精密な位置検出のために特許文献1に記載の光学式エンコーダを用いることも考えられるが,光学式エンコーダ(インクレメンタル・エンコーダ)は原点復帰処理が必要である。原点の位置は一般に可動範囲の端に設定されるが,そうすると原点復帰処理のために,必ず可動範囲の端まで操作リングを移動させなければならない。
この発明は位置検出のためにエンコーダで代表される回転量を表わす一連のパルスを発生する回転検出器を用い,原点復帰のために操作リングをわざわざ可動範囲の端点まで移動させずに,可及的に短時間で基準位置に基づいて操作リングの位置を検出することができるようにすることを目的とする。
この発明による駆動装置(駆動ユニット)は,光学系を保持するレンズ鏡胴に着脱自在に取付けられるものであって,鏡胴の外周に回転自在に設けられた操作リングを回転駆動するリング駆動系(リング駆動装置)を備えている。この駆動装置はさらに,操作リングの位置を検出するリング位置検出系(検出装置)を備えている。このリング位置検出系は,駆動装置がレンズ鏡胴に取付けられたときに操作リングのギヤに噛み合うことが可能な位置に設けられた検出ギヤを含む回転伝達機構,回転伝達機構に含まれる回転軸の回転を検出して操作リングの回転を表わす一連のパルス信号を出力するエンコーダ,および回転伝達機構に含まれる回転軸の回転を検出して操作リングの可動範囲の中間位置で基準信号を発生するように位置調整可能な基準信号発生器を有している。
操作リングの位置は最も一般的には角度位置であるが,操作リングによって調整されるフォーカス・レンズ(群),ズーム・レンズ(群)等の各種レンズの鏡胴の軸方向における位置,またはフォーカス距離,ズーム倍率,絞り値等で表わすこともできる。これらの位置や値は相互に換算可能であるからである。制御系,表示系の都合によって選択すればよい。
操作リングの可動範囲の中間位置とは,可動範囲の両端またはその近傍を除いた範囲である。操作リングの可動範囲内で1つの基準信号が発生する態様では,可動範囲の中央部(中心およびその近傍)が好ましく,操作リングの可動範囲内で2つの基準信号が発生する態様では,可動範囲をほぼ3等分したときの中央の部分(この場合には,可動範囲をほぼ3等分する2つの位置で基準信号が発生する),または4等分したときの中央を除く2つの位置が好ましい。操作リングが可動範囲内のどの位置にあっても可及的速やかに基準信号発生位置(基準位置)を通るようにするというこの発明の目的を考慮すると,「操作リングの可動範囲の中間位置」を,可動範囲の両端部の約1/5程度の範囲を除く中間部分とするのが妥当である。もっとも,基準信号の数を増加すれば中間部分の範囲は広くなるが,処理が複雑になるので,基準信号は2つ程度がよい。
基準信号が発生する位置は調整(設定)可能としておくことが望ましい。すなわち,この発明の実施態様では,この発明による駆動装置は,基準信号発生器が操作リングの中間位置で基準信号を発生するように上記回転伝達機構に含まれる回転軸の角度位置を調整する調整手段を備える。
一実施態様では調整手段は,回転伝達機構に含まれる回転軸に連動して回転する回転体と,この回転体に設けられた位置指標とを有している。
そして,位置指標を駆動装置に設けられたマークの位置と一致するように回転体を回転させて,基準信号発生器が操作リングの可動範囲の中間位置で基準信号を発生するように角度位置を調整するとよい。
この発明によると,操作リングが基準信号発生位置を一旦通過すれば,この基準信号発生位置を基準位置として,エンコーダの出力パルスを計数することにより(移動方向に応じて計数値を加,減算してもよい),操作リングの位置を検出することができる。そして,基準信号発生位置は,操作リングの可動範囲の中間位置に調整されているから,操作リングがどこにあっても,それほど差がない時間で操作リングが基準位置を通過することができ,位置検出のために極端に長い時間がかかったり,極端に短い時間であったりするようなことはあまりなく,ほぼ均一化された時間で位置検出が可能となる。
位置検出のためには基準位置を決定する初期処理が行われる。
すなわち,この発明による駆動装置のリング位置検出系はさらに,リング駆動系を駆動して操作リングをその可動範囲にわたって回転させ,エンコーダから出力されるパルス信号および基準信号発生器から出力される基準信号の発生状況を調査して基準信号発生器から基準信号が出力される位置を基準位置と決定する処理を含む初期処理を実行する初期処理手段と,上記初期処理手段によって決定した基準位置を含む初期処理の結果を記憶するメモリとを有している。
操作リングの可動範囲はレンズ鏡胴の構造によってあらかじめ定まっているので,可動範囲の両端の位置は既知である。操作リングを可動範囲にわたって回転させれば,その中間で基準信号が発生する。可動範囲の両端から基準信号発生位置までの間で発生するエンコーダの出力パルス信号の数を計数し,可動範囲全体における出力パルス信号の数(エンコーダの分解能に関連する)との比により,可動範囲の両端から基準信号発生位置(基準位置)までの間隔(角度,距離等)を算出できるので,基準位置を確定することができる。
この発明による駆動装置のリング位置検出系はさらに,メモリに記憶されている基準位置を基準としてエンコーダから出力される一連のパルス信号に基づいて操作リングの位置を算出する位置算出手段を有している。操作リングが一旦基準位置を通過すれば,以降はこの位置算出手段によって操作リングの位置が算出される。
操作リングは具体的には,ズーム・リング,フォーカス・リング,アイリス・リングのいずれかである。
好ましくは,この発明による駆動装置は,位置算出手段が算出する操作リングの位置が可動範囲の両端付近に近づいたときに,上記リング駆動系による駆動を停止させる制御手段をさらに備える。これにより,操作リングが可動範囲の両端に当たることが未然に防止される。操作リングの位置の検出が可能となるので,このような制御が行えるのである。
上記の初期処理を制御方法として表現すると,この発明による制御方法は,上述したレンズ鏡胴に着脱自在な駆動装置において,リング駆動系を駆動して操作リングをその可動範囲にわたって回転させ,上記エンコーダから出力されるパルス信号および上記基準信号発生器から出力される基準信号の発生状況を調査して基準信号発生器から基準信号が出力される位置を基準位置と決定する処理を含む初期処理を実行し,決定した基準位置を含む初期処理の結果をメモリに記憶させる初期処理制御を行うものである。
操作リングの位置を検出するための制御方法は,メモリに記憶されている基準位置を基準としてエンコーダから出力される一連のパルス信号に基づいて操作リングの位置を算出するものである。
リング駆動系の一部とリング位置検出系の一部とにおいて,構成要素を共用することもできる。この構成においては,リング駆動系は,駆動装置がレンズ鏡胴に取付けられたときに操作リングのギヤに噛み合うことが可能な位置に設けられた駆動ギヤを含み,この駆動ギヤが検出ギヤと兼用されている。
この発明による駆動装置は,より一般的に規定すると,光学系を保持するレンズ鏡胴に着脱自在に取付けられる駆動装置である。そして,この駆動装置は鏡胴の外周に回転自在に設けられた操作リングを回転駆動するリング駆動系を備えている。さらにこの駆動装置はレンズ鏡胴に取付けられたときに,操作リングの回転に連動してその回転を伝達する回転伝達機構,回転伝達機構に含まれる回転軸の回転を検出して操作リングの回転を表わす一連のパルス信号を出力する回転信号発生器,および回転伝達機構に含まれる回転軸の回転を検出して操作リングの可動範囲の中間位置で基準信号を発生するように位置調整可能な基準信号発生器を備える。
この発明によると,操作リングが基準信号発生位置を一旦通過すれば,この基準信号発生位置を基準位置として,エンコーダの出力パルスを計数することにより(移動方向に応じて計数値を加,減算してもよい),操作リングの位置を検出することができる。そして,基準信号発生位置は,操作リングの可動範囲の中間位置に調整されているから,操作リングがどこにあっても,それほど差がない時間で操作リングが基準位置を通過することができ,位置検出のために極端に長い時間がかかったり,極端に短い時間であったりするようなことはあまりなく,ほぼ均一化された時間で位置検出が可能となる。
図1は,駆動ユニット(駆動装置)1が装着されたレンズ鏡胴20の斜視図である。レンズ鏡胴20の外周には,先端側から後端側に向かって順に,フォーカス・リング22,ズーム・リング23およびアイリス・リング24が回動自在に設けられている。これらのフォーカス・リング22,ズーム・リング23およびアイリス・リング24は,レンズ鏡胴20の光軸を中心に360度未満の角度(例えば,ズーム・リングの場合は120度)(可動範囲)回転可能である。フォーカス・リング22,ズーム・リング23およびアイリス・リング24の外周面のそれぞれには歯22A,23Aおよび24Aが形成されている。駆動ユニット1に設けられた後述する駆動ギヤ81,61,71(図3参照)がこれらの歯(ギヤ)22A,23A,24Aにそれぞれ噛み合い,これらのリング22,23,24が駆動ユニット1によって回転駆動されることになる。レンズ鏡胴20の先端には,レンズ・カバー21が着脱自在に取り付けられている。レンズ鏡胴20の後端部には,レンズ鏡胴20をカメラ本体(図示略)に装着するためのマウント部25が形成されている。
レンズ鏡胴20の内部には,フォーカス・レンズ(レンズ群),ズーム・レンズ(レンズ群),アイリスなどの撮像光学系(いずれも図示略)が保持されている。ユーザが手動で,またはレンズ鏡胴に着脱自在な駆動ユニット1を利用して,フォーカス・リング22が回転操作されることにより,フォーカス・レンズが光軸方向に動き,ズーム・リング23が回転操作されることにより,ズーム・レンズが光軸方向に動く。また,アイリス・リング24が回転操作されることにより,アイリスの開口が調節される。
駆動ユニット1の上面には,ユーザによって操作されるアイリス・モード切替スイッチ2A,オート・スイッチ2B,ズーム・シーソー・スイッチ2Cおよびリターン・スイッチ2Dが設けられている。アイリス・モード切替スイッチ2Aは,アイリス調節を自動で行うオート・モードと,手動で行うマニアル・モードとを切り替えるものである。オート・スイッチ2Bは,アイリス調節をマニアル・モードにしているときに,一時的にオート・モードとするためのスイッチである。ズーム・シーソー・スイッチ2Cは,駆動ユニット1によってズーム・レンズの位置を動かすために,ズーム・リング23を正,逆回転させる指令を与えるものである。リターン・スイッチ2Dは,ビュー・ファインダ(図示略)に表示する画像を切り替えるスイッチである。この他に,駆動ユニット1にはその後端部に,駆動ユニット1によってフォーカス・リング22を回転させるためのフォーカス・スイッチ(図示略)およびアイリス・リング24を回転させるためのアイリス・スイッチ(図示略)が設けられている。
さらに,駆動ユニット1には4箇所に取付脚部6,7,8,9(図2参照)が形成されている。これらの取付脚部6,7,8,9にはそれぞれ穴6A,7A,8A,9Aがあけられ,これらの穴に固定ねじ3,4(穴6A,7Aについて)(穴8A,9Aについてはねじは図示されていない)を通し,レンズ鏡胴20の胴体(リング22,23,24以外の部分)にあけられたねじ孔にねじ込むことにより,駆動ユニット1がレンズ鏡胴20の外周面に装着される。これらのねじ3,4等が外されることにより,レンズ鏡胴20から駆動ユニット1が取り外される。
図2は駆動ユニット1の内周面が見えるように表わした斜視図,図3は駆動ユニット1の内周面の拡大図,図4は図3の鎖線で示す範囲を拡大して示すものである。
駆動ユニット1の内周面1Aは,レンズ鏡胴20の外周面に沿うように凹状に湾曲している。駆動ユニット1の内周面1Aは,駆動ユニット1がレンズ鏡胴20に装着されたときに,ズーム・リング23の歯23Aに対応する箇所において,ズーム・レンズ23の駆動のための開口60と位置検出(角度位置検出)のための開口30とがあけられている。同様に,内周面1Aには,駆動ユニット1がレンズ鏡胴20に装着されたときに,フォーカス・リング22の歯22Aに対応する箇所に,フォーカス・リング22の駆動のための開口80と位置検出のための開口90があけられている。さらに内周面1Aには,アイリス・リング24の歯24Aに対応する箇所に,アイリス・リング24の駆動兼位置検出用の開口70があけられている。
以下,駆動ユニット1内に設けられたズーム・リング23の駆動系(駆動装置)と位置検出系(位置検出装置)について説明する。
ズーム・リング23の駆動系には駆動ギヤ(歯車)61が備えられている。この駆動ギヤ61は開口60に臨んで配置されており,駆動ユニット1がレンズ鏡胴20に装着されたときに,ズーム・リング23の歯23Aと噛み合う。駆動ギヤ61の軸62は,必要な減速機構(図示略)を介してズーム駆動モータ107(図9参照)によって回転駆動される。これにより,ズーム・リング23が回動されることになる。
ズーム・リング23の角度位置検出系についてはさらに図5ないし図8を参照して説明する。
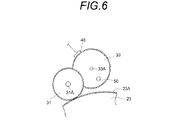
駆動ユニット1がレンズ鏡胴20に装着されたときに,ズーム・リングの歯23Aと噛み合う位置に設けられているのは検出ギヤ31であり,この検出ギヤ31は開口30に臨んでいる。駆動ユニット1内において,検出ギヤ31と同軸に,かつ一体に小ギヤ32が設けられ,回転軸31Aにより回転自在に支持されている。回転自在に支持された回転軸33Aに固定されたエンコーダ・ギヤ33が小ギヤ32と噛み合っている。駆動ユニット1内にはエンコーダ45が配置され,固定され,エンコーダ・ギヤ33の軸33Aにエンコーダ45の回転部分が連結している(回転伝達機構)。したがって,エンコーダ45(回転信号発生器)からは回転軸33Aの回転に伴って短い周期の一連のパルス信号が出力される。さらに,エンコーダ・ギヤ33の側面には,その半分程度の範囲において半円状の遮光板41がエンコーダ・ギヤ33の側面との間に間隔をあけて支持部材41Aにより固定されている。駆動ユニット1内に固定されたフォトインタラプタ40(基準信号発生器)の検出ヘッド40Aは,遮光板41を挟む位置に投光素子と受光素子とを備えている。したがって,遮光板41が検出ヘッド40Aの投,受光素子の光路内に入ると,フォトインタラプタ40からHレベルの検出信号が出力される。ギヤ31,32,33のギヤ比は,ズーム・リング23がその可動範囲(たとえば120度)内で回転するときにエンコーダ・ギヤ33がほぼ1回転するように定められている。遮光板41はエンコーダ・ギヤ33のほぼ半周にわたって設けられているから,フォトインタラプタ40はズーム・リング23の可動範囲のほぼ半分の角度範囲でHレベルの出力信号を発生する。
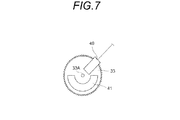
エンコーダ・ギヤ33(回転体)も開口30に臨む位置に(ズーム・リング23の歯23Aとは噛み合わない)配置されている。このギヤ33の遮光板41が取付けられている側とは反対側の側面には突起(位置指標)50が設けられている。他方,駆動ユニット1の内周面1Aの開口30の近傍の位置には位置決めマーク1Cが設けられている。マーク1Cの位置と突起50の位置とがほぼ一致しているときには(図4参照),ズーム・リングの可動範囲内の中間の位置で遮光板41がフォトインタラプタ40の光路を遮断する角度位置関係となるように,突起50と遮光板41の位置が決められている。(調整手段)
フォーカス・リング22の駆動系は,駆動ギヤ81と,減速機構を介してギヤ81の回転軸82を回転させるフォーカス駆動モータ(図示略)を備えている。駆動ギヤ81は開口80に臨み,駆動ユニット1がレンズ鏡胴20に装着されたときにフォーカス・リング22の歯22Aと噛み合う。フォーカス・リング22の位置検出系は,回転軸92に固定され,かつ開口90に臨む検出ギヤ91を含む。この検出ギヤ91はフォーカス・リング22の歯22Aと噛み合う。検出ギヤ91以外の検出系の構成は図4から図8を参照して説明したズーム・リングの検出系と同じ構成である。
アイリス用の開口70に臨んで駆動ユニット1内に配置されているのは,駆動兼位置検出用ギヤ71であり,このギヤ71は駆動ユニット1がレンズ鏡胴20に装着されたときにアイリス・リング24の歯24Aと噛み合う。ギヤ71はアイリス駆動用のモータにより減速機構を介して駆動される。また,ギヤ71と連動するように先に説明したズーム・リング検出系と同様の検出系が設けられている(いずれも図示略)。
なお,駆動ユニット20の内周面1Aには,レンズ鏡胴20に駆動ユニット1を装着するためのねじ3,4等を保持するねじ保持穴101から104が形成されている。
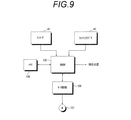
図9は,駆動ユニット1内のズーム・リングの駆動系および位置検出系の電気的構成を示すブロック図である。
駆動ユニット1は,制御装置105によって統括される。この制御装置105は,後述するように,初期処理,位置算出処理等を行う。制御装置105にはメモリ108が付随している。モータ駆動装置106は制御装置105からの指令に基づいてモータ107の回転方向,回転の開始,停止等を行うとともに,モータ104に流れる電流を検出してモータ107のフィードバック制御を行う。フォーカス・リングおよびアイリス・リングの駆動系および位置検出系の電気的構成も同様である。
図10は,ズーム・レンズの角度位置検出のための初期処理の処理手順を示すフローチャートである。図12は,エンコーダ45の出力信号およびフォトインタラプタ40の出力信号を示す波形図である。図12において縦軸は出力レベルを,横軸はズーム・リング23の回転角度を示している。
駆動ユニット1がレンズ鏡胴20に装着される前に,上述したように,駆動ユニット1の内周面1Aにつけられている位置決め用マーク1Cとエンコーダ・ギヤ33(回転体)に取り付けられている突起(位置指標)50とが向かい合うように,エンコーダ・ギヤ33がユーザによって回される(角度位置の調整)。また,ズーム・レンズがテレ端(操作リングの可動範囲の端部)となるようにズーム・リング23がユーザによって回される。
ユーザによって,駆動ユニット1の電源がオフとされてから(オフを確認した上で),駆動ユニット1がレンズ鏡胴20に装着される(ステップ111)。
駆動ユニット1の電源がオンにされ(ステップ112),ズーム・シーソー・スイッチ2Cが操作されると,スイッチ2Cの操作方向に応じてモータ107が正方向または逆方向に回転駆動される。ズーム・リング23がテレ端からワイド端に向かう方向を正方向,この反対方向を逆方向とする。駆動ユニット1をレンズ鏡胴20に装着するときに駆動ギヤ61および検出ギヤ31とズーム・リング23の歯23Aとをかみ合わせる。このときズーム・リング23がテレ端から若干動く可能性がある。レンズ制御装置105は,モータ107を一旦逆方向に回転させ,テレ端に至ったことを確認し,この後,ズーム・リング23をワイド端に向かう方向にモータ107を正転させ,ワイド端に至るとモータ107を停止する(ステップ113,114)。
駆動歯車61の回転軸62とモータ107の回転軸との間の減速機構にはスリップ機構(図示略)が備えられている。ズーム・リング(ズーム・レンズ)23のテレ端およびワイド端にはストッパが設けられており,ズーム・リング(ズーム・レンズ)23はテレ端とワイド端との間の可動範囲内でしか動くことができない。ズーム・リング23がテレ端またはワイド端に至るとスリップ機構が働いて,モータ107は空転する。モータ駆動装置106は,モータ107に流れる電流等を検知してモータ107が回転していることを検知する。スリップ機構が働いてズーム・リング23が回転しなければ,エンコーダ45の出力信号は変化しない。制御装置105は,エンコーダ45の出力信号の変化(変化なし)とモータ駆動装置106の検知するモータ回転継続とに基づいて,ズーム・リング23が端部(テレ端またはワイド端)に至ったことを認識する。これにより,制御装置105は,モータ107を停止させる,または停止ののち逆転させる。
ズーム・リング(ズーム・レンズ)23がテレ端からワイド端まで回転(移動)したときには(この逆方向の回転でもよい),図12に示すような信号がエンコーダ45およびフォトインタラプタ40から出力され制御装置105に入力している。モータ107を正転させた場合を考え,ズーム・リング23の回転に伴い,ある角度位置θ1でフォトインタラプタ40の出力は立上がり,その後,ある角度位置θ2で立下り,そしてワイド端に至るとする。制御装置105は,テレ端からフォトインタラプタ40の出力の立上がり検出までの間にエンコーダ45から出力されるパルスの数N1を計数する。また,フォトインタラプタの出力の立ち下がりからワイド端に至るまでの間にエンコーダ45から出力されるパルスの数N2を計数する。さらに制御装置105はズーム・リング223がテレ端からワイド端に至るまでの間にエンコーダ45から出力されるパルスの数Nを計数する。テレ端の角度位置θminおよびワイド端の角度位置θmaxは既知であり,その差(可動範囲)θ0=θmax−θminも既知である(メモリ108に記憶されている)。ズーム・リングの可動範囲θ0の間にN個のエンコーダ出力パルスが得られたのであるからエンコーダ45の分解能はP=θ0/Nである(パルス間隔tの間に進む角度)。フォトインタラプタ40の出力の立上がりの角度位置θ1は,θmin+P・N1として求められ,フォトインタラプタ40の立下りの角度位置θ2はθmax−P・N2として求められる。これらの角度位置θ1,θ2が基準位置となる。制御装置105(初期処理手段)は,上記値N,N1,N2をメモリ108に記憶させるとともに,算出した基準位置θ1,θ2もメモリ108に記憶させる。
図11は,上述した初期処理を終えた後に制御装置105が行うズーム・リング23の位置算出処理を示すものである。
駆動ユニット1の電源がオンとされ(ステップ115),ズーム・シーソー・スイッチ2Cが操作され,モータ107の正転または逆転が指令される(ステップ116)。
今,ズーム・リング23が図12のθで示す位置にあったとする(このθの位置はまだ不明である)。モータ107が逆転され,ズーム・リング23が図12の矢印Aで示す方向(左方向)に移動したとする。制御装置105はフォトインタラプタ40から入力する出力信号の立上がりを検出する(基準位置θ2において,正転のときは立下り,逆転のときは立上がりが検出される)(ステップ117)。これにより,制御装置105はズーム・リング(ズーム・レンズ)23が基準位置θ2を通過したことを認識する。この後は,制御装置105(位置算出手段)は,エンコーダ45のパルスを計数し,通過した基準位置θ2からの移動量(角度,距離)を算出する(ステップ119)。ある時点でn個のパルスを計数したとすると,そのときのズーム・リングの角度位置はθ2−P・nとなる。このように基準位置を1回通過した後は制御装置105は入力するエンコーダ出力パルスに基づいてズーム・リング23の位置を常時算出することができる。算出された現在位置を示すデータは,レンズ共同20が装着されているカメラ本体に与えられ,カメラ本体の表示画面にズーム倍率として表示されることとなる。
ズーム・リング2がθの位置から矢印Bで示す正転方向に動いたとする。この場合には,制御装置105はズーム・リング23がワイド端に至るまでモータ107を駆動してしまうことになる。ワイド端に至ると制御装置105は一旦モータ107を停止し,その後モータ107を逆転させる。そして,フォトインタラプタ40の出力の立上がりを検出すれば,これではじめて基準位置が分り,ズーム・リング23の現在位置の算出が可能となる。
上述したように,フォトインタラプタ40の出力信号がHレベルである角度範囲は可動範囲のほぼ半分である。パルス数N1,N2を計数した範囲は可動範囲の1/4程度である(1/3程度に設定してもよい)。いずれにしても,ズーム・リング23がθの位置から出発し,正転し,その後ワイド端に至って逆転し,基準位置θ2に達するまでに制御する範囲(角度,距離)は,テレ端近傍からワイド端近傍までの駆動する範囲よりもはるかに小さい。したがって,最悪の場合でも,テレ端がワイド端(可動範囲の両端)を基準位置とした場合よりも短い時間で基準位置θ1,θ2に達するので,比較的速やかに角度位置の検出が可能な状態となる。
テレ端やワイド端(可動範囲の両端)を基準位置としない利点はもう一つある。それは,制御装置105(制御手段)が位置検出を始めてから,検出した現在位置がテレ端またはワイド端の近傍に至ったときに(算出した現在位置がθminまたはθmaxに近い値となったときに)(ステップ120),モータ107を停止させることができることである(ステップ121)。
ズーム・リング23(ズーム・レンズ)が可動範囲に当たるまで動かされると,ズーム・リング23(ズーム・レンズ)に振動が加わり故障の原因となるおそれがある。このために,ズーム・リング23(ズーム・レンズ)を可動範囲端部に動かす回数はできるだけ少なくしたい。ズーム・リング23の可動範囲端部(テレ端θminまたはワイド端θmax)を基準にしてズーム・リング23(ズーム・レンズ)の現在位置を検出すると,ズーム・リング23(ズーム・レンズ)を可動範囲端に当たるまで動かさなければならない。この実施例では,フォトインタラプタ40から出力される信号の立上がりまたは立下りを基準にズーム・リング23(ズーム・レンズ)の現在位置を算出しているので,ズーム・リング23(ズーム・レンズ)を可動範囲端に当たるまで動かす回数が少なくなる。
また,この実施例では,ズーム・リング23の現在位置を算出するための基準となる基準位置が1箇所ではなく,2箇所となっている。いずれかの基準位置θ1,θ2を基準としてズーム・リング23(ズーム・レンズ)の現在位置を検出しているので,現在位置を検出するための基準位置を検出するまでの時間が短くなり,現在位置を算出できるまでの時間も短くなる。
上述の実施例は,ズーム・リング23についてのものであるが,フォーカス・リング22についても同様に駆動と角度位置検出が行われる。
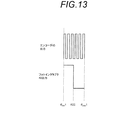
図13は,アイリス・リング24について上述したのと同じ原理で現在位置を算出する構成において,エンコーダ45から出力されるパルスとフォトインタラプタ32から出力される信号の波形図の一例である。
アイリス・リング24の可動範囲(たとえば,60度)は狭く,符号θmin1からθmax1で示す可動範囲でアイリス・リング24が回転する。この可動範囲内には,フォトインタラプタ40の出力信号の立上がりまたは立ち下がりのいずれか一方のみしか現れない。このような場合には,フォトインタラプタ40の出力信号の立下がり(または立上がり)がアイリス・リング24の可動範囲のほぼ中央となるようにすることにより,この基準位置θ22を検出するまでの時間がほぼ一定となる。