KR20170053912A - 자동 자세 제어 기능을 갖춘 작업기 - Google Patents
자동 자세 제어 기능을 갖춘 작업기 Download PDFInfo
- Publication number
- KR20170053912A KR20170053912A KR1020150156430A KR20150156430A KR20170053912A KR 20170053912 A KR20170053912 A KR 20170053912A KR 1020150156430 A KR1020150156430 A KR 1020150156430A KR 20150156430 A KR20150156430 A KR 20150156430A KR 20170053912 A KR20170053912 A KR 20170053912A
- Authority
- KR
- South Korea
- Prior art keywords
- frame
- power
- work machine
- shaft
- upper fixed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B63/00—Lifting or adjusting devices or arrangements for agricultural machines or implements
- A01B63/02—Lifting or adjusting devices or arrangements for agricultural machines or implements for implements mounted on tractors
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B39/00—Machines specially adapted for working soil on which crops are growing
- A01B39/12—Machines specially adapted for working soil on which crops are growing for special purposes, e.g. for special culture
- A01B39/18—Machines specially adapted for working soil on which crops are growing for special purposes, e.g. for special culture for weeding
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B63/00—Lifting or adjusting devices or arrangements for agricultural machines or implements
- A01B63/02—Lifting or adjusting devices or arrangements for agricultural machines or implements for implements mounted on tractors
- A01B63/06—Lifting or adjusting devices or arrangements for agricultural machines or implements for implements mounted on tractors operated mechanically by tractor motor
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/006—Control or measuring arrangements
- A01D34/008—Control or measuring arrangements for automated or remotely controlled operation
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/01—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus
- A01D34/02—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having reciprocating cutters
- A01D34/03—Mowers; Mowing apparatus of harvesters characterised by features relating to the type of cutting apparatus having reciprocating cutters mounted on a vehicle, e.g. a tractor, or drawn by an animal or a vehicle
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Zoology (AREA)
- Agricultural Machines (AREA)
Abstract
Description
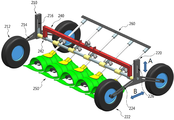
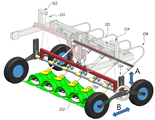
도 2는 본 발명의 일 실시예에 따른 후면 부착형 작업기를 도시한 사시도이다.
도 3은 도 2의 후면 부착형 작업기 중 상부 고정 프레임부를 도시한 사시도이다.
도 4는 도 2의 후면 부착형 작업기 중 하부 작업기부를 도시한 사시도이다.
도 5는 도 4의 하부 작업기부가 도 3의 상부 고정 프레임부와 연결된 상태를 도시한 사시도이다.
도 6은 도 2의 후면 부착형 작업기 중 상하부 연결 지지부를 도시한 사시도이다.
110a : 좌측 프레임 110b : 우측 프레임
110c : 부착 프레임 110d : 레일 프레임
112 : 좌측 스프링 지지대 114 : 우측 스프링 지지대
116 : 좌측 슬라이딩 레일 118 : 우측 슬라이딩 레일
120 : 동력 연결 유닛 130 : 작업기 연결 히치
140 : 변속 기어 모듈 150 : 동력 전달축
160 : 동력 전달 모듈 162 : 구동 풀리부
162a : 구동 풀리판 162b : 메인 풀리
162c : 서브 풀리들 164 : 클러치부
200 : 하부 작업기부 210 : 좌측 바퀴 고정 프레임
212 : 좌측 바퀴 214 : 좌측 바퀴 가이드홈
216 : 좌측 높이 조절 가이드홈 220 : 우측 바퀴 고정 프레임
222 : 우측 바퀴 224 : 우측 바퀴 가이드홈
226 : 우측 높이 조절 가이드홈 230 : 작업기 고정축
240 : 작업기축 지지 프레임 242 : 축 지지 베어링
250 : 작업기 모듈 252 : 작업기 몸체부
254 : 작업기 구동축 256 : 작업기 구동축 지지유닛
258 : 동력연결 플렉시블 조인트 260 : 연결 지지대
300 : 상하부 연결 지지부 310 : 좌측 지지 스프링
320 : 우측 지지 스프링 330 : 슬라이딩 연결모듈
340 : 좌측 판 스프링 350 : 우측 판 스프링
360 : 이중 로울러 힌지
Claims (18)
- 외부의 본체의 후면에 부착되어 상기 본체로부터 동력을 전달받는 상부 고정 프레임부;
상기 상부 고정 프레임의 하부에 배치되고, 상기 상부 고정 프레임부로부터 동력을 제공받아 작업을 수행하는 하부 작업기부; 및
상기 상부 고정 프레임부 및 상기 하부 작업기부 사이를 연결하고, 상기 하부 작업기부의 자세 제어를 위한 동적 유동성을 제공하는 상하부 연결 지지부를 포함하고,
상기 상하부 연결 지지부는
상기 상부 고정 프레임부 및 상기 하부 작업기부 사이를 연결하는 좌측 및 우측 지지 스프링들;
상기 좌측 및 우측 지지 스프링들 사이에 배치되고, 슬라이딩 이동이 가능하도록 상기 상부 고정 프레임부와 결합된 슬라이딩 연결모듈; 및
상기 슬라이딩 연결모듈 및 상기 하부 작업기부 사이를 연결하는 좌측 및 우측 판 스프링들을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제1항에 있어서, 상기 좌측 및 우측 지지 스프링들은
상기 본체에서 상기 상부 고정 프레임부를 향하는 제1 방향과 수직한 제2 방향을 따라 이격되어 배치되고,
상기 슬라이딩 연결모듈은
상기 제1 및 제2 방향들에 수직한 제3 방향을 따라 슬라이딩 이동이 가능하도록 상기 상부 고정 프레임부와 결합되며,
상기 좌측 및 우측 판 스프링들은
상기 제2 방향을 따라 이격되어 배치되어 상기 슬라이딩 연결모듈 및 상기 하부 작업기부 사이를 연결하는 것을 특징으로 하는 후면 부착형 작업기. - 제2항에 있어서, 상기 슬라이딩 연결모듈은
상기 좌측 및 우측 판 스프링들과 각각 대응되도록 배치되고, 각각이 상기 제3 방향을 따라 슬라이딩 이동이 가능하도록 상기 상부 고정 프레임부와 결합된 좌측 및 우측 슬라이딩 유닛들을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제3항에 있어서, 상기 상하부 연결 지지부는
상기 좌측 및 우측 판 스프링들 사이에 배치되어 상기 슬라이딩 연결모듈 및 상기 하부 작업기부 사이를 연결하고, 상기 슬라이딩 연결모듈 및 상기 하부 작업기부 사이의 두 포인트들에서 각각 회전이 가능한 이중 로울러 힌지를 더 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제4항에 있어서, 상기 하부 작업기부는
좌측 바퀴를 고정시키는 좌측 바퀴 고정 프레임;
우측 바퀴를 고정시키는 우측 바퀴 고정 프레임;
상기 제2 방향을 따라 길게 연장되어, 상기 좌측 및 우측 바퀴 고정 프레임들 사이를 연결하는 작업기 고정축;
상기 제2 방향을 따라 형성되고, 적어도 2개의 축 지지 베어링들에 의해 상기 작업기 고정축과 연결되며, 상기 상하부 연결 지지부에 의해 상기 상부 고정 프레임부에 지지되는 작업기축 지지 프레임; 및
상기 제2 방향을 따라 일정 간격으로 배치되어 상기 작업기 고정축과 결합되며, 상기 상부 고정 프레임부로부터 각각 동력을 제공받아 작업을 수행하는 복수의 작업기 모듈들을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제5항에 있어서, 상기 좌측 바퀴 고정 프레임에는
상기 제1 방향으로 따라 이격되어 배치된 한 쌍의 좌측 바퀴들이 각각 삽입되어 고정되고, 상기 좌측 바퀴들의 간격이 조절되도록 한 쌍의 좌측 바퀴 가이드홈들이 형성되고,
상기 우측 바퀴 고정 프레임에는
상기 제1 방향으로 따라 이격되어 배치된 한 쌍의 우측 바퀴들이 각각 삽입되어 고정되고, 상기 우측 바퀴들의 간격이 조절되도록 한 쌍의 우측 바퀴 가이드홈들이 형성된 것을 특징으로 하는 후면 부착형 작업기. - 제5항에 있어서, 상기 좌측 바퀴 고정 프레임에는
상기 작업기 고정축의 좌측단이 삽입되어 고정되고, 상기 작업기 고정축의 좌측단이 상기 제3 방향을 따라 이동 가능하도록 좌측 높이 조절 가이드홈이 형성되고,
상기 우측 바퀴 고정 프레임에는
상기 작업기 고정축의 우측단이 삽입되어 고정되고, 상기 작업기 고정축의 우측단이 상기 제3 방향을 따라 이동 가능하도록 우측 높이 조절 가이드홈이 형성된 것을 특징으로 하는 후면 부착형 작업기. - 제5항에 있어서, 상기 상부 고정 프레임부는
메인 프레임;
상기 메인 프레임에 형성되고, 상기 좌측 및 우측 지지 스프링들과 각각 연결되어 상기 작업기축 지지 프레임을 지지하는 좌측 및 우측 스프링 지지대들;
상기 메인 프레임에 결합되고, 상기 좌측 및 우측 슬라이딩 유닛들과 각각 연결되어 상기 제3 방향으로의 슬라이딩 이동을 가이드하는 좌측 및 우측 슬라이딩 레일들;
상기 메인 프레임에 결합되고, 상기 본체의 동력 출력 장치와 연결되어 상기 동력 출력 장치로부터 동력을 전달받는 동력 연결 유닛;
상기 메인 프레임에 결합되고, 상기 메인 프레임을 상기 본체의 후면에 연결시키는 작업기 연결 히치;
상기 동력 연결 유닛으로부터 동력을 제공받아 전달하는 동력 전달축; 및
상기 동력 전달축과 연결되어 상기 동력 전달축으로부터 전달된 동력을 상기 작업기 모듈들 각각으로 전달하는 동력 전달 모듈을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제8항에 있어서, 상기 메인 프레임은
상기 제1 방향을 따라 형성되고, 상기 좌측 스프링 지지대가 연결된 좌측 프레임;
상기 제2 방향으로 이격되어 상기 좌측 프레임과 대응되도록 상기 제1 방향을 따라 형성되고, 상기 우측 스프링 지지대가 연결된 우측 프레임;
상기 좌측 및 우측 프레임들 사이를 연결하여 고정시키고, 상기 동력 연결 유닛 및 상기 작업기 연결 히치가 연결된 부착 프레임; 및
상기 좌측 및 우측 프레임들 사이를 연결하여 고정시키고, 상기 좌측 및 우측 슬라이딩 레일들이 연결된 레일 프레임을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제9항에 있어서, 상기 동력 전달 모듈은
상기 좌측 및 우측 프레임들 사이를 연결하여 고정시키는 것을 특징으로 하는 후면 부착형 작업기. - 제10항에 있어서, 상기 부착 프레임은
상기 좌측 프레임의 앞단 및 상기 우측 프레임의 앞단 사이를 연결하고,
상기 동력 전달 모듈은
상기 좌측 프레임의 뒷단 및 상기 우측 프레임의 뒷단 사이를 연결하며,
상기 레일 프레임은
상기 부착 프레임 및 상기 동력 전달 모듈 사이에 배치되고,
상기 동력 전달축은
일단이 상기 동력 연결 유닛으로부터 동력을 제공받고, 상기 레일 프레임을 가로지르도록 상기 제1 방향을 따라 연장되어 타단이 상기 동력 전달 모듈과 연결되는 것을 특징으로 하는 후면 부착형 작업기. - 제10항에 있어서, 상기 동력 전달 모듈은
상기 좌측 및 우측 프레임들 사이를 연결하여 고정되고, 상기 동력 전달축으로부터 전달된 동력을 복수개로 분할하여 상기 작업기 모듈들 각각으로 전달하는 구동 풀리부을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제12항에 있어서, 상기 구동 풀리부는
상기 좌측 및 우측 프레임들 사이를 연결하여 고정시키는 구동 풀리판;
상기 구동 풀리판에 결합되고, 상기 동력 전달축과 연결되어 상기 동력 전달축으로부터 동력을 제공받는 메인 풀리; 및
상기 작업기 모듈들과 각각 대응되도록 상기 구동 풀리판에 결합되고, 타이밍 밸트에 의해 상기 메인 풀리로부터 동력을 제공받아 상기 작업기 모듈들 각각으로 전달시키는 복수의 서브 풀리들을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제13항에 있어서, 상기 작업기 모듈들 각각은
작업을 수행하는 작업기 몸체부;
상기 작업기 몸체부와 연결되고, 상기 서브 풀리들 중 하나로부터 동력을 제공받아 상기 작업기 몸체부로 전달하는 작업기 구동축; 및
상기 작업기 구동축을 상기 작업기 고정축에 연결시켜 지지하는 작업기 구동축 지지유닛을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제14항에 있어서, 상기 작업기 모듈들 각각은
상기 서브 풀리들 중 하나와 상기 작업기 구동축 사이를 연결하여, 상기 서브 풀리들 중 하나에서 제공된 동력을 상기 작업기 구동축으로 전달하는 동력연결 플렉시블 조인트를 더 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제14항에 있어서, 상기 작업기 몸체부는
제초 작업을 수행하는 제초기 유닛을 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제13항에 있어서, 상기 동력 전달 모듈은
상기 좌측 및 우측 프레임들 사이를 연결하여 고정되고, 상기 서브 풀리들에서 상기 작업기 모듈들로 각각 전달되는 동력을 허용 또는 차단시킬 수 있는 클러치부를 더 포함하는 것을 특징으로 하는 후면 부착형 작업기. - 제9항에 있어서, 상기 상부 고정 프레임부는
상기 부착 프레임에 결합되고, 상기 동력 연결 유닛 및 상기 동력 전달축 사이를 연결하여, 상기 동력 연결 유닛을 통해 출력되는 동력을 변속시켜 상기 동력 전달축으로 전달시키는 변속 기어 모듈을 더 포함하는 것을 특징으로 하는 후면 부착형 작업기.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150156430A KR101790014B1 (ko) | 2015-11-09 | 2015-11-09 | 자동 자세 제어 기능을 갖춘 작업기 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150156430A KR101790014B1 (ko) | 2015-11-09 | 2015-11-09 | 자동 자세 제어 기능을 갖춘 작업기 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170053912A true KR20170053912A (ko) | 2017-05-17 |
| KR101790014B1 KR101790014B1 (ko) | 2017-11-20 |
Family
ID=59048571
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150156430A Active KR101790014B1 (ko) | 2015-11-09 | 2015-11-09 | 자동 자세 제어 기능을 갖춘 작업기 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101790014B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200114328A (ko) * | 2019-03-28 | 2020-10-07 | 엘에스엠트론 주식회사 | 농업용 작업차량의 동력취출장치 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR200387020Y1 (ko) | 2005-03-17 | 2005-06-16 | 이동열 | 트랙터용 심토 작업기 |
-
2015
- 2015-11-09 KR KR1020150156430A patent/KR101790014B1/ko active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200114328A (ko) * | 2019-03-28 | 2020-10-07 | 엘에스엠트론 주식회사 | 농업용 작업차량의 동력취출장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101790014B1 (ko) | 2017-11-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5076042A (en) | Mowing machine | |
| DE50104348D1 (de) | Landwirtschaftliche Erntemaschine mit Seitengang | |
| JPH0116441B2 (ko) | ||
| TR201902648T4 (tr) | Toprak işleme makinası; en az bir yıldız tipi çapa aletinin bir sıra ekimde bir sıra üzerinde yükseklik kılavuzlamasına yönelik yöntem. | |
| KR101790014B1 (ko) | 자동 자세 제어 기능을 갖춘 작업기 | |
| US20050178567A1 (en) | Soil cultivating device | |
| US4236420A (en) | Wide-angle joint | |
| NO154372B (no) | Veivstangsystem saerlig for slaamaskiner. | |
| US2940534A (en) | Power take-off mechanism | |
| KR101248010B1 (ko) | 농작업 관리기 | |
| US4487267A (en) | Agricultural apparatus with tool supported thereon and wheel adjustment structure therefor | |
| KR102105925B1 (ko) | 가이드레일을 따라 주행하는 농기계 자동견인대차용 연결암 | |
| FR2698517A1 (fr) | Système d'attelage à positionnement multidirectionnel. | |
| KR102935971B1 (ko) | 농기계용 작업기 연결장치 | |
| KR102804516B1 (ko) | 멀티 링크를 구비한 농업용 관리기 | |
| KR102232031B1 (ko) | 주행본체 착탈형 마늘 파종기 지지장치 | |
| KR20150102511A (ko) | 베일러용 드로우 | |
| JP6901760B2 (ja) | 農作業機 | |
| JP2025163897A (ja) | 作業車両 | |
| CN109362333A (zh) | 一种新型可折叠割草机 | |
| KR101427326B1 (ko) | 예취날의 좌우기울기 조절가능한 가변형 농산물 수확기 | |
| KR102674760B1 (ko) | 너트런너의 자동 조심장치를 이용한 무한궤도 트랙 조립 시스템 | |
| CN221710406U (zh) | 一种小型山地拖拉机悬挂自适应地形平衡机构 | |
| ATE45661T1 (de) | Geraeteanbauvorrichtung fuer schlepper. | |
| KR101295661B1 (ko) | 집초기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20151109 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20170222 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20170904 |
|
| GRNT | Written decision to grant | ||
| PR0702 | Registration of establishment of national patent |
Patent event code: PR07021E01D Comment text: Registration of Establishment of National Patent Patent event date: 20171019 |
|
| PR1002 | Payment of registration fee |
Payment date: 20171019 End annual number: 20 Start annual number: 1 |
|
| PG1601 | Publication of registration |