KR20170077875A - 스프링 구조 일체형 토크 센서 및 그 구조물 - Google Patents
스프링 구조 일체형 토크 센서 및 그 구조물 Download PDFInfo
- Publication number
- KR20170077875A KR20170077875A KR1020150187106A KR20150187106A KR20170077875A KR 20170077875 A KR20170077875 A KR 20170077875A KR 1020150187106 A KR1020150187106 A KR 1020150187106A KR 20150187106 A KR20150187106 A KR 20150187106A KR 20170077875 A KR20170077875 A KR 20170077875A
- Authority
- KR
- South Korea
- Prior art keywords
- deformation
- plate
- torque sensor
- spring structure
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/22—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/108—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving resistance strain gauges
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Manipulator (AREA)
Abstract
Description
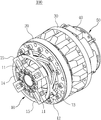
도 2는 본 발명의 일 실시예에 따른 토크 센서가 채용된 관절 구동 모듈을 나타낸 측면도이다.
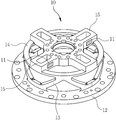
도 3은 본 발명의 일 실시예에 따른 토크 센서를 나타낸 사시도이다.
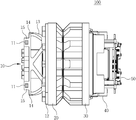
도 4는 본 발명의 일 실시예에 따른 토크 센서를 나타낸 측면도이다.
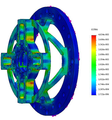
도 5는 본 발명의 일 실시예에 따른 토크 센서가 회전 방향 부하에 따라 변형되는 모습을 나타낸 도면이다.
도 6은 본 발명의 일 실시예에 따른 토크 센서에서 외력이 스프링 구조체에 의해 감쇠되는 모습을 나타낸 도면이다.
12: 고정 플레이트 13: 스프링 구조체
14: 변형 감지용 플레이트 15: 변형 빔
20: 감속기 30: 모터
40: 상대 엔코더 50: 절대 엔코더
100: 관절 구동 모듈
Claims (6)
- 고정 플레이트;
상기 고정 플레이트와 이격하여 나란히 위치하고, 토크에 따라 변형되는 변형 빔을 구비한 변형 감지용 플레이트;
상기 고정 플레이트와 상기 변형 감지용 플레이트를 사선 방향으로 연결하여, 토크를 제외한 외력이 상기 변형 빔에 전달되는 것을 방지하는 스프링 구조체; 및
상기 변형 빔에 부착되어 변형을 감지하는 스트레인 게이지;
를 포함하는 것을 특징으로 하는 스프링 구조 일체형 토크 센서. - 제1항에 있어서,
상기 스프링 구조체는,
상기 고정 플레이트로부터 상기 변형 감지용 플레이트를 사선으로 연결하는 빔과, 상기 변형 감지용 플레이트로부터 상기 고정 플레이트를 사선으로 연결하는 빔이 반복되는 지그재그 형태로 형성된 것을 특징으로 하는 스프링 구조 일체형 토크 센서. - 제1항에 있어서,
상기 변형 빔은 상기 변형 감지용 플레이트를 가로지르는 십자(+) 형태로 형성된 것을 특징으로 하는 스프링 구조 일체형 토크 센서. - 제3항에 있어서,
상기 스트레인 게이지는,
특정 변형 빔의 양면에 서로 대향하여 위치하는 복수의 게이지를 포함하고, 상기 특정 변형 빔과 회전축을 사이에 두고 마주보는 다른 변형 빔의 양면에 서로 대향하여 위치하는 복수의 게이지를 포함하는 것을 특징으로 하는 스프링 구조 일체형 토크 센서. - 고정 플레이트;
상기 고정 플레이트와 이격하여 나란히 위치하고, 토크에 따라 변형되고 스트레인 게이지가 부착되는 변형 빔을 구비한 변형 감지용 플레이트; 및
상기 고정 플레이트와 상기 변형 감지용 플레이트를 사선 방향으로 연결하여, 토크를 제외한 외력이 상기 변형 빔에 전달되는 것을 방지하는 스프링 구조체;
를 포함하는 것을 특징으로 하는 스프링 구조 일체형 토크 센서 구조물. - 제5항에 있어서,
상기 스프링 구조체는,
상기 고정 플레이트로부터 상기 변형 감지용 플레이트를 사선으로 연결하는 빔과, 상기 변형 감지용 플레이트로부터 상기 고정 플레이트를 사선으로 연결하는 빔이 반복되는 지그재그 형태로 형성된 것을 특징으로 하는 스프링 구조 일체형 토크 센서 구조물.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150187106A KR102129890B1 (ko) | 2015-12-28 | 2015-12-28 | 스프링 구조 일체형 토크 센서 및 그 구조물 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150187106A KR102129890B1 (ko) | 2015-12-28 | 2015-12-28 | 스프링 구조 일체형 토크 센서 및 그 구조물 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170077875A true KR20170077875A (ko) | 2017-07-07 |
| KR102129890B1 KR102129890B1 (ko) | 2020-07-06 |
Family
ID=59353881
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150187106A Expired - Fee Related KR102129890B1 (ko) | 2015-12-28 | 2015-12-28 | 스프링 구조 일체형 토크 센서 및 그 구조물 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102129890B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112362200A (zh) * | 2020-11-23 | 2021-02-12 | 广西大学 | 一种十字型双直梁电容式扭矩传感器 |
| CN116124073A (zh) * | 2023-04-20 | 2023-05-16 | 江苏神铸智能科技有限公司 | 一种可自适应不同厚度的铝合金板平整度检测机 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20050001828A (ko) * | 2003-06-26 | 2005-01-07 | 주식회사 만도 | 비접촉식 토크센서 |
| KR20070084807A (ko) * | 2006-02-22 | 2007-08-27 | 경상대학교산학협력단 | 로봇팔목 6축 힘/모멘트 센서 |
| JP2012521547A (ja) * | 2009-03-25 | 2012-09-13 | ホッティンゲル・バルドヴィン・メステクニーク・ゲゼルシヤフト・ミト・ベシュレンクテル・ハフツング | トルクセンサ |
| KR101280899B1 (ko) * | 2011-12-27 | 2013-07-05 | 전자부품연구원 | 로봇 관절용 1축 토크 센서 |
| KR101460031B1 (ko) * | 2013-12-23 | 2014-11-12 | 전자부품연구원 | 1축 토크 센서 및 그를 이용한 1축 관절 모듈 |
| KR101509578B1 (ko) | 2013-11-29 | 2015-04-08 | 전자부품연구원 | 구동축의 절대 위치 산출 장치 및 방법 |
-
2015
- 2015-12-28 KR KR1020150187106A patent/KR102129890B1/ko not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20050001828A (ko) * | 2003-06-26 | 2005-01-07 | 주식회사 만도 | 비접촉식 토크센서 |
| KR20070084807A (ko) * | 2006-02-22 | 2007-08-27 | 경상대학교산학협력단 | 로봇팔목 6축 힘/모멘트 센서 |
| JP2012521547A (ja) * | 2009-03-25 | 2012-09-13 | ホッティンゲル・バルドヴィン・メステクニーク・ゲゼルシヤフト・ミト・ベシュレンクテル・ハフツング | トルクセンサ |
| KR101280899B1 (ko) * | 2011-12-27 | 2013-07-05 | 전자부품연구원 | 로봇 관절용 1축 토크 센서 |
| KR101509578B1 (ko) | 2013-11-29 | 2015-04-08 | 전자부품연구원 | 구동축의 절대 위치 산출 장치 및 방법 |
| KR101460031B1 (ko) * | 2013-12-23 | 2014-11-12 | 전자부품연구원 | 1축 토크 센서 및 그를 이용한 1축 관절 모듈 |
Non-Patent Citations (1)
| Title |
|---|
| <논문> * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112362200A (zh) * | 2020-11-23 | 2021-02-12 | 广西大学 | 一种十字型双直梁电容式扭矩传感器 |
| CN116124073A (zh) * | 2023-04-20 | 2023-05-16 | 江苏神铸智能科技有限公司 | 一种可自适应不同厚度的铝合金板平整度检测机 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102129890B1 (ko) | 2020-07-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102230369B1 (ko) | 토크 센서 장치 및 토크를 측정하기 위한 방법 | |
| US7743672B2 (en) | Multiple axis load cell controller | |
| JP6135408B2 (ja) | トルクセンサ、駆動装置、及びロボット | |
| KR101141719B1 (ko) | 로봇 관절의 토크 센서의 조정 장치 및 이에 의한 토크 센서의 조정 방법 | |
| US20120180574A1 (en) | Load cell for monitoring torsion and having overload protection | |
| JP5640905B2 (ja) | 起歪体及びこれを含む装置 | |
| CN103359279A (zh) | 具有被保护的力传感器的飞行器操控装置 | |
| KR102003906B1 (ko) | 관절토크센서를 구비하는 로봇 관절 유닛 | |
| US10421532B2 (en) | Connecting rod for a flight control surface actuation system | |
| CN109959359A (zh) | 应变传感器、多轴力传感器及机器人 | |
| JP2007500361A (ja) | ひずみに基づく器具のための改善されたたわみシステム | |
| ES2973245T3 (es) | Procedimiento para corregir una desalineación de al menos un tren de ejes | |
| CN103743508B (zh) | 扭转力矩测试系统及其扭矩传感器装置 | |
| JP6734372B2 (ja) | 力測定装置 | |
| KR20170077875A (ko) | 스프링 구조 일체형 토크 센서 및 그 구조물 | |
| US8569988B2 (en) | Elastic rotary actuator, particularly for robotic applications, and method for controlling the same | |
| KR102163960B1 (ko) | 유연 관절 모듈 | |
| KR102704645B1 (ko) | 특히, 차량용 액추에이터 시스템 | |
| WO2019116817A1 (ja) | 荷重センサおよび電動ブレーキ | |
| JPH11230838A (ja) | トルクメータ | |
| JP2018036097A (ja) | 角度位置検出装置 | |
| JP2010139395A (ja) | トルクセンサ及び同センサを備えたステアリング | |
| ES2672357T3 (es) | Banco de pruebas de freno de automóvil | |
| KR100737168B1 (ko) | 관절 토오크 측정을 위한 액츄에이터 일체형 관절 토오크센서 | |
| KR102018312B1 (ko) | 힘 측정이 가능한 구동 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20250630 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| H13 | Ip right lapsed |
Free format text: ST27 STATUS EVENT CODE: N-4-6-H10-H13-OTH-PC1903 (AS PROVIDED BY THE NATIONAL OFFICE); TERMINATION CATEGORY : DEFAULT_OF_REGISTRATION_FEE Effective date: 20250630 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20250630 |