KR20170065653A - 해양 환경 모니터링 시스템 - Google Patents
해양 환경 모니터링 시스템 Download PDFInfo
- Publication number
- KR20170065653A KR20170065653A KR1020177012471A KR20177012471A KR20170065653A KR 20170065653 A KR20170065653 A KR 20170065653A KR 1020177012471 A KR1020177012471 A KR 1020177012471A KR 20177012471 A KR20177012471 A KR 20177012471A KR 20170065653 A KR20170065653 A KR 20170065653A
- Authority
- KR
- South Korea
- Prior art keywords
- distance measurement
- detection
- signal
- marine environment
- radio detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
-
- G01S13/9307—
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/937—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of marine craft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/95—Radar or analogous systems specially adapted for specific applications for meteorological use
- G01S13/956—Radar or analogous systems specially adapted for specific applications for meteorological use mounted on ship or other platform
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/003—Transmission of data between radar, sonar or lidar systems and remote stations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4039—Means for monitoring or calibrating of parts of a radar system of sensor or antenna obstruction, e.g. dirt- or ice-coating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/505—Systems of measurement based on relative movement of target using Doppler effect for determining closest range to a target or corresponding time, e.g. miss-distance indicator
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/52—Discriminating between fixed and moving objects or between objects moving at different speeds
- G01S13/56—Discriminating between fixed and moving objects or between objects moving at different speeds for presence detection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
- G01S13/878—Combination of several spaced transmitters or receivers of known location for determining the position of a transponder or a reflector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
-
- G01S2007/4039—
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/41—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
- G01S7/415—Identification of targets based on measurements of movement associated with the target
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02A—TECHNOLOGIES FOR ADAPTATION TO CLIMATE CHANGE
- Y02A90/00—Technologies having an indirect contribution to adaptation to climate change
- Y02A90/10—Information and communication technologies [ICT] supporting adaptation to climate change, e.g. for weather forecasting or climate simulation
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Ocean & Marine Engineering (AREA)
- Radar Systems Or Details Thereof (AREA)
- Geophysics And Detection Of Objects (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
Description
도 1 은 일 구현형태에 따른, 해양 환경을 모니터링하기 위한 시스템의 다이어그램을 도시한다;
도 2 는 일 구현형태에 따른, 해양 환경을 모니터링하기 위한 방법의 다이어그램을 도시한다;
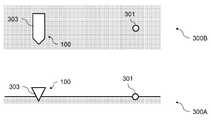
도 3 은 일 구현형태에 따른 모니터링 시나리오의 다이어그램을 도시한다; 그리고
도 4 는 일 구현형태에 따른, 해양 환경을 모니터링하기 위한 시스템의 다이어그램을 도시한다.
Claims (16)
- 해양 환경을 모니터링하는 시스템(100)으로서,
해양 환경에 있는 오브젝트(301)의 동기적 검출을 수행하고, 상기 해양 환경에 있는 오브젝트(301)의 위치에 각각 관련된 복수 개의 센서 신호를 통신 네트워크(107)를 거쳐 송신하며, 동기 신호를 수신하도록 구성되는 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)로서, 각각의 무선 검출 및 거리측정 디바이스(101, 103, 105)는 상기 동기 신호에 따라서 동작을 동기화하도록 구성되는, 복수 개의 무선 검출 및 거리측정 디바이스;
상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)의 동작을 동기화하기 위한 상기 동기 신호를 생성하고, 상기 동기 신호를 통신 네트워크(107)를 거쳐 상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)로 제공하도록 구성되는 동기화 소스(109); 및
상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)로부터 복수 개의 센서 신호를 수신하고, 상기 해양 환경에 있는 오브젝트(301)의 위치를 상기 복수 개의 센서 신호에 기초하여 결정하도록 구성되는 처리 디바이스(111)를 포함하는, 해양 환경 모니터링 시스템(100). - 제 1 항에 있어서,
각각의 무선 검출 및 거리측정 디바이스(101, 103, 105)는, 상기 동기 신호에 기초하여 송신 신호를 동기적으로 생성하고, 상기 해양 환경에 있는 오브젝트(301)를 향해 상기 송신 신호를 송신하며, 상기 송신 신호의 반사된 버전을 형성하는 반사 신호를 수신하고, 상기 송신 신호 및 반사 신호에 기초하여 센서 신호를 생성하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 2 항에 있어서,
각각의 무선 검출 및 거리측정 디바이스(101, 103, 105)는, 상기 송신 신호와 반사 신호 사이의 도플러 주파수 천이를 결정하고, 결정된 도플러 주파수 천이에 기초하여 상기 센서 신호를 생성하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)는, 미리 결정된 방위각 범위(azimuth range), 특히 360°의 방위각 범위를 연속적으로 모니터링하고, 상기 미리 결정된 방위각 범위 안에서 상기 해양 환경에 있는 오브젝트(301)의 동기적 검출을 수행하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105) 중 제 1 무선 검출 및 거리측정 디바이스는 제 1 센서 신호를 제공하도록 구성되고, 상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105) 중 제 2 무선 검출 및 거리측정 디바이스는 제 2 센서 신호를 제공하도록 구성되며, 상기 제 1 무선 검출 및 거리측정 디바이스 또는 제 2 무선 검출 및 거리측정 디바이스는 상기 제 1 센서 신호를 제 2 센서 신호와 결합시키도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 동기화 소스(109)는 상기 동기 신호를 생성하기 위해 글로벌 내비게이션 위성 시스템(GNSS) 수신기, 국부 발진기, 또는 이들의 조합을 포함하는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
상기 동기 신호는 기준 시간, 기준 주파수, 또는 기준 위상을 표시하고, 각각의 무선 검출 및 거리측정 디바이스(101, 103, 105)는 상기 기준 시간, 기준 주파수, 또는 기준 위상에 대하여 동작을 동기화하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 7 항 중 어느 한 항에 있어서,
상기 처리 디바이스(111)는, 상기 복수 개의 센서 신호, 특히 해류(ocean current) 속도, 해류 방향, 파랑(ocean wave) 높이, 파랑 주기, 파랑 주파수, 파랑 전파 방향, 파랑 스펙트럼, 풍속, 또는 풍향에 기초하여 상기 해양 환경의 기상학적 또는 해양학적 파라미터를 결정하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 8 항 중 어느 한 항에 있어서,
상기 처리 디바이스(111)는, 상태 추정 필터, 특히 칼만 필터 또는 입자 필터를 사용해서 복수 개의 센서 신호를 결합하여 상기 해양 환경에 있는 오브젝트(301)의 위치를 결정하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
상기 처리 디바이스(111)는, 상기 복수 개의 센서 신호에 기초하여 상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105) 중 무선 검출 및 거리측정 디바이스의 오동작을 검출하고, 상기 무선 검출 및 거리측정 디바이스의 오동작을 표시하는 표시자 신호를 생성하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 시스템은,
상기 해양 환경에 있는 추가적인 오브젝트로부터 유래하는 전자기 신호의 동기적 수신을 수행하고, 상기 해양 환경에 있는 추가적인 오브젝트의 위치에 각각 관련된 복수 개의 수신 신호를 상기 통신 네트워크(107)를 거쳐 송신하며, 추가적인 동기 신호를 수신하도록 구성되는 복수 개의 수신 디바이스로서, 각각의 수신 디바이스는 상기 추가적인 동기 신호에 따라서 동작을 동기화하도록 구성되는, 복수 개의 수신 디바이스를 더 포함하고,
상기 동기화 소스(109)는, 상기 복수 개의 수신 디바이스의 동작을 동기화하기 위해 상기 추가적인 동기 신호를 생성하고, 상기 추가적인 동기 신호를 상기 통신 네트워크(107)를 거쳐 상기 복수 개의 수신 디바이스로 제공하도록 구성되며,
상기 처리 디바이스(111)는, 상기 복수 개의 수신 디바이스로부터 상기 복수 개의 수신 신호를 수신하고, 상기 복수 개의 수신 신호에 기초하여 상기 해양 환경에 있는 추가적인 오브젝트의 위치를 결정하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 11 항에 있어서,
상기 복수 개의 수신 디바이스 중 제 1 수신 디바이스는 제 1 수신 신호를 제공하도록 구성되고, 상기 복수 개의 수신 디바이스 중 제 2 수신 디바이스는 제 2 수신 신호를 제공하도록 구성되며, 상기 처리 디바이스(111)는, 상기 제 1 수신 디바이스에 의한 전자기 신호의 수신과 상기 제 2 수신 디바이스에 의한 전자기 신호의 수신 사이의 시간차를 상기 제 1 수신 신호 및 제 2 수신 신호에 기초하여 결정하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 12 항 중 어느 한 항에 있어서,
상기 시스템은,
상기 해양 환경에 있는 오브젝트(301)의 검출을 수행하고, 상기 해양 환경에 있는 오브젝트(301)의 위치에 관련된 추가적인 센서 신호를 상기 통신 네트워크(107)를 거쳐 송신하도록 구성되는 추가적인 무선 검출 및 거리측정 디바이스를 더 포함하고,
상기 처리 디바이스(111)는 상기 추가적인 무선 검출 및 거리측정 디바이스로부터 상기 추가적인 센서 신호를 수신하고, 상기 해양 환경에 있는 오브젝트(301)의 위치를 상기 추가적인 센서 신호에 기초하여 결정하도록 구성되는, 해양 환경 모니터링 시스템(100). - 제 1 항 내지 제 13 항 중 어느 한 항에 있어서,
상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)는 감시 무선 검출 및 거리측정 디바이스(401 내지 411) 및 해상 추락자(man-over-board) 무선 검출 및 거리측정 디바이스(413 내지 427)를 포함하는, 해양 환경 모니터링 시스템(100). - 해양 환경을 모니터링하는 방법(200)으로서,
동기화 소스(109)에 의해 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)의 동작을 동기화하기 위한 동기 신호를 생성하는 단계(201);
상기 동기화 소스(109)에 의해 상기 동기 신호를 통신 네트워크(107)를 거쳐 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)로 제공하는 단계(203);
상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)에 의해 상기 동기 신호를 수신하는 단계(205);
상기 동기 신호에 따라서 각각의 무선 검출 및 거리측정 디바이스(101, 103, 105)의 동작을 동기화하는 단계(207);
상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)에 의해 상기 해양 환경에 있는 오브젝트(301)의 동기적 검출을 수행하는 단계(209);
상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)에 의해 통신 네트워크(107)를 거쳐 상기 해양 환경에 있는 오브젝트(301)의 위치에 각각 관련된 복수 개의 센서 신호를 송신하는 단계(211);
처리 디바이스(111)에 의해 상기 복수 개의 무선 검출 및 거리측정 디바이스(101, 103, 105)로부터 상기 복수 개의 센서 신호를 수신하는 단계(213); 및
상기 처리 디바이스(111)에 의해 상기 복수 개의 센서 신호에 기초하여 상기 해양 환경에 있는 오브젝트(301)의 위치를 결정하는 단계(215)를 포함하는, 해양 환경 모니터링 방법(200). - 컴퓨터에서 실행되면 제 15 항의 방법(200)을 수행하기 위한 프로그램 코드를 포함하는 컴퓨터 프로그램.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14194865.3 | 2014-11-26 | ||
| EP14194865.3A EP3026458B1 (en) | 2014-11-26 | 2014-11-26 | A system for monitoring a maritime environment |
| PCT/EP2015/077744 WO2016083492A2 (en) | 2014-11-26 | 2015-11-26 | A system for monitoring a maritime environment |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170065653A true KR20170065653A (ko) | 2017-06-13 |
| KR102090087B1 KR102090087B1 (ko) | 2020-03-18 |
Family
ID=51982449
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177012471A Active KR102090087B1 (ko) | 2014-11-26 | 2015-11-26 | 해양 환경 모니터링 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10769239B2 (ko) |
| EP (2) | EP3026458B1 (ko) |
| JP (1) | JP6532540B2 (ko) |
| KR (1) | KR102090087B1 (ko) |
| DK (1) | DK3224648T3 (ko) |
| WO (1) | WO2016083492A2 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102156936B1 (ko) | 2019-09-09 | 2020-09-16 | 주식회사 에드오션 | 해양 환경 모니터링을 위한 이미지 분석 기반 수면 관측 시스템 및 방법 |
| KR20220051529A (ko) | 2020-10-19 | 2022-04-26 | 동명대학교산학협력단 | 수중드론과 소나를 이용한 해양 모니터링 시스템 |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9778657B2 (en) | 2010-11-19 | 2017-10-03 | Bradley Tyers | Automatic location placement system |
| FR3018941B1 (fr) * | 2014-03-21 | 2017-07-07 | Thales Sa | Pilotage de vehicules en convoi |
| KR102401176B1 (ko) * | 2017-09-14 | 2022-05-24 | 삼성전자주식회사 | 레이더 영상 처리 방법, 장치 및 시스템 |
| CN108051816B (zh) * | 2017-12-20 | 2021-10-12 | 雷象科技(北京)有限公司 | 阵列天气雷达协同扫描系统及方法 |
| FR3082666B1 (fr) * | 2018-06-19 | 2021-05-21 | Thales Sa | Procede de mesure de la hauteur de vagues a l'aide d'un radar aeroporte |
| US11416077B2 (en) * | 2018-07-19 | 2022-08-16 | Infineon Technologies Ag | Gesture detection system and method using a radar sensor |
| EP3671682A1 (en) * | 2018-12-17 | 2020-06-24 | SOS Ltd. | Man over board detection system |
| US11002848B2 (en) * | 2019-05-15 | 2021-05-11 | The United States Of America As Represented By The Secretary Of The Army | Interferometric synthetic aperture radar imaging of subsurface structures |
| RU2717970C1 (ru) * | 2019-10-07 | 2020-03-27 | Федеральное государственное унитарное предприятие "Ростовский-на-Дону научно-исследовательский институт радиосвязи" (ФГУП "РНИИРС") | Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов |
| CN110865333B (zh) * | 2019-11-19 | 2021-08-24 | 浙江大学 | 洋流影响下水下滑翔机单信标无源声学定位方法 |
| US11395149B2 (en) | 2020-05-01 | 2022-07-19 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12256225B2 (en) | 2020-05-01 | 2025-03-18 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12212974B2 (en) | 2020-05-01 | 2025-01-28 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12177679B2 (en) | 2020-05-01 | 2024-12-24 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US11665547B2 (en) | 2020-05-01 | 2023-05-30 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12413984B2 (en) | 2020-05-01 | 2025-09-09 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US11700533B2 (en) | 2020-05-01 | 2023-07-11 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12309599B2 (en) | 2020-05-01 | 2025-05-20 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US11653213B2 (en) | 2020-05-01 | 2023-05-16 | Digital Global Systems. Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12133082B2 (en) | 2020-05-01 | 2024-10-29 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12262213B2 (en) | 2020-05-01 | 2025-03-25 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12192777B2 (en) | 2020-05-01 | 2025-01-07 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12219365B2 (en) | 2020-05-01 | 2025-02-04 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US11849332B2 (en) | 2020-05-01 | 2023-12-19 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12323812B2 (en) | 2020-05-01 | 2025-06-03 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12294866B2 (en) | 2020-05-01 | 2025-05-06 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12262211B2 (en) | 2020-05-01 | 2025-03-25 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US11638160B2 (en) | 2020-05-01 | 2023-04-25 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12513528B2 (en) | 2020-05-01 | 2025-12-30 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| US12096230B2 (en) | 2020-05-01 | 2024-09-17 | Digital Global Systems, Inc. | System, method, and apparatus for providing dynamic, prioritized spectrum management and utilization |
| CN111624599B (zh) * | 2020-05-27 | 2022-12-13 | 哈尔滨工程大学 | 一种航海雷达反演海浪有效波高计算方法 |
| WO2022080014A1 (ja) * | 2020-10-13 | 2022-04-21 | ソニーセミコンダクタソリューションズ株式会社 | センサ制御システム及びセンサ |
| CN116635738A (zh) | 2020-12-23 | 2023-08-22 | 古野电气株式会社 | 物标检测装置及物标检测方法 |
| GB202101727D0 (en) * | 2021-02-08 | 2021-03-24 | Offshore Survival Systems Ltd | Location apparatus |
| JP7750661B2 (ja) * | 2021-03-09 | 2025-10-07 | パイオニア株式会社 | 情報処理装置、制御方法、プログラム及び記憶媒体 |
| JP7739016B2 (ja) * | 2021-03-12 | 2025-09-16 | パイオニア株式会社 | 情報処理装置、制御方法、プログラム及び記憶媒体 |
| US11432249B1 (en) * | 2021-06-16 | 2022-08-30 | Apple Inc. | Electronic devices with time domain radio-frequency exposure averaging |
| CN113296089B (zh) * | 2021-07-27 | 2021-11-19 | 中国人民解放军空军预警学院 | 用于多预警机目标跟踪系统的lmb密度融合方法及装置 |
| US12038500B2 (en) | 2021-08-25 | 2024-07-16 | Rockwell Collins, Inc. | Airborne sensor to sensor information sharing technique |
| US12294876B2 (en) | 2021-12-10 | 2025-05-06 | T-Mobile Usa, Inc. | Location simulation for wireless devices |
| KR20240058035A (ko) * | 2022-10-25 | 2024-05-03 | 나부테스코 가부시키가이샤 | 선박 감시 시스템, 선박 감시 시스템의 제어 방법, 선박 감시 시스템의 제어 프로그램을 기억하는 기억 매체 |
| DE102023200298A1 (de) * | 2023-01-16 | 2024-07-18 | Zf Friedrichshafen Ag | Zentraleinheit für ein Sensornetzwerk |
| US20250004093A1 (en) * | 2023-06-29 | 2025-01-02 | Qualcomm Incorporated | Sea state information based on radio frequency for sensing procedure |
| CN120176799B (zh) * | 2025-03-06 | 2025-10-03 | 中国水利水电科学研究院 | 一种基于多天线逆向建模的水位测量方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080165046A1 (en) * | 1999-06-14 | 2008-07-10 | Time Domain Corporation | System and method for intrusion detection using a time domain radar array |
| KR20100045987A (ko) * | 2007-08-03 | 2010-05-04 | 탈레스 | 모듈 방식 레이더 아키텍쳐 |
| CN101738600A (zh) * | 2008-11-14 | 2010-06-16 | 武汉大学 | 高频地波雷达组网的时钟同步控制方法及其装置 |
| WO2010067057A2 (en) * | 2008-12-10 | 2010-06-17 | Qinetiq Limited | Method for mitigating the effects of clutter and interference on a radar system |
Family Cites Families (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19739435A1 (de) | 1997-09-09 | 1999-03-11 | Bosch Gmbh Robert | Meßfühler |
| JP3460586B2 (ja) | 1998-07-09 | 2003-10-27 | 三菱電機株式会社 | 気象レーダネットワークシステム |
| JP2000065923A (ja) | 1998-08-20 | 2000-03-03 | Mitsubishi Electric Corp | レーダ装置及びその制御方法 |
| JP3469151B2 (ja) | 1999-12-17 | 2003-11-25 | 三菱電機株式会社 | 複数レーダ連携システムの運用方法 |
| JP3555758B2 (ja) | 2001-03-06 | 2004-08-18 | 日本電気株式会社 | センサー統制による同期式追尾方法及び装置 |
| JP3642287B2 (ja) * | 2001-03-16 | 2005-04-27 | 三菱電機株式会社 | レーダシステム及びレーダ装置 |
| GB2393871B (en) * | 2001-07-26 | 2005-02-09 | Codar Ocean Sensors Ltd | Multi-station HF FMCW radar frequency sharing with GPS time modulation multiplexing |
| US20030071751A1 (en) | 2001-07-26 | 2003-04-17 | Barrick Donald E. | Ocean surface current mapping with bistatic HF radar |
| DE10149115A1 (de) * | 2001-10-05 | 2003-04-17 | Bosch Gmbh Robert | Objekterfassungsvorrichtung |
| JP3608198B2 (ja) | 2001-10-29 | 2005-01-05 | 三菱電機株式会社 | 海域探査レーダ |
| JP3557462B2 (ja) | 2001-11-21 | 2004-08-25 | 独立行政法人情報通信研究機構 | オフライン・バイスタティック・ドップラーレーダシステム |
| JP2003185742A (ja) | 2001-12-20 | 2003-07-03 | Mitsubishi Electric Corp | 海域探査レーダ装置 |
| JP2003194933A (ja) | 2001-12-21 | 2003-07-09 | Mitsubishi Electric Corp | 気象システムの診断装置 |
| JP2005291806A (ja) | 2004-03-31 | 2005-10-20 | Mitsubishi Electric Corp | レーダ装置 |
| US7151483B2 (en) * | 2004-05-03 | 2006-12-19 | Raytheon Company | System and method for concurrent operation of multiple radar or active sonar systems on a common frequency |
| JP5002888B2 (ja) | 2004-10-08 | 2012-08-15 | 日本電気株式会社 | マルチレーダシステム及びその制御方法 |
| JP2008064673A (ja) | 2006-09-08 | 2008-03-21 | Mitsubishi Electric Corp | パッシブレーダ装置 |
| GB2441802A (en) * | 2006-09-13 | 2008-03-19 | Marine & Remote Sensing Soluti | Safety system for a vehicle |
| JP4925845B2 (ja) | 2007-01-30 | 2012-05-09 | 三菱電機株式会社 | マルチセンサ制御システム |
| DE102008012375A1 (de) * | 2007-03-02 | 2008-09-04 | In - Innovative Navigation Gmbh | Verfahren und Vorrichtung zur Verfolgung mindestens eines sich bewegenden Objekts |
| US7737880B2 (en) | 2008-10-22 | 2010-06-15 | Honeywell International Inc. | Microwave and millimeterwave radar sensors |
| US8259699B2 (en) * | 2009-01-09 | 2012-09-04 | Mitsubishi Electric Research Laboratories, Inc. | Method and system for target positioning and tracking in cooperative relay networks |
| JP5669168B2 (ja) | 2009-03-05 | 2015-02-12 | 日本電気株式会社 | 距離計測システム及び距離計測方法 |
| US9075145B2 (en) * | 2009-05-12 | 2015-07-07 | Raytheon Anschutz Gmbh | Combining data from multiple radar signals on a single plan position indicator (PPI) display |
| US8922421B2 (en) * | 2009-12-10 | 2014-12-30 | Lockheed Martin Corporation | Method and system for use of GPS disciplined oscillators for coherent timing reference in distributed radar systems |
| JP2011141121A (ja) | 2009-12-25 | 2011-07-21 | Shuhei Asanuma | 救難信号発振器 |
| IT1399129B1 (it) * | 2010-04-01 | 2013-04-05 | Paoletti | Sistema di sorveglianza adattivo modulare per mezzi strutture persone |
| JP2012042427A (ja) | 2010-08-23 | 2012-03-01 | Japan Radio Co Ltd | 航法補完装置およびレーダ装置 |
| JP5901896B2 (ja) | 2011-06-13 | 2016-04-13 | 古野電気株式会社 | 船舶用追尾情報管理システム及び船舶用レーダ装置 |
| GB2493390A (en) * | 2011-08-05 | 2013-02-06 | Marine & Remote Sensing Solutions Ltd | System for detecting a person overboard event |
| EP2604478B2 (de) * | 2011-12-13 | 2021-03-31 | Aptiv Technologies Limited | Verfahren zur erkennung von funktionsfehlern einer multisensoranordnung |
| IL217450A (en) | 2012-01-10 | 2017-02-28 | Israel Aerospace Ind Ltd | Anti-rocket system |
| GB2500931A (en) * | 2012-04-05 | 2013-10-09 | Selex Galileo Ltd | Radar surveillance system |
| JP5896823B2 (ja) | 2012-04-26 | 2016-03-30 | 三菱電機株式会社 | 目標追尾装置及び目標追尾方法 |
| JP5858861B2 (ja) | 2012-04-27 | 2016-02-10 | 三菱電機株式会社 | クロック番号・時刻対応付回路、指定クロック時刻生成回路、イベント実施指示・時間差分生成回路、イベント実施装置、レーダ装置及び通信装置 |
| JP5976413B2 (ja) | 2012-06-22 | 2016-08-23 | 株式会社東芝 | レーダーシステム、送信機、受信機及びレーダーシステムの送受信方法 |
| WO2014178131A1 (ja) * | 2013-05-01 | 2014-11-06 | 古河電気工業株式会社 | レーダシステム |
| EP2866052A1 (en) * | 2013-10-23 | 2015-04-29 | Ladar Limited | A system for monitoring a maritime environment |
| US9442188B2 (en) | 2014-03-14 | 2016-09-13 | Codar Ocean Sensors, Ltd. | Negative pseudo-range processing with multi-static FMCW radars |
-
2014
- 2014-11-26 EP EP14194865.3A patent/EP3026458B1/en active Active
-
2015
- 2015-11-26 JP JP2017547070A patent/JP6532540B2/ja active Active
- 2015-11-26 WO PCT/EP2015/077744 patent/WO2016083492A2/en not_active Ceased
- 2015-11-26 DK DK15804358.8T patent/DK3224648T3/da active
- 2015-11-26 EP EP15804358.8A patent/EP3224648B1/en active Active
- 2015-11-26 US US15/531,108 patent/US10769239B2/en active Active
- 2015-11-26 KR KR1020177012471A patent/KR102090087B1/ko active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080165046A1 (en) * | 1999-06-14 | 2008-07-10 | Time Domain Corporation | System and method for intrusion detection using a time domain radar array |
| KR20100045987A (ko) * | 2007-08-03 | 2010-05-04 | 탈레스 | 모듈 방식 레이더 아키텍쳐 |
| CN101738600A (zh) * | 2008-11-14 | 2010-06-16 | 武汉大学 | 高频地波雷达组网的时钟同步控制方法及其装置 |
| WO2010067057A2 (en) * | 2008-12-10 | 2010-06-17 | Qinetiq Limited | Method for mitigating the effects of clutter and interference on a radar system |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102156936B1 (ko) | 2019-09-09 | 2020-09-16 | 주식회사 에드오션 | 해양 환경 모니터링을 위한 이미지 분석 기반 수면 관측 시스템 및 방법 |
| KR20220051529A (ko) | 2020-10-19 | 2022-04-26 | 동명대학교산학협력단 | 수중드론과 소나를 이용한 해양 모니터링 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3224648B1 (en) | 2020-11-11 |
| WO2016083492A2 (en) | 2016-06-02 |
| EP3026458B1 (en) | 2021-09-01 |
| DK3224648T3 (da) | 2021-02-01 |
| EP3224648A2 (en) | 2017-10-04 |
| KR102090087B1 (ko) | 2020-03-18 |
| US20180336308A1 (en) | 2018-11-22 |
| JP2018503833A (ja) | 2018-02-08 |
| US10769239B2 (en) | 2020-09-08 |
| EP3026458A1 (en) | 2016-06-01 |
| JP6532540B2 (ja) | 2019-06-19 |
| WO2016083492A3 (en) | 2016-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102090087B1 (ko) | 해양 환경 모니터링 시스템 | |
| EP3983822B1 (en) | Multistatic radar system and method of operation thereof for detecting and tracking moving targets, in particular unmanned aerial vehicles | |
| US6665631B2 (en) | System and method for measuring short distances | |
| EP3186656B1 (en) | Radar system and associated apparatus and methods | |
| US12007492B2 (en) | Apparatus, method and computer program for processing a voice radio signal | |
| EP1735638B1 (en) | Method and system for determining the position of marine vessels and similar objects | |
| US20100256841A1 (en) | System and Method for Assisting in the Decking of an Aircraft | |
| US20170285158A1 (en) | Radar system and associated apparatus and methods | |
| EP3834007B1 (en) | Over the horizon radar (oth) system and method | |
| Yang et al. | Maritime moving object localization and detection using global navigation smart radar system | |
| Bajuri et al. | Recent advancement of radar and radionavigation in aerospace | |
| US20240319356A1 (en) | Object Detection Systems and Methods | |
| Braca et al. | Particle filtering approach to multistatic underwater sensor networks with left-right ambiguity | |
| Ponsford et al. | Surveillance of the 200 nautical mile EEZ using HFSWR in association with a spaced-based AIS interceptor | |
| Battistello et al. | Multi-sensor maritime monitoring for the Canadian Arctic: Case studies | |
| Teng | Fundamental aspects of netted radar performance | |
| Battistello et al. | Enhanced maritime traffic picture for the Canadian Arctic | |
| Mnisi et al. | A Study of AIS Frames Sent by CubeSats into the Ground Station | |
| Steinbrecher | System and Method for Measuring Short Distances |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |