KR20160092995A - 자기 베어링 장치, 및 진공 펌프 - Google Patents
자기 베어링 장치, 및 진공 펌프 Download PDFInfo
- Publication number
- KR20160092995A KR20160092995A KR1020167012128A KR20167012128A KR20160092995A KR 20160092995 A KR20160092995 A KR 20160092995A KR 1020167012128 A KR1020167012128 A KR 1020167012128A KR 20167012128 A KR20167012128 A KR 20167012128A KR 20160092995 A KR20160092995 A KR 20160092995A
- Authority
- KR
- South Korea
- Prior art keywords
- current
- magnetic bearing
- command value
- electromagnets
- gain
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/056—Bearings
- F04D29/058—Bearings magnetic; electromagnetic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0444—Details of devices to control the actuation of the electromagnets
- F16C32/0451—Details of controllers, i.e. the units determining the power to be supplied, e.g. comparing elements, feedback arrangements with P.I.D. control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D19/00—Axial-flow pumps
- F04D19/02—Multi-stage pumps
- F04D19/04—Multi-stage pumps specially adapted to the production of a high vacuum, e.g. molecular pumps
- F04D19/042—Turbomolecular vacuum pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/04—Shafts or bearings, or assemblies thereof
- F04D29/046—Bearings
- F04D29/048—Bearings magnetic; electromagnetic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/053—Shafts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0474—Active magnetic bearings for rotary movement
- F16C32/0489—Active magnetic bearings for rotary movement with active support of five degrees of freedom, e.g. two radial magnetic bearings combined with an axial bearing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/08—Structural association with bearings
- H02K7/09—Structural association with bearings with magnetic bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2231/00—Running-in; Initial operation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2233/00—Monitoring condition, e.g. temperature, load, vibration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2300/00—Application independent of particular apparatuses
- F16C2300/30—Application independent of particular apparatuses related to direction with respect to gravity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2360/00—Engines or pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C2360/00—Engines or pumps
- F16C2360/44—Centrifugal pumps
- F16C2360/45—Turbo-molecular pumps
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
- Non-Positive Displacement Air Blowers (AREA)
Abstract
한 쌍의 제곱기(32xp, 32xm), 및 가산기(33)가, 도시하지 않는 자기 베어링의 로터축을 래디얼 방향으로 반대 방향으로 서로 끌어당기는 한 쌍의 전자석의 각 전류 정상치(Ip, Im)를 취득하고, 각각 제곱화하여 가산한다. 그리고, 자기 베어링의 부착 자세에 따라 각 전자석의 전류를 최적으로 변화시키기 위해, 보정 계수 연산기(35)가, 제곱·가산된 전류 정상치(Ip^2+Im^2)로부터 전자석에 작용하는 보정 게인 지령치 Kcomp를 계산한다. 다음에, 전자석의 제어 회로의 기본 게인 Kctrl에 보정 게인 지령치 Kcomp를 가산한 게인 지령치 G를 게인 앰프(38)로 입력한다. 게인 앰프(38)는, 게인 지령치 G에 의거하여, 보정된 전류 지령치를 생성하여, 자기 베어링을 최적으로 제어한다.
Description
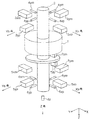
도 2은 본 발명의 하나의 실시예에 적용되는 자기 베어링을 구비한 진공 펌프의 구성을 나타내는 단면도이다.
도 3은 본 발명의 하나의 실시예에 적용되는 진공 펌프를 반도체 제조 장치에 부착했을 때의 부착 자세를 나타내는 개념도이다.
도 4는 본 발명의 하나의 실시예에 적용되는 자기 베어링과 제어 기기로 이루어지는 자기 베어링 장치의 구성을 나타내는 개념도이다.
도 5는 본 발명의 하나의 실시예에 적용되는 자기 베어링의 제어 기기의 제어 계통을 나타내는 블럭도이다.
3, 3xp, 3xm, 3yp, 3ym, 5, 5xp, 5xm, 5yp, 5ym: 래디얼 전자석
4, 4xp, 4xm, 4yp, 4ym, 6, 6xp, 6xm, 6yp, 6ym: 래디얼 센서
7, 7zp, 7zm: 엑시얼 전자석 8, 8z: 엑시얼 센서
11, 12: 보호용 드라이 베어링 13: 스테이터 날개
14: 로터 날개 15: 흡기구 플랜지
16: 배기구 플랜지 20: 자기 베어링 장치
21, 21a, 21b, 21c, 21d: 진공 펌프 22: 반도체 제조 장치
23: 자기 베어링 24: 제어 기기
31xp, 31xm: 전류 제어 앰프(전류 제어 수단)
32xp, 32zm: 제곱기(전류 취득 수단, 제곱화 수단)
33: 가산기(전류 취득 수단, 제2 가산 수단) 34: 로우패스 필터
35: 보정 계수 연산기(보정 계수 연산 수단) 36: 가산기(제1 가산 수단)
37: 보상기 38: 게인 앰프(전류 제어 수단)
39: 힘-전류 리니어 라이저(선형화 수단) 40: 반전기
41xp, 41xm: 가산기(전류 제어 수단)
Claims (10)
- 전자석의 전자력에 의해 로터축을 비접촉으로 지지하는 자기 베어링과, 상기 자기 베어링을 제어하는 제어 기기를 구비한 자기 베어링 장치로서,
상기 제어 기기는,
상기 자기 베어링의 상기 로터축을 반대 방향으로 서로 끌어당기는 한 쌍의 상기 전자석의 각각에 흐르는 전류 정상치를 취득하는 전류 취득 수단과,
상기 전류 정상치로부터, 상기 자기 베어링의 부착 자세에 기인하여 발생하는 한 쌍의 상기 전자석의 흡인력에 의한 불안정 스프링 상수를 보상하는 보정 게인 지령치를 구하는 보정 계수 연산 수단과,
상기 보정 게인 지령치와 상기 자기 베어링의 부착 자세에 관계없이 일의적으로 정해지는 기본 게인을 가산하여 게인 지령치를 구하는 제1 가산 수단과,
상기 게인 지령치에 의거하여 생성된 전류 지령치에 의해, 한 쌍의 상기 전자석의 각각에 흐르는 전류를 제어하는 전류 제어 수단을 구비하고 있는 것을 특징으로 하는 자기 베어링 장치. - 청구항 1에 있어서,
상기 전류 취득 수단은, 한 쌍의 상기 전자석의 각각에 흐르는 전류의 전류 검출치, 또는, 상기 전류 지령치에 의거하여, 상기 전류 정상치를 취득하는 것을 특징으로 하는 자기 베어링 장치. - 청구항 1 또는 청구항 2에 있어서,
상기 전류 제어 수단은, 상기 로터축의 위치 정보를 가지는 힘(力) 지령 중간 신호를 상기 게인 지령치에 의해 제어하고, 상기 게인 지령치에 의해 제어된 상기 힘 지령 중간 신호와 바이어스 전류 설정치를 가산하여 상기 전류 지령치를 생성하는 것을 특징으로 하는 자기 베어링 장치. - 청구항 1 내지 청구항 3 중 어느 한 항에 있어서,
상기 전류 지령치는, 한 쌍의 상기 전자석에 대해, 상기 불안정 스프링 상수를 없애고, 상기 로터축을 상기 자기 베어링의 중심으로 되돌리는 힘만을 작용시키는 것을 특징으로 하는 자기 베어링 장치. - 청구항 1 내지 청구항 4 중 어느 한 항에 있어서,
상기 전류 취득 수단은,
한 쌍의 상기 전자석의 각각에 흐르는 상기 전류 정상치를 개별적으로 제곱화하는 한 쌍의 제곱화 수단과,
한 쌍의 상기 제곱화 수단이 개별적으로 제곱화한 각각의 전류 정상치를 가산하는 제2 가산 수단을 구비하고 있는 것을 특징으로 하는 자기 베어링 장치. - 청구항 5에 있어서,
한 쌍의 상기 제곱화 수단과 상기 제2 가산 수단에 의해 제곱·가산된 전류 정상치를 평균화 처리하여 상기 보정 계수 연산 수단에 건네주는 로우패스 필터를 더 구비하고 있는 것을 특징으로 하는 자기 베어링 장치. - 청구항 6에 있어서,
상기 로우패스 필터는, 공진 주파수가 대략 1Hz인 것을 특징으로 하는 자기 베어링 장치. - 청구항 3 내지 청구항 7 중 어느 한 항에 있어서,
상기 전류 제어 수단이 생성한 전류 지령치와 상기 전자석의 흡인력의 관계를 나타내는 비선형 특성을 상기 바이어스 전류 설정치에 의해 선형화하는 선형화 수단을 더 구비하고 있는 것을 특징으로 하는 자기 베어링 장치. - 청구항 8에 있어서,
상기 선형화 수단은, 한 쌍의 상기 전자석의 양쪽에 전류가 흐르고 있지 않을 때만 기능하는 것을 특징으로 하는 자기 베어링 장치. - 청구항 1 내지 청구항 9 중 어느 한 항에 기재된 자기 베어링 장치를 구비하고 있는 것을 특징으로 하는 진공 펌프.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2013-246961 | 2013-11-29 | ||
| JP2013246961A JP6321949B2 (ja) | 2013-11-29 | 2013-11-29 | 磁気軸受装置、及び真空ポンプ |
| PCT/JP2014/076500 WO2015079802A1 (ja) | 2013-11-29 | 2014-10-03 | 磁気軸受装置、及び真空ポンプ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20160092995A true KR20160092995A (ko) | 2016-08-05 |
| KR102213999B1 KR102213999B1 (ko) | 2021-02-08 |
Family
ID=53198756
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167012128A Active KR102213999B1 (ko) | 2013-11-29 | 2014-10-03 | 자기 베어링 장치, 및 진공 펌프 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10359046B2 (ko) |
| EP (1) | EP3076036B1 (ko) |
| JP (1) | JP6321949B2 (ko) |
| KR (1) | KR102213999B1 (ko) |
| CN (1) | CN105723107B (ko) |
| WO (1) | WO2015079802A1 (ko) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3372854B1 (en) * | 2015-12-10 | 2020-06-24 | Daikin Industries, Ltd. | Magnetic bearing device and compressor |
| JP7148230B2 (ja) * | 2017-08-31 | 2022-10-05 | エドワーズ株式会社 | 真空ポンプ及び制御装置 |
| EP3489518B1 (de) * | 2017-11-28 | 2020-02-12 | Pfeiffer Vacuum Gmbh | Vakuumpumpe sowie anordnung und verfahren zur handhabung und/oder montage einer vakuumpumpe |
| CN109707733B (zh) * | 2018-11-27 | 2020-05-22 | 清华大学 | 一种磁轴承隔振与抗冲击控制方法及系统 |
| FR3129722B1 (fr) * | 2021-11-26 | 2023-11-24 | Skf Magnetic Mechatronics | Dispositif d’estimation de la sensibilié d’un capteur, procédé et système associé |
| JP2024168908A (ja) * | 2023-05-25 | 2024-12-05 | エドワーズ株式会社 | 真空ポンプ、磁気軸受装置及びロータ |
| US20250271002A1 (en) * | 2024-02-28 | 2025-08-28 | Kla Corporation | Three-axis tuned mass damper for turbo molecular pump |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05141423A (ja) * | 1991-11-18 | 1993-06-08 | Mitsubishi Heavy Ind Ltd | 可動物体装着用磁気軸受装置 |
| JPH0942290A (ja) | 1995-07-24 | 1997-02-10 | Shimadzu Corp | 磁気軸受装置 |
| JP4017383B2 (ja) * | 2001-12-04 | 2007-12-05 | Bocエドワーズ株式会社 | 磁気軸受制御装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6483916A (en) * | 1987-09-28 | 1989-03-29 | Hitachi Ltd | Control type magnetic bearing device |
| JPH02134410A (ja) * | 1988-11-12 | 1990-05-23 | Toshiba Corp | 磁気軸受の制御装置 |
| JP2533083Y2 (ja) * | 1990-11-30 | 1997-04-16 | セイコー精機株式会社 | 磁気軸受の制御装置 |
| US5256637A (en) * | 1991-07-22 | 1993-10-26 | Mechanical Technology Inc. | Superconducting coil bearings for rotor load |
| JP2835942B2 (ja) * | 1995-10-27 | 1998-12-14 | セイコー精機株式会社 | 磁気軸受の制御装置 |
| US6700258B2 (en) * | 2001-05-23 | 2004-03-02 | Calnetix | Magnetic thrust bearing with permanent bias flux |
| JP2004132441A (ja) * | 2002-10-09 | 2004-04-30 | Ntn Corp | 磁気軸受装置、それを用いたエキシマレーザ用貫流ファン装置、磁気軸受のフィードバック制御をコンピュータに実行させるためのプログラム、および磁気軸受のフィードバック制御をコンピュータに実行させるためのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2006083924A (ja) * | 2004-09-15 | 2006-03-30 | Boc Edwards Kk | 磁気軸受制御装置 |
| EP1942283B1 (en) * | 2005-07-05 | 2016-10-26 | Ebara Corporation | Magnetic bearing device and method of operating the device |
| CN1315254C (zh) * | 2005-07-08 | 2007-05-09 | 北京航空航天大学 | 一种集成化磁悬浮飞轮磁轴承数字控制装置 |
| JP5279890B2 (ja) * | 2011-12-29 | 2013-09-04 | 株式会社大阪真空機器製作所 | ラジアル方向制御器及び、それが適用された磁気軸受装置 |
-
2013
- 2013-11-29 JP JP2013246961A patent/JP6321949B2/ja active Active
-
2014
- 2014-10-03 EP EP14865812.3A patent/EP3076036B1/en active Active
- 2014-10-03 US US15/037,071 patent/US10359046B2/en active Active
- 2014-10-03 WO PCT/JP2014/076500 patent/WO2015079802A1/ja not_active Ceased
- 2014-10-03 CN CN201480064003.XA patent/CN105723107B/zh active Active
- 2014-10-03 KR KR1020167012128A patent/KR102213999B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05141423A (ja) * | 1991-11-18 | 1993-06-08 | Mitsubishi Heavy Ind Ltd | 可動物体装着用磁気軸受装置 |
| JPH0942290A (ja) | 1995-07-24 | 1997-02-10 | Shimadzu Corp | 磁気軸受装置 |
| JP4017383B2 (ja) * | 2001-12-04 | 2007-12-05 | Bocエドワーズ株式会社 | 磁気軸受制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3076036A4 (en) | 2017-07-12 |
| WO2015079802A1 (ja) | 2015-06-04 |
| EP3076036B1 (en) | 2020-08-12 |
| US20160290351A1 (en) | 2016-10-06 |
| CN105723107A (zh) | 2016-06-29 |
| EP3076036A1 (en) | 2016-10-05 |
| JP2015105680A (ja) | 2015-06-08 |
| JP6321949B2 (ja) | 2018-05-09 |
| KR102213999B1 (ko) | 2021-02-08 |
| US10359046B2 (en) | 2019-07-23 |
| CN105723107B (zh) | 2019-06-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102213999B1 (ko) | 자기 베어링 장치, 및 진공 펌프 | |
| JP4287213B2 (ja) | 振動抑制機能を有する磁気軸受装置、振動推定機能を有する磁気軸受装置及び該磁気軸受装置を搭載したポンプ装置 | |
| KR100622098B1 (ko) | 제어형 자기 베어링장치 | |
| JP6695541B2 (ja) | 磁気軸受制御装置および真空ポンプ | |
| US10968949B2 (en) | Magnetic bearing control device and vacuum pump | |
| CN108716471A (zh) | 一种磁悬浮分子泵转子极小位移主动控制方法 | |
| WO2019239682A1 (ja) | 磁気軸受制御装置および磁気軸受制御方法 | |
| KR100644852B1 (ko) | 자기베어링 보호장치 및 터보분자펌프 | |
| JP2012251486A (ja) | 磁気浮上式真空ポンプ、振れまわり推定方法、ロータバランス検査方法および磁気軸受制御ゲイン調整方法 | |
| JP4476694B2 (ja) | 磁気軸受装置および磁気軸受装置を備えた流体機械 | |
| JP7447546B2 (ja) | 磁気軸受装置および真空ポンプ | |
| JP6269080B2 (ja) | 磁気軸受装置および真空ポンプ | |
| JP6801481B2 (ja) | 磁気軸受装置および真空ポンプ | |
| KR20240052743A (ko) | 자기 베어링 장치 및 진공 펌프 | |
| Sahinkaya et al. | Bias current optimization and fuzzy controllers for magnetic bearings in turbo molecular pumps | |
| JP2957222B2 (ja) | 能動軸受のロータ支持制御装置 | |
| JP3785524B2 (ja) | 制御型磁気軸受装置 | |
| JP2002081444A (ja) | 磁気軸受装置および磁気軸受装置のセンサ感度調整方法 | |
| CN120074284B (zh) | 高速磁悬浮电机转子防振方法、系统、电子设备及介质 | |
| JP5115105B2 (ja) | 磁気軸受システム | |
| JP2020012405A (ja) | スクリュー圧縮機および磁気軸受制御方法 | |
| KR100280752B1 (ko) | 직선 운동 테이블용 자기 베어링 제어기 | |
| 张钢 | Dynamic characteristics of a working platform supported by an AMG | |
| CN121336056A (zh) | 无轴承马达 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |