KR20170040971A - 레이더 모듈 및 레이더 모듈의 제어 방법 - Google Patents
레이더 모듈 및 레이더 모듈의 제어 방법 Download PDFInfo
- Publication number
- KR20170040971A KR20170040971A KR1020150140327A KR20150140327A KR20170040971A KR 20170040971 A KR20170040971 A KR 20170040971A KR 1020150140327 A KR1020150140327 A KR 1020150140327A KR 20150140327 A KR20150140327 A KR 20150140327A KR 20170040971 A KR20170040971 A KR 20170040971A
- Authority
- KR
- South Korea
- Prior art keywords
- radar
- vehicle
- lateral
- offset error
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4008—Means for monitoring or calibrating of parts of a radar system of transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9325—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles for inter-vehicle distance regulation, e.g. navigating in platoons
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
도 2는 레이더 신호로부터 추정한 전방 차량의 횡위치와 실제 횡위치를 전방차량과의 거리에 따라 나타낸 개략도이다.
도 3은 레이더 신호의 횡위치 오프셋 오차 발생 시 차량과 전방 차량의 위치를 나타낸 개략도이다.
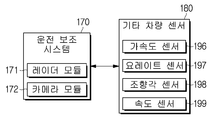
도 4는 본 발명의 실시예에 따른 레이더 모듈을 나타낸 블록도이다.
도 5는 본 발명의 실시에에 따른 레이더 모듈의 제어 방법을 나타낸 순서도이다.
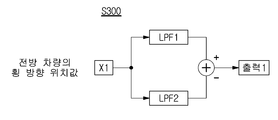
도 6은 출력 1 산출 방법을 나타낸 개략도이다.
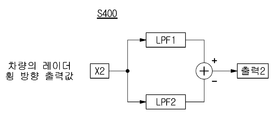
도 7은 출력 2 산출 방법을 나타낸 개략도이다.
Claims (8)
- 레이더 신호를 송수신하는 레이더 센서부;
차속 및 요레이트 값을 수신 받는 통신부; 및
상기 차속 및 요레이트값을 기초로 차량의 직진 주행으로 판단되고, 상기 레이더 신호를 기초로 미리 설정된 거리 이하에 전방 차량이 위치하는 경우, 상기 레이더 신호의 횡방향 오프셋 오차를 감소시키는 제어부;를 포함하는 레이더 모듈. - 제 1 항에 있어서,
상기 레이더 신호의 횡방향 오프셋 오차는 상기 전방 차량의 횡방향 위치값과 상기 레이더 센서부에서 송신한 레이더 횡방향 출력값을 기초로 산출하는 레이더 모듈. - 제 2 항에 있어서,
상기 제어부는 상기 전방 차량의 횡방향 위치값을 게인이 서로 다른 두 개의 저역 통과 필터를 통과시켜 획득한 차이값 및 상기 레이더 센서부에서 송신한 레이더 횡방향 출력값을 게인이 서로 다른 두개의 저역 통과 필터를 통과시켜 획득한 차이값이 미리 설정한 임계값보다 작으면 상기 오프셋 오차가 발생한 것으로 판단하는 레이더 모듈. - 제 3 항에 있어서,
상기 제어부는 상기 오프셋 오차가 발생한 것으로 판단하면, 상기 송신하는 레이더 신호에 횡방향 진동(Vibration)을 추가하는 레이더 모듈. - 레이더 신호를 송신 및 수신하는 단계;
차속 및 요레이트 값을 수신하는 단계;
상기 차속 및 요레이트 값을 기초로 차량의 직진 주행 여부를 판단하는 단계;
상기 레이더 신호를 기초로 미리 설정된 거리 이하에 전방 차량이 위치하는지 판단하는 단계; 및
상기 차량이 직진 주행이고, 상기 전방 차량이 미리 설정된 거리 이하에 위치하는 것으로 판단하면, 상기 레이더 신호의 횡방향 오프셋 오차를 감소시키는 단계;를 포함하는 레이더 모듈의 제어 방법. - 제 5항에 있어서,
상기 레이더 신호의 횡방향 오프셋 오차는 상기 전방 차량의 횡방향 위치값과 송신한 레이더 신호의 횡방향 출력값을 기초로 산출하는 레이더 모듈의 제어 방법. - 제 6항에 있어서,
상기 전방 차량의 횡방향 위치값을 게인이 서로 다른 두 개의 저역 통과 필터를 통과시켜 획득한 차이값 및 상기 레이더 센서부에서 송신한 레이더 횡방향 출력값을 게인이 서로 다른 두개의 저역 통과 필터를 통과시켜 획득한 차이값이 미리 설정한 임계값보다 작으면 상기 오프셋 오차가 발생한 것으로 판단하는 레이더 모듈의 제어 방법. - 제 7항에 있어서,
상기 오프셋 오차가 발생한 것으로 판단하면, 상기 송신하는 레이더 신호에 횡방향 진동(Vibration)을 추가하는 레이더 모듈의 제어 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150140327A KR20170040971A (ko) | 2015-10-06 | 2015-10-06 | 레이더 모듈 및 레이더 모듈의 제어 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150140327A KR20170040971A (ko) | 2015-10-06 | 2015-10-06 | 레이더 모듈 및 레이더 모듈의 제어 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170040971A true KR20170040971A (ko) | 2017-04-14 |
Family
ID=58579567
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150140327A Ceased KR20170040971A (ko) | 2015-10-06 | 2015-10-06 | 레이더 모듈 및 레이더 모듈의 제어 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170040971A (ko) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180138477A (ko) * | 2017-06-21 | 2018-12-31 | 현대오트론 주식회사 | 차량에서 물체를 인식하기 위한 장치 및 그것의 방법 |
| WO2019009670A1 (ko) | 2017-07-06 | 2019-01-10 | 주식회사 엘지화학 | 복합재 |
| WO2019009671A2 (ko) | 2017-07-06 | 2019-01-10 | 주식회사 엘지화학 | 복합재의 제조 방법 |
| WO2019054799A1 (ko) | 2017-09-15 | 2019-03-21 | 주식회사 엘지화학 | 복합재 |
| WO2019054815A1 (ko) | 2017-09-15 | 2019-03-21 | 주식회사 엘지화학 | 복합재의 제조 방법 |
| WO2019054818A1 (ko) | 2017-09-15 | 2019-03-21 | 주식회사 엘지화학 | 복합재 |
| WO2019059730A1 (ko) | 2017-09-22 | 2019-03-28 | 주식회사 엘지화학 | 복합재 |
| WO2020032535A1 (ko) | 2018-08-06 | 2020-02-13 | 주식회사 엘지화학 | 비대칭 복합재 |
| WO2020067743A1 (ko) | 2018-09-28 | 2020-04-02 | 주식회사 엘지화학 | 복합재 |
| WO2020067837A1 (ko) | 2018-09-28 | 2020-04-02 | 주식회사 엘지화학 | 복합재 |
| WO2020067838A1 (ko) | 2018-09-28 | 2020-04-02 | 주식회사 엘지화학 | 무선 충전 장치 |
| WO2020067839A1 (ko) | 2018-09-28 | 2020-04-02 | 주식회사 엘지화학 | 복합재 |
| KR20230020083A (ko) * | 2021-08-03 | 2023-02-10 | 공주대학교 산학협력단 | 도로 페인트 제거 장치 및 이를 이용한 도로 페인트 제거 방법 |
-
2015
- 2015-10-06 KR KR1020150140327A patent/KR20170040971A/ko not_active Ceased
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180138477A (ko) * | 2017-06-21 | 2018-12-31 | 현대오트론 주식회사 | 차량에서 물체를 인식하기 위한 장치 및 그것의 방법 |
| WO2019009670A1 (ko) | 2017-07-06 | 2019-01-10 | 주식회사 엘지화학 | 복합재 |
| WO2019009671A2 (ko) | 2017-07-06 | 2019-01-10 | 주식회사 엘지화학 | 복합재의 제조 방법 |
| WO2019054799A1 (ko) | 2017-09-15 | 2019-03-21 | 주식회사 엘지화학 | 복합재 |
| WO2019054815A1 (ko) | 2017-09-15 | 2019-03-21 | 주식회사 엘지화학 | 복합재의 제조 방법 |
| WO2019054818A1 (ko) | 2017-09-15 | 2019-03-21 | 주식회사 엘지화학 | 복합재 |
| WO2019059730A1 (ko) | 2017-09-22 | 2019-03-28 | 주식회사 엘지화학 | 복합재 |
| WO2020032535A1 (ko) | 2018-08-06 | 2020-02-13 | 주식회사 엘지화학 | 비대칭 복합재 |
| WO2020067743A1 (ko) | 2018-09-28 | 2020-04-02 | 주식회사 엘지화학 | 복합재 |
| WO2020067837A1 (ko) | 2018-09-28 | 2020-04-02 | 주식회사 엘지화학 | 복합재 |
| WO2020067838A1 (ko) | 2018-09-28 | 2020-04-02 | 주식회사 엘지화학 | 무선 충전 장치 |
| WO2020067839A1 (ko) | 2018-09-28 | 2020-04-02 | 주식회사 엘지화학 | 복합재 |
| KR20230020083A (ko) * | 2021-08-03 | 2023-02-10 | 공주대학교 산학협력단 | 도로 페인트 제거 장치 및 이를 이용한 도로 페인트 제거 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170040971A (ko) | 레이더 모듈 및 레이더 모듈의 제어 방법 | |
| KR102005253B1 (ko) | 극도로 빠르게 접근하는 차량들에 응답하는 차선 보조 시스템 | |
| EP3052961B1 (en) | Adaptive cruise control with on-ramp detection | |
| KR101987636B1 (ko) | 차량의 충돌회피 제어 방법 및 이를 구현하는 충돌회피 장치 | |
| US20150239472A1 (en) | Vehicle-installed obstacle detection apparatus having function for judging motion condition of detected object | |
| US20140297170A1 (en) | Driving support system | |
| US9352774B2 (en) | Vehicle driving assistance apparatus | |
| KR101946043B1 (ko) | 차량 탑재 장치의 호스트 차량의 운행 경로에 배치된 선행 차량을 선택하는 차량 탑재 장치 | |
| KR20160115448A (ko) | 차량의 운전 보조 시스템 및 운전 보조 방법 | |
| KR101592971B1 (ko) | 온-보드 장치 | |
| EP2405416B1 (en) | Adaptive cruise control method and system for controlling speed of vehicle | |
| JP2020021179A (ja) | 運転支援装置 | |
| US20170217395A1 (en) | Drive assist apparatus | |
| KR20210114689A (ko) | 차량 및 그 제어 방법 | |
| KR101286466B1 (ko) | 적응형 순항 제어장치 및 그 제어방법 | |
| KR20190105155A (ko) | 차량의 속도 설정 장치 및 방법 | |
| KR102221837B1 (ko) | 차선 변경 장치 | |
| JP2016200443A (ja) | 障害物検出装置 | |
| KR20150130056A (ko) | 운전자 편의 장치 및 그의 제어 방법 | |
| KR20200036069A (ko) | 차량 및 그 제어방법 | |
| EP3020609A1 (en) | A vehicle safety system | |
| KR101976822B1 (ko) | 레이더와 속도 센서를 이용한 차간거리 제어 시스템 및 그 방법 | |
| US12609033B2 (en) | Driving assistance device | |
| KR20210114683A (ko) | 차량 및 그 제어 방법 | |
| KR20160038473A (ko) | 차량의 지면 단차 판단 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R18 | Changes to party contact information recorded |
Free format text: ST27 STATUS EVENT CODE: A-3-3-R10-R18-OTH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |