KR20170100445A - 자기장의 각도를 측정하는 방법 및 각도 센서 - Google Patents
자기장의 각도를 측정하는 방법 및 각도 센서 Download PDFInfo
- Publication number
- KR20170100445A KR20170100445A KR1020170024482A KR20170024482A KR20170100445A KR 20170100445 A KR20170100445 A KR 20170100445A KR 1020170024482 A KR1020170024482 A KR 1020170024482A KR 20170024482 A KR20170024482 A KR 20170024482A KR 20170100445 A KR20170100445 A KR 20170100445A
- Authority
- KR
- South Korea
- Prior art keywords
- magnetic field
- angle
- voltage
- current
- field sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0005—Geometrical arrangement of magnetic sensor elements; Apparatus combining different magnetic sensor types
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
- G01R33/077—Vertical Hall-effect devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
- G01R33/072—Constructional adaptation of the sensor to specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/07—Hall effect devices
- G01R33/072—Constructional adaptation of the sensor to specific applications
- G01R33/075—Hall devices configured for spinning current measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
- G01R33/091—Constructional adaptation of the sensor to specific applications
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Measuring Magnetic Variables (AREA)
Abstract
Description
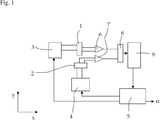
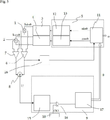
도 1은 본 발명에 따른 각도 센서의 개략도를 도시한다.
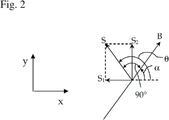
도 2는 각도 센서의 감도 벡터 S와 자기장 B 사이의 관계를 예시하는 도면을 도시한다.
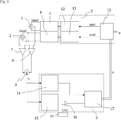
도 3은 본 발명에 따른 각도 센서의 일 실시형태를 도시한다.
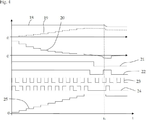
도 4는 수 개의 신호 다이어그램을 도시한다.
도 5는 본 발명에 따른 각도 센서의 또 다른 실시형태를 도시한다.
도 6은 홀 소자들을 구비한 본 발명에 따른 각도 센서의 일 실시형태를 도시한다.
Claims (6)
- - 제1 감도 방향을 갖고 두 개의 전류 단자들과 두 개의 전압 단자들을 갖는, 제1 자기장 센서(1),
- 제2 감도 방향을 갖고 두 개의 전류 단자들과 두 개의 전압 단자들을 갖는, 제2 자기장 센서(2),
- 제1 자기장 센서(1)의 전류 단자들에 제1 바이어싱 전류 I1을 공급하는 제1 전류원(3),
- 제2 자기장 센서(2)의 전류 단자들에 제2 바이어싱 전류 I2를 공급하는 제2 전류원(4), 및
- 신호 U가 0과 같아질 때까지 상기 바이어싱 전류들 I1 및 I2를 변화시킴으로써 각도 센서의 감도 방향을 회전시키도록 그리고 신호 U가 0과 같아졌을 때 각도 센서의 감도 방향으로부터 각도 α를 측정하도록 구성된, 폐쇄 제어 루프를 형성하는 전자 회로
를 포함하는, 평면 내에서의 자기장의 방향을 나타내는 각도 α를 측정하도록 구성된 각도 센서로서,
제1 자기장 센서(1) 및 제2 자기장 센서(2)의 전압 단자들이 직렬로 연결되고 직렬 연결된 전압 단자들에 걸쳐 나타나는 전압이 태핑 및 증폭되어 신호 U를 전달하거나, 또는 제1 자기장 센서(1) 및 제2 자기장 센서(2)의 전압 단자들이 병렬로 연결되고 병렬 연결된 전압 단자들에서 나타나는 전압이 태핑 및 증폭되어 신호 U를 전달하거나, 또는 각도 센서가, 제1 자기장 센서(1)의 전압 단자들에 연결되는 제1 증폭기(6), 제2 자기장 센서(2)의 전압 단자들에 연결되는 제2 증폭기(7), 및, 제1 증폭기(6) 및 제2 증폭기(7)의 출력부들에 연결되고 신호 U를 전달하는 출력부를 갖는, 합산 접합부(8)를 포함하는 것을 특징으로 하는, 각도 센서. - 제1항에 있어서,
상기 제1 감도 방향과 상기 제2 감도 방향은 각도 δ를 포함하고,
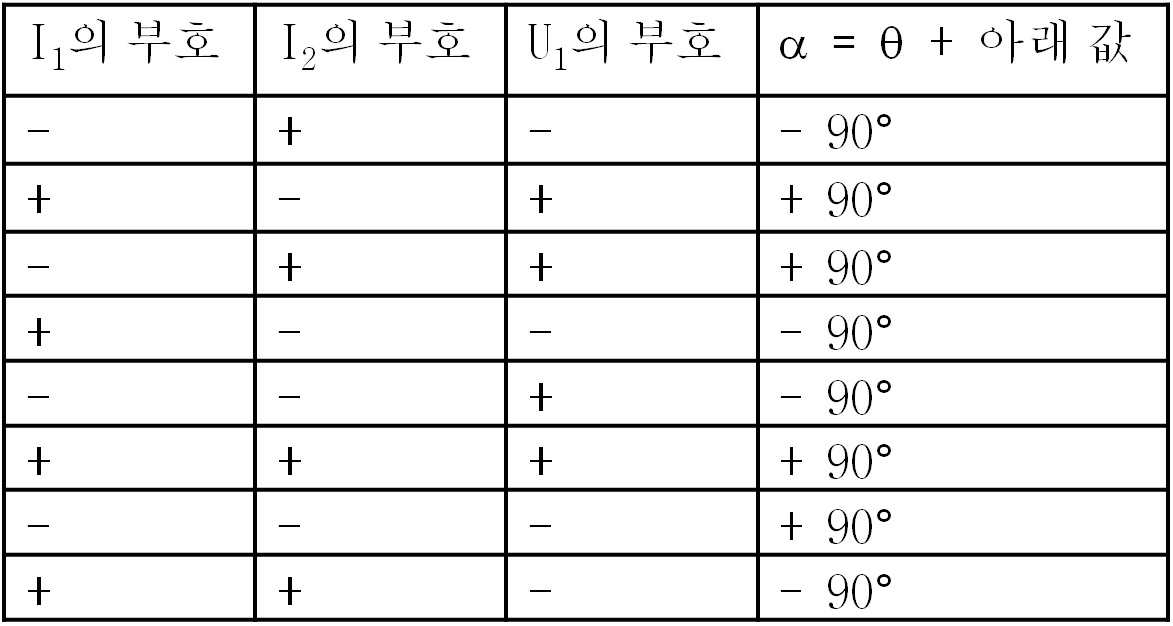
상기 전자 회로는 제1 바이어싱 전류 I1을 I1 = I * sin δ * cos θ 로서 그리고 제2 바이어싱 전류를 I2 = I * (sin δ - cos δ) * sin δ * sin θ 로서 제공함으로써 그리고 각도 θ를 변화시킴으로써 각도 센서의 감도 방향을 회전시키도록 구성되며, 양 I는 공칭 전류 세기를 나타내고 양 θ는 각도를 나타내며,
상기 전자 회로는 α = θ - 90° 또는 α = θ + 90°로 각도 α를 측정하도록 추가로 구성되는 것을 특징으로 하는, 각도 센서. - 제2항에 있어서,
상기 각도 δ는 90°인 것을 특징으로 하는, 각도 센서. - 다음 단계들을 포함하는, 평면 내에서의 자기장의 방향을 나타내는 각도 α를 측정하는 방법:
- 제1 감도 방향을 갖고 제1 전압 U1을 전달하는, 제1 자기장 센서(1)를 제공하는 단계,
- 제2 감도 방향을 갖고 제2 전압 U2를 전달하는, 제2 자기장 센서(2)를 제공하는 단계,
- 제1 바이어싱 전류 I1을 제1 자기장 센서(1)에 공급하는 단계,
- 제2 바이어싱 전류 I2를 제2 자기장 센서(2)에 공급하는 단계,
- 제1 전압 U1과 제2 전압 U2의 합에 비례하는 신호 U를 형성하는 단계,
- 신호 U가 0과 같아질 때까지 바이어싱 전류들 I1 및 I2를 조절하는 단계, 및
- 신호 U가 0과 같아졌을 때 바이어싱 전류들 I1 및 I2의 조절된 값에 기초하여 각도 α를 측정하는 단계. - 제4항에 있어서,
신호 U가 0과 같아질 때까지 바이어싱 전류들 I1 및 I2를 조절하는 단계는, 제1 바이어싱 전류 I1을 I1 = I * sin δ * cos θ 로서 그리고 제2 바이어싱 전류를 I2 = I * (sin δ - cos δ) * sin δ * sin θ 로서 제공하고 신호 U가 0과 같아질 때까지 각도 θ를 변화시킴으로써 일어나며, 양 I는 공칭 전류 세기를 나타내고, 양 θ는 각도를 나타내고, 양 δ는 제1 감도 방향 및 제2 감도 방향이 포함하는 각도를 나타내며,
각도 α는 α = θ - 90° 또는 α = θ + 90°로 측정되는 것을 특징으로 하는 방법. - 제5항에 있어서,
각도 δ는 90°인 것을 특징으로 하는 방법.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16157316 | 2016-02-25 | ||
| EP16157316.7 | 2016-02-25 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170100445A true KR20170100445A (ko) | 2017-09-04 |
| KR102636168B1 KR102636168B1 (ko) | 2024-02-13 |
Family
ID=55436041
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170024482A Active KR102636168B1 (ko) | 2016-02-25 | 2017-02-24 | 자기장의 각도를 측정하는 방법 및 각도 센서 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9995797B2 (ko) |
| EP (1) | EP3211381B1 (ko) |
| JP (1) | JP6833204B2 (ko) |
| KR (1) | KR102636168B1 (ko) |
| CN (1) | CN107121648B (ko) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3467443B1 (en) | 2017-10-05 | 2021-08-18 | ams AG | Position sensor and method for position sensing and diagnostic |
| CN109324740B (zh) * | 2018-09-30 | 2022-07-26 | 联想(北京)有限公司 | 一种处理方法及处理终端 |
| KR20220149664A (ko) * | 2020-03-02 | 2022-11-08 | 크로커스 테크놀러지 에스에이 | 2차원 평면에서 외부 자기장 각도를 측정하기 위한 자기 센서 및 자기 센서를 사용하여 상기 각도를 측정하는 방법 |
| CN112325755A (zh) * | 2020-11-03 | 2021-02-05 | 上海艾为电子技术股份有限公司 | 一种位置传感系统、获取位置传感信号的方法及电子设备 |
| US20230016196A1 (en) * | 2021-07-15 | 2023-01-19 | Analog Devices International Unlimited Company | Magnetic sensing device |
| EP4170287B1 (en) * | 2021-10-25 | 2024-10-16 | Melexis Technologies SA | Circuit and method for determining angular position |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6545462B2 (en) * | 2000-08-21 | 2003-04-08 | Sentron Ag | Sensor for the detection of the direction of a magnetic field having magnetic flux concentrators and hall elements |
| JP2009102460A (ja) * | 2007-10-19 | 2009-05-14 | Gunma Industry Support Organization | フィッシャー・トロプシュ合成法による炭化水素類の製造方法 |
| JP2011516873A (ja) * | 2008-04-08 | 2011-05-26 | エコール ポリテクニーク フェデラレ デ ローザンヌ (イーピーエフエル) | 平面内の磁界方向を測定する磁界センサ及び電流センサ |
| US8324891B2 (en) * | 2007-05-29 | 2012-12-04 | Ecole Polytechnique Federale De Lausanne (Epfl) | Magnetic field sensor for measuring a direction of a magnetic field in a plane |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6031005A (ja) * | 1983-07-29 | 1985-02-16 | Toshiba Corp | 回転角位置検出器 |
| JP2570654B2 (ja) * | 1987-12-08 | 1997-01-08 | 日本精工株式会社 | 変位検出装置 |
| US5712560A (en) * | 1994-09-01 | 1998-01-27 | Kabushiki Kaisha Toshiba | Drive speed detector for a motor that drives a data reproducing device |
| EP0740776B1 (de) * | 1994-11-22 | 2002-06-12 | Robert Bosch Gmbh | Anordnung zur berührungslosen drehwinkelerfassung eines drehbaren elements |
| DE59609089D1 (de) | 1995-10-30 | 2002-05-23 | Sentron Ag Zug | Magnetfeldsensor und Strom- oder Energiesensor |
| AU2003277879A1 (en) | 2003-08-22 | 2005-04-11 | Sentron Ag | Sensor for detecting the direction of a magnetic field in a plane |
| DE102004010613B4 (de) * | 2004-03-02 | 2015-04-02 | Austriamicrosystems Ag | Magnetfeldsensor und Verfahren zu seinem Betrieb |
| JP2007057501A (ja) * | 2005-08-26 | 2007-03-08 | Tokai Rika Co Ltd | 角度検出装置 |
| WO2007126023A1 (ja) * | 2006-04-27 | 2007-11-08 | Asahi Kasei Emd Corporation | 位置検出装置及び位置検出方法 |
| JP2008008883A (ja) * | 2006-06-02 | 2008-01-17 | Denso Corp | 磁気センサ及びセンサ |
| EP2000814B1 (en) | 2007-06-04 | 2011-10-26 | Melexis NV | Magnetic field orientation sensor |
| EP2028450A2 (en) * | 2007-07-27 | 2009-02-25 | Melexis NV | Position sensor |
| EP2330432B1 (en) * | 2009-11-19 | 2013-01-09 | Nxp B.V. | Magnetic field sensor |
| US8508218B2 (en) | 2011-05-11 | 2013-08-13 | Sensima Technology Sa | Hall-effect-based angular orientation sensor and corresponding method |
| US8922206B2 (en) | 2011-09-07 | 2014-12-30 | Allegro Microsystems, Llc | Magnetic field sensing element combining a circular vertical hall magnetic field sensing element with a planar hall element |
| US8963540B2 (en) | 2012-09-07 | 2015-02-24 | Sensima Technology Sa | Hall-effect-based angular orientation sensor and corresponding methods and devices |
| US8749005B1 (en) | 2012-12-21 | 2014-06-10 | Allegro Microsystems, Llc | Magnetic field sensor and method of fabricating a magnetic field sensor having a plurality of vertical hall elements arranged in at least a portion of a polygonal shape |
| EP3019830B1 (en) | 2013-07-11 | 2019-03-27 | MPS Tech Switzerland Sàrl | Angular orientation sensor and corresponding methods and devices |
| CN103630853B (zh) * | 2013-08-20 | 2016-04-13 | 中国科学院电子学研究所 | 感应式磁场传感器 |
| GB201315964D0 (en) | 2013-09-06 | 2013-10-23 | Melexis Technologies Nv | Magnetic field orientation sensor and angular position sensor using same |
| US10073136B2 (en) * | 2013-12-26 | 2018-09-11 | Allegro Microsystems, Llc | Methods and apparatus for sensor diagnostics including sensing element operation |
| CN204287456U (zh) * | 2014-11-24 | 2015-04-22 | 山东科技大学 | 一种新型磁场传感器 |
-
2017
- 2017-02-21 JP JP2017030354A patent/JP6833204B2/ja active Active
- 2017-02-23 EP EP17157517.8A patent/EP3211381B1/en active Active
- 2017-02-24 KR KR1020170024482A patent/KR102636168B1/ko active Active
- 2017-02-24 US US15/442,397 patent/US9995797B2/en active Active
- 2017-02-27 CN CN201710107506.6A patent/CN107121648B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6545462B2 (en) * | 2000-08-21 | 2003-04-08 | Sentron Ag | Sensor for the detection of the direction of a magnetic field having magnetic flux concentrators and hall elements |
| US8324891B2 (en) * | 2007-05-29 | 2012-12-04 | Ecole Polytechnique Federale De Lausanne (Epfl) | Magnetic field sensor for measuring a direction of a magnetic field in a plane |
| JP2009102460A (ja) * | 2007-10-19 | 2009-05-14 | Gunma Industry Support Organization | フィッシャー・トロプシュ合成法による炭化水素類の製造方法 |
| JP2011516873A (ja) * | 2008-04-08 | 2011-05-26 | エコール ポリテクニーク フェデラレ デ ローザンヌ (イーピーエフエル) | 平面内の磁界方向を測定する磁界センサ及び電流センサ |
| US8624587B2 (en) * | 2008-04-08 | 2014-01-07 | Senis Ag | Magnetic field sensor measuring a direction of a magnetic field in a plane and current sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3211381A1 (en) | 2017-08-30 |
| CN107121648B (zh) | 2020-08-25 |
| KR102636168B1 (ko) | 2024-02-13 |
| JP2017151102A (ja) | 2017-08-31 |
| US9995797B2 (en) | 2018-06-12 |
| EP3211381B1 (en) | 2018-06-06 |
| US20170248661A1 (en) | 2017-08-31 |
| CN107121648A (zh) | 2017-09-01 |
| JP6833204B2 (ja) | 2021-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170100445A (ko) | 자기장의 각도를 측정하는 방법 및 각도 센서 | |
| US10578679B2 (en) | Magnetic field sensors having virtual signals | |
| US9404991B2 (en) | Autonomously calibrated magnetic field sensor | |
| US7599810B2 (en) | Position detecting circuit and apparatus using the same | |
| KR100564866B1 (ko) | 각도 검출 장치 및 각도 검출 시스템 | |
| US6534969B1 (en) | Offset-compensated angle measuring system | |
| EP2108966A1 (en) | Current sensor and assembly group for current measurement | |
| KR100541081B1 (ko) | 전자 나침반용 신호 처리기 | |
| EP3469384A1 (en) | Magnetic field sensor having alignment error correction | |
| EP3855127B1 (en) | Single channel magnetoresistance-based angle sensor | |
| US9638766B2 (en) | Magnetic field sensor with improved accuracy resulting from a variable potentiometer and a gain circuit | |
| US11125837B2 (en) | Magnetic field sensor offset and gain adjustment | |
| JP5144528B2 (ja) | 回転角度検出装置 | |
| US10690731B2 (en) | Magnetic field sensor with adaptive threshold and associated methods | |
| WO2020188513A1 (en) | Electronic circuit for measuring an angle and an intensity of an external magnetic field | |
| US10794936B2 (en) | Magnetic field sensor providing constant voltage across magnetoresistance elements | |
| US10900811B2 (en) | Displacement detection device | |
| CN101006355A (zh) | 磁检测装置及使用了该装置的电子方位仪 | |
| US20100219815A1 (en) | Magnetic Rotary Encoder and Method for Iteratively Aligning Magnet Relative to Magnetic Sensors | |
| US11770322B1 (en) | Electronic circuit to communicate information as an electrical current on two wires such that the electrical current is stabilized by measuring a voltage on a transistor within the electronic circuit | |
| TW201719189A (zh) | 磁場感測裝置及其感測方法 | |
| US20140125328A1 (en) | Magnetic detection device | |
| SU1760374A1 (ru) | Устройство дл измерени температуры | |
| JPH05223573A (ja) | 電子方位計 | |
| CN116499513A (zh) | 传感器校准电路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| R11 | Change to the name of applicant or owner or transfer of ownership requested |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R11-ASN-PN2301 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| R14 | Transfer of ownership recorded |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R14-ASN-PN2301 (AS PROVIDED BY THE NATIONAL OFFICE) |