあるAM−AM特性が線形に近づくように第2の振幅係数を更新する。すなわち、AM−AM特性が線形関係にない入力振幅に対して、対応する電源電圧を減衰させることによって電力増幅器110を出力飽和状態とし、それにより出力振幅が減少するように制御する。
具体的には例えば、入力振幅rx(t)に対応する第3のルックアップ・テーブル(LUT)283の値を、線形からの差分値(ry(t)−rx(t))に比例して減少させることによって、電力増幅器110を出力飽和状態とすることができる。すなわち、rx(t)に対応する更新値(Δh(t))を
Δh(t)=−α(ry(t)−rx(t))
によって定める。ただし、αはあらかじめ与えられた値である。第2の振幅係数の更新は例えば、入力信号(x(t+τ))の振幅に対応したアドレス値を算出し、第3のルックアップ・テーブル(LUT)283の対応するアドレス値の値に更新値Δhを足しこむことによって行うことができる。
このようにして第2の振幅係数の更新を繰り返すことにより、電力増幅器110の各出力振幅において飽和状態とすることができる。その結果、各入力振幅において対応する出力振幅が減衰するので、手順1の終了時点において凸形状の入出力特性を有していたAM−AM特性を線形特性へと近づけることが可能となる。そして入力信号の振幅の全範囲において、入力信号の振幅に対する出力信号の振幅の比である振幅増幅率が一定となるときの第2の振幅係数を第2の振幅補正値として算出する(ステップS212)。これにより、電力増幅器110の入出力特性が飽和する領域を利用した高効率の増幅動作に加えて、振幅成分と位相成分の両方が補正された低歪みの出力信号が得られる。
以上説明したように、本実施形態の増幅装置200においては、第2の振幅制御部280が第2のプリディストータ部140を制御することによって、電力増幅器110は高効率で動作する。そして第1の振幅制御部270は、この動作状態における電力増幅器110の歪み特性を補償する変調信号を第1のプリディストータ部130が出力するように制御する。さらに、位相制御部(AM−PM)260は入力信号と出力信号の位相誤差が最小となるように常に第1のプリディストータ部130を制御する。このような構成とすることにより、本実施形態によれば、電力増幅器110が飽和領域で高効率な動作をしている状態において、入出力信号の振幅誤差および位相誤差を共に補償することが可能となる。
また、本実施形態による第2のプリディストータ部140の最適化は第2の振幅係数を減少させることによって行うため、計算量が少なくアルゴリズムの収束が早い。よって、本実施形態によれば、増幅装置の最適化を迅速に行うことができるという効果が得られる。さらに、本実施形態によれば、電力増幅器は飽和領域で動作していることから、関連する増幅装置よりも高効率な動作が可能である。
なお、第3のルックアップ・テーブル(LUT)283の係数の更新方法は上述した方法に限らず、例えばルックアップ・テーブルの連続性を保つために近接するアドレスの係数に関しても同時に低減するなど、その他の線形化手法を用いることができる。
上述した第2の振幅係数の更新操作を、増幅装置200の歪みがあらかじめ設定した規格値を満たすまで繰り返すこととしてもよい。例えば、隣接チャネル漏洩電力比(Adjacent−Channel Power Ratio:ACPR)が−40dB以下となるまで繰り返すことができる。
上述した第2の振幅補正値の算出において、あらかじめ定められた時間(τ2)を経過した後においても歪みが所定の規格値を満たさない場合は、出力飽和による歪みの影響が大きいと考えられる。そこで、出力飽和を緩和するようにシェーピング関数をより線形に近い関数に変更し、初期化から再度処理を行うこととしてもよい。この場合も手順1における場合と同様に、従前のシェーピング関数y=f(x)に対して、例えば関数y=(x+f(x))/2を新たなシェーピング関数として用いることができる。
本実施形態では、プリディストータとしてルックアップ・テーブル(LUT)方式を用いた場合について説明した。しかし、これに限らず、歪みの補正量を多項式で近似する方式、または複素信号による計算処理を行う方式によるプリディストータを用いることとしてもよい。
以上の説明では、増幅装置200は、電力増幅器110、電源電圧変調部120、第1のプリディストータ部130、第2のプリディストータ部140、および制御部250を有する構成とした。ここで、第1のプリディストータ部130と、第2のプリディストータ部140と、制御部250とが電力増幅器の制御装置を構成することとしてもよい。この場合においても、電力増幅器の制御装置と電源電圧変調部120と電力増幅器110を備えた構成によって、本実施形態の増幅装置200と同一の効果を得ることができる。電力増幅器の制御装置は例えば、フィールド・プログラマブル・ゲート・アレイ(FPGA)などによって実装することができる。
本発明は上記実施形態に限定されることなく、特許請求の範囲に記載した発明の範囲内で、種々の変形が可能であり、それらも本発明の範囲内に含まれるものであることはいうまでもない。
この出願は、2010年12月20日に出願された日本出願特願2010−283133を基礎とする優先権を主張し、その開示の全てをここに取り込む。
100、200 増幅装置
110 電力増幅器
120 電源電圧変調部
130 第1のプリディストータ部
140 第2のプリディストータ部
150、250 制御部
160、260 位相制御部(AM−PM)
170、270 第1の振幅制御部(AM−AM1)
171、271 シェーピング関数演算部
172、272 第1の振幅係数算出部
180、280 第2の振幅制御部(AM−AM2)
190 切替判定部
191 切替部
203 遅延器
251 入力信号処理部
252 出力信号処理部
262 位相係数算出部
263 第1のルックアップ・テーブル
273 第2のルックアップ・テーブル
282 第2の振幅係数算出部
283 第3のルックアップ・テーブル
290 切替制御部
301 アップコンバータ
302 ダウンコンバータ
500 関連する増幅装置
510 電力増幅器
520 電源変調部
530 歪補償部
540 第一推定部
550 第二推定部
S10 入力信号
S11 変調信号
S12 出力信号
S13 入力変調信号
S14 振幅誤差情報
S15 切替指示信号
S20 振幅情報
P10 位相係数
P11 第1の振幅係数
P12 第2の振幅係数
110 電力増幅器
120 電源電圧変調部
130 第1のプリディストータ部
140 第2のプリディストータ部
150、250 制御部
160、260 位相制御部(AM−PM)
170、270 第1の振幅制御部(AM−AM1)
171、271 シェーピング関数演算部
172、272 第1の振幅係数算出部
180、280 第2の振幅制御部(AM−AM2)
190 切替判定部
191 切替部
203 遅延器
251 入力信号処理部
252 出力信号処理部
262 位相係数算出部
263 第1のルックアップ・テーブル
273 第2のルックアップ・テーブル
282 第2の振幅係数算出部
283 第3のルックアップ・テーブル
290 切替制御部
301 アップコンバータ
302 ダウンコンバータ
500 関連する増幅装置
510 電力増幅器
520 電源変調部
530 歪補償部
540 第一推定部
550 第二推定部
S10 入力信号
S11 変調信号
S12 出力信号
S13 入力変調信号
S14 振幅誤差情報
S15 切替指示信号
S20 振幅情報
P10 位相係数
P11 第1の振幅係数
P12 第2の振幅係数
Claims (12)
- 入力信号に対して位相補償量および振幅調整量を付加した変調信号を出力する第1のプリディストータ部と、
前記変調信号を入力し、前記変調信号を増幅した出力信号を出力する電力増幅器と、
前記電力増幅器の電源電圧を変調する電源電圧変調部と、
前記入力信号の振幅情報に基づいて、前記電源電圧変調部の制御を行う第2のプリディストータ部と、
前記第1のプリディストータ部と前記第2のプリディストータ部の動作を制御する制御部、とを有し、
前記制御部は、
前記位相補償量を位相係数によって制御する位相制御部と、
前記振幅調整量を第1の振幅係数によって制御する第1の振幅制御部と、
前記第2のプリディストータ部の動作を第2の振幅係数によって制御する第2の振幅制御部、とを備え、
前記第1の振幅制御部と前記第2の振幅制御部は連動して、前記入力信号の振幅に対する前記出力信号の振幅の比である振幅増幅率を一定に制御する
増幅装置。 - 請求項1に記載した増幅装置において、
前記位相制御部は、前記入力信号と前記出力信号の位相誤差が最小となるときの前記位相係数を位相補正値として算出し、
前記第1の振幅制御部は、前記振幅増幅率が、前記入力信号の振幅の全範囲において、前記入力信号の振幅が最大であるときの前記振幅増幅率である基準振幅増幅率と等しいか又はこれを上回るときの前記第1の振幅係数を第1の振幅補正値として算出し、
前記第2の振幅制御部は、前記第1の振幅補正値が一定である条件の下で、前記入力信号の振幅の全範囲において、前記振幅増幅率が一定となるときの前記第2の振幅係数を第2の振幅補正値として算出する
増幅装置。 - 請求項2に記載した増幅装置において、
前記第1の振幅制御部は、シェーピング関数演算部と第1の振幅係数算出部とを備え、
前記シェーピング関数演算部は、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとるシェーピング関数を前記入力信号に作用させた入力変調信号を前記第1の振幅係数算出部に出力し、
前記第1の振幅係数算出部は、前記入力変調信号と前記出力信号の振幅誤差を最小にする前記第1の振幅係数を前記第1の振幅補正値として算出する
増幅装置。 - 請求項3に記載した増幅装置において、
前記第1の振幅係数算出部から前記入力変調信号と前記出力信号の振幅誤差を示す振幅誤差情報を取得し、前記振幅誤差情報に基づいて切替判定を行う切替判定部と、
前記切替判定の結果に基づいて、前記第1の振幅制御部の動作状態と、前記第2の振幅制御部の動作状態を切り替える切替部、とを備えた
増幅装置。 - 請求項2から4のいずれか一項に記載した増幅装置において、
前記第2の振幅制御部は、前記電源電圧変調部が、前記電力増幅器の出力が飽和状態となる電源電圧を供給するときの前記第2の振幅係数を第2の振幅補正値として算出する増幅装置。 - 請求項1から5のいずれか一項に記載した増幅装置において、
前記位相制御部は、前記第1のプリディストータ部の前記位相補償量を定める前記位相係数が記録された第1のルックアップ・テーブルを備え、
前記第1の振幅制御部は、前記第1のプリディストータ部の振幅調整量を定める前記第1の振幅係数が記録された第2のルックアップ・テーブルを備え、
前記第2の振幅制御部は、前記第2のプリディストータ部の動作を定める前記第2の振幅係数が記録された第3のルックアップ・テーブルを備える
増幅装置。 - 電源電圧を変調する電源電圧変調部を備えた電力増幅器の制御装置であって、
入力信号に対して位相補償量および振幅調整量を付加した変調信号を前記電力増幅器に出力する第1のプリディストータ部と、
前記入力信号の振幅情報に基づいて、前記電源電圧変調部の制御を行う第2のプリディストータ部と、
前記第1のプリディストータ部と前記第2のプリディストータ部の動作を制御する制御部、とを有し、
前記制御部は、
前記位相補償量を位相係数によって制御する位相制御部と、
前記振幅調整量を第1の振幅係数によって制御する第1の振幅制御部と、
前記第2のプリディストータ部の動作を第2の振幅係数によって制御する第2の振幅制御部、とを備え、
前記第1の振幅制御部と前記第2の振幅制御部は連動して、前記入力信号の振幅に対する前記電力増幅器の出力信号の振幅の比である振幅増幅率を一定に制御する
電力増幅器の制御装置。 - 増幅装置の入力信号と出力信号の位相誤差が最小となるように、前記入力信号に対する位相補償量を決定する位相係数を更新し、
前記位相誤差を最小にする前記位相係数である位相補正値を算出し、
前記入力信号に、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとる関数を作用させることによって入力変調信号を作成し、
前記入力変調信号と前記出力信号の振幅誤差が最小となるように、前記入力信号に対する振幅調整量を決定する第1の振幅係数を更新し、
前記入力変調信号と前記出力信号の振幅誤差を最小にする前記第1の振幅係数である第1の振幅補正値を算出し、
前記第1の振幅補正値を一定とした状態で、
前記増幅装置を構成する電力増幅器が出力飽和状態となる電源電圧を供給するように、前記入力信号の振幅情報に基づいて、前記電力増幅器の電源電圧の振幅を決定する第2の振幅係数を更新し、
前記入力信号の振幅に対する前記出力信号の振幅の比である振幅増幅率が一定となるときの前記第2の振幅係数を第2の振幅補正値として算出し、
前記位相補正値を用いて、前記入力信号と前記出力信号との間における位相誤差を補償し、前記第1の振幅補正値と前記第2の振幅補正値とを用いて、前記振幅増幅率を一定に制御する
増幅装置の制御方法。 - 請求項8に記載した増幅装置の制御方法において、
前記入力変調信号と前記出力信号の振幅誤差が最小となったときに、前記第1の振幅係数の更新を停止し、前記第2の振幅係数の更新を開始する増幅装置の制御方法。 - 請求項8または9に記載した増幅装置の制御方法において、
前記位相補正値の算出に最小平均二乗アルゴリズムを用いる増幅装置の制御方法。 - 請求項8から9のいずれか一項に記載した増幅装置の制御方法において、
前記第1の振幅補正値の算出に最小平均二乗アルゴリズムを用いる増幅装置の制御方法。 - コンピュータに、
増幅装置の入力信号と出力信号の位相誤差が最小となるように、前記入力信号に対する位相補償量を決定する位相係数を更新する手順と、
前記位相誤差を最小にする前記位相係数である位相補正値を算出する手順と、
前記入力信号に、全ての入力値に対して入力値と等しいか又はこれを上回る出力値をとる関数を作用させることによって入力変調信号を作成する手順と、
前記入力変調信号と前記出力信号の振幅誤差が最小となるように、前記入力信号に対する振幅調整量を決定する第1の振幅係数を更新する手順と、
前記入力変調信号と前記出力信号の振幅誤差を最小にする前記第1の振幅係数である第1の振幅補正値を算出する手順と、
前記第1の振幅補正値を一定とした状態で、
前記増幅装置を構成する電力増幅器が出力飽和状態となる電源電圧を供給するように、前記入力信号の振幅情報に基づいて、前記電力増幅器の電源電圧の振幅を決定する第2の振幅係数を更新する手順と、
前記入力信号の振幅に対する前記出力信号の振幅の比である振幅増幅率が一定となるときの前記第2の振幅係数を第2の振幅補正値として算出する手順と、
前記位相補正値を用いて、前記入力信号と前記出力信号との間における位相誤差を補償し、前記第1の振幅補正値と前記第2の振幅補正値とを用いて、前記振幅増幅率を一定に制御する手順
を実行させるためのプログラム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010283133 | 2010-12-20 | ||
| JP2010283133 | 2010-12-20 | ||
| PCT/JP2011/079971 WO2012086830A1 (ja) | 2010-12-20 | 2011-12-16 | 増幅装置およびその制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JPWO2012086830A1 true JPWO2012086830A1 (ja) | 2014-06-05 |
Family
ID=46314095
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012549907A Pending JPWO2012086830A1 (ja) | 2010-12-20 | 2011-12-16 | 増幅装置およびその制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9106188B2 (ja) |
| JP (1) | JPWO2012086830A1 (ja) |
| WO (1) | WO2012086830A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2500708B (en) * | 2012-03-30 | 2016-04-13 | Nujira Ltd | Determination of envelope shaping and signal path predistortion of an ET amplification stage using device characterisation data |
| JPWO2013145748A1 (ja) * | 2012-03-30 | 2015-12-10 | 日本電気株式会社 | 増幅器および増幅方法 |
| CN105099972B (zh) * | 2012-12-11 | 2018-05-04 | 华为技术有限公司 | 发射机的发射通道间干扰消除方法及装置 |
| US9680434B2 (en) * | 2012-12-28 | 2017-06-13 | Mediatek, Inc. | Method and apparatus for calibrating an envelope tracking system |
| GB201309235D0 (en) * | 2013-05-22 | 2013-07-03 | Nujira Ltd | Transfer function regulation |
| US9306507B2 (en) * | 2013-07-12 | 2016-04-05 | Intel Deutschland Gmbh | Controller and method for controlling a signal processor |
| US9231627B2 (en) * | 2013-11-06 | 2016-01-05 | Stmicroelectronics International N.V. | Adaptive ISO-Gain pre-distortion for an RF power amplifier operating in envelope tracking |
| US9246443B2 (en) * | 2013-11-26 | 2016-01-26 | Skyworks Solutions, Inc | Multi-mode power amplifier |
| EP3145080B1 (en) * | 2014-06-17 | 2018-08-08 | Huawei Technologies Co., Ltd. | Radio frequency power amplification system, radio frequency power amplification method, transmitter, and base station |
| JP7614940B2 (ja) * | 2021-05-13 | 2025-01-16 | 三菱電機株式会社 | 劣化判定システム、無線装置、判定装置、学習装置、および、推論装置 |
| US11770145B2 (en) | 2021-08-27 | 2023-09-26 | Samsung Electronics Co., Ltd | System and method for efficient initialization of memory digital pre-distorter coefficients to reduce calibration time |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6600369B2 (en) * | 2001-12-07 | 2003-07-29 | Motorola, Inc. | Wideband linear amplifier with predistortion error correction |
| JP4767583B2 (ja) * | 2004-06-29 | 2011-09-07 | パナソニック株式会社 | 歪補償回路 |
| WO2008072700A1 (ja) | 2006-12-14 | 2008-06-19 | Panasonic Corporation | 送信装置 |
| JP2008177899A (ja) | 2007-01-19 | 2008-07-31 | Sumitomo Electric Ind Ltd | 増幅回路及び無線通信装置 |
| JP2010045508A (ja) | 2008-08-11 | 2010-02-25 | Sumitomo Electric Ind Ltd | 増幅回路及び無線通信装置 |
| JP5206526B2 (ja) | 2009-03-19 | 2013-06-12 | 富士通株式会社 | 増幅装置および送信装置 |
-
2011
- 2011-12-16 JP JP2012549907A patent/JPWO2012086830A1/ja active Pending
- 2011-12-16 WO PCT/JP2011/079971 patent/WO2012086830A1/ja not_active Ceased
- 2011-12-16 US US13/993,893 patent/US9106188B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20130257531A1 (en) | 2013-10-03 |
| US9106188B2 (en) | 2015-08-11 |
| WO2012086830A1 (ja) | 2012-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JPWO2012086830A1 (ja) | 増幅装置およびその制御方法 | |
| US8364101B2 (en) | Amplifying device and transmitter apparatus | |
| US11082013B2 (en) | Method of reducing memory effect of power amplifier | |
| US7561636B2 (en) | Digital predistortion apparatus and method in power amplifier | |
| KR100802353B1 (ko) | 고효율 송신기를 위한 디지털 전치보상 시스템 및 방법 | |
| JP4801074B2 (ja) | 信号プリディストーションに関する装置と方法 | |
| US8565697B2 (en) | Distortion compensation apparatus and method | |
| US8903015B2 (en) | Apparatus and method for digital predistortion of non-linear amplifiers | |
| JP4077449B2 (ja) | テーブル参照型プリディストータ | |
| JP5124655B2 (ja) | 歪補償増幅器 | |
| JP2015099972A (ja) | 送信機モジュール | |
| JP6209925B2 (ja) | 歪補償装置および歪補償方法 | |
| JP2005117613A (ja) | 電力増幅器の線形化のためのデジタルフィードバック線形化装置及び方法 | |
| JP2015026968A (ja) | 歪補償装置および歪補償方法 | |
| JP2006279780A (ja) | 歪み補償装置及び歪み補償方法 | |
| JP2018195955A (ja) | 無線通信装置及び歪み補償方法 | |
| WO2021039256A1 (ja) | 歪補償回路、無線装置 | |
| US8633769B2 (en) | Dual loop adaptation digital predistortion architecture for power amplifiers | |
| KR20120054369A (ko) | 메모리 다항식 모델을 이용하는 전치 왜곡 장치, 그것의 전치 왜곡 방법, 및 전치 왜곡 장치를 포함하는 시스템 | |
| US20070159245A1 (en) | Apparatus for calibrating non-linearity of radio frequency power amplifier | |
| JP2020141379A (ja) | 歪み補償装置及び歪み補償方法 | |
| JP5258621B2 (ja) | 送信機および信号処理方法 | |
| JP2020088528A (ja) | 歪補償回路、送信装置および歪補償方法 | |
| JP2024039901A (ja) | 歪補償装置 | |
| JP2024039898A (ja) | 歪補償装置 |