KR20140091006A - 모터 제어 회로 및 전기 모터의 속도를 외부 클럭 신호에 동기화시키는 방법 - Google Patents
모터 제어 회로 및 전기 모터의 속도를 외부 클럭 신호에 동기화시키는 방법 Download PDFInfo
- Publication number
- KR20140091006A KR20140091006A KR1020147013255A KR20147013255A KR20140091006A KR 20140091006 A KR20140091006 A KR 20140091006A KR 1020147013255 A KR1020147013255 A KR 1020147013255A KR 20147013255 A KR20147013255 A KR 20147013255A KR 20140091006 A KR20140091006 A KR 20140091006A
- Authority
- KR
- South Korea
- Prior art keywords
- signals
- signal
- generating
- difference value
- pwm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/10—Arrangements for controlling torque ripple, e.g. providing reduced torque ripple
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
Description
도 1은 복수의 변조 파형 생성기(modulation waveform generator)들 및 강제된 동기화 제어(forced synchronization control)를 구비한 예시적인 모터 제어 회로(여기서, 상기 모터 제어 회로는 전기 모터에 연결되고, 상기 모터는 모터 샤프트(motor shaft)의 회전각을 나타내는 신호들을 생성하기 위해 그 안에 배치된 홀 효과 자기장 검출 엘리먼트(Hall effect magnetic field sensing element)들을 구비)를 나타내는 블록도이다.
도 2는 도 1의 회로에 구비된 변조 파형 생성기들 중의 하나로서 사용될 수 있는 예시적인 변조 파형 생성기를 나타내는 블록도이다.
도 3은 도 2의 변조 파형 생성기와 관련된 신호 파형들을 나타내는 그래프이다.
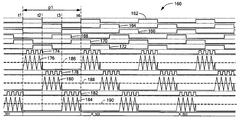
도 4는 도 1의 모터 제어 회로 내의 신호 파형들(여기서, 상기 신호 파형들은 도 1의 변조 파형 생성기들과 관련된 신호 파형들을 포함)을 나타내는 그래프이다.
도 5는 하나의 변조 파형 생성기를 구비한 종래의 모터 제어 회로 내의 신호 파형들을 나타내는 그래프이다.
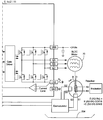
도 6은 복수의 변조 파형 생성기들 및 강제된 동기화 제어를 구비한 다른 예시적인 모터 제어 회로(여기서, 상기 모터 제어 회로는 전기 모터에 연결되고, 상기 모터는 모터 샤프트의 회전각을 나타내는 신호들을 생성하기 위해 그 안에 배치된 리졸버(resolver)를 구비)를 나타내는 블록도이다.
도 7은 복수의 변조 파형 생성기들 및 강제된 동기화 제어를 구비한 또 다른 예시적인 모터 제어 회로(여기서, 상기 모터 제어 회로는 전기 모터에 연결되고, 모터 샤프트의 회전각을 나타내는 신호들을 생성할 수 있는 상기 모터에 연결되는 역기전력(back EMF) 검출기를 구비)를 나타내는 블록도이다.
도 8은 도 1의 변조 파형 생성기들을 하나의 변조 파형 생성기로 대체할 수 있는 멀티플렉스 구성(multiplexed arrangement)을 나타내는 블록도이다.
Claims (22)
- 모터 샤프트 및 복수의 모터 와인딩들을 가진 멀티-위상 브러쉬리스 직류(DC) 모터의 구동 회로에 있어서,
상기 모터 샤프트의 회전 위치를 각각 나타내는 복수의 위치 신호들을 생성하는 위치 신호 생성기
상기 위치 신호들 중의 선택된 하나와 관련된 신호를 수신하고, 기준 클럭 신호를 수신하며, 상기 위치 신호들 중의 상기 선택된 하나와 관련된 상기 신호와 상기 기준 클럭 신호 사이의 주파수 차이와 관련된 주파수 차이 값을 생성하는 주파수 차이 프로세서
상기 주파수 차이 값을 수신하고, 동기화 선택 신호를 생성하는 동기화 제어 프로세서 및
상기 위치 신호들 중의 상기 선택된 하나와 관련된 상기 신호를 수신하는 제 1 입력 노드, 상기 기준 클럭 신호를 수신하는 제 2 입력 노드, 상기 동기화 제어 신호를 수신하는 제어 노드, 및 상기 위치 신호들 중의 상기 선택된 하나와 관련된 상기 신호 또는 상기 기준 클럭 신호로 구성된 멀티플렉서 출력 신호가 생성되는 출력 노드를 가진 멀티플렉서를 포함하는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로. - 제 1 항에 있어서, 상기 주파수 차이 값이 주파수 차이 값 쓰레시홀드보다 클 때, 상기 멀티플렉서 출력 신호는 상기 위치 신호들 중의 상기 선택된 하나와 관련되고, 상기 주파수 차이 값이 상기 주파수 차이 값 쓰레시홀드보다 작을 때, 상기 멀티플렉서 출력 신호는 상기 기준 클럭 신호와 관련되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로.
- 제 1 항에 있어서,
상기 위치 신호들 중의 상기 선택된 하나와 관련된 상기 신호를 수신하고, 상기 기준 클럭 신호를 수신하며, 상기 위치 신호들 중의 상기 선택된 하나와 관련된 상기 신호와 상기 기준 클럭 신호 사이의 위상 차이와 관련된 위상 차이 값을 생성하는 위상 차이 프로세서를 더 포함하고,
상기 동기화 제어 프로세서가 상기 위상 차이 값을 수신하는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로. - 제 3 항에 있어서, 상기 위상 차이 값이 위상 차이 값 쓰레시홀드보다 클 때, 상기 멀티플렉서 출력 신호는 상기 위치 신호들 중의 상기 선택된 하나와 관련되고, 상기 위상 차이 값이 상기 위상 차이 값 쓰레시홀드보다 작을 때, 상기 멀티플렉서 출력 신호는 상기 기준 클럭 신호와 관련되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로.
- 제 3 항에 있어서, 상기 주파수 차이 값이 주파수 차이 값 쓰레시홀드보다 크고 상기 위상 차이 값이 상기 위상 차이 값 쓰레시홀드보다 클 때, 상기 멀티플렉서 출력 신호는 상기 위치 신호들 중의 상기 선택된 하나와 관련되고, 상기 주파수 차이 값이 상기 주파수 차이 값 쓰레시홀드보다 작고 상기 위상 차이 값이 상기 위상 차이 값 쓰레시홀드보다 작을 때, 상기 멀티플렉서 출력 신호는 상기 기준 클럭 신호와 관련되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로.
- 제 5 항에 있어서,
상기 멀티플렉서 출력 신호를 수신하고, 상기 위치 신호들 중에서 선택된 것들을 수신하며, 서로 간에 기 설정된 도(degree)만큼 떨어져 있으면서 각각 제 1 상태 및 제 2 상태를 갖는 복수의 패턴 신호들을 생성하는 패턴 생성기
상기 패턴 신호들을 수신하고, 상응하는 복수의 펄스 폭 변조(pulse width modulated; PWM) 신호들을 생성하는 변조 회로 및
상기 PWM 신호들을 나타내는 복수의 신호들을 수신하고, 상기 PWM 신호들과 관련된 복수의 구동 신호들을 생성하는 복수의 구동 회로들을 더 포함하고,
상기 PWM 신호들 각각은 상기 패턴 신호들 각각의 제 1 상태 또는 제 2 상태 중의 선택된 하나에서만 펄스 폭 변조 파형을 포함하는 액티브 영역을 각각 가지며,
상기 구동 신호들 각각은 상기 모터 와인딩들 각각의 일 끝(one end)에 연결되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로. - 제 1 항에 있어서,
상기 멀티플렉서 출력 신호를 수신하고, 상기 위치 신호들 중에서 선택된 것들을 수신하며, 서로 간에 기 설정된 도(degree)만큼 떨어져 있으면서 각각 제 1 상태 및 제 2 상태를 갖는 복수의 패턴 신호들을 생성하는 패턴 생성기
상기 패턴 신호들을 수신하고, 상응하는 복수의 펄스 폭 변조(pulse width modulated; PWM) 신호들을 생성하는 변조 회로 및
상기 PWM 신호들을 나타내는 복수의 신호들을 수신하고, 상기 PWM 신호들과 관련된 복수의 구동 신호들을 생성하는 복수의 구동 회로들을 더 포함하고,
상기 PWM 신호들 각각은 상기 패턴 신호들 각각의 제 1 상태 또는 제 2 상태 중의 선택된 하나에서만 펄스 폭 변조 파형을 포함하는 액티브 영역을 각각 가지며,
상기 구동 신호들 각각은 상기 모터 와인딩들 각각의 일 끝(one end)에 연결되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로. - 제 7 항에 있어서, 상기 변조 회로는
상기 패턴 신호들 각각을 수신하고, 복수의 기능 신호들을 생성하는 복수의 변조 파형 생성기들 및
상기 기능 신호들 각각을 수신하고, 각각의 쓰레시홀드 값을 수신하며, 상기 기능 신호들 각각과 상기 각각의 쓰레시홀드 값을 비교하여 상기 각각의 쓰레시홀드 값에 따라 생성되는 듀티 싸이클을 가진 상기 PWM 신호들 각각을 생성하는 복수의 비교기들을 포함하고,
상기 기능 신호들 각각의 액티브 부분들은 상기 패턴 신호들 각각의 선택된 상태에서만 생성되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로. - 제 8 항에 있어서,
디더링된 값으로서 각각의 쓰레시홀드 값을 생성하는 디더링 프로세서를 더 포함하는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로. - 제 7 항에 있어서, 상기 변조 회로는
상기 패턴 신호들을 수신하고, 상기 패턴 신호들 각각의 상태 트랜지션(state transition)들에서 일어나는 상태 트랜지션들을 갖는 리셋 신호를 생성하는 결합 로직
상기 리셋 신호를 수신하고, 기능 신호를 생성하는 변조 파형 생성기
상기 기능 신호를 수신하고, 쓰레시홀드 값을 수신하며, 상기 기능 신호와 상기 쓰레시홀드 값을 비교하여 상기 쓰레시홀드 값에 따라 생성되는 듀티 싸이클을 가진 PWM 신호를 생성하는 비교기 및
상기 PWM 신호를 수신하고, 상기 PWM 신호를 분리된 각각의 신호 채널 상에서 각각 전달되는 복수의 서로 다른 부분들로 분리하는(split) 멀티플렉서를 포함하고,
상기 기능 신호들의 액티브 부분들은 상기 패턴 신호들의 선택된 상태에서만 생성되며, 상기 기능 신호는 상기 리셋 신호의 상기 트랜지션들에 따라 기 설정된 조건으로 리셋되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로. - 제 10 항에 있어서,
디더링된 값으로서 상기 쓰레시홀드 값을 생성하는 디더링 프로세서를 더 포함하는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 회로. - 모터 샤프트 및 복수의 모터 와인딩들을 가진 멀티-위상 브러쉬리스 직류(DC) 모터의 구동 방법에 있어서,
상기 모터 샤프트의 회전 위치를 각각 나타내는 복수의 위치 신호들을 생성하는 단계
상기 위치 신호들 중의 선택된 하나와 관련된 신호와 기준 클럭 신호 사이의 주파수 차이와 관련된 주파수 차이 값을 생성하는 단계
상기 주파수 차이 값에 따라 동기화 선택 신호를 생성하는 단계 및
상기 동기화 선택 신호에 따라, 상기 위치 신호들 중의 상기 선택된 하나와 관련된 상기 신호 또는 상기 기준 클럭 신호로 구성된 멀티플렉서 출력 신호를 생성하는 단계를 포함하는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법. - 제 12 항에 있어서, 상기 주파수 차이 값이 주파수 차이 값 쓰레시홀드보다 클 때, 상기 멀티플렉서 출력 신호는 상기 위치 신호들 중의 상기 선택된 하나와 관련되고, 상기 주파수 차이 값이 상기 주파수 차이 값 쓰레시홀드보다 작을 때, 상기 멀티플렉서 출력 신호는 상기 기준 클럭 신호와 관련되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법.
- 제 12 항에 있어서,
상기 위치 신호들 중의 상기 선택된 하나와 관련된 상기 신호와 상기 기준 클럭 신호 사이의 위상 차이와 관련된 위상 차이 값을 생성하는 단계를 더 포함하는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법. - 제 14 항에 있어서, 상기 위상 차이 값이 위상 차이 값 쓰레시홀드보다 클 때, 상기 멀티플렉서 출력 신호는 상기 위치 신호들 중의 상기 선택된 하나와 관련되고, 상기 위상 차이 값이 상기 위상 차이 값 쓰레시홀드보다 작을 때, 상기 멀티플렉서 출력 신호는 상기 기준 클럭 신호와 관련되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법.
- 제 14 항에 있어서, 상기 주파수 차이 값이 주파수 차이 값 쓰레시홀드보다 크고 상기 위상 차이 값이 상기 위상 차이 값 쓰레시홀드보다 클 때, 상기 멀티플렉서 출력 신호는 상기 위치 신호들 중의 상기 선택된 하나와 관련되고, 상기 주파수 차이 값이 상기 주파수 차이 값 쓰레시홀드보다 작고 상기 위상 차이 값이 상기 위상 차이 값 쓰레시홀드보다 작을 때, 상기 멀티플렉서 출력 신호는 상기 기준 클럭 신호와 관련되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법.
- 제 16 항에 있어서,
서로 간에 기 설정된 도(degree)만큼 떨어져 있으면서 각각 제 1 상태 및 제 2 상태를 갖는 복수의 패턴 신호들을 생성하는 단계
상응하는 복수의 펄스 폭 변조(pulse width modulated; PWM) 신호들을 생성하는 단계 및
상기 PWM 신호들과 관련된 복수의 구동 신호들을 생성하는 단계를 더 포함하고,
상기 PWM 신호들 각각은 상기 패턴 신호들 각각의 제 1 상태 또는 제 2 상태 중의 선택된 하나에서만 펄스 폭 변조 파형을 포함하는 액티브 영역을 각각 가지며,
상기 구동 신호들 각각은 상기 모터 와인딩들 각각의 일 끝(one end)에 연결되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법. - 제 12 항에 있어서,
서로 간에 기 설정된 도(degree)만큼 떨어져 있으면서 각각 제 1 상태 및 제 2 상태를 갖는 복수의 패턴 신호들을 생성하는 단계
상응하는 복수의 펄스 폭 변조(pulse width modulated; PWM) 신호들을 생성하는 단계 및
상기 PWM 신호들과 관련된 복수의 구동 신호들을 생성하는 단계를 더 포함하고,
상기 PWM 신호들 각각은 상기 패턴 신호들 각각의 제 1 상태 또는 제 2 상태 중의 선택된 하나에서만 펄스 폭 변조 파형을 포함하는 액티브 영역을 각각 가지며,
상기 구동 신호들 각각은 상기 모터 와인딩들 각각의 일 끝(one end)에 연결되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법. - 제 18 항에 있어서, 상기 PWM 신호들을 생성하는 단계는
복수의 기능 신호들을 생성하는 단계 및
상기 기능 신호들 각각과 각각의 쓰레시홀드 값을 비교하여 상기 각각의 쓰레시홀드 값에 따라 생성되는 듀티 싸이클을 가진 상기 PWM 신호들 각각을 생성하는 단계를 포함하고,
상기 기능 신호들 각각의 액티브 부분들은 상기 패턴 신호들 각각의 선택된 상태에서만 생성되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법. - 제 19 항에 있어서,
디더링된 값으로서 각각의 쓰레시홀드 값을 생성하는 단계를 더 포함하는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법. - 제 18 항에 있어서, 상기 PWM 신호들을 생성하는 단계는
상기 패턴 신호들 각각의 상태 트랜지션(state transition)들에서 일어나는 상태 트랜지션들을 갖는 리셋 신호를 생성하는 단계
기능 신호를 생성하는 단계
상기 기능 신호와 상기 쓰레시홀드 값을 비교하여 상기 쓰레시홀드 값에 따라 생성되는 듀티 싸이클을 가진 PWM 신호를 생성하는 단계 및
상기 PWM 신호를 분리된 각각의 신호 채널 상에서 각각 전달되는 복수의 서로 다른 부분들로 분리하는(split) 단계를 포함하고,
상기 기능 신호들의 액티브 부분들은 상기 패턴 신호들의 선택된 상태에서만 생성되며, 상기 기능 신호는 상기 리셋 신호의 상기 트랜지션들에 따라 기 설정된 조건으로 리셋되는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법. - 제 21 항에 있어서,
디더링된 값으로서 상기 쓰레시홀드 값을 생성하는 단계를 더 포함하는 것을 특징으로 하는 멀티-위상 브러쉬리스 직류 모터의 구동 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/278,458 US8638053B2 (en) | 2011-10-21 | 2011-10-21 | Motor control circuit and method that synchronize a speed of an electric motor to an external clock signal |
| US13/278,458 | 2011-10-21 | ||
| PCT/US2012/055422 WO2013058908A2 (en) | 2011-10-21 | 2012-09-14 | Motor control circuit and method that synchronize a speed of an electric motor to an external clock signal |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140091006A true KR20140091006A (ko) | 2014-07-18 |
| KR102001412B1 KR102001412B1 (ko) | 2019-07-18 |
Family
ID=47018479
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020147013255A Expired - Fee Related KR102001412B1 (ko) | 2011-10-21 | 2012-09-14 | 모터 제어 회로 및 전기 모터의 속도를 외부 클럭 신호에 동기화시키는 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8638053B2 (ko) |
| JP (1) | JP6038935B2 (ko) |
| KR (1) | KR102001412B1 (ko) |
| TW (1) | TWI451686B (ko) |
| WO (1) | WO2013058908A2 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190111838A (ko) * | 2018-03-23 | 2019-10-02 | 더 보잉 컴파니 | 조정 가능한 비교 기준을 이용한 펄스 폭 변조를 위한 시스템 및 방법 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130068050A (ko) * | 2011-12-15 | 2013-06-25 | 한국전자통신연구원 | 홀 센서 신호 발생 장치 |
| CN103853060B (zh) * | 2012-11-30 | 2017-06-23 | 上海拜骋电器有限公司 | 电子开关的控制器及控制方法、电子开关及电子设备 |
| US10158311B2 (en) | 2014-06-23 | 2018-12-18 | Shanghai Baicheng Electric Equipment Manufacture Co., Ltd. | Electronic switch control method |
| JP6490528B2 (ja) * | 2015-07-23 | 2019-03-27 | 東洋電装株式会社 | モータ、その回転周期検出方法、モータ回転周期検出センサアッセンブリ及び発電機 |
| TWI562530B (en) * | 2015-11-17 | 2016-12-11 | En Technologies Corp | System and way for motor-driven spreading |
| TWI593227B (zh) * | 2016-03-14 | 2017-07-21 | 茂達電子股份有限公司 | 馬達控制電路 |
| US10312847B2 (en) | 2016-05-09 | 2019-06-04 | Allegro Microsystems, Llc | Motor control using phase current and phase voltage |
| US9843285B1 (en) | 2016-07-22 | 2017-12-12 | Allegro Microsystems, Llc | Digital demodulator for pulse-width modulated (PWM) signals in a motor controller |
| TWI616057B (zh) * | 2016-11-01 | 2018-02-21 | 財團法人金屬工業研究發展中心 | 電助自行車、馬達的驅動控制裝置以及其驅動控制方法 |
| CA3096202A1 (en) | 2018-04-06 | 2019-10-10 | The Regents Of The University Of California | Methods of treating egfrviii expressing glioblastomas |
| CA3095757A1 (en) | 2018-04-06 | 2019-10-10 | The Regents Of The University Of California | Methods of treating glioblastomas |
| US11374513B2 (en) | 2019-01-23 | 2022-06-28 | Allegro Microsystems, Llc | Motor control circuit with degauss filter |
| TWI777686B (zh) * | 2021-07-23 | 2022-09-11 | 禾一電子科技有限公司 | 電子式旋轉編碼器 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5664309A (en) * | 1979-10-02 | 1981-06-01 | Northern Telecom Ltd | Optical fiber protective package |
| JP2000224890A (ja) * | 1999-01-28 | 2000-08-11 | Sharp Corp | インバータ洗濯機 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4223261A (en) | 1978-08-23 | 1980-09-16 | Exxon Research & Engineering Co. | Multi-phase synchronous machine system |
| US4494052A (en) * | 1982-08-05 | 1985-01-15 | Rca Corporation | DC Motor servo system |
| DE3579291D1 (de) | 1984-10-19 | 1990-09-27 | Kollmorgen Corp | Servomotorregelungssystem. |
| GB9518806D0 (en) | 1995-09-14 | 1995-11-15 | Switched Reluctance Drives Ltd | Reduced noise controller for a switched reluctance machine using active noise cancellation |
| GB9518837D0 (en) | 1995-09-14 | 1995-11-15 | Switched Reluctance Drives Ltd | Reduced noise controller for a switched reluctance machine |
| GB9607688D0 (en) | 1996-04-12 | 1996-06-12 | Switched Reluctance Drives Ltd | Current shaping in reluctance machines |
| JP4629938B2 (ja) * | 1999-09-17 | 2011-02-09 | ジーエム・グローバル・テクノロジー・オペレーションズ・インコーポレーテッド | スイッチング周波数ディザリングによるemiの低減 |
| JP3832396B2 (ja) | 2002-07-17 | 2006-10-11 | コニカミノルタフォトイメージング株式会社 | 駆動装置、位置制御装置およびカメラ |
| JP2005110471A (ja) | 2003-10-02 | 2005-04-21 | Matsushita Electric Ind Co Ltd | モータ駆動装置 |
| KR20070000444A (ko) * | 2004-01-27 | 2007-01-02 | 로무 가부시키가이샤 | 모터 구동 제어 회로 및 이를 이용한 모터 장치 |
| JP4469628B2 (ja) * | 2004-02-18 | 2010-05-26 | セイコーNpc株式会社 | 分散変調型クロック発生回路 |
| JP2006053271A (ja) * | 2004-08-10 | 2006-02-23 | Brother Ind Ltd | 画像形成装置 |
| JP2006058364A (ja) | 2004-08-17 | 2006-03-02 | Canon Inc | 画像形成装置 |
| JP2006287990A (ja) | 2005-03-31 | 2006-10-19 | Matsushita Electric Ind Co Ltd | ブラシレスモータ駆動方法 |
| US7541760B2 (en) * | 2007-03-13 | 2009-06-02 | Sentelic Corporation | Method capable of controlling brushless DC motor |
| US7747146B2 (en) | 2007-08-08 | 2010-06-29 | Allegro Microsystems, Inc. | Motor controller having a multifunction port |
| US7590334B2 (en) | 2007-08-08 | 2009-09-15 | Allegro Microsystems, Inc. | Motor controller |
| JP2009124864A (ja) | 2007-11-15 | 2009-06-04 | Panasonic Corp | モータ駆動装置 |
| JP4771240B2 (ja) * | 2009-03-31 | 2011-09-14 | ブラザー工業株式会社 | 画像形成装置 |
| JP2011109866A (ja) | 2009-11-20 | 2011-06-02 | Konica Minolta Business Technologies Inc | モータ制御装置 |
| KR101702440B1 (ko) * | 2010-07-08 | 2017-02-06 | 에스프린팅솔루션 주식회사 | 화상형성장치, 모터 제어 장치 및 그 모터 제어 방법 |
-
2011
- 2011-10-21 US US13/278,458 patent/US8638053B2/en active Active
-
2012
- 2012-09-14 KR KR1020147013255A patent/KR102001412B1/ko not_active Expired - Fee Related
- 2012-09-14 WO PCT/US2012/055422 patent/WO2013058908A2/en not_active Ceased
- 2012-09-14 JP JP2014537070A patent/JP6038935B2/ja active Active
- 2012-09-24 TW TW101134954A patent/TWI451686B/zh active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5664309A (en) * | 1979-10-02 | 1981-06-01 | Northern Telecom Ltd | Optical fiber protective package |
| JP2000224890A (ja) * | 1999-01-28 | 2000-08-11 | Sharp Corp | インバータ洗濯機 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190111838A (ko) * | 2018-03-23 | 2019-10-02 | 더 보잉 컴파니 | 조정 가능한 비교 기준을 이용한 펄스 폭 변조를 위한 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI451686B (zh) | 2014-09-01 |
| JP2014531187A (ja) | 2014-11-20 |
| WO2013058908A3 (en) | 2013-09-12 |
| US20130099706A1 (en) | 2013-04-25 |
| TW201330488A (zh) | 2013-07-16 |
| KR102001412B1 (ko) | 2019-07-18 |
| JP6038935B2 (ja) | 2016-12-07 |
| US8638053B2 (en) | 2014-01-28 |
| WO2013058908A2 (en) | 2013-04-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102001412B1 (ko) | 모터 제어 회로 및 전기 모터의 속도를 외부 클럭 신호에 동기화시키는 방법 | |
| US8742713B2 (en) | Motor control circuit and method that reduce speed jitter of an electric motor | |
| US10651767B2 (en) | Methods and apparatus for three-phase motor control with error compensation | |
| KR101517510B1 (ko) | 가변 임계값을 가지는 자기장 검출기 | |
| KR102119422B1 (ko) | 전기 모터를 구동하는 동안의 모터 지터의 감소를 위한 시스템들 및 방법들 | |
| US10480957B2 (en) | Magnetic field sensor to detect direction of angular rotation of a rotating magnetic structure, speed of the rotating magnetic structure or fault | |
| US9960716B2 (en) | Control timing and sequencing for a multi-phase electric motor | |
| US10436606B2 (en) | Magnetic field sensor to detect speed and direction of angular rotation of a rotating magnetic structure | |
| US10598514B2 (en) | Magnetic field sensor to detect speed of angular rotation of a rotating magnetic structure, direction of the rotating magnetic structure or fault | |
| US10571301B2 (en) | Frequency of an output signal of a magnetic field sensor to detect speed and direction of angular rotation of a rotating magnetic structure or a fault | |
| US10473486B2 (en) | Duty cycle of an output signal of a magnetic field sensor to detect speed and direction of angular rotation of a rotating magnetic structure or a fault | |
| KR20180067029A (ko) | 진상각 제어기 | |
| US20090027046A1 (en) | Magnetic detection device | |
| US6066929A (en) | Frequency generator circuit for a brushless DC motor control system | |
| US8476850B2 (en) | Drive circuit | |
| JPS61257015A (ja) | レベル設定回路 | |
| JPH02123991A (ja) | ブラシレスモータの駆動装置 | |
| JPH0316282A (ja) | ホール効果装置 | |
| EP3461299A1 (en) | Determining motor position |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| FPAY | Annual fee payment |
Payment date: 20220526 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20250713 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20250713 |