KR20160106339A - 압력센서를 구비한 복강경 수술기구 및 이를 사용하는 환부 위치 감지 방법 - Google Patents
압력센서를 구비한 복강경 수술기구 및 이를 사용하는 환부 위치 감지 방법 Download PDFInfo
- Publication number
- KR20160106339A KR20160106339A KR1020150029118A KR20150029118A KR20160106339A KR 20160106339 A KR20160106339 A KR 20160106339A KR 1020150029118 A KR1020150029118 A KR 1020150029118A KR 20150029118 A KR20150029118 A KR 20150029118A KR 20160106339 A KR20160106339 A KR 20160106339A
- Authority
- KR
- South Korea
- Prior art keywords
- pressure sensor
- pressure
- laparoscopic
- surgical instrument
- laparoscopic surgical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0048—Detecting, measuring or recording by applying mechanical forces or stimuli
- A61B5/0053—Detecting, measuring or recording by applying mechanical forces or stimuli by applying pressure, e.g. compression, indentation, palpation, grasping, gauging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Medical Informatics (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Endoscopes (AREA)
Abstract
Description
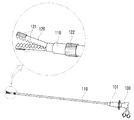
도 2는 본 발명의 다른 일실시예에 따른 압력센서를 구비한 복강경 수술기구를 개략적으로 나타낸 도면이다.
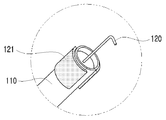
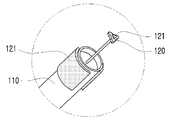
도 3a 내지 도 3d는 각각 본 발명에 따른 압력센서를 구비한 복강경 수술기구의 작업수단(120)의 다양한 실시예들을 나타낸 도면이다.
도 4는 본 발명의 일실시예에 따른 압력센서를 구비한 복강경 수술기구가 적용되는 수술 부위를 나타낸 도면이다.
101: 조정부
110: 연장부
120: 작업수단
121: 압력센서
200: 데이터 저장부
300: 분석수단
400: 표시수단
Claims (10)
- 파지부가 구비된 본체(100);
상기 본체(100)에서 연장된 연장부(110); 및
상기 연장부(110)의 일측에 형성된 복강경 작업수단(120)을 포함하는 복강경 수술기구로서,
상기 복강경 수술기구는 압력센서(121)를 포함하고,
상기 압력센서(121)로부터 획득되는 측정값을 이용하여 압력의 값이 표시수단(400)을 통해 출력되는,
복강경 수술기구.
- 제 1 항에 있어서,
상기 압력센서(121)는 상기 작업수단(120)의 말단에 위치하는,
복강경 수술기구.
- 제 1 항에 있어서,
상기 압력센서(121)는 상기 연장부(110)의 측면에 위치하는,
복강경 수술기구.
- 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 복강경 수술기구는 한 쌍이며,
상기 압력센서(121)는 상기 한 쌍의 복강경 수술기구에 각각 위치하는,
복강경 수술기구.
- 제 4 항에 있어서,
상기 표시수단(400)은 상기 한 쌍의 복강경 수술기구의 한 쌍의 압력센서(120)에서 획득되는 측정값을 이용하는 각각의 압력의 값과, 상기 각각의 압력의 값의 합을 모두 표시하는,
복강경 수술기구.
- 제 4 항에 있어서,
상기 복강경 수술기구는 알림부를 더 포함하며,
상기 한 쌍의 압력센서(120)에서 획득되는 측정값을 이용한 상기 각각의 압력의 값 또는 그 합이 미리 결정된 값 이상인 경우 알림부가 작동하는,
복강경 수술기구.
- 제 4 항에 있어서,
상기 복강경 수술기구는,
상기 측정값이 저장되는 데이터 저장부(200); 및
상기 데이터 저장부(200)에 저장된 상기 측정값을 분석하여 상기 압력의 값을 연산하는 분석수단(300)을 더 포함하며,
상기 표시수단(400)은, 상기 분석수단(300)에서 연산된 상기 압력의 값을 가시적으로 표시하는,
복강경 수술기구.
- 제 7 항에 있어서,
상기 표시수단(400)은 상기 압력센서(120)에서 측정되어 연산되는 압력의 값을 상기 압력센서(120)의 위치와 함께 출력함으로써, 압력분포를 표시하는,
복강경 수술기구.
- 제 8 항에 있어서,
상기 표시수단(400)은 상기 압력센서(120)의 위치에 따른 압력의 값을 다수 연산함으로써 상기 압력분포를 등고선 형태로 표시하는,
복강경 수술기구.
- 제 9 항에 있어서,
상기 복강경 수술기구는 카메라를 더 포함하며,
상기 표시수단(400)은 상기 카메라에서 촬영된 영상을 상기 압력분포와 함께 표시하는,
복강경 수술기구.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150029118A KR101721749B1 (ko) | 2015-03-02 | 2015-03-02 | 압력센서를 구비한 복강경 수술기구 및 이를 사용하는 환부 위치 감지 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150029118A KR101721749B1 (ko) | 2015-03-02 | 2015-03-02 | 압력센서를 구비한 복강경 수술기구 및 이를 사용하는 환부 위치 감지 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20160106339A true KR20160106339A (ko) | 2016-09-12 |
| KR101721749B1 KR101721749B1 (ko) | 2017-03-30 |
Family
ID=56950194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150029118A Expired - Fee Related KR101721749B1 (ko) | 2015-03-02 | 2015-03-02 | 압력센서를 구비한 복강경 수술기구 및 이를 사용하는 환부 위치 감지 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101721749B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117064496A (zh) * | 2023-09-11 | 2023-11-17 | 南京道壹生物医学科技有限公司 | 带监测传感器的腹腔镜钳及高精度压力监测方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101993206B1 (ko) * | 2018-12-05 | 2019-09-30 | 의료법인 명지의료재단 | 드릴비트의 휨을 인지하는 의료용 드릴 장치 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10216124A (ja) * | 1997-02-06 | 1998-08-18 | Olympus Optical Co Ltd | 触覚センサプローブ |
| JP2000287995A (ja) * | 1999-04-06 | 2000-10-17 | Olympus Optical Co Ltd | 手術用顕微鏡装置 |
| KR20110036453A (ko) * | 2009-10-01 | 2011-04-07 | 주식회사 이턴 | 수술용 영상 처리 장치 및 그 방법 |
| JP2014094273A (ja) * | 2012-10-09 | 2014-05-22 | Kagawa Univ | 内視鏡フード、内視鏡、内視鏡用圧力センサおよび組織サイズ測定方法 |
| US20140206953A1 (en) | 2012-09-14 | 2014-07-24 | Vanderbilt University | System and method for detecting tissue surface properties |
-
2015
- 2015-03-02 KR KR1020150029118A patent/KR101721749B1/ko not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10216124A (ja) * | 1997-02-06 | 1998-08-18 | Olympus Optical Co Ltd | 触覚センサプローブ |
| JP2000287995A (ja) * | 1999-04-06 | 2000-10-17 | Olympus Optical Co Ltd | 手術用顕微鏡装置 |
| KR20110036453A (ko) * | 2009-10-01 | 2011-04-07 | 주식회사 이턴 | 수술용 영상 처리 장치 및 그 방법 |
| US20140206953A1 (en) | 2012-09-14 | 2014-07-24 | Vanderbilt University | System and method for detecting tissue surface properties |
| JP2014094273A (ja) * | 2012-10-09 | 2014-05-22 | Kagawa Univ | 内視鏡フード、内視鏡、内視鏡用圧力センサおよび組織サイズ測定方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117064496A (zh) * | 2023-09-11 | 2023-11-17 | 南京道壹生物医学科技有限公司 | 带监测传感器的腹腔镜钳及高精度压力监测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101721749B1 (ko) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12138083B2 (en) | Flattened organ display | |
| JP4512160B2 (ja) | 経皮手術の測定器械 | |
| EP1545328B1 (en) | Measurement structure for surgical instruments | |
| US9123155B2 (en) | Apparatus and method for using augmented reality vision system in surgical procedures | |
| CN102525644B (zh) | 具有触觉反馈的电外科封闭工具 | |
| Miller et al. | Tactile imaging system for localizing lung nodules during video assisted thoracoscopic surgery | |
| US20150216541A1 (en) | Pointing device and drilling tool | |
| US20100249826A1 (en) | Finger mounting for surgical instruments particularly useful in open and endoscopic surgery | |
| KR101670162B1 (ko) | 센서부 및 측정부를 구비한 내시경 도구 및 이를 포함하는 시스템 | |
| EP2978375B1 (en) | Tunnel gage | |
| JP7281837B2 (ja) | 外科手術用測深器具 | |
| JP2019103792A (ja) | 組織特性を感知するための装置を含む外科用器具およびその方法 | |
| KR101721749B1 (ko) | 압력센서를 구비한 복강경 수술기구 및 이를 사용하는 환부 위치 감지 방법 | |
| JP2023508213A (ja) | 内部カメラを有するナビゲーショントロカール | |
| US20150182208A1 (en) | Tactile indicator for endoscopic instruments | |
| JP7217065B1 (ja) | 力覚表示装置、力覚表示方法およびプログラム | |
| JP7284868B2 (ja) | 外科手術システム | |
| JP2019088784A (ja) | 耳鼻咽喉科用剛性ツールの較正 | |
| JP2023508209A (ja) | モジュール式閉塞具ヘッドを有するトロカール | |
| EP4195996B1 (en) | Portable disposable microperitoneoscope for direct visualisation of peritoneal cavity of a patient at the point-of-care | |
| EP4595900A1 (en) | Puncture support apparatus, operation method thereof, and non-transitory computer readable medium | |
| US20160157842A1 (en) | Surgical instrument and method of use thereof | |
| US20240023889A1 (en) | System and Method Used to Detect or Differentiate Tissue or an Artifact | |
| WO2023220673A1 (en) | A visual interface for a system used to determine tissue characteristics | |
| KR20150102203A (ko) | 내시경에 적용될 수 있는 복강내 병변 위치 표지기구 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20220325 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20220325 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |