KR20170077807A - 산업용 로봇 - Google Patents
산업용 로봇 Download PDFInfo
- Publication number
- KR20170077807A KR20170077807A KR1020160176523A KR20160176523A KR20170077807A KR 20170077807 A KR20170077807 A KR 20170077807A KR 1020160176523 A KR1020160176523 A KR 1020160176523A KR 20160176523 A KR20160176523 A KR 20160176523A KR 20170077807 A KR20170077807 A KR 20170077807A
- Authority
- KR
- South Korea
- Prior art keywords
- hand
- rotary shaft
- hollow
- hollow rotary
- air
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3202—Mechanical details, e.g. rollers or belts
-
- H01L21/67742—
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/33—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations into and out of processing chamber
- H10P72/3302—Mechanical parts of transfer devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0095—Manipulators transporting wafers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/91—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers
- B65G47/915—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers provided with drive systems with rotary movements only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/061—Lifting, gripping, or carrying means, for one or more sheets forming independent means of transport, e.g. suction cups, transport frames
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/063—Transporting devices for sheet glass
- B65G49/064—Transporting devices for sheet glass in a horizontal position
-
- H01L21/67712—
-
- H01L21/6773—
-
- H01L21/67766—
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3206—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations the substrate being handled substantially vertically
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/32—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations between different workstations
- H10P72/3218—Conveying cassettes, containers or carriers
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/34—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H10P72/3402—Mechanical parts of transfer devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0214—Articles of special size, shape or weigh
- B65G2201/022—Flat
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2249/00—Aspects relating to conveying systems for the manufacture of fragile sheets
- B65G2249/04—Arrangements of vacuum systems or suction cups
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Abstract
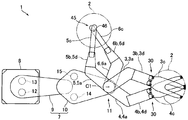
산업용 로봇(1)은, 4개의 핸드(3 내지 6)와, 핸드(3 내지 6)가 선단측에 회동 가능하게 연결되는 아암(7)을 구비하고 있고, 핸드(3 내지 6)는, 핸드(3 내지 6)의 기단측이 상하 방향으로 겹치도록 아암(7)에 연결됨과 함께, 아암(7)에 대하여 개별적으로 회동 가능하게 되어 있다. 핸드(3 내지 6) 중 가장 위에 배치되는 핸드(3) 및 위에서부터 두번째에 배치되는 핸드(4)의, 반송 대상물(2)을 유지하는 유지부(30)는, 반송 대상물(2)의 단부면이 맞닿는 맞닿음면을 갖는 단부면 맞닿음 부재와, 반송 대상물(2)의 단부면이 맞닿음면에 압박되도록 반송 대상물(2)을 누르는 압박 기구를 구비하고 있다. 남은 2개의 핸드(5, 6)의, 반송 대상물(2)을 유지하는 유지부(45)는, 반송 대상물(2)을 흡인하여 유지하는 흡인 구멍(46)을 구비하고 있다.
Description
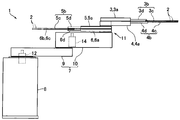
도 2는 도 1에 도시하는 산업용 로봇의 측면도이다.
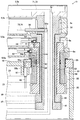
도 3은 도 2에 도시하는 산업용 로봇의 손목부의 단면도이다.
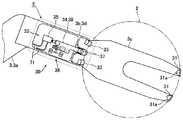
도 4는 도 1에 도시하는 제1 핸드의 선단측 부분의 구성을 설명하기 위한 평면도이다.
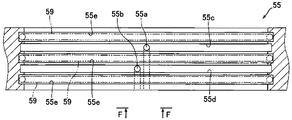
도 5는 도 4의 E부의 확대도이다.
도 6은 도 3에 도시하는 제4 중공 회동축의 일부분의 단면도이다.
도 7은 도 3에 도시하는 축 지지 부재의 단면도이다.
도 8은 도 7의 F-F 방향에서 축 지지 부재의 일부를 도시하는 도면이다.
도 9는 도 1에 도시하는 산업용 로봇의 동작을 설명하기 위한 평면도이다.
도 10은 도 1에 도시하는 산업용 로봇의 동작을 설명하기 위한 평면도이다.
2: 웨이퍼(반도체 웨이퍼, 반송 대상물)
3: 핸드(제1 핸드, 제1 핸드 쌍의 일부)
3a: 기단측 부분(제1 핸드의 기단측 부분)
3c: 탑재부
3d: 지지부
4: 핸드(제2 핸드, 제1 핸드 쌍의 일부)
4a: 기단측 부분(제2 핸드의 기단측 부분)
4c: 탑재부
4d: 지지부
5: 핸드(제3 핸드, 제2 핸드 쌍의 일부)
5a: 기단측 부분(제3 핸드의 기단측 부분)
6: 핸드(제4 핸드, 제2 핸드 쌍의 일부)
6a: 기단측 부분(제4 핸드의 기단측 부분)
7: 아암
8: 본체부
30: 유지부
31: 단부면 맞닿음 부재
31a: 맞닿음면
32: 압박 기구
34: 압박부
35: 에어 실린더
36: 검지 기구
45: 유지부
46: 흡인 구멍
51: 중공 회동축(제1 중공 회동축)
51a: 절결부
52: 중공 회동축(제2 중공 회동축)
53: 중공 회동축(제3 중공 회동축)
53a: 공기 구멍
54: 중공 회동축(제4 중공 회동축)
54a, 54d: 공기 구멍
71: 공기 배관(제1 핸드의 지지부의 내부에 배치되는 에어 실린더용 공기 배관)
72: 배선(제1 핸드의 지지부의 내부에 배치되는 검지 기구용 배선)
73: 공기 배관(제2 핸드의 지지부의 내부에 배치되는 에어 실린더용 공기 배관)
74: 배선(제2 핸드의 지지부의 내부에 배치되는 검지 기구용 배선)
Claims (4)
- 반송 대상물이 탑재되는 4개의 핸드와, 4개의 상기 핸드가 선단측에 회동 가능하게 연결되는 아암과, 상기 아암의 기단측이 회동 가능하게 연결되는 본체부를 구비하고,
4개의 상기 핸드는, 상기 반송 대상물을 유지하는 유지부를 구비하고, 4개의 상기 핸드의 기단측이 상하 방향으로 겹치도록 상기 아암에 연결됨과 함께, 상기 아암에 대하여 개별적으로 회동 가능하게 되어 있고,
4개의 상기 핸드 중 가장 위에 배치되는 상기 핸드와 위에서부터 두번째에 배치되는 상기 핸드를 제1 핸드 쌍이라 하고, 남은 2개의 상기 핸드를 제2 핸드 쌍이라 하면,
상기 제1 핸드 쌍 및 상기 제2 핸드 쌍 중 어느 한쪽을 구성하는 2개의 상기 핸드의 상기 유지부는, 상기 반송 대상물의 단부면이 맞닿는 맞닿음면을 갖는 단부면 맞닿음 부재와, 상기 반송 대상물의 단부면이 상기 맞닿음면에 압박되도록 상기 반송 대상물을 누르는 압박 기구를 구비하고,
상기 제1 핸드 쌍 및 상기 제2 핸드 쌍 중 어느 다른 쪽을 구성하는 2개의 상기 핸드의 상기 유지부는, 상기 반송 대상물을 흡인하여 유지하는 흡인 구멍을 구비하는 것을 특징으로 하는 산업용 로봇. - 제1항에 있어서, 상기 압박 기구는, 상기 맞닿음면을 향하여 상기 반송 대상물의 단부면을 누르는 압박부와, 상기 압박부를 구동하는 에어 실린더와, 상기 압박부의 움직임을 검지하는 검지 기구를 구비하는 것을 특징으로 하는 산업용 로봇.
- 제2항에 있어서, 4개의 상기 핸드 중 가장 위에 배치되는 상기 핸드를 제1 핸드라고 하고, 위에서부터 두번째에 배치되는 상기 핸드를 제2 핸드라고 하고, 위에서부터 세번째에 배치되는 상기 핸드를 제3 핸드라고 하고, 가장 밑에 배치되는 상기 핸드를 제4 핸드라고 하면,
중공형으로 형성되고 상기 제1 핸드의 기단측 부분의 하면측이 고정되는 제1 중공 회동축과, 중공형으로 형성되고 상기 제1 중공 회동축의 외주측에, 또한 상기 제1 중공 회동축과 동축 상에 배치됨과 함께 상기 제2 핸드의 기단측 부분의 하면측이 고정되는 제2 중공 회동축과, 중공형으로 형성되고 상기 제2 중공 회동축의 외주측에, 또한 상기 제1 중공 회동축과 동축 상에 배치됨과 함께 상기 제3 핸드의 기단측 부분의 하면측이 고정되는 제3 중공 회동축과, 중공형으로 형성되고 상기 제3 중공 회동축의 외주측에, 또한 상기 제1 중공 회동축과 동축 상에 배치됨과 함께 상기 제4 핸드의 기단측 부분의 하면측이 고정되는 제4 중공 회동축을 구비하고,
상기 제1 핸드 및 상기 제2 핸드의 상기 유지부는, 상기 단부면 맞닿음 부재와 상기 압박 기구를 구비하고,
상기 제3 핸드 및 상기 제4 핸드의 상기 유지부는, 상기 반송 대상물을 흡인하여 유지하는 것을 특징으로 하는 산업용 로봇. - 제3항에 있어서, 상기 제1 핸드 및 상기 제2 핸드는, 상기 반송 대상물이 탑재되는 탑재부와, 상기 탑재부를 지지하는 지지부를 구비하고,
상기 제1 핸드의 상기 지지부는, 상기 제1 핸드의 상기 탑재부와 상기 제1 핸드의 기단측 부분을 연결하고 있고,
상기 제2 핸드의 상기 지지부는, 상기 제2 핸드의 상기 탑재부와 상기 제2 핸드의 기단측 부분을 연결하고 있고,
상기 제1 핸드의 기단측 부분 및 상기 지지부와, 상기 제2 핸드의 기단측 부분 및 상기 지지부와, 상기 제3 핸드와, 상기 제4 핸드는, 중공형으로 되어 있고,
상기 제1 핸드의 상기 지지부의 내부 및 상기 제2 핸드의 상기 지지부의 내부에는, 상기 에어 실린더 및 상기 검지 기구가 배치되고,
상기 제1 핸드의 상기 지지부의 내부에 배치되는 상기 에어 실린더용 공기 배관 및 상기 제1 핸드의 상기 지지부의 내부에 배치되는 상기 검지 기구용 배선은, 상기 제1 중공 회동축의 내주측을 통과하여 상기 제1 핸드의 기단측 부분의 내부로 인입되고,
상기 제1 중공 회동축에는, 상기 제1 중공 회동축의 직경 방향으로 관통하도록, 또한 상기 제1 중공 회동축의 둘레 방향을 길이 방향으로 하는 슬릿형 절결부가 형성되고,
상기 절결부는, 상기 제2 중공 회동축의 상단부보다 상측에 배치되고,
상기 제2 핸드의 상기 지지부의 내부에 배치되는 상기 에어 실린더용 공기 배관 및 상기 제2 핸드의 상기 지지부의 내부에 배치되는 상기 검지 기구용 배선은, 상기 제1 중공 회동축의 내주측을 통과한 후, 상기 절결부를 통과하여 상기 제2 핸드의 기단측 부분의 내부로 인입되고,
상기 제3 중공 회동축 및 상기 제4 중공 회동축에는, 상기 제3 핸드의 내부로 통하는 공기 구멍이 형성되고,
상기 제4 중공 회동축에는, 상기 제4 핸드의 내부로 통하는 공기 구멍이 형성되어 있는 것을 특징으로 하는 산업용 로봇.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015256227A JP6649768B2 (ja) | 2015-12-28 | 2015-12-28 | 産業用ロボット |
| JPJP-P-2015-256227 | 2015-12-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170077807A true KR20170077807A (ko) | 2017-07-06 |
| KR102538850B1 KR102538850B1 (ko) | 2023-06-01 |
Family
ID=59271594
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160176523A Active KR102538850B1 (ko) | 2015-12-28 | 2016-12-22 | 산업용 로봇 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6649768B2 (ko) |
| KR (1) | KR102538850B1 (ko) |
| CN (1) | CN106920765A (ko) |
| TW (1) | TWI694906B (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230150120A1 (en) * | 2021-11-17 | 2023-05-18 | Kawasaki Jukogyo Kabushiki Kaisha | Substrate Conveying Robot and Substrate Conveying Robot System |
| CN116262354A (zh) * | 2021-12-15 | 2023-06-16 | 日本电产三协株式会社 | 工业用机器人及工业用机器人的控制方法 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110944809B (zh) * | 2017-08-02 | 2023-04-14 | 株式会社富士 | 末端执行器 |
| JP7158877B2 (ja) | 2018-03-29 | 2022-10-24 | 日本電産サンキョー株式会社 | 産業用ロボットおよび産業用ロボットの制御方法 |
| JP7313229B2 (ja) * | 2019-08-07 | 2023-07-24 | ニデックインスツルメンツ株式会社 | 処理システム |
| CN111958615A (zh) * | 2020-08-19 | 2020-11-20 | 西安奕斯伟硅片技术有限公司 | 一种用于搬送晶圆的组件及方法 |
| JP7530793B2 (ja) * | 2020-10-02 | 2024-08-08 | ニデックインスツルメンツ株式会社 | 産業用ロボット |
| JP7588999B2 (ja) | 2020-10-02 | 2024-11-25 | ニデックインスツルメンツ株式会社 | 産業用ロボットのハンド、産業用ロボット |
| JP7530792B2 (ja) * | 2020-10-02 | 2024-08-08 | ニデックインスツルメンツ株式会社 | 産業用ロボットのハンド、産業用ロボット |
| JP7543062B2 (ja) | 2020-10-02 | 2024-09-02 | ニデックインスツルメンツ株式会社 | 産業用ロボットのハンド、産業用ロボット |
| JP7562377B2 (ja) | 2020-11-09 | 2024-10-07 | ニデックインスツルメンツ株式会社 | 産業用ロボットの教示方法 |
| JP7578486B2 (ja) * | 2020-12-28 | 2024-11-06 | ニデックインスツルメンツ株式会社 | 産業用ロボット |
| JP7730710B2 (ja) * | 2021-10-04 | 2025-08-28 | ニデックインスツルメンツ株式会社 | 製造システム |
| CN116476105A (zh) * | 2023-04-28 | 2023-07-25 | 中芯智达半导体科技(上海)有限公司 | 大载荷末端执行机构及多手腕晶圆机器人 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008141158A (ja) * | 2006-11-29 | 2008-06-19 | Samsung Electronics Co Ltd | ウエハ移送装置、ウエハ移送方法及びコンピュータ可読記録媒体 |
| WO2010103876A1 (ja) * | 2009-03-13 | 2010-09-16 | 川崎重工業株式会社 | エンドエフェクタを備えたロボット及びその運転方法 |
| KR20110054051A (ko) * | 2008-10-17 | 2011-05-24 | 가부시키가이샤 알박 | 반송 장치 및 진공 장치 |
| JP2012066342A (ja) | 2010-09-24 | 2012-04-05 | Nidec Sankyo Corp | 産業用ロボット |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006278629A (ja) * | 2005-03-29 | 2006-10-12 | Lintec Corp | 搬送装置 |
| JP4970128B2 (ja) * | 2007-04-27 | 2012-07-04 | 日本電産サンキョー株式会社 | 産業用ロボット及び集合処理装置 |
| JP4959427B2 (ja) * | 2007-06-05 | 2012-06-20 | 日本電産サンキョー株式会社 | 産業用ロボット |
| KR20100052525A (ko) * | 2007-09-10 | 2010-05-19 | 가부시키가이샤 알박 | 기판 반송 로봇, 진공 처리 장치 |
| CN102326244B (zh) * | 2009-01-11 | 2014-12-17 | 应用材料公司 | 用于在电子器件制造中传输基板的机械手系统、装置及方法 |
| JP2013544034A (ja) * | 2010-11-10 | 2013-12-09 | ブルックス オートメーション インコーポレイテッド | 双腕ロボット |
| JP5614417B2 (ja) * | 2012-01-05 | 2014-10-29 | 株式会社安川電機 | 搬送システム |
| US9330951B2 (en) * | 2013-06-05 | 2016-05-03 | Persimmon Technologies, Corp. | Robot and adaptive placement system and method |
-
2015
- 2015-12-28 JP JP2015256227A patent/JP6649768B2/ja active Active
-
2016
- 2016-11-11 TW TW105136831A patent/TWI694906B/zh active
- 2016-12-14 CN CN201611166866.5A patent/CN106920765A/zh not_active Withdrawn
- 2016-12-22 KR KR1020160176523A patent/KR102538850B1/ko active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008141158A (ja) * | 2006-11-29 | 2008-06-19 | Samsung Electronics Co Ltd | ウエハ移送装置、ウエハ移送方法及びコンピュータ可読記録媒体 |
| KR20110054051A (ko) * | 2008-10-17 | 2011-05-24 | 가부시키가이샤 알박 | 반송 장치 및 진공 장치 |
| WO2010103876A1 (ja) * | 2009-03-13 | 2010-09-16 | 川崎重工業株式会社 | エンドエフェクタを備えたロボット及びその運転方法 |
| JP2012066342A (ja) | 2010-09-24 | 2012-04-05 | Nidec Sankyo Corp | 産業用ロボット |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230150120A1 (en) * | 2021-11-17 | 2023-05-18 | Kawasaki Jukogyo Kabushiki Kaisha | Substrate Conveying Robot and Substrate Conveying Robot System |
| US12162145B2 (en) * | 2021-11-17 | 2024-12-10 | Kawasaki Jukogyo Kabushiki Kaisha | Substrate conveying robot and substrate conveying robot system |
| CN116262354A (zh) * | 2021-12-15 | 2023-06-16 | 日本电产三协株式会社 | 工业用机器人及工业用机器人的控制方法 |
| KR20230091014A (ko) * | 2021-12-15 | 2023-06-22 | 니덱 인스트루먼츠 가부시키가이샤 | 산업용 로봇 및 산업용 로봇의 제어 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI694906B (zh) | 2020-06-01 |
| TW201722654A (zh) | 2017-07-01 |
| JP6649768B2 (ja) | 2020-02-19 |
| KR102538850B1 (ko) | 2023-06-01 |
| CN106920765A (zh) | 2017-07-04 |
| JP2017119326A (ja) | 2017-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170077807A (ko) | 산업용 로봇 | |
| KR101449881B1 (ko) | 산업용 로봇 | |
| KR101680993B1 (ko) | 산업용 로봇 | |
| CN101794721B (zh) | 半导体晶圆的定位装置 | |
| CN108656123B (zh) | 工业机器人 | |
| TWI383936B (zh) | 基板交換裝置、基板處理裝置及基板檢查裝置 | |
| CN107251211A (zh) | 衬底搬送机械手及其运转方法 | |
| JP7474325B2 (ja) | ウエハ搬送装置、およびウエハ搬送方法 | |
| JP4697211B2 (ja) | 基板アライメント機構を備えた搬送ロボット及びそれを備えた半導体製造装置または基板検査装置 | |
| JP2010074093A (ja) | 半導体ウエーハ搬送用ハンド | |
| KR102539039B1 (ko) | 산업용 로봇 | |
| JP2016107378A (ja) | 産業用ロボットおよび産業用ロボットの教示方法 | |
| TW201402288A (zh) | 機器人 | |
| CN115039214A (zh) | 基板搬运装置以及基板位置偏移测定方法 | |
| TWI750741B (zh) | 產業用機器人 | |
| CN103328164B (zh) | 运送装置及真空装置 | |
| JP2626582B2 (ja) | ウエハ位置の計測ユニットならびにウエハアライメントユニットおよび方法 | |
| KR20230082037A (ko) | 산업용 로봇 | |
| WO2018003578A1 (ja) | アライメント装置 | |
| CN111725117A (zh) | 基板输送装置 | |
| JP6630162B2 (ja) | 産業用ロボット | |
| JP2004241484A (ja) | 基板の搬送装置及び搬送装置の位置ずれ検出方法 | |
| JP4596144B2 (ja) | ウェーハ搬送方法及びウェーハ搬送装置 | |
| CN118769213A (zh) | 机器人 | |
| KR20230091014A (ko) | 산업용 로봇 및 산업용 로봇의 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |