KR20170052509A - 회전 속도 센서 신호의 2개의 신호 에지 사이의 기간을 예측하기 위한 방법 - Google Patents
회전 속도 센서 신호의 2개의 신호 에지 사이의 기간을 예측하기 위한 방법 Download PDFInfo
- Publication number
- KR20170052509A KR20170052509A KR1020160145850A KR20160145850A KR20170052509A KR 20170052509 A KR20170052509 A KR 20170052509A KR 1020160145850 A KR1020160145850 A KR 1020160145850A KR 20160145850 A KR20160145850 A KR 20160145850A KR 20170052509 A KR20170052509 A KR 20170052509A
- Authority
- KR
- South Korea
- Prior art keywords
- period
- rotational speed
- signal
- signal edges
- edges
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
- G01P3/4802—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage by using electronic circuits in general
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/009—Electrical control of supply of combustible mixture or its constituents using means for generating position or synchronisation signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/26—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using computer, e.g. microprocessor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0097—Electrical control of supply of combustible mixture or its constituents using means for generating speed signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1401—Introducing closed-loop corrections characterised by the control or regulation method
- F02D2041/1412—Introducing closed-loop corrections characterised by the control or regulation method using a predictive controller
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/10—Parameters related to the engine output, e.g. engine torque or engine speed
- F02D2200/101—Engine speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2250/00—Engine control related to specific problems or objectives
- F02D2250/14—Timing of measurement, e.g. synchronisation of measurements to the engine cycle
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
본 발명은, 회전 속도 센서의 일 신호의 2개의 연속하는 능동 신호 에지 중 적어도 하나가 아직 검출되지 않은 상태에서 이들 신호 에지 사이의 제1 기간(Δti)을 추정하기 위한 방법에 관한 것으로, 상기 회전 속도 센서는 연소 엔진의 인코더 휠을 스캐닝함으로써 상기 연소 엔진의 회전 속도를 결정하기 위한 신호를 제공하며, 상기 2개의 연속하는 능동 신호 에지 사이의 제2 기간(Δti - 1)이 결정되고, 상기 두 신호 에지 중 적어도 하나는 제1 기간(Δti)을 제한하지 않으며, 2개의 연속하는 능동 기준 신호 에지 사이에서 제1 기준 기간(Δti -m) 및 제2 기준 기간(Δti -m- 1)이 각각 결정되며, 이 경우 각각의 기준 신호 에지 및 상응하는 신호 에지가 각각 실린더 간격( )의 동일한 배수만큼 오프셋되어 있으며, 이 경우 제1 기준 기간(Δti -m)과 제2 기준 기간(Δti -m-1) 간의 차에 상응하는 인코더 휠의 동작 변동을 야기하는 데 필요한 토크 작용이 제1 기간(Δti) 및 제2 기간(Δti - 1)에 전용됨으로써, 제2 기간(Δti-1)을 고려해서 제1 기간(Δti)이 추정된다.
)의 동일한 배수만큼 오프셋되어 있으며, 이 경우 제1 기준 기간(Δti -m)과 제2 기준 기간(Δti -m-1) 간의 차에 상응하는 인코더 휠의 동작 변동을 야기하는 데 필요한 토크 작용이 제1 기간(Δti) 및 제2 기간(Δti - 1)에 전용됨으로써, 제2 기간(Δti-1)을 고려해서 제1 기간(Δti)이 추정된다.
Description
본 발명은, 회전 속도 센서 신호의 2개 신호 에지 사이의 기간을 예측하기 위한 방법, 그리고 이와 같은 방법을 수행하기 위한 계산 유닛 및 컴퓨터 프로그램에 관한 것이다.
자동차 내 연소 엔진은 일반적으로 소위 인코더 휠을 구비하며, 이 인코더 휠에 의해 연소 엔진의 회전 속도 또는 크랭크 샤프트 각도가 검출될 수 있다. 이를 위해, 회전 속도 센서에 의해 인코더 휠이 스캐닝 된다. 인코더 휠이 상호 일정한 각도 간격을 갖는 톱니들을 갖기 때문에, 회전 속도 센서는 교대로 상승 및 하강하는 신호 에지를 갖는 신호를 제공한다. 이와 같은 두 종류의 신호 에지, 소위 능동 신호 에지를 평가함으로써, 회전 속도 정보 또는 크랭크 샤프트 각도 정보가 제공될 수 있다.
본 발명에 따라, 독립 특허 청구항들의 특징들을 갖는, 회전 속도 센서 신호의 두 신호 에지 사이의 기간을 예측하기 위한 방법, 그리고 이와 같은 방법을 수행하기 위한 계산 유닛 및 컴퓨터 프로그램이 제안된다. 바람직한 실시예들은 종속 청구항들 및 이하의 상세한 설명의 대상이다.
청구항 1에 따른 특징들을 갖는 본 발명에 따른 방법은, 회전 속도 센서의 일 신호의 2개의 연속하는 능동 신호 에지 중 적어도 하나가 아직 검출되지 않은 상태에서 이들 신호 에지 사이의 제1 기간을 추정하는 데 이용된다.
도입부에서 이미 언급한 바와 같이, 회전 속도 센서 및 인코더 휠에 의해 연소 엔진을 위한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보가 제공될 수 있다. 하지만, 이와 같은 정보는 일반적으로 가장 마지막에 수집된, 다시 말해 가장 마지막에 측정되었거나 평가된 신호 에지까지만 제공될 수 있다. 예를 들어 바로 연속하는 2개의 능동 신호 에지 사이에 특정 개수의 등거리 각도 체크 표시(tick marks)가 부가 삽입됨으로써, 회전 속도 또는 크랭크 샤프트 각도에 대해 능동 신호 에지에 의한 것보다 더 상세한 정보가 제공될 수 있다. 하지만, 가장 마지막에 수집된 능동 신호 에지 이후의 정보를 위해서는, 예를 들어 가장 마지막에 수집된 능동 신호 에지와 아직 검출되지 않은 그 다음 능동 신호 에지 사이의 기간을 알고 있어야 한다.
도입부에서 이미 언급한 바와 같이, 회전 속도 센서는, 연소 엔진의 크랭크 샤프트에 고정 장착될 수 있고, 연소 엔진의 회전 시 상기 회전 속도 센서 근처를 지나는 인코더 휠의 톱니들과 연관되는 일련의 상승 및 하강 신호 에지를 제공한다. 일반적으로는, 하강 에지만 또는 상승 에지만 관찰되며, 이 경우 이들 에지를 능동 신호 에지라고 한다. 이와 같은 에지의 발생은 관련 인코더 휠 톱니들의 위치와 연관된다. 또한, 에지들 사이에서도 세분화된 각도 정보 또는 회전 속도 정보를 얻기 위하여, 2개의 능동 신호 에지 사이에 미리 결정된 개수의 각도 체크 표시를 계속해서 계수하는 각도 계수기가 구현될 수 있다. 2개의 능동 신호 에지 사이의 간격은 이하에서 "증분" 또는 "기간"이라고도 지칭된다. 이때, 각도 체크 표시의 발생 빈도수는, 후속 능동 신호 에지의 시점에 비로소 정확하게 공지될 증분 지속 시간 또는 기간에 의해 분할된 각도 체크 표시의 개수에 상응한다. 상기 빈도수는 후속 증분을 위한 각각의 새로운 신호 에지로써 새로 세팅되기 때문에, 후속하는 신호 에지가 도달할 때까지의 시간이 가급적 정확하게 예측될 수 있다면 바람직할 것이다. 이 경우에는, 가장 오래된 값이 새로운 값으로 다시 덮어쓰기(overwrite)될 때까지, 과거에 수집된 기간들의 히스토리를 소정의 시간 간격에 걸쳐 저장하는 크랭크 샤프트 신호 메모리에 액세스할 수 있다. 상기 기록된 범위 내에는, 연소 주기별로 반복되는 특정의 특징적인 토크 변이(moment variation), 예를 들어 실린더 내에서 공기 또는 공기 연료 혼합물의 압축 시 압축 패턴이 포함되어 있으며, 이와 같은 토크 변이는 기간 예측의 품질 개선을 위해서 고려될 수 있다.
상기와 같은 기간을 예측하는 의미에서의 추정을 위해, 이제 연소 엔진의 상이한 실린더들 또는 연소 주기들 사이의 일련의 톱니 시간(기간)이 높은 유사성을 갖는 상황이 유용하게 이용될 수 있음으로써, 이들 톱니 시간(기간)은 선형 리스케일링(linear rescaling)에 의해 상호 맵핑될 수 있다.
따라서, 다가올 기간(Δti)의 경우, 예를 들어 바로 이전의 기간(Δti -1), 및 하나의 실린더 간격 또는 하나의 연소 주기만큼 뒤에 있는 관련 기준 기간들(Δti -m 및 Δti -m- 1)을 토대로, 바로 후속하는 기준 기간들의 비를 이용하여, 추정값이 지시된다. 따라서, 하기의 식이 얻어진다.

상기 식에서 m은 실린더들 사이의 톱니 간격 또는 일 연소 주기 동안의 톱니 간격에 상응한다. 여기서 실린더 간격은, 연소 엔진의 개별 실린더들의 점화 시점들의 각도 간격을 의미하며, 이 경우 일 연소 주기는 실린더 간격과 실린더 개수의 곱을 형성한다. 예를 들어 4기통 엔진에서, 일 연소 주기가 720°인 경우, 실린더 간격은 180°이며, 이는 다시 크랭크 샤프트의 2회의 완전 회전에 상응한다.
하지만, 이 경우에는 과거의, 다시 말해 일 실린더 간격 또는 일 연소 주기만큼 뒤에 있는 기준 기간들에서의 기준 범위 이내의 회전 속도 변동이 항상 향후에 전용될 수는 없다는 문제가 제기된다. 우선적으로 크랭크 샤프트 각도에만 의존할 뿐 회전 속도에는 전혀 의존하지 않는 소위 압축 토크의 경우, 전술한 전용 가능성은 예측 범위와 기준 범위 간의 회전 속도차가 클수록 덜 보장된다.
더 나아가서는, 바로 이전의 기간 히스토리만 참조될 수도 있는데, 예를 들면 바로 이전의 2개 기간의 비만 참조될 수 있다. 따라서, 예를 들어 하기의 식이 얻어진다.

이 경우, 선행하는 기간 동안에 존재했던 회전 속도 경향(상승 또는 하강)이 향후에도 속행된다는 점이 전제되어야 한다. 그렇지 않은 경우(예컨대 방향 전환점 근방에서 또는 제1 연소 즈음에 크랭크 샤프트 상에서 진동이 발생하는 경우)에는, 그 다음 기간의 신뢰성 있는 추정이 불가능하다.
이제, 제안된 방법에서는, 기준 범위 내에서, 다시 말해 예측 범위 뒤에서는 실린더 간격의 수 배이고, 예측 범위 이내에서는 동일한 각도 의존적 토크[ ]에 의해 증분 지속 시간 또는 기간의 단기 변동이 야기된다는 점이 전제된다. 이것이 가능한 이유는, 제1 근사에서의 가정이 압축 토크의 회전 속도 의존성과 관련한 실제 상황들에 상당히 부합하기 때문이다. 일 실린더 안에 포함된 가스량의 압축을 위해서는 회전 속도와 무관하게 항상 동일한 힘이 필요하기 때문에, 상기와 같은 사실은 특히 이를 통해 야기되는 가속 토크 또는 제동 토크에도 적용된다. 이 경우, 하기의 식,
]에 의해 증분 지속 시간 또는 기간의 단기 변동이 야기된다는 점이 전제된다. 이것이 가능한 이유는, 제1 근사에서의 가정이 압축 토크의 회전 속도 의존성과 관련한 실제 상황들에 상당히 부합하기 때문이다. 일 실린더 안에 포함된 가스량의 압축을 위해서는 회전 속도와 무관하게 항상 동일한 힘이 필요하기 때문에, 상기와 같은 사실은 특히 이를 통해 야기되는 가속 토크 또는 제동 토크에도 적용된다. 이 경우, 하기의 식,

가 적용되고, 상기 식에서 J는 연소 엔진의 관성 모멘트이며, 변수 분리법에 따라,

가 적용되고, 여기서 ω는 각속도이다. 상기 식을 적분함으로써 하기의 식,

이 얻어진다.
상기 식을 능동 신호 에지들 또는 기준 신호 에지들에 상응하는 각도로서의 각도( 및
및  )를 갖는 예측 범위 내 및 기준 범위 내에서 2개의 이웃하는 기간과 관계시키면, 전술한 가정에 상응하게 상기 두 범위의 토크 작용이 동일해진다. 따라서, 하기의 식,
)를 갖는 예측 범위 내 및 기준 범위 내에서 2개의 이웃하는 기간과 관계시키면, 전술한 가정에 상응하게 상기 두 범위의 토크 작용이 동일해진다. 따라서, 하기의 식,

이 적용되며, 상기 식에서 Δφ는 바로 연속하는 2개의 능동 신호 에지 간의 균일한 각도 간격 또는 인코더 휠의 2개 톱니의 간격이며, Δti는 제1 기간이고, Δti -1은 제2 기간이며, Δti -m은 1 기준 기간이고, Δti -m-1은 제2 기준 기간이다. 각도 간격(Δφ)이 일정하므로, 하기의 식,

으로 간소화된다.
즉, 제1 기준 기간(Δti -m)과 제2 기준 기간(Δti -m-1) 간의 차에 상응하는 인코더 휠의 운동 변동을 야기하는 데 필요한 토크 작용이 제1 기간(Δti) 및 제2 기간(Δti-1)에 전용될 수 있다.
앞서 언급한 방법에 비해 제안된 방법의 장점은, 예를 들어 회전 속도 증가 또는 회전 속도 감소의 경우, 다시 말해 기준 범위와 예측 범위가 동일한 평균 회전 속도에 놓여 있지 않은 경우에 더 현실적인 예측이 구현될 수 있다는 데 있다.
제안된 방법에서는, 예를 들어 엔진 가속 시, 제시된 변환 시 제1 기준 기간(Δti-m)과 제2 기준 기간(Δti -m-1) 간의 차의 절대값이 감소하며, 다시 말해 하기의 식,
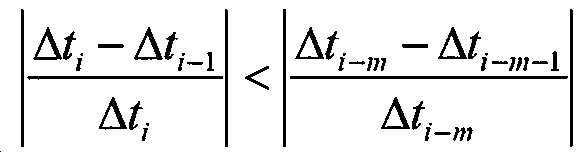
이 적용된다.
제안된 방법에서 엔진 감속 시에는, 변환 시 제1 기준 기간(Δti -m)과 제2 기준 기간(Δti-m-1) 간의 차의 절대값이 증가하며, 다시 말해 하기의 식
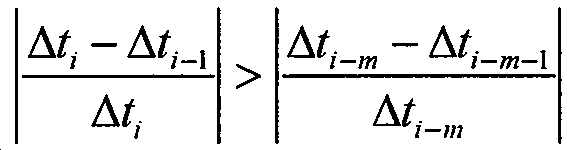
이 적용된다.
그와 달리, 앞에서 언급한 방법의 경우에는, 기간들의 상대 비율이 동일하며, 다시 말해 하기의 식,
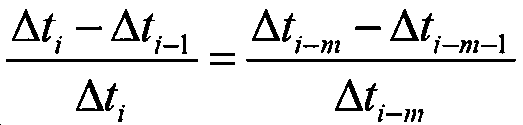
이 적용된다.
다시 말해서, 제안된 방법은, 회전 속도 변동이 회전 속도와 무관한 주기적인 토크로 인해 회전 속도에 반비례해서 감소한다는 점을 고려한다. 그와 달리, 앞서 언급한 방법은 상반된 비례 원칙을 잘못 표현하고 있으며, 다시 말해 회전 속도 변동이 회전 속도에 직접 비례한다고 표현한다.
바람직하게는, 제1 기간이 하기의 공식,

에 따른 제2 기간으로부터 결정되거나, 상기 공식의 테일러 급수 전개(Taylor series expansion)로부터 산출됨으로써, 토크 작용이 제1 기간 및 제2 기간에 전용된다.
상기 식을 풀면 제1 기간에 대해 전술한 공식이 얻어진다. 이러한 방식으로, 매우 간단하게 제1 기간이 제2 기간의 함수로서 그리고 제1 및 제2 기준 기간의 함수로서 형성되고 결정된다.
이 경우, 바람직하게는 테일러 급수 전개로서의 공식이 고려되며, 테일러 급수 전개는 적어도 1차까지, 특히 적어도 2차까지 사용된다. 상기 공식에서는, 예를 들어 제어 장치와 같은 계산 유닛에서 주로 매우 복잡한 계산을 통해서만 산출될 수 있는 근(root)이 발생하기 때문에, 상기 식은 더욱 간단하고 신속한 계산을 위한 테일러 급수 전개에 의해 간소화될 수 있다. 이와 관련하여, 하기의 식,

이 적용되는 것으로 가정되며, 이는 본원에서 매우 우수한 근사에서 충족되었다. 이 경우, 하기의 식,

에 의해, 하기의 식,
으로서의 2차 테일러 급수 전개에서 제1 기간을 구할 수 있다.
대안적으로, 상기 공식에서의 제곱근을 특성 곡선 및/또는 룩업 테이블(look up table)를 고려해서 결정하는 것도 바람직하다. 이와 같은 방식으로도, 계산 유닛에서의 복잡한 근 계산이 회피될 수 있다.
제1 기간이 아직 검출되지 않은 신호 에지 및 이미 검출되었거나 결정된 신호 에지에 의해 제한되거나, 대안적으로 제1 기간이 아직 검출되지 않은 2개의 신호 에지에 의해 제한되는 것이 바람직하다. 여기서, 검출된 신호 에지는 회전 속도 센서에 의해 검출된 신호 내에 이미 존재하는 신호 에지를 의미하는 한편, 결정된 신호 에지는 추정된, 특히 본원에서 제안된 방법에 따라 추정된 신호 에지를 의미할 수도 있다. 즉, 이미 검출된 신호 에지를 갖는 전술한 제1 대안에서는, 이미 검출된 제2 신호 에지에서부터 추가로 검출될 그 다음 신호 에지까지 경과하는 제1 기간이 추정될 수 있다. 따라서, 추가로 검출될 신호 에지가 놓일 짧은 시간 간격만으로도 매우 정확한 추정 또는 예측이 가능하다. 이 경우, 이미 결정된 신호 에지를 갖는 전술한 제1 대안에서는, 이미 결정된, 즉, 예를 들어 추정된 제2 신호 에지에서부터 추가로 검출될 그 다음 신호 에지까지 경과하는 제1 기간이 추정될 수 있다. 이러한 방식으로, 예를 들어 이 방법을 여러 번 적용함으로써, 훨씬 더 이전의 기간에 대한 예측이 가능해진다. 앞에서 언급한 제2 대안에서는, 예를 들어 훨씬 더 나중의 제1 기간이 직접 추정될 수 있다.
바람직하게, 상기 기간들은 각각 바로 연속하는 2개의 신호 에지에 의해 제한되고, 상기 기준 기간들은 각각 바로 연속하는 2개의 기준 신호 에지에 의해 제한된다. 이러한 방식으로, 2개의 기간 또는 기준 기간 간의 미세한 차이만으로도 매우 정확한 예측이 가능하다.
바람직하게는, 추정된 제1 기간을 고려해서, 제1 기간을 제한하는 2개의 신호 에지 간의 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보가 도출된다. 도입부에서 이미 언급한 바와 같이, 아직 검출되지 않은 신호 에지들의 범위에 대한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보에 대해서는 상응하는 기간의 추정 또는 예측이 필요하다. 제안된 방법으로 상기 기간의 매우 정확한 추정이 가능하기 때문에, 제안된 방법은 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보를 도출하는 데 매우 적합하다.
각도 시계(angle clock), 각도-시간 환산, 회전 속도 예측을 위한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보가 스타터 제어 및/또는 분사 프로그래밍을 위해 사용되는 것이 바람직하다. 이와 같은 적용예는 특히, 제안된 방법에 의해 제공될 수 있는 매우 정확한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보를 필요로 하는 자동차에 적용되는 예이다. 따라서, 일반적으로 크랭크 샤프트의 정확한 정지 위치를 필요로 하는 스타터 제어를 위해, 전술한 복수의 미래 시점의 기간을 추정하기 위한 가능 방법으로써, 연소 엔진의 코스팅 시 크랭크 샤프트가 정지하게 되는 크랭크 샤프트 각도가 정확하게 결정될 수 있다. 분사 프로그래밍에서는 예를 들어, 특히 향후의 분사 과정들이 상호 매우 짧은 시간 간격을 두고 실시되는 경우에, 목표한 대로 이들 분사 과정의 매우 정밀한 시간적 조정이 수행될 수 있다.
본 발명에 따른 계산 유닛, 예컨대 자동차의 제어 장치는, 특히 프로그램 기술적으로, 본 발명에 따른 방법을 수행하도록 설계된다.
이 방법을 컴퓨터 프로그램 형태로 구현하는 것도 바람직한데, 그 이유는 특히 실행 측 제어 장치가 또 다른 작업들을 위해서도 이용됨에 따라 어차피 존재하는 경우에는, 상기 방식이 특히 적은 비용을 야기하기 때문이다. 컴퓨터 프로그램을 제공하기에 적합한 데이터 캐리어는 특히, 예컨대 하드 디스크, 플래시 메모리, EEPROM, DVD 등과 같은 자기 메모리, 광학 메모리 및 전기 메모리이다. 컴퓨터 네트워크(인터넷, 인트라넷 등)를 통한 프로그램의 다운로드도 가능하다.
본 발명의 또 다른 장점들 및 실시예들은 상세한 설명 및 첨부된 도면을 참조한다.
본 발명은, 일 실시예를 토대로 도면에 개략적으로 도시되어 있고, 이하에서 도면을 참조하여 기술된다.
도 1a 및 도 1b는 회전 속도 센서를 구비한 인코더 휠을 두 가지 상이한 모습으로 개략적으로 도시한 도면이다.
도 2는 회전 속도 센서의 신호 파형을 도시한 그래프이다.
도 3은 본 발명에 따른 방법의 한 바람직한 실시예에서 사용될 수 있는 것과 같은 기간 및 기준 기간을 도시한 그래프이다.
도 4a 및 도 4b는 본 발명에 따르지 않는 한 방법과 본 발명에 따른 한 방법의 바람직한 일 실시예에서, 추정된 기간 대 실제 기간의 비를 비교한 결과를 도시한 그래프이다.
도 2는 회전 속도 센서의 신호 파형을 도시한 그래프이다.
도 3은 본 발명에 따른 방법의 한 바람직한 실시예에서 사용될 수 있는 것과 같은 기간 및 기준 기간을 도시한 그래프이다.
도 4a 및 도 4b는 본 발명에 따르지 않는 한 방법과 본 발명에 따른 한 방법의 바람직한 일 실시예에서, 추정된 기간 대 실제 기간의 비를 비교한 결과를 도시한 그래프이다.
도 1a에는, 크랭크 샤프트(110)를 구비한 연소 엔진(100)이 개략적으로 도시되어 있다. 크랭크 샤프트(110)에는, 크랭크 샤프트(110)와 일체로 회전하도록 고정 연결된 인코더 휠(120)이 배치되어 있다. 또한, 인코더 휠(120)의 스캐닝을 토대로 해서 신호를 발생시키는 관련 회전 속도 센서(130)도 도시되어 있다. 이 경우, 회전 속도 센서(130)는 예를 들어 적합한 위치에 고정 배치될 수 있다.
또한, 연소 엔진(110)을 제어하도록 설계된 제어 장치로서 형성된 계산 유닛(140)도 도시되어 있다. 또한, 계산 유닛(140)은 회전 속도 센서(130)에 의해 발생한 신호를 수집할 수 있다.
도 1b에는, 인코더 휠(120) 및 회전 속도 센서(130)의 정면도가 도시되어 있다. 본 도면에는, 인코더 휠의 외측 에지에 형성된 톱니들(121)이 도시되어 있다. 일반적으로 톱니들은  의 간격으로 배치되며, 다시 말해 60개의 톱니가 제공된다. 본 도면에 도시된 예에서는 편의상 톱니 수가 더 적게 도시되어 있다.
의 간격으로 배치되며, 다시 말해 60개의 톱니가 제공된다. 본 도면에 도시된 예에서는 편의상 톱니 수가 더 적게 도시되어 있다.
회전 속도 센서(130)는 예를 들어 코일을 가질 수 있는데, 다시 말해 유도 센서(inductive sensor)로서 형성될 수 있다. 이러한 방식으로, 회전 속도 센서(130)의 코일 내에서 신호가 유도되고, 이 신호는 톱니들(121)에 의해 또는 각각 2개의 톱니 사이에 놓인 갭(gap)에 의해 형성된다.
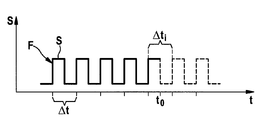
이제, 도 2에는, 인코더 휠을 스캐닝할 때 회전 속도 센서에 의해 제공되는 신호(S)가 도시되어 있다. 이와 관련하여 신호(S)가 시간(t)에 대해 도시되어 있다.
이때, 신호(S)는, 상승 및 하강하는 신호 에지를 갖는 사각형 파형을 보인다. 이와 같은 상승 및 하강 신호 에지는, 인코더 휠의 톱니들이 회전 속도 센서 근방을 통과하여 회전함으로써 발생한다. 연소 엔진의 회전 속도 또는 크랭크 샤프트 각도를 결정하기 위해, 일반적으로 2개의 연속하는 상승 신호 에지 또는 하강 신호 에지의 시간 간격이 검출된다. 이 경우, 불변의 각도(Δφ)에 의해 회전 속도를 매우 간단히 산출할 수 있다.
본 경우, 예를 들어 상승 신호 에지는 능동 신호 에지(F)로서, 다시 말해 회전 속도를 결정하기 위해 사용되는 신호 에지로서 선택된다. 이때, 연속하는 2개의 능동 신호 에지(F)의 시간 간격이 기간 또는 증분 지속 시간(Δt)을 지시한다. 도시된 예에서는, 시점(t0)까지의 신호(S)가 이미 검출되었고, 이는 실선으로 표시되어 있다.
이제, 도 3에는, 본 발명에 따른 방법의 한 바람직한 실시예에서 사용될 수 있는 바와 같은 기간 및 기준 기간이 도시되어 있다. 이와 관련하여 기간(Δt)이 시간(t)에 대해 도시되어 있다. 여기서 V는, 2개의 상이한 회전 속도 범위에 대해 시간(t)에 걸친 기간(Δt)의 파형을 나타낸다. 좌측 부분은 상응하게 더 짧은 기간을 갖는 더 높은 회전 속도에서의 파형을 보여주고, 우측 부분은 더 낮은 회전 속도 및 상응하게 더 긴 기간에서의 파형을 보여준다.
또한, 파형(V)을 통해, 하나의 회전 속도 범위 내에서도 기간이 일정하지 않고 변동한다는 사실을 알 수 있다. 그 이유는, 연소 엔진의 일 연소 주기에 걸쳐 회전 속도가 평균적으로 일정해도, 오프셋 실린더가 크랭크 샤프트에 가하는 상이한 토크들로 인해 회전 속도가 변하기 때문이다.
계속해서 파형(V)의 우측 부분에는 제1 기간(Δti) 및 제2 기간(Δti - 1)이 도시되어 있다. 파형(V)의 좌측 부분에는, 제1 기준 기간(Δti -m) 및 제2 기준 기간(Δti-m-1)이 도시되어 있다. 이때, 제1 기간은 예를 들어 도 2에 도시된 제1 기간(Δti), 다시 말해 선행하는 제한 능동 신호 에지가 아직 회전 속도 센서에 의해 검출되지 않은 제1 기간(Δti)일 수 있다.
이때, 기간 및 기준 기간은, 예를 들어 4기통 엔진에서 일반적으로 180°에 달하는 실린더 간격( )만큼 오프셋되어 있다. 이러한 방식으로, 크랭크 샤프트에 작용하는 각도 의존적 토크가 두 가지 경우 모두 동일한 점이 보장된다. 이는, 2개의 기준 기간에 대한 기준 토크[
)만큼 오프셋되어 있다. 이러한 방식으로, 크랭크 샤프트에 작용하는 각도 의존적 토크가 두 가지 경우 모두 동일한 점이 보장된다. 이는, 2개의 기준 기간에 대한 기준 토크[ ] 및 2개의 기간에 대한 예측 토크[
] 및 2개의 기간에 대한 예측 토크[ ]로써 도시되어 있다.
]로써 도시되어 있다.
따라서, 제1 기간은 전술한 공식들에 따라 제2 기간 그리고 제1 및 제2 기준 기간으로부터 산출되거나 계산된다.
도 4a 및 도 4b에는, 본 발명에 따르지 않은 방법과 본 발명에 따른 방법의 한 바람직한 실시예에서, 시간(t)에 걸쳐 추정된 기간 대 실제 기간의 비(Δt/Δt')가 각각 도시되어 있다.
이상적인 경우, 상기 비는 일정하게 값 1을 취해야 한다. 이때, 기준 기간으로서는, 예를 들어 계산 유닛 내에 있을 수 있는 회전 속도 센서의 신호 메모리로부터 유래하는 기간들이 참조된다. 이 경우, 기준 기간은 예를 들어 과거의 일 연소 주기이다.
제안된 방법(도 4b 참조)은, 기준 기간들의 가용 시점에, 본 경우에는 시점(t1)부터 비로소 활성화된다. 도면을 통해 알 수 있는 사실은, 본 발명에 따르지 않은 방법(도 4a 참조)의 경우, 활성화 이후에, 본 경우에는 역시 시점(t1)에서, 이상값 1과의 편차가 본원에 제안된 방법의 경우보다 훨씬 더 크다는 것이다.
Claims (11)
- 회전 속도 센서(130)의 일 신호(S)의 2개의 연속하는 능동 신호 에지(F) 중 적어도 하나는 아직 검출되지 않은 상태에서 이들 신호 에지 사이의 제1 기간(Δti)을 추정하기 위한 방법으로서,
상기 회전 속도 센서(130)는 연소 엔진(100)의 인코더 휠(120)을 스캐닝함으로써 상기 연소 엔진(100)의 회전 속도를 결정하기 위한 신호(S)를 제공하며,
상기 2개의 연속하는 능동 신호 에지(F) 사이의 제2 기간(Δti - 1)이 결정되고, 상기 두 신호 에지 중 적어도 하나는 제1 기간(Δti)을 제한하지 않으며,
2개의 연속하는 능동 기준 신호 에지 사이에서 제1 기준 기간(Δti -m) 및 제2 기준 기간(Δti-m-1)이 각각 결정되며,
각각의 기준 신호 에지와 상응하는 신호 에지는 각각 일 실린더 간격()의 동일한 배수만큼 오프셋되어 있으며,
제1 기준 기간(Δti -m)과 제2 기준 기간(Δti -m-1) 간의 차에 상응하는 인코더 휠(120)의 동작 변동을 야기하는 데 필요한 토크 작용이 상기 제1 기간(Δti) 및 상기 제2 기간(Δti - 1)에 전용됨으로써, 상기 제1 기간(Δti)이 상기 제2 기간(Δti -1)을 고려해서 추정되는, 추정 방법. - 제1항에 있어서, 제1 기간(Δti)은 제2 기간(Δti - 1)으로부터 하기의 공식,

에 따라 또는 상기 공식의 테일러 급수 전개로부터 산출됨으로써, 토크 작용이 제1 기간(Δti) 및 제2 기간(Δti - 1)에 전용되며, 상기 공식에서 Δti는 제1 기간을 나타내고, Δti -1은 제2 기간을 나타내며, Δti -m은 제1 기준 기간을 나타내고, Δti-m-1은 제2 기준 기간을 나타내는, 추정 방법. - 제2항에 있어서, 제1 기간(Δti)은 제2 기간(Δti - 1)으로부터 상기 공식의 테일러 급수 전개에 따라 산출되며, 상기 테일러 급수 전개는 적어도 1차까지 사용되는, 추정 방법.
- 제2항에 있어서, 제1 기간(Δti)은 제2 기간(Δti - 1)으로부터 상기 공식에 따라 산출되며, 상기 공식에 나타나는 제곱근은 특성 곡선 및/또는 룩업 테이블을 고려해서 결정되는, 추정 방법.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 제1 기간(Δti)이 아직 검출되지 않은 신호 에지 및 이미 검출된 신호 에지에 의해 제한되거나, 제1 기간(Δti)이 아직 검출되지 않은 2개의 신호 에지에 의해 제한되는, 추정 방법.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 기간(Δti, Δti - 1)은 각각 바로 연속하는 2개의 신호 에지에 의해 제한되고, 상기 기준 기간(Δti -m, Δti -m-1)은 바로 연속하는 2개의 기준 신호 에지에 의해 제한되는, 추정 방법.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 추정된 제1 기간(Δti)을 고려해서, 제1 기간(Δti)을 제한하는 2개의 신호 에지 간의 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보가 도출되는, 추정 방법.
- 제7항에 있어서, 각도 시계, 각도-시간 환산, 회전 속도 예측을 위한 회전 속도 정보 및/또는 크랭크 샤프트 각도 정보가 스타터 제어 및/또는 분사 프로그래밍을 위해 사용되는, 추정 방법.
- 제1항 내지 제4항 중 어느 한 항에 따른 방법을 수행하도록 설계된 계산 유닛(140).
- 계산 유닛(140)에서 실행될 경우, 상기 계산 유닛(140)이 제1항 내지 제4항 중 어느 한 항에 따른 방법을 수행하도록 하며 기계 판독 가능 저장 매체에 저장된 컴퓨터 프로그램.
- 제10항에 따른 컴퓨터 프로그램이 저장된 기계 판독 가능 저장 매체.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015221634.9A DE102015221634A1 (de) | 2015-11-04 | 2015-11-04 | Verfahren zur Prädiktion einer Zeitdauer zwischen zwei Signalflanken eines Drehzahlsensorsignals |
| DE102015221634.9 | 2015-11-04 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170052509A true KR20170052509A (ko) | 2017-05-12 |
Family
ID=58545646
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160145850A Withdrawn KR20170052509A (ko) | 2015-11-04 | 2016-11-03 | 회전 속도 센서 신호의 2개의 신호 에지 사이의 기간을 예측하기 위한 방법 |
Country Status (3)
| Country | Link |
|---|---|
| KR (1) | KR20170052509A (ko) |
| CN (1) | CN107023414A (ko) |
| DE (1) | DE102015221634A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200091392A (ko) * | 2017-12-05 | 2020-07-30 | 젯트에프 프리드리히스하펜 아게 | 회전 속도 측정을 위한 구배 결정 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017222863A1 (de) * | 2017-12-15 | 2019-06-19 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Bestimmung einer Drehwinkelposition einer Kurbelwelle einer Brennkraftmaschine |
| CN109557332B (zh) * | 2018-12-25 | 2020-10-30 | 西安翔迅科技有限责任公司 | 一种基于Taylor算法的转速信号转换装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004029065A1 (de) * | 2004-06-16 | 2006-01-26 | Siemens Ag | Kurbelwellensynchrone ERfassung analoger Signale |
| FR2950388B1 (fr) * | 2009-09-23 | 2012-04-20 | Peugeot Citroen Automobiles Sa | Procede de prediction du regime de rotation d'un vilebrequin de moteur en phase de fin de rotation et application du procede a la prediction du cylindre d'arret |
| FR2964707B1 (fr) * | 2010-09-14 | 2012-09-28 | Peugeot Citroen Automobiles Sa | Procede d'autorisation d'engagement d'un demarreur avec un moteur et vehicule comprenant un calculateur pour la mise en ?uvre de ce procede |
| DE102012210301B3 (de) * | 2012-06-19 | 2013-09-05 | Continental Automotive Gmbh | Bestimmen der in einem Zylinder einer Brennkraftmaschine freigesetzten Energiemenge mittels einer Auswertung von Zahnzeiten einer mit einer Kurbelwelle verbundenen Geberscheibe |
-
2015
- 2015-11-04 DE DE102015221634.9A patent/DE102015221634A1/de not_active Withdrawn
-
2016
- 2016-11-03 CN CN201610953776.4A patent/CN107023414A/zh active Pending
- 2016-11-03 KR KR1020160145850A patent/KR20170052509A/ko not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200091392A (ko) * | 2017-12-05 | 2020-07-30 | 젯트에프 프리드리히스하펜 아게 | 회전 속도 측정을 위한 구배 결정 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107023414A (zh) | 2017-08-08 |
| DE102015221634A1 (de) | 2017-05-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5699253A (en) | Nonlinear dynamic transform for correction of crankshaft acceleration having torsional oscillations | |
| KR102470322B1 (ko) | 내연 엔진의 역 회전을 검출하는 방법 및 장치 | |
| EP1402165B1 (en) | Method to determine tdc in an internal combustion engine | |
| Lin et al. | A new method for measuring engine rotational speed based on the vibration and discrete spectrum correction technique | |
| US8099998B2 (en) | Apparatus and method for estimating stopped engine crank angle | |
| US20070192019A1 (en) | Method for estimating quantity of fuel injected | |
| US9658082B2 (en) | Method of determining the instantaneous angular position of a crankshaft target optimized for starting the engine | |
| KR20170052509A (ko) | 회전 속도 센서 신호의 2개의 신호 에지 사이의 기간을 예측하기 위한 방법 | |
| JP3380244B2 (ja) | 回転数の勾配を求める装置 | |
| US10234262B2 (en) | Sensor for measuring angular position, and measurement compensation method | |
| RU2015114707A (ru) | Способ оценки скорости вращения двигателя в заданном положении | |
| US5386810A (en) | System and method for controlling a solenoid-valve-controlled fuel-metering device, particularly for a diesel gasoline engine | |
| JP2009508035A (ja) | エンジンの回転方向の反転を検出する方法 | |
| US7415351B2 (en) | Method and device for detecting an angular position signal for an internal-combustion engine | |
| US10969285B2 (en) | Engine torque estimating device, engine control system, and engine torque estimation method | |
| EP2530287A1 (en) | Apparatus and method for estimating a combustion torque of an internal combustion engine | |
| CN104481694A (zh) | 一种发动机曲轴转速自诊断方法 | |
| US9184679B2 (en) | Method for predicting the duration of a future time interval | |
| US7194899B1 (en) | Method of estimating crack angles and rotation speeds of engine | |
| JP4533430B2 (ja) | 基準信号発生装置及び方法 | |
| JPH05180051A (ja) | 電磁弁制御の燃料調量装置を制御する方法及び装置 | |
| EP1930571A2 (en) | Method of cylinder pressure sensor data/angle capture for low and high resolution | |
| JPH08312445A (ja) | 燃焼中の失火識別方法 | |
| US10330569B2 (en) | Method for determining the engine torque delivered by a multi-cylinder engine | |
| US7543486B2 (en) | Method of estimating the duration of target wheel teeth |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20161103 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |