KR20170077317A - Aeb 시스템을 제어하기 위한 장치 및 그 방법 - Google Patents
Aeb 시스템을 제어하기 위한 장치 및 그 방법 Download PDFInfo
- Publication number
- KR20170077317A KR20170077317A KR1020150187068A KR20150187068A KR20170077317A KR 20170077317 A KR20170077317 A KR 20170077317A KR 1020150187068 A KR1020150187068 A KR 1020150187068A KR 20150187068 A KR20150187068 A KR 20150187068A KR 20170077317 A KR20170077317 A KR 20170077317A
- Authority
- KR
- South Korea
- Prior art keywords
- mode
- aeb
- attribute information
- road
- moving object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2210/00—Detection or estimation of road or environment conditions; Detection or estimation of road shapes
-
- B60W2550/10—
-
- B60W2550/12—
-
- B60W2550/22—
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
도 2는 본 발명의 일 실시예에 따른 다양한 형태의 표지판을 보여주는 도면이다.
도 3은 본 발명의 일 실시예에 따른 다양한 형태의 도로를 보여주는 도면이다.
도 4a 내지 도 4b는 본 발명의 일 실시예에 따른 신뢰도를 산출하는 원리를 설명하기 위한 도면이다.
도 5는 본 발명의 일 실시예에 따른 AEB 시스템을 제어하기 위한 방법을 나타내는 제1 도면이다.
도 6은 본 발명의 일 실시예에 따른 AEB 시스템을 제어하기 위한 방법을 나타내는 제2 도면이다.
도 7은 본 발명의 일 실시예에 따른 센서값의 유효성 검사 방법을 나타내는 도면이다.
도 8은 본 발명의 다른 실시예에 따른 센서값의 유효성 검사 방법을 나타내는 도면이다.
도 9는 본 발명의 일 실시예에 따라 AEB 시스템의 모드 결정원리를 설명하기 위한 도면이다.
도 10은 본 발명의 다른 실시예에 따라 AEB 시스템의 모드 결정원리를 설명하기 위한 도면이다.

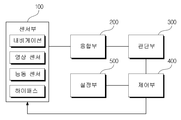
110: 영상 센서부
120: 거리 센서부
130: 능동 센서부
140: 내비게이션 기기
150: 하이패스 기기
200: 융합부
300: 판단부
400: 제어부
500: 설정부
Claims (26)
- 이동체의 위치에 따른 속성 정보에 따라 AEB(Autonomous Emergency Braking)의 모드를 활성화 모드 또는 비활성화 모드로 결정하고, 상기 결정된 모드에 따라 상기 AEB의 활성화 또는 비활성화를 제어하는 제어부; 및
상기 결정된 모드에 따라 상기 AEB의 모드를 상기 AEB를 활성화하기 위한 활성화 모드 또는 상기 AEB를 비활성화하기 위한 비활성화 모드로 변경 저장하는 설정부;
를 포함하는 AEB 시스템을 제어하기 위한 장치. - 제1 항에 있어서,
상기 제어부는,
상기 이동체의 위치에 따른 도로 속성 정보에 따라 상기 AEB의 모드를 상기 활성화 모드 또는 상기 비활성화 모드로 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제2 항에 있어서,
상기 도로 속정 정보는, 차량의 주행 또는 보행자의 보행에 영향을 미칠 수 있는 도로의 용도나 형태에 관련된 정보를 포함하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제1 항에 있어서,
상기 제어부는,
상기 이동체의 위치에 따른 환경 속성 정보를 이용하여 상기 AEB의 모드를 상기 활성화 모드 또는 상기 비활성화 모드로 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제4 항에 있어서,
상기 환경 속성 정보는, 차량의 주행 또는 보행자의 보행에 영향을 미칠 수 있는 도로 주변의 날씨나 환경에 관련된 정보를 포함하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제1 항에 있어서,
상기 제어부는,
상기 이동체의 위치에 따른 도로 속성 정보와 환경 속성 정보를 이용하여 상기 AEB의 모드를 상기 활성화 모드 또는 상기 비활성화 모드로 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제6 항에 있어서,
상기 도로 속성 정보와 상기 환경 속성 정보를 이용하여 보행자 출현 가능성을 판단하는 판단부;
를 더 포함하고,
상기 제어부는 그 판단한 결과에 따라 상기 AEB의 모드를 상기 활성화 모드 또는 상기 비활성화 모드로 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제7 항에 있어서,
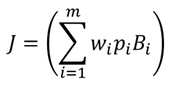
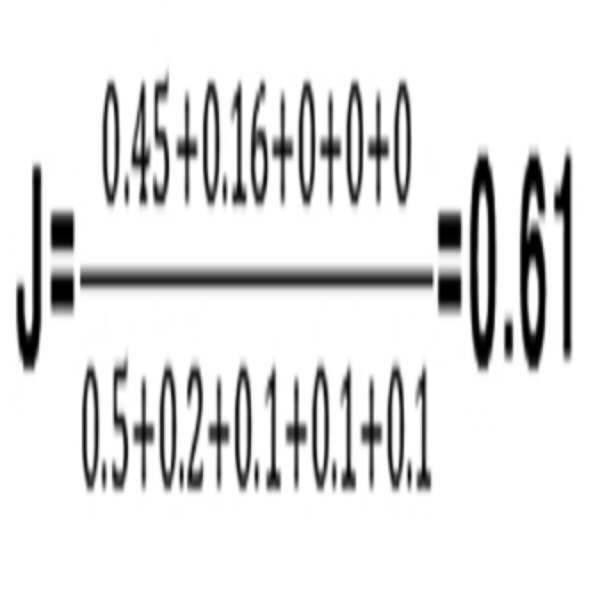
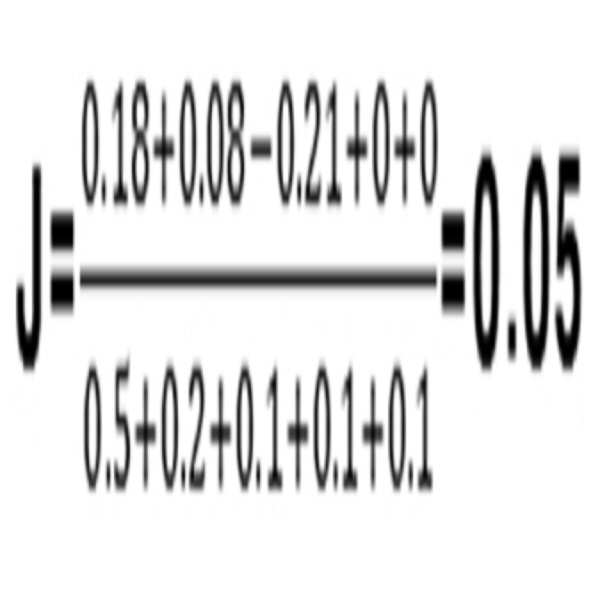
상기 도로 속성 정보와 상기 환경 속성 정보마다 기 할당된 가중치를 기반으로 상기 도로 속성 정보와 상기 환경 속성 정보를 결합하여 융합 정보를 생성하는 융합부;
를 더 포함하고,
상기 판단부는 그 결합한 결과로 생성된 상기 융합 정보를 이용하여 상기 보행자 출현 가능성을 판단하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제8 항에 있어서,
상기 융합 정보는,
보행자 보행 불가능 여부를 나타내는 값, 상기 센싱값마다 정규화된 가중치, 상기 센싱값마다 정규화된 신뢰도를 포함하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제1 항에 있어서,
상기 제어부는,
상기 이동체에 장착된 적어도 하나의 센서로부터 획득된 센싱값 이용하여 상기 이동체의 위치에 따른 속성 정보를 판단하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제10 항에 있어서,
상기 센서는, 네비게이션 기기, 영상 센서, 능동 센서, 및 하이패스 기기 중 적어도 어느 하나를 포함하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제10 항에 있어서,
상기 제어부는,
상기 이동체에 장착된 적어도 하나의 센서로부터 획득된 센싱값을 입력 받으면, 보조 표지판 또는 경로 정보를 통해 획득한 구간 잔여거리를 이용하여 상기센싱값이 유효한지를 판단하여,
그 판단한 결과로 유효하면, 입력 받은 상기 센싱값을 이용하여 상기 이동체의 위치에 따른 속성 정보를 판단하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 제1 항에 있어서,
상기 제어부는,
상기 이동체의 위치에 따른 속성 정보에 따라 상기 AEB의 모드를 현재 운영중인 활성화 모드에서 비활성화 모드로 변경할지를 결정하고,
상기 이동체의 위치에 따른 속성 정보와 상기 이동체의 상태를 나타내는 상태 정보에 따라 상기 AEB의 모드를 현재 운영중인 비활성화 모드에서 활성화 모드로 변경할지를 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 장치. - 이동체의 위치에 따른 속성 정보에 따라 상기 AEB(Autonomous Emergency Braking)의 모드를 활성화 모드 또는 비활성화 모드로 결정하고, 상기 결정된 모드에 따라 상기 AEB의 활성화 또는 비활성화를 제어하는 단계; 및
상기 결정된 모드에 따라 상기 AEB의 모드를 상기 AEB를 활성화하기 위한 활성화 모드 또는 상기 AEB를 비활성화하기 위한 비활성화 모드로 변경 저장하는 하는 단계;
를 포함하는 AEB 시스템을 제어하기 위한 방법. - 제14 항에 있어서,
상기 제어하는 단계는,
상기 이동체의 위치에 따른 도로 속성 정보에 따라 상기 AEB의 모드를 상기 활성화 모드 또는 상기 비활성화 모드로 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제15 항에 있어서,
상기 도로 속정 정보는, 차량의 주행 또는 보행자의 보행에 영향을 미칠 수 있는 도로의 용도나 형태에 관련된 정보를 포함하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제14 항에 있어서,
상기 제어하는 단계는,
상기 이동체의 위치에 따른 환경 속성 정보를 이용하여 상기 AEB의 모드를 상기 활성화 모드 또는 상기 비활성화 모드로 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제17 항에 있어서,
상기 환경 속성 정보는, 차량의 주행 또는 보행자의 보행에 영향을 미칠 수 있는 도로 주변의 날씨나 환경에 관련된 정보를 포함하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제14 항에 있어서,
상기 제어하는 단계는,
상기 이동체의 위치에 따른 도로 속성 정보와 환경 속성 정보를 이용하여 상기 AEB의 모드를 상기 활성화 모드 또는 상기 비활성화 모드로 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제19 항에 있어서,
상기 제어하는 단계는,
상기 도로 속성 정보와 상기 환경 속성 정보를 이용하여 보행자 출현 가능성을 판단하고,
그 판단한 결과에 따라 상기 AEB의 모드를 상기 활성화 모드 또는 상기 비활성화 모드로 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제20 항에 있어서,
상기 제어하는 단계는,
상기 도로 속성 정보와 상기 환경 속성 정보마다 기 할당된 가중치를 기반으로 상기 도로 속성 정보와 상기 환경 속성 정보를 결합하여 융합 정보를 생성하고,
그 결합한 결과로 생성된 융합 정보를 이용하여 상기 보행자 출현 가능성을 판단하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제21 항에 있어서,
상기 융합 정보는,
보행자 보행 불가능 여부를 나타내는 값, 상기 센싱값마다 정규화된 가중치, 상기 센싱값마다 정규화된 신뢰도를 포함하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제14 항에 있어서,
상기 제어하는 단계는,
상기 이동체에 장착된 적어도 하나의 센서로부터 획득된 센싱값 이용하여 상기 이동체의 위치에 따른 속성 정보를 판단하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제23 항에 있어서,
상기 센서는, 네비게이션 기기, 영상 센서, 능동 센서, 및 하이패스 기기 중 적어도 어느 하나를 포함하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제23 항에 있어서,
상기 제어하는 단계는,
상기 이동체에 장착된 적어도 하나의 센서로부터 획득된 센싱값을 입력 받으면, 보조 표지판 또는 경로 정보를 통해 획득한 구간 잔여거리를 이용하여 상기 센싱값이 유효한지를 판단하여,
그 판단한 결과로 유효하면, 입력 받은 상기 센싱값을 이용하여 상기 이동체의 위치에 따른 속성 정보를 판단하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법. - 제14 항에 있어서,
상기 제어하는 단계는,
상기 이동체의 위치에 따른 속성 정보에 따라 상기 AEB의 모드를 현재 운영중인 활성화 모드에서 비활성화 모드로 변경할지를 결정하고,
상기 이동체의 위치에 따른 속성 정보와 상기 이동체의 상태를 나타내는 상태 정보에 따라 상기 AEB의 모드를 현재 운영중인 비활성화 모드에서 활성화 모드로 변경할지를 결정하는 것을 특징으로 하는 AEB 시스템을 제어하기 위한 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150187068A KR101875922B1 (ko) | 2015-12-28 | 2015-12-28 | Aeb 시스템을 제어하기 위한 장치 및 그 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150187068A KR101875922B1 (ko) | 2015-12-28 | 2015-12-28 | Aeb 시스템을 제어하기 위한 장치 및 그 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170077317A true KR20170077317A (ko) | 2017-07-06 |
| KR101875922B1 KR101875922B1 (ko) | 2018-08-02 |
Family
ID=59354072
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150187068A Active KR101875922B1 (ko) | 2015-12-28 | 2015-12-28 | Aeb 시스템을 제어하기 위한 장치 및 그 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101875922B1 (ko) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190012607A (ko) * | 2017-07-28 | 2019-02-11 | 현대모비스 주식회사 | 차량의 후방 충돌 경고장치 및 그 제어방법 |
| KR20190055645A (ko) * | 2017-11-15 | 2019-05-23 | 주식회사 만도 | 조향 제어 장치 및 방법 |
| KR102061750B1 (ko) * | 2019-05-15 | 2020-01-03 | 주식회사 라이드플럭스 | 사전 정보를 이용하여 차량의 주행을 제어하는 방법 및 장치 |
| CN110816523A (zh) * | 2018-08-10 | 2020-02-21 | 现代自动车株式会社 | 车辆及其控制方法 |
| KR20200034118A (ko) * | 2018-09-21 | 2020-03-31 | 한국전자통신연구원 | 센서 융합 기반 물체 검출장치 및 검출방법 |
| KR20200132652A (ko) * | 2019-05-15 | 2020-11-25 | 주식회사 라이드플럭스 | 사전 정보를 이용하여 차량의 주행을 제어하는 방법 및 장치 |
| US11208085B2 (en) * | 2018-02-09 | 2021-12-28 | Mando Corporation | Automotive braking control system, apparatus, and method considering weather condition |
| US11364883B2 (en) * | 2020-03-27 | 2022-06-21 | Nvidia Corporation | Leveraging rear-view sensors for automatic emergency braking in autonomous machine applications |
| US11679745B2 (en) | 2018-10-08 | 2023-06-20 | Hl Klemove Corp. | Rear-end collision avoidance apparatus and method, and vehicle control apparatus including same |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6862537B2 (en) | 2002-03-21 | 2005-03-01 | Ford Global Technologies Llc | Sensor fusion system architecture |
| JP2008143387A (ja) * | 2006-12-11 | 2008-06-26 | Fujitsu Ten Ltd | 周辺監視装置および周辺監視方法 |
| JP2010066815A (ja) * | 2008-09-08 | 2010-03-25 | Denso Corp | 人物検出装置、人物検出プログラム、作動制御装置、および衝突緩和装置 |
| JP2011246103A (ja) * | 2011-02-15 | 2011-12-08 | Mitsubishi Electric Corp | 車外への音発生装置 |
| KR20120140062A (ko) | 2011-06-20 | 2012-12-28 | 현대모비스 주식회사 | 선진 안전 차량에서 스쿨 존 안전 장치 및 그 방법 |
| JP2014003387A (ja) * | 2012-06-15 | 2014-01-09 | Brother Ind Ltd | 画像読取装置及び画像形成装置 |
-
2015
- 2015-12-28 KR KR1020150187068A patent/KR101875922B1/ko active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6862537B2 (en) | 2002-03-21 | 2005-03-01 | Ford Global Technologies Llc | Sensor fusion system architecture |
| JP2008143387A (ja) * | 2006-12-11 | 2008-06-26 | Fujitsu Ten Ltd | 周辺監視装置および周辺監視方法 |
| JP2010066815A (ja) * | 2008-09-08 | 2010-03-25 | Denso Corp | 人物検出装置、人物検出プログラム、作動制御装置、および衝突緩和装置 |
| JP2011246103A (ja) * | 2011-02-15 | 2011-12-08 | Mitsubishi Electric Corp | 車外への音発生装置 |
| KR20120140062A (ko) | 2011-06-20 | 2012-12-28 | 현대모비스 주식회사 | 선진 안전 차량에서 스쿨 존 안전 장치 및 그 방법 |
| JP2014003387A (ja) * | 2012-06-15 | 2014-01-09 | Brother Ind Ltd | 画像読取装置及び画像形成装置 |
Non-Patent Citations (1)
| Title |
|---|
| 일본 공개특허공보 특개2011-246103호(2011.12.08.) 1부. * |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190012607A (ko) * | 2017-07-28 | 2019-02-11 | 현대모비스 주식회사 | 차량의 후방 충돌 경고장치 및 그 제어방법 |
| KR20210080329A (ko) * | 2017-07-28 | 2021-06-30 | 현대모비스 주식회사 | 차량의 후방 충돌 경고장치 및 그 제어방법 |
| KR20190055645A (ko) * | 2017-11-15 | 2019-05-23 | 주식회사 만도 | 조향 제어 장치 및 방법 |
| US11208085B2 (en) * | 2018-02-09 | 2021-12-28 | Mando Corporation | Automotive braking control system, apparatus, and method considering weather condition |
| CN110816523A (zh) * | 2018-08-10 | 2020-02-21 | 现代自动车株式会社 | 车辆及其控制方法 |
| KR20200034118A (ko) * | 2018-09-21 | 2020-03-31 | 한국전자통신연구원 | 센서 융합 기반 물체 검출장치 및 검출방법 |
| US11679745B2 (en) | 2018-10-08 | 2023-06-20 | Hl Klemove Corp. | Rear-end collision avoidance apparatus and method, and vehicle control apparatus including same |
| KR102061750B1 (ko) * | 2019-05-15 | 2020-01-03 | 주식회사 라이드플럭스 | 사전 정보를 이용하여 차량의 주행을 제어하는 방법 및 장치 |
| KR20200132652A (ko) * | 2019-05-15 | 2020-11-25 | 주식회사 라이드플럭스 | 사전 정보를 이용하여 차량의 주행을 제어하는 방법 및 장치 |
| US11958504B2 (en) | 2019-05-15 | 2024-04-16 | Rideflux Inc. | Method and apparatus for controlling a vehicle's driving operation using advance information |
| US11364883B2 (en) * | 2020-03-27 | 2022-06-21 | Nvidia Corporation | Leveraging rear-view sensors for automatic emergency braking in autonomous machine applications |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101875922B1 (ko) | 2018-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101875922B1 (ko) | Aeb 시스템을 제어하기 위한 장치 및 그 방법 | |
| US11972615B2 (en) | Vehicular control system | |
| KR101628503B1 (ko) | 운전자 보조장치 및 그 작동 방법 | |
| JP4309843B2 (ja) | 車両の衝突を阻止する方法および装置 | |
| KR20170040604A (ko) | 네비게이션 정보를 이용한 충돌 회피 장치 및 방법 | |
| US20200391731A1 (en) | Advanced driver assistance system, vehicle having the same, and method of controlling the vehicle | |
| KR102157582B1 (ko) | 라이다 센서 기반의 보행자 안전관리 시스템 | |
| CN114056325B (zh) | 降低碰撞风险的装置及方法 | |
| CN110116726B (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| JP5371273B2 (ja) | 物体検知装置、周辺監視装置、運転支援システムおよび物体検知方法 | |
| KR102020340B1 (ko) | 라이다를 이용한 교차로 운행 및 보행 안전 모니터링 시스템 | |
| CN112758013B (zh) | 车辆的显示装置和显示方法 | |
| KR102940026B1 (ko) | 자율주행차량의 작동 방법 | |
| US20170309179A1 (en) | Collision Avoidance System and Collision Avoidance Method | |
| KR102752639B1 (ko) | 운전자 보조 장치, 그를 가지는 차량 및 그 제어 방법 | |
| KR101917827B1 (ko) | 난폭 운전 탐지 장치 | |
| KR101428339B1 (ko) | 주정차 차량의 전면 보행자 감지 경보 시스템 및 그 방법 | |
| US10747230B2 (en) | Vehicle control apparatus, vehicle control system, and image sensor | |
| KR20170087368A (ko) | 사각지대 감지장치 및 방법 | |
| US12496968B2 (en) | Device and method for vehicle collision cautionary information using road reflector | |
| KR102884806B1 (ko) | 터닝 보조 시스템의 작동 방법, 터닝 보조 시스템, 및 이러한 터닝 보조 시스템을 구비한 자동차 | |
| KR102568294B1 (ko) | 자율주행 차량의 긴급 경로 생성 시스템 | |
| JP2019172168A (ja) | 自動運転システムおよび自動運転プログラム | |
| KR20230089780A (ko) | 충돌 방지 방법 및 장치 | |
| JPH0757181A (ja) | 車両の安全装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20151228 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20161202 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20151228 Comment text: Patent Application |
|
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20171212 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20180627 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20180702 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20180703 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20210701 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20220622 Start annual number: 5 End annual number: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20230621 Start annual number: 6 End annual number: 6 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240625 Start annual number: 7 End annual number: 7 |
|
| PR1001 | Payment of annual fee |
Payment date: 20250626 Start annual number: 8 End annual number: 8 |