KR20170083854A - 가변형 바퀴가 장착된 이동로봇 - Google Patents
가변형 바퀴가 장착된 이동로봇 Download PDFInfo
- Publication number
- KR20170083854A KR20170083854A KR1020160003253A KR20160003253A KR20170083854A KR 20170083854 A KR20170083854 A KR 20170083854A KR 1020160003253 A KR1020160003253 A KR 1020160003253A KR 20160003253 A KR20160003253 A KR 20160003253A KR 20170083854 A KR20170083854 A KR 20170083854A
- Authority
- KR
- South Korea
- Prior art keywords
- wheel
- mobile robot
- unit
- spokes
- obstacle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B9/00—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces
- B60B9/26—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces comprising resilient spokes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B9/00—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces
- B60B9/26—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces comprising resilient spokes
- B60B9/28—Wheels of high resiliency, e.g. with conical interacting pressure-surfaces comprising resilient spokes with telescopic action
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
상기한 목적을 달성하기 위한 본 발명의 가변형 바퀴가 장착된 이동로봇은,
좌우 양측에 구동축(111)이 형성된 구동모터(110)가 설치된 몸체(100); 상기 몸체(100)의 외면 일측에 형성된 센서부(200); 상기 몸체(100)의 일측에 형성된 제어부(300); 상기 구동모터(110)의 동력을 전달받아 회전되는 회전축(410)과, 상기 회전축(410)의 선단에 형성되는 바퀴허브(420)와, 상기 바퀴허브(420)의 외주면에 일정간격으로 이격되어 방사상으로 다수개 설치되는 길이가 조절되는 스포크(430)와, 상기 스포크(430)의 선단에 각각 형성되어 노면에 접지되는 접지부(440)로 구성된 바퀴유닛(400); 으로 이루어지며 상기 바퀴유닛(400)이 상기 구동모터(110)의 좌우 양측에 형성된 구동축(111)에 각각 설치되어 된 것을 특징으로 한다.
Description
도 2는 본 발명의 스포크의 길이가 확장된 상태를 나타낸 사시도,
도 3은 본 발명의 가변형 바퀴가 장착된 이동로봇의 바퀴유닛을 분리한 사시도,
도 4는 본 발명의 가변형 바퀴가 장착된 이동로봇이 이동수단의 바퀴로 적용된 상태도,
도 5는 본 발명의 가변형 바퀴가 장착된 이동로봇이 전후로 각각 배치되고 연결프레임에 의해 이격되게 설치된 상태를 나타낸 사시도,
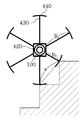
도 6은 본 발명의 가변형 바퀴가 장착된 이동로봇이 계단을 승월하는 상태를 나타낸 개략도,
도 7은 본 발명의 가변형 바퀴가 장착된 이동로봇이 계단을 승월하는 다른 상태를 나타낸 개략도,
도 8은 본 발명의 가변형 바퀴가 장착된 이동로봇이 좌우로 경사진 노면을 이동하는 상태를 나타낸 개략도,
도 9는 본 발명의 가변형 바퀴가 장착된 이동로봇이 경사로를 등판하는 상태를 나타낸 개략도.



111 : 구동축 200 : 센서부
210 : 거리감지센서 220 : 기울기센서
300 : 제어부 400 : 바퀴유닛
410 : 회전축 420 : 바퀴허브
430 : 스포크 440 : 접지부
500 : 이동수단 600 : 연결프레임
Claims (4)
- 좌우 양측에 구동축(111)이 형성된 구동모터(110)가 설치된 몸체(100);
상기 몸체(100)의 외면 일측에 주행영역의 장애물정보와, 몸체(100)의 기울기를 측정하기 위해 형성된 센서부(200);
상기 몸체(100)의 일측에 상기 센서부(200)로부터 전달된 수치를 계산하여 바퀴유닛(400)을 제어하기 위해 형성된 제어부(300);
상기 구동모터(110)의 동력을 전달받아 회전되는 회전축(410)과, 상기 회전축(410)의 선단에 형성되는 바퀴허브(420)와, 상기 바퀴허브(420)의 외주면에 일정간격으로 이격되어 방사상으로 다수개 설치되는 길이가 조절되는 스포크(430)와, 상기 스포크(430)의 선단에 각각 형성되어 노면에 접지되는 접지부(440)로 구성된 바퀴유닛(400); 으로 이루어지며,
상기 바퀴유닛(400)이 상기 구동모터(110)의 좌우 양측에 형성된 구동축(111)에 각각 설치되어 된 것을 특징으로 하는 가변형 바퀴가 장착된 이동로봇. - 제 1항에 있어서,
상기 센서부(200)는 이동로봇과 장애물간의 거리를 감지하는 거리감지수단(210)과, 상기 몸체(100)의 기울기를 감지하는 기울기센서(220)로 구성된 것을 특징으로 하는 가변형 바퀴가 장착된 이동로봇.
- 제 1항에 있어서,
상기 가변형 바퀴가 장착된 이동로봇은 이동수단(500)의 바퀴로 사용되는 것을 특징으로 하는 가변형 바퀴가 장착된 이동로봇. - 제 1항에 있어서,
상기 가변형 바퀴가 장착된 이동로봇은 전후로 각각 배치되고 연결프레임(600)에 의해 이격되게 연결설치된 것을 특징으로 하는 가변형 바퀴가 장착된 이동로봇.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160003253A KR20170083854A (ko) | 2016-01-11 | 2016-01-11 | 가변형 바퀴가 장착된 이동로봇 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160003253A KR20170083854A (ko) | 2016-01-11 | 2016-01-11 | 가변형 바퀴가 장착된 이동로봇 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170083854A true KR20170083854A (ko) | 2017-07-19 |
Family
ID=59427558
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160003253A Ceased KR20170083854A (ko) | 2016-01-11 | 2016-01-11 | 가변형 바퀴가 장착된 이동로봇 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170083854A (ko) |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180081667A (ko) * | 2017-01-07 | 2018-07-17 | 고인순 | 자전거 바퀴 휠 |
| KR101984854B1 (ko) * | 2018-01-29 | 2019-06-03 | (주)세진티비엠 | 세그멘트 바퀴 및 세그멘트 바퀴가 조립된 대차 |
| KR102015000B1 (ko) | 2019-07-15 | 2019-08-27 | 채승학 | 변형바퀴를 갖는 주행장치 |
| KR20190103852A (ko) * | 2018-02-28 | 2019-09-05 | 공주대학교 산학협력단 | 수륙양용보트의 스포크휠 |
| KR20190103851A (ko) * | 2018-02-28 | 2019-09-05 | 공주대학교 산학협력단 | 수륙양용보트의 실린더휠 |
| US10525766B2 (en) | 2017-09-22 | 2020-01-07 | Keir P. Daniels | Wheel with adjustable radius and tread firmness |
| KR20200062695A (ko) | 2018-11-27 | 2020-06-04 | 한국기계연구원 | 가변강성 바퀴 및 이의 구동제어방법 |
| KR20200069605A (ko) * | 2018-12-07 | 2020-06-17 | 넥센타이어 주식회사 | 실린더 타이어 |
| WO2020122587A1 (ko) * | 2018-12-11 | 2020-06-18 | 서울대학교산학협력단 | 변형 바퀴 및 이를 구비한 로봇 |
| KR20200118261A (ko) * | 2019-04-02 | 2020-10-15 | 한국기계연구원 | 지체장애인 독립활동 지원 로봇 |
| KR20210035944A (ko) * | 2019-09-24 | 2021-04-02 | 한국타이어앤테크놀로지 주식회사 | 분할조립이 가능하고 유연한 자동차 휠 |
| CN112937650A (zh) * | 2021-01-26 | 2021-06-11 | 江苏远平园林建设有限公司 | 一种便于越过路坑的市政工程用混凝土道路辅助行走装置 |
| KR20210155661A (ko) | 2020-06-16 | 2021-12-23 | 한국기계연구원 | 아치 메커니즘을 이용한 장애물 극복용 바퀴유닛 및 이를 포함하는 회전 구동모듈 |
| KR20210155662A (ko) | 2020-06-16 | 2021-12-23 | 한국기계연구원 | 표면장력 메커니즘을 이용한 장애물 극복용 바퀴유닛 |
| KR20220031818A (ko) | 2020-09-04 | 2022-03-14 | 선문대학교 산학협력단 | 가변형 휠 유니트가 구비된 휠체어 로봇 |
| KR20220043864A (ko) | 2020-09-29 | 2022-04-05 | 엘지전자 주식회사 | 로봇 및 그 제어방법 |
| WO2022145591A1 (ko) * | 2020-12-30 | 2022-07-07 | (주)필드로 | 단차 주행이 가능한 독립 서스펜션 바퀴장치 및 이를 포함하는 주행장치 |
| KR20220099318A (ko) | 2021-01-06 | 2022-07-13 | 한국기계연구원 | 복합 구조로 형성된 장애물 극복용 바퀴유닛 |
| KR20220101958A (ko) | 2021-01-12 | 2022-07-19 | 한국기계연구원 | 다분절 블록을 포함하는 장애물 극복용 바퀴유닛 |
| KR20230089384A (ko) | 2021-12-13 | 2023-06-20 | 엘지전자 주식회사 | 로봇 |
| US20230409051A1 (en) * | 2022-06-15 | 2023-12-21 | Hyundai Motor Company | Apparatus for Controlling Robot and Method Thereof |
| KR20240005339A (ko) * | 2022-07-05 | 2024-01-12 | 부산대학교 산학협력단 | 가변 형태를 갖는 휠 어셈블리 및 이를 포함하는 시스템 |
| KR20240007953A (ko) | 2020-09-29 | 2024-01-17 | 엘지전자 주식회사 | 로봇 및 그 제어방법 |
| US12253864B2 (en) | 2022-06-15 | 2025-03-18 | Hyundai Motor Company | Apparatus for controlling driving of moving object and method thereof |
| US12427805B2 (en) | 2022-06-15 | 2025-09-30 | Hyundai Motor Company | Wheel structure, method of controlling wheel structure, and mobility including wheel structure |
| US12522018B2 (en) | 2020-09-29 | 2026-01-13 | Iucf-Hyu (Industry-University Cooperation Foundation Hanyang University) | Transformable wheel module |
| US12583252B2 (en) | 2022-09-30 | 2026-03-24 | Hyundai Motor Company | Wheel structure and method of controlling wheel structure |
-
2016
- 2016-01-11 KR KR1020160003253A patent/KR20170083854A/ko not_active Ceased
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180081667A (ko) * | 2017-01-07 | 2018-07-17 | 고인순 | 자전거 바퀴 휠 |
| US10525766B2 (en) | 2017-09-22 | 2020-01-07 | Keir P. Daniels | Wheel with adjustable radius and tread firmness |
| KR101984854B1 (ko) * | 2018-01-29 | 2019-06-03 | (주)세진티비엠 | 세그멘트 바퀴 및 세그멘트 바퀴가 조립된 대차 |
| KR20190103852A (ko) * | 2018-02-28 | 2019-09-05 | 공주대학교 산학협력단 | 수륙양용보트의 스포크휠 |
| KR20190103851A (ko) * | 2018-02-28 | 2019-09-05 | 공주대학교 산학협력단 | 수륙양용보트의 실린더휠 |
| KR20200062695A (ko) | 2018-11-27 | 2020-06-04 | 한국기계연구원 | 가변강성 바퀴 및 이의 구동제어방법 |
| KR20200069605A (ko) * | 2018-12-07 | 2020-06-17 | 넥센타이어 주식회사 | 실린더 타이어 |
| WO2020122587A1 (ko) * | 2018-12-11 | 2020-06-18 | 서울대학교산학협력단 | 변형 바퀴 및 이를 구비한 로봇 |
| US12358322B2 (en) | 2018-12-11 | 2025-07-15 | Seoul National University R&Db Foundation | Deformable wheel and robot equipped with same |
| KR20200118261A (ko) * | 2019-04-02 | 2020-10-15 | 한국기계연구원 | 지체장애인 독립활동 지원 로봇 |
| KR102015000B1 (ko) | 2019-07-15 | 2019-08-27 | 채승학 | 변형바퀴를 갖는 주행장치 |
| KR20210035944A (ko) * | 2019-09-24 | 2021-04-02 | 한국타이어앤테크놀로지 주식회사 | 분할조립이 가능하고 유연한 자동차 휠 |
| KR20210155661A (ko) | 2020-06-16 | 2021-12-23 | 한국기계연구원 | 아치 메커니즘을 이용한 장애물 극복용 바퀴유닛 및 이를 포함하는 회전 구동모듈 |
| KR20210155662A (ko) | 2020-06-16 | 2021-12-23 | 한국기계연구원 | 표면장력 메커니즘을 이용한 장애물 극복용 바퀴유닛 |
| KR20220031818A (ko) | 2020-09-04 | 2022-03-14 | 선문대학교 산학협력단 | 가변형 휠 유니트가 구비된 휠체어 로봇 |
| US12522018B2 (en) | 2020-09-29 | 2026-01-13 | Iucf-Hyu (Industry-University Cooperation Foundation Hanyang University) | Transformable wheel module |
| KR20220043864A (ko) | 2020-09-29 | 2022-04-05 | 엘지전자 주식회사 | 로봇 및 그 제어방법 |
| KR20240007953A (ko) | 2020-09-29 | 2024-01-17 | 엘지전자 주식회사 | 로봇 및 그 제어방법 |
| US12060123B2 (en) | 2020-09-29 | 2024-08-13 | Lg Electronics Inc. | Robot |
| WO2022145591A1 (ko) * | 2020-12-30 | 2022-07-07 | (주)필드로 | 단차 주행이 가능한 독립 서스펜션 바퀴장치 및 이를 포함하는 주행장치 |
| KR20220099318A (ko) | 2021-01-06 | 2022-07-13 | 한국기계연구원 | 복합 구조로 형성된 장애물 극복용 바퀴유닛 |
| KR20220101958A (ko) | 2021-01-12 | 2022-07-19 | 한국기계연구원 | 다분절 블록을 포함하는 장애물 극복용 바퀴유닛 |
| CN112937650B (zh) * | 2021-01-26 | 2022-01-04 | 江苏远平园林建设有限公司 | 一种便于越过路坑的市政工程用混凝土道路辅助行走装置 |
| CN112937650A (zh) * | 2021-01-26 | 2021-06-11 | 江苏远平园林建设有限公司 | 一种便于越过路坑的市政工程用混凝土道路辅助行走装置 |
| KR20230089384A (ko) | 2021-12-13 | 2023-06-20 | 엘지전자 주식회사 | 로봇 |
| US20230409051A1 (en) * | 2022-06-15 | 2023-12-21 | Hyundai Motor Company | Apparatus for Controlling Robot and Method Thereof |
| US12253864B2 (en) | 2022-06-15 | 2025-03-18 | Hyundai Motor Company | Apparatus for controlling driving of moving object and method thereof |
| US12287646B2 (en) | 2022-06-15 | 2025-04-29 | Hyundai Motor Company | Apparatus for controlling robot and method thereof |
| US12427805B2 (en) | 2022-06-15 | 2025-09-30 | Hyundai Motor Company | Wheel structure, method of controlling wheel structure, and mobility including wheel structure |
| KR20240005339A (ko) * | 2022-07-05 | 2024-01-12 | 부산대학교 산학협력단 | 가변 형태를 갖는 휠 어셈블리 및 이를 포함하는 시스템 |
| US12583252B2 (en) | 2022-09-30 | 2026-03-24 | Hyundai Motor Company | Wheel structure and method of controlling wheel structure |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170083854A (ko) | 가변형 바퀴가 장착된 이동로봇 | |
| US12005753B2 (en) | System and method for traversing vertical obstacles | |
| US11572117B2 (en) | Obstacle traversing mobile robot | |
| US11052002B2 (en) | Vehicle wheel assembly | |
| KR102422354B1 (ko) | 가변형 휠 유니트가 구비된 휠체어 로봇 | |
| JP2014161991A (ja) | ロボットの移動機構及びそれを備えるロボット | |
| JP6569342B2 (ja) | 移動ロボット | |
| JP6601001B2 (ja) | 走行装置、案内用ロボット及び走行装置の制御方法 | |
| JP6998287B2 (ja) | 走行車両 | |
| JP2016024766A (ja) | 案内用ロボット | |
| KR20180074871A (ko) | 휠-레그를 장착한 세그웨이 | |
| JP2009095933A (ja) | 車両の転倒防止装置および脚車輪型ロボット | |
| JP2018039310A (ja) | 旅客搭乗橋 | |
| JP2004097712A (ja) | 四足歩行装置 | |
| JP2015083927A (ja) | 案内用ロボット | |
| KR101734517B1 (ko) | 관절형 다리를 갖는 보행보조장치 | |
| JP5573993B1 (ja) | 障害物回避先導ロボット | |
| CN112930298B (zh) | 方向盘角度控制装置 | |
| JP2023112721A (ja) | 移動ロボット、移動ロボットの制振方法、及びプログラム | |
| CN117021049A (zh) | 一种智能导盲协作机器人 | |
| TR2021019459A2 (tr) | Mağara ve meskun mahal i̇nsansiz kara araci | |
| JPH03127918U (ko) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160111 |
|
| PA0201 | Request for examination | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20170117 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20170728 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20170117 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |