KR20140148496A - 주행차 시스템과 커브 구간에서의 주행차의 주행 제어 방법 - Google Patents
주행차 시스템과 커브 구간에서의 주행차의 주행 제어 방법 Download PDFInfo
- Publication number
- KR20140148496A KR20140148496A KR1020147032608A KR20147032608A KR20140148496A KR 20140148496 A KR20140148496 A KR 20140148496A KR 1020147032608 A KR1020147032608 A KR 1020147032608A KR 20147032608 A KR20147032608 A KR 20147032608A KR 20140148496 A KR20140148496 A KR 20140148496A
- Authority
- KR
- South Korea
- Prior art keywords
- permission
- vehicle
- driving
- running
- section
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0289—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling with means for avoiding collisions between vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/698—Control allocation
- G05D1/6987—Control allocation by centralised control off-board any of the vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/22—Platooning, i.e. convoy of communicating vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0297—Fleet control by controlling means in a control room
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/243—Means capturing signals occurring naturally from the environment, e.g. ambient optical, acoustic, gravitational or magnetic signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/617—Safety or protection, e.g. defining protection zones around obstacles or avoiding hazards
- G05D1/622—Obstacle avoidance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2101/00—Details of software or hardware architectures used for the control of position
- G05D2101/10—Details of software or hardware architectures used for the control of position using artificial intelligence [AI] techniques
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/10—Land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
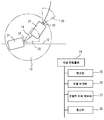
도 2는 2대의 주행차가 분기부를 커브 방향으로 분기하는 상태를 나타내는 도면이다.
도 3은 2대의 주행차가 분기부를 직진 방향으로 주행하는 상태를 나타내는 도면이다.
도 4는 실시예의 주행차 시스템에서의, 커브 구간의 블로킹 알고리즘을 나타내는 플로우 차트이다.
도 5는 커브 구간에서의 주행차의 상태(status)의 천이(遷移)를 나타내는 도면이다.
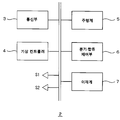
3; 통신부
4; 기상(機上) 컨트롤러
5; 주행계
6; 분기 합류 제어부
7; 이재계(移載系)
2f; 선행차
2r; 후행차
10; 분기부
12; 직진측
14; 커브측
20,22 ; 감시범위
24; 지상(地上) 컨트롤러
25; 메모리
26; 주행 허가부
27; 주행차 이력 메모리
28; 통신부
S1, S2; 장해물 센서
Claims (5)
- 주행차를 지상(地上) 컨트롤러의 제어 하에, 주행 루트 중의 커브(curve)를 수반하는 구간을 주행시키는 시스템으로서,
주행차는 주행 루트를 주행하는 동시에, 커브용 장해물 센서와, 지상 컨트롤러와의 통신부를 구비하고, 또한 커브를 수반하는 구간을 주행하기 전에 주행 허가를 상기 통신부를 통해 지상 컨트롤러에 요구하도록 구성되며,
지상 컨트롤러는 주행차의 주행을 제어하고,
주행차에 상기 구간으로의 주행 허가를 부여하는 것으로 기억하고, 주행차가 상기 구간을 빠져나오면 주행 허가를 소거(消去)하는 메모리와,
주행차로부터 상기 구간의 주행의 허가가 요구되면, 상기 메모리를 참조하여, 다른 주행차에 대해 주행 허가가 완료되지 않았으면 제 1 주행 허가를 부여하고, 다른 주행차에 대해 주행 허가가 완료되었으면, 제 1 주행 허가보다 저속(低速)의 주행을 허가하는 하위의 주행 허가를 부여하는 주행 허가부를 구비하고 있는 것을 특징으로 하는 주행차 시스템. - 제 1항에 있어서,
상기 주행 허가부는, 상기 구간을 가장 먼저 주행(最先行)하는 주행차가 상기 구간을 빠져나오면, 상기 구간에서의 상기 다른 주행차의 다음의 주행차에 대한 주행 허가를 제 1 주행 허가로 변경하도록 구성되어 있는 것을 특징으로 하는 주행차 시스템. - 제 1항 또는 제 2항에 있어서,
상기 지상 컨트롤러는, 상기 구간에서 선행차와 간섭한 혹은 급감속(急減速)한 빈도를 주행차마다 기억하는 수단을 더 구비하며,
상기 주행 허가부는, 하위의 주행 허가를 부여할 때에, 상기 빈도가 높을 때에 보다 저속으로의 주행 허가를 부여하고, 상기 빈도가 낮을 때에 보다 고속으로의 주행 허가를 부여하도록 구성되어 있는 것을 특징으로 하는 주행차 시스템. - 제 1항 내지 제 3항 중 어느 한 항에 있어서,
상기 구간은 분기부 혹은 합류부이며, 분기부에서 상기 다른 주행차와는 다른 쪽으로의 주행 허가가 요구되거나, 혹은 합류부에서 상기 다른 주행차와는 다른 쪽으로부터의 주행 허가가 요구되면, 상기 하위의 주행 허가를 부여하지 않도록, 상기 주행 허가부가 구성되어 있는 것을 특징으로 하는 주행차 시스템. - 주행차를 지상 컨트롤러의 제어 하에, 주행 루트 중의 커브를 수반하는 구간을 주행시키는 방법으로서,
주행차는, 커브를 수반하는 구간을 주행하기 전에 주행 허가를 지상 컨트롤러에 요구하며, 커브용 장해물 센서에 의해 커브 구간에서의 장해물을 감시하고, 또한 장해물을 검출하면 간섭을 회피하도록 감속 혹은 정지하며,
지상 컨트롤러는,
주행차에 상기 구간에 대한 주행 허가를 부여하는 것으로 메모리에 기억하고, 주행차가 상기 커브 구간을 빠져나오면 주행 허가를 메모리로부터 소거(消去)하며,
주행차로부터 상기 구간의 주행의 허가가 요구되면, 상기 메모리를 참조하여, 다른 주행차에 대해 주행 허가가 완료되지 않았으면 제 1 주행 허가를 부여하고, 다른 주행차에 대해 주행 허가가 완료되었으면, 제 1 주행 허가보다 저속(低速)의 주행을 허가하는 하위의 주행 허가를 부여하는 것을 특징으로 하는, 커브 구간에서의 주행차의 주행 제어 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2012-120563 | 2012-05-28 | ||
| JP2012120563 | 2012-05-28 | ||
| PCT/JP2013/061594 WO2013179802A1 (ja) | 2012-05-28 | 2013-04-19 | 走行車システムとカーブ区間での走行車の走行制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140148496A true KR20140148496A (ko) | 2014-12-31 |
| KR101675448B1 KR101675448B1 (ko) | 2016-11-11 |
Family
ID=49673009
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020147032608A Expired - Fee Related KR101675448B1 (ko) | 2012-05-28 | 2013-04-19 | 주행차 시스템과 커브 구간에서의 주행차의 주행 제어 방법 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US9336684B2 (ko) |
| EP (1) | EP2857918B1 (ko) |
| JP (1) | JP5874942B2 (ko) |
| KR (1) | KR101675448B1 (ko) |
| CN (1) | CN104350442B (ko) |
| SG (1) | SG11201407380SA (ko) |
| TW (1) | TWI557525B (ko) |
| WO (1) | WO2013179802A1 (ko) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112013000729T5 (de) * | 2013-09-11 | 2015-07-30 | Hitachi Construction Machinery Co., Ltd. | Fahrzeugverkehrs-Steuersystem |
| US11226637B2 (en) | 2016-08-22 | 2022-01-18 | Murata Machinery, Ltd. | Traveling vehicle system, and control method for traveling vehicle system |
| CA3035095C (en) | 2016-08-26 | 2025-09-23 | Crown Equipment Corporation | MULTI-FIELD SWEEPING TOOLS IN MATERIAL HANDLING VEHICLES |
| CN120295312A (zh) | 2016-08-26 | 2025-07-11 | 克朗设备公司 | 物料搬运车辆障碍物扫描工具 |
| JP6597520B2 (ja) | 2016-08-26 | 2019-10-30 | トヨタ自動車株式会社 | 情報処理装置 |
| CN114756031B (zh) | 2016-08-26 | 2025-05-27 | 克朗设备公司 | 物料搬运车辆和关于物料搬运车辆执行路径确认逻辑的方法 |
| JP6743750B2 (ja) * | 2017-04-14 | 2020-08-19 | 株式会社ダイフク | 物品搬送設備 |
| JP6863329B2 (ja) * | 2018-04-13 | 2021-04-21 | 村田機械株式会社 | 走行車システム及び走行車の制御方法 |
| CN111902784B (zh) * | 2018-05-31 | 2023-04-07 | 村田机械株式会社 | 搬送系统 |
| JPWO2020049876A1 (ja) * | 2018-09-05 | 2021-08-12 | 村田機械株式会社 | 走行車システム |
| CN109189082B (zh) * | 2018-11-20 | 2020-10-02 | 百度在线网络技术(北京)有限公司 | 用于控制移动机器人的方法、装置和控制系统 |
| CN109828574B (zh) * | 2019-02-22 | 2022-05-03 | 深兰机器人(上海)有限公司 | 一种避障方法及电子设备 |
| CN113841099B (zh) * | 2019-05-22 | 2024-04-26 | 村田机械株式会社 | 行驶车系统及行驶车的控制方法 |
| JP2022125369A (ja) * | 2019-07-04 | 2022-08-29 | 村田機械株式会社 | 走行システム |
| JP7365802B2 (ja) * | 2019-07-22 | 2023-10-20 | 株式会社ブリヂストン | 制御方法、制御装置、制御システムおよびタイヤ試験方法 |
| JP7234872B2 (ja) * | 2019-09-12 | 2023-03-08 | トヨタ自動車株式会社 | 車両遠隔指示システム |
| JP7327666B2 (ja) | 2020-05-27 | 2023-08-16 | 村田機械株式会社 | 走行車システム、及び走行車の制御方法 |
| JP7279691B2 (ja) * | 2020-08-07 | 2023-05-23 | 株式会社ダイフク | 物品搬送設備 |
| JP7652312B1 (ja) | 2024-03-06 | 2025-03-27 | 三菱電機ビルソリューションズ株式会社 | 交通管理装置、交通管理方法、交通管理プログラム、移動体システム、および移動体制御システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0781881A (ja) * | 1993-09-14 | 1995-03-28 | Kito Corp | 走行車の追・衝突防止装置 |
| WO2009142051A1 (ja) | 2008-05-22 | 2009-11-26 | 村田機械株式会社 | 走行車システムと走行車システムでの走行制御方法 |
| JP2011165025A (ja) | 2010-02-12 | 2011-08-25 | Murata Machinery Ltd | 走行台車システム |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6398006A (ja) * | 1986-10-14 | 1988-04-28 | Toshiba Corp | 無人車制御装置 |
| CA2053028C (en) * | 1990-10-23 | 1996-04-09 | Hideichi Tanizawa | Carriage running control system |
| JPH04160413A (ja) * | 1990-10-23 | 1992-06-03 | Daifuku Co Ltd | 移動車の走行制御設備 |
| JPH0863230A (ja) * | 1994-08-17 | 1996-03-08 | Murata Mach Ltd | 無人走行車 |
| JP3886252B2 (ja) * | 1998-04-27 | 2007-02-28 | 株式会社日立プラントテクノロジー | 無人搬送車の走行制御方法 |
| JP3065036B2 (ja) * | 1998-10-02 | 2000-07-12 | 株式会社東芝 | 車両交通制御装置 |
| JP4503333B2 (ja) * | 2004-03-30 | 2010-07-14 | 村田機械株式会社 | 搬送台車システム |
| JP2005321881A (ja) * | 2004-05-06 | 2005-11-17 | Toyota Industries Corp | 有軌道台車の走行を制御するシステム |
| JP2006048333A (ja) * | 2004-08-04 | 2006-02-16 | Asyst Shinko Inc | 搬送システム |
| JP2006137337A (ja) | 2004-11-12 | 2006-06-01 | Toshiba Corp | 列車制御システム、及び列車制御方法 |
| JP4438095B2 (ja) * | 2005-05-26 | 2010-03-24 | 村田機械株式会社 | 搬送システム |
| JP4099723B2 (ja) * | 2005-07-12 | 2008-06-11 | 村田機械株式会社 | 搬送台車システム |
| JP4306723B2 (ja) * | 2006-12-15 | 2009-08-05 | 村田機械株式会社 | 搬送台車システム |
| US7639159B2 (en) * | 2007-10-29 | 2009-12-29 | Kapsch Trafficcom Ag | System and method for determining intersection right-of-way for vehicles |
| KR101246280B1 (ko) * | 2008-09-26 | 2013-03-22 | 무라다기카이가부시끼가이샤 | 반송차 시스템 |
| JP4798554B2 (ja) * | 2009-03-05 | 2011-10-19 | 村田機械株式会社 | 走行車の走行制御システムと制御方法 |
| KR101425447B1 (ko) * | 2010-06-18 | 2014-07-31 | 무라다기카이가부시끼가이샤 | 주행차 시스템 |
-
2013
- 2013-04-19 JP JP2014518341A patent/JP5874942B2/ja active Active
- 2013-04-19 CN CN201380027642.4A patent/CN104350442B/zh active Active
- 2013-04-19 US US14/403,735 patent/US9336684B2/en active Active
- 2013-04-19 EP EP13797238.6A patent/EP2857918B1/en active Active
- 2013-04-19 WO PCT/JP2013/061594 patent/WO2013179802A1/ja not_active Ceased
- 2013-04-19 SG SG11201407380SA patent/SG11201407380SA/en unknown
- 2013-04-19 KR KR1020147032608A patent/KR101675448B1/ko not_active Expired - Fee Related
- 2013-05-27 TW TW102118611A patent/TWI557525B/zh active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0781881A (ja) * | 1993-09-14 | 1995-03-28 | Kito Corp | 走行車の追・衝突防止装置 |
| WO2009142051A1 (ja) | 2008-05-22 | 2009-11-26 | 村田機械株式会社 | 走行車システムと走行車システムでの走行制御方法 |
| JP2011165025A (ja) | 2010-02-12 | 2011-08-25 | Murata Machinery Ltd | 走行台車システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US9336684B2 (en) | 2016-05-10 |
| SG11201407380SA (en) | 2014-12-30 |
| WO2013179802A1 (ja) | 2013-12-05 |
| EP2857918B1 (en) | 2018-08-15 |
| EP2857918A4 (en) | 2016-06-22 |
| CN104350442A (zh) | 2015-02-11 |
| US20150187218A1 (en) | 2015-07-02 |
| JPWO2013179802A1 (ja) | 2016-01-18 |
| CN104350442B (zh) | 2017-03-08 |
| TW201403278A (zh) | 2014-01-16 |
| JP5874942B2 (ja) | 2016-03-02 |
| EP2857918A1 (en) | 2015-04-08 |
| KR101675448B1 (ko) | 2016-11-11 |
| TWI557525B (zh) | 2016-11-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101675448B1 (ko) | 주행차 시스템과 커브 구간에서의 주행차의 주행 제어 방법 | |
| JP5071695B2 (ja) | 走行車システムと走行車システムでの走行制御方法 | |
| CN106956679B (zh) | 自主车辆车道管理 | |
| KR101713081B1 (ko) | 대차 시스템 | |
| US20220204034A1 (en) | Method for carrying out an automated or autonomous driving operation of a vehicle | |
| CN103270461A (zh) | 搬送用行走体的行走控制方法 | |
| JP4503333B2 (ja) | 搬送台車システム | |
| CN103261989B (zh) | 搬送用行走体的行走控制方法 | |
| KR20210006551A (ko) | 차량 및 그 제어방법 | |
| JP5390419B2 (ja) | 自動搬送車 | |
| JP4151108B2 (ja) | 無人搬送車の衝突防止装置 | |
| KR20210076291A (ko) | 차량 및 그 제어방법 | |
| JP2010079407A (ja) | 無人搬送車の走行制御方法 | |
| JP2005301364A (ja) | 搬送台車システム | |
| JP4432974B2 (ja) | 走行車システム | |
| TWI875778B (zh) | 移行系統 | |
| JP4399739B2 (ja) | 搬送台車システム | |
| KR102836350B1 (ko) | 차량 및 그 제어방법 | |
| JP6488999B2 (ja) | 走行管理システム | |
| JPH03131911A (ja) | 無人搬送システムのカーブにおける衝突防止方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| FPAY | Annual fee payment |
Payment date: 20191025 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20201030 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20211029 Year of fee payment: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20221028 Year of fee payment: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20231108 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20231108 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |