KR20170110637A - 다중 와이어 페이오프 시스템 용 장력 완충 시스템 - Google Patents
다중 와이어 페이오프 시스템 용 장력 완충 시스템 Download PDFInfo
- Publication number
- KR20170110637A KR20170110637A KR1020177023604A KR20177023604A KR20170110637A KR 20170110637 A KR20170110637 A KR 20170110637A KR 1020177023604 A KR1020177023604 A KR 1020177023604A KR 20177023604 A KR20177023604 A KR 20177023604A KR 20170110637 A KR20170110637 A KR 20170110637A
- Authority
- KR
- South Korea
- Prior art keywords
- pulley
- support
- reversing
- guide
- pulleys
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H59/00—Adjusting or controlling tension in filamentary material, e.g. for preventing snarling; Applications of tension indicators
- B65H59/10—Adjusting or controlling tension in filamentary material, e.g. for preventing snarling; Applications of tension indicators by devices acting on running material and not associated with supply or take-up devices
- B65H59/36—Floating elements compensating for irregularities in supply or take-up of material
-
- D—TEXTILES; PAPER
- D07—ROPES; CABLES OTHER THAN ELECTRIC
- D07B—ROPES OR CABLES IN GENERAL
- D07B7/00—Details of, or auxiliary devices incorporated in, rope- or cable-making machines; Auxiliary apparatus associated with such machines
- D07B7/02—Machine details; Auxiliary devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/30—Handled filamentary material
- B65H2701/35—Ropes, lines
- B65H2701/351—Ropes, lines in a manufacturing process
-
- D—TEXTILES; PAPER
- D07—ROPES; CABLES OTHER THAN ELECTRIC
- D07B—ROPES OR CABLES IN GENERAL
- D07B2207/00—Rope or cable making machines
- D07B2207/40—Machine components
- D07B2207/409—Drives
- D07B2207/4095—Control means therefor
-
- D—TEXTILES; PAPER
- D07—ROPES; CABLES OTHER THAN ELECTRIC
- D07B—ROPES OR CABLES IN GENERAL
- D07B2301/00—Controls
- D07B2301/25—System input signals, e.g. set points
- D07B2301/258—Tensile stress
Landscapes
- Tension Adjustment In Filamentary Materials (AREA)
- Devices For Conveying Motion By Means Of Endless Flexible Members (AREA)
- Ropes Or Cables (AREA)
Abstract
Description
도 1은 본 발명의 청구항 1에 따른 장력 완충 시스템을 개략적으로 도시한다.
도 2는 본 발명의 청구항 2에 따른 장력 완충 시스템을 개략적으로 도시한다.
도 3은 본 발명의 청구항 3에 따른 장력 완충 시스템을 개략적으로 도시한다.
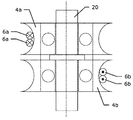
도 4는 동일한 중심을 갖는 안내 풀리들의 측면도를 개략적으로 도시한다.
도 5는 본 발명의 청구항 1에 따른 장력 완충 시스템에서 동일한 중심을 갖는 안내 풀리들을 사용하는 모드를 개략적으로 도시한다.
Claims (7)
- 다중 와이어 페이오프 시스템 용 장력 완충 시스템(2, 3, 5, 7)이며,
페이오프되는 와이어(6, 6a, 6b)를 안내하도록 구성된 안내 풀리(4, 4a, 4b), 및
와이어(6, 6a, 6b)를 안내 풀리(4, 4a, 4b)로부터, 그리고 다시 안내 풀리(4, 4a, 4b)로 안내하도록 각각 구성된, 역전 풀리(8)를 포함하고,
2개의 상기 역전 풀리(8)는 제 1 지지부(10) 상에 회전 가능하게 장착되고,
상기 제 1 지지부(10)는 상기 2개의 역전 풀리(8) 사이에 놓인 제 1 지지축(12)을 중심으로 피봇팅되며, 피봇팅은 상기 2개의 역전 풀리(8) 중 하나를 안내 풀리(4, 4a, 4b)로 더 가깝게 가져오고, 반면에 상기 2 개의 역전 풀리(8) 중 다른 하나를 상기 안내 풀리(4, 4a, 4b)로부터 더 멀어지게 하는,
장력 완충 시스템. - 제1항에 있어서,
제 2 지지부 및 또 하나의 역전 풀리를 더 포함하고,
상기 제 1 지지부 및 상기 또 하나의 역전 풀리는 상기 제 2 지지부 상에 회전 가능하게 장착되고,
상기 제 2 지지부는 상기 제 1 지지부와 상기 또 하나의 역전 풀리 사이에 놓인 제 2지지축을 중심으로 피봇팅되며, 피봇팅은 상기 제 1 지지부 상의 상기 역전 풀리 중 하나 또는 상기 또 하나의 역전 풀리를 안내 풀리에 더 가깝게 가져오고, 반면에 상기 제 1 지지부 상의 상기 역전 풀리 중 하나 또는 상기 또 하나의 역전 풀리 중 나머지 다른 역전 풀리를 상기 안내 풀리에서 더 멀어지게 하는,
장력 완충 시스템. - 제1항에 있어서,
제 2 지지부 및 2개의 역전 풀리가 장착된 또 하나의 제 1 지지부를 더 포함하고,
상기 2개의 제 1 지지부는 상기 제 2 지지부 상에 회전 가능하게 장착되고,
상기 제 2 지지부는 상기 2개의 제 1 지지부 사이에 놓인 제 2 지지축을 중심으로 피봇팅되며, 피봇팅은 상기 2개의 제 1 지지부 중 하나를 안내 풀리에 더 가깝게 가져오고, 반면에 상기 2개의 제 1 지지부 중 다른 하나를 안내 풀리에서 더 멀어지게 하는,
장력 완충 시스템. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 안내 풀리들은 동일한 중심을 갖는,
장력 완충 시스템. - 제1항 내지 제4항 중 어느 한 항에 있어서,
제 1 지지부 상의 역전 풀리의 중심과 제 1 지지축의 중심을 연결하는 2개의 선 사이의 안내 풀리를 향하는 쪽의 각도(A)는 180도 미만인,
장력 완충 시스템. - 제2항에 있어서,
제 1지지축의 중심과 제 2지지축의 중심을 연결하는 선과 상기 또 하나의 역전 풀리의 중심과 제 2지지축의 중심을 연결하는 선 사이의 안내 풀리를 향하는 쪽의 각도(B)는 180도 미만인,
장력 완충 시스템. - 제3항에 있어서,
제 1 지지축의 중심과 제 2 지지축의 중심을 연결하는 2 개의 선 사이의 안내 풀리를 향하는 쪽의 각도(C)는 180도 미만인,
장력 완충 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2015072533 | 2015-02-09 | ||
| CNPCT/CN2015/072533 | 2015-02-09 | ||
| PCT/EP2016/052472 WO2016128309A1 (en) | 2015-02-09 | 2016-02-05 | Tension buffer system for multi-wire pay-off system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170110637A true KR20170110637A (ko) | 2017-10-11 |
| KR102554589B1 KR102554589B1 (ko) | 2023-07-12 |
Family
ID=55315416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177023604A Active KR102554589B1 (ko) | 2015-02-09 | 2016-02-05 | 다중 와이어 페이오프 시스템 용 장력 완충 시스템 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US10647539B2 (ko) |
| EP (1) | EP3256639B1 (ko) |
| JP (1) | JP6442616B2 (ko) |
| KR (1) | KR102554589B1 (ko) |
| CN (2) | CN205529649U (ko) |
| BR (1) | BR112017015830B1 (ko) |
| EA (1) | EA032313B1 (ko) |
| ES (1) | ES2899789T3 (ko) |
| HU (1) | HUE056342T2 (ko) |
| MX (1) | MX385724B (ko) |
| WO (1) | WO2016128309A1 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102554589B1 (ko) * | 2015-02-09 | 2023-07-12 | 엔브이 베카에르트 에스에이 | 다중 와이어 페이오프 시스템 용 장력 완충 시스템 |
| DE102022102405A1 (de) * | 2022-02-02 | 2023-08-03 | Hartmann & König Stromzuführungs AG | Motor-leitungstrommelanordnung |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5078029A (ko) * | 1973-11-12 | 1975-06-25 | ||
| DE2949842A1 (de) * | 1979-02-27 | 1980-09-04 | Thaelmann Schwermaschbau Veb | Einrichtung und schaltungsanordnung zur festigkeitsmessung gegluehter draehte |
| US4663928A (en) * | 1984-09-28 | 1987-05-12 | Les Cables De Lyon | Machine for winding on a cable, with a very short pitch, at least one metal sheathing wire |
| JPH03200672A (ja) * | 1989-12-28 | 1991-09-02 | Kanai Hiroyuki | 線条体の繰出し方法およびその装置 |
| CN1875205A (zh) * | 2003-11-03 | 2006-12-06 | 贝卡尔特股份有限公司 | 低结构性伸长量的细钢丝帘线 |
| CN201193163Y (zh) * | 2008-03-27 | 2009-02-11 | 徐新基 | 动力放线机的张力控制改良装置 |
| CN203320326U (zh) * | 2013-06-19 | 2013-12-04 | 浙江奥通机械科技有限公司 | 一种捻股机 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE650723C (de) | 1937-10-01 | Furukawa Electric Co Ltd | Verfahren zum selbsttaetigen Ausgleich der Zugspannungen der Fernmeldekabeladern bei ihrer Parallellegung in einer Parallellegemaschine | |
| US2159635A (en) * | 1937-06-23 | 1939-05-23 | Percival K Ranney | Coil winding apparatus |
| US2417780A (en) * | 1944-10-28 | 1947-03-18 | Edward G Parvin | Reeling control mechanism |
| DE967171C (de) | 1954-08-27 | 1957-10-17 | Siemens Ag | Einrichtung zur automatischen Anzeige von Zugspannungsdifferenzen innerhalb eines Aderpaares bei der Herstellung von verdrillten Fernmeldekabeladergruppen, insbesondere Sternvierern |
| US2929569A (en) * | 1957-02-26 | 1960-03-22 | Western Electric Co | Continuous wire winding apparatus |
| CH387512A (de) | 1959-11-07 | 1965-01-31 | Mueller Franz Maschf | Kompensations-Fadenwächter zur Steuerung und Überwachung der Fäden an wenigstens zwei Fäden verarbeitenden Maschinen |
| US2995316A (en) * | 1960-06-07 | 1961-08-08 | Lees & Sons Co James | Yarn tensioning device for creels and the like |
| US3346019A (en) * | 1965-05-27 | 1967-10-10 | Western Electric Co | Material handling control systems |
| GB1163983A (en) * | 1967-03-28 | 1969-09-10 | Bekaert Pvba Leon | Improvements relating to the Winding of Strand Material |
| FR94512E (fr) * | 1967-06-01 | 1969-08-29 | Creusot Forges Ateliers | Dispositif automatique de compensation des variations de tension et de longueur des cables dans les appareils de transbordement de charges par cables entre deux mobiles. |
| US3565357A (en) * | 1968-01-31 | 1971-02-23 | Tokyo Shibaura Electric Co | Fine wire winding device |
| US3578795A (en) * | 1968-07-12 | 1971-05-18 | Utita Officine E Fonderie Di E | Cop winder with controlled yarn tension |
| US3934395A (en) * | 1974-12-19 | 1976-01-27 | Reynolds Metals Company | Cable stranding apparatus |
| JPS51130664A (en) * | 1975-05-08 | 1976-11-13 | Nippon Steel Corp | Band or linear material continuous treating device |
| JPS60154831A (ja) * | 1984-01-23 | 1985-08-14 | Sumitomo Electric Ind Ltd | 異形素線の撚線方法 |
| SU1567696A1 (ru) * | 1988-06-10 | 1990-05-30 | Институт Геотехнической Механики Ан Усср | Устройство дл обжати и выт жки витых изделий |
| US5169479A (en) * | 1991-04-18 | 1992-12-08 | Crompton & Knowles Corporation | Wire take-up apparatus with tape applicator for applying tape to terminal end portion of wire |
| JPH0578029A (ja) * | 1991-04-23 | 1993-03-30 | Murata Mach Ltd | 合糸機用テンサ― |
| US5657941A (en) * | 1993-07-14 | 1997-08-19 | Liberty Industries, Inc. | Web tensioning device |
| JP2794158B2 (ja) * | 1994-01-10 | 1998-09-03 | 株式会社島精機製作所 | 編機用糸切れ検出装置 |
| US20010002561A1 (en) * | 1994-09-30 | 2001-06-07 | Mitsuhiro Shiraga | Wire saw apparatus and method |
| US20040262444A1 (en) * | 2003-06-26 | 2004-12-30 | Martin Robitaille | Tape dispenser/package |
| US20080092510A1 (en) | 2006-10-20 | 2008-04-24 | I-Sheng Hsu | Tension control device of a triple twist pay-off system |
| CN101359815B (zh) * | 2008-10-07 | 2011-06-22 | 北京送变电公司 | 张力放线用滑车 |
| DE102009018914A1 (de) * | 2009-04-28 | 2010-11-18 | Otto Junker Gmbh | Vorrichtung zur Kompensation von Zugschwankungen und/oder zur Einstellung der Zugspannung an einem geförderten flexiblen Materialstrang |
| CN202969129U (zh) * | 2012-11-06 | 2013-06-05 | 日照市岚山合力绳缆有限公司 | 一种捻绳机的张力自调整装置 |
| KR102554589B1 (ko) * | 2015-02-09 | 2023-07-12 | 엔브이 베카에르트 에스에이 | 다중 와이어 페이오프 시스템 용 장력 완충 시스템 |
| EP3521223B1 (en) * | 2016-09-29 | 2023-07-26 | Proterial, Ltd. | Metal strip coil and method of manufacturing the same |
-
2016
- 2016-02-05 KR KR1020177023604A patent/KR102554589B1/ko active Active
- 2016-02-05 CN CN201620117542.1U patent/CN205529649U/zh not_active Expired - Lifetime
- 2016-02-05 US US15/549,290 patent/US10647539B2/en active Active
- 2016-02-05 CN CN201610082757.9A patent/CN105862479B/zh active Active
- 2016-02-05 WO PCT/EP2016/052472 patent/WO2016128309A1/en not_active Ceased
- 2016-02-05 ES ES16703522T patent/ES2899789T3/es active Active
- 2016-02-05 HU HUE16703522A patent/HUE056342T2/hu unknown
- 2016-02-05 MX MX2017010207A patent/MX385724B/es unknown
- 2016-02-05 BR BR112017015830-2A patent/BR112017015830B1/pt not_active IP Right Cessation
- 2016-02-05 JP JP2017541614A patent/JP6442616B2/ja not_active Expired - Fee Related
- 2016-02-05 EA EA201791797A patent/EA032313B1/ru not_active IP Right Cessation
- 2016-02-05 EP EP16703522.9A patent/EP3256639B1/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5078029A (ko) * | 1973-11-12 | 1975-06-25 | ||
| DE2949842A1 (de) * | 1979-02-27 | 1980-09-04 | Thaelmann Schwermaschbau Veb | Einrichtung und schaltungsanordnung zur festigkeitsmessung gegluehter draehte |
| US4663928A (en) * | 1984-09-28 | 1987-05-12 | Les Cables De Lyon | Machine for winding on a cable, with a very short pitch, at least one metal sheathing wire |
| JPH03200672A (ja) * | 1989-12-28 | 1991-09-02 | Kanai Hiroyuki | 線条体の繰出し方法およびその装置 |
| CN1875205A (zh) * | 2003-11-03 | 2006-12-06 | 贝卡尔特股份有限公司 | 低结构性伸长量的细钢丝帘线 |
| CN201193163Y (zh) * | 2008-03-27 | 2009-02-11 | 徐新基 | 动力放线机的张力控制改良装置 |
| CN203320326U (zh) * | 2013-06-19 | 2013-12-04 | 浙江奥通机械科技有限公司 | 一种捻股机 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3256639B1 (en) | 2021-09-15 |
| BR112017015830A2 (pt) | 2018-03-27 |
| CN105862479A (zh) | 2016-08-17 |
| MX385724B (es) | 2025-03-18 |
| KR102554589B1 (ko) | 2023-07-12 |
| EA032313B1 (ru) | 2019-05-31 |
| ES2899789T3 (es) | 2022-03-14 |
| MX2017010207A (es) | 2017-11-17 |
| EP3256639A1 (en) | 2017-12-20 |
| JP2018505827A (ja) | 2018-03-01 |
| EA201791797A1 (ru) | 2017-11-30 |
| BR112017015830B1 (pt) | 2022-02-22 |
| HUE056342T2 (hu) | 2022-02-28 |
| US20180022568A1 (en) | 2018-01-25 |
| CN105862479B (zh) | 2019-09-24 |
| JP6442616B2 (ja) | 2018-12-19 |
| US10647539B2 (en) | 2020-05-12 |
| WO2016128309A1 (en) | 2016-08-18 |
| CN205529649U (zh) | 2016-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20180126548A1 (en) | Arm structure and transferring apparatus | |
| US11192241B2 (en) | Variable gravitational torque compensation apparatus and control method therefor | |
| KR101011644B1 (ko) | 엘리베이터 | |
| JP2017095261A (ja) | 物品搬送設備 | |
| CN101415634B (zh) | 电梯绳索力的均衡装置以及电梯 | |
| CN104875908B (zh) | 一种可展机构绳驱动被动张紧装置 | |
| JP2017061368A (ja) | ロープテンション計測装置及びエレベーター装置並びにエレベーター装置のロープテンション計測方法 | |
| EP1486452A3 (fr) | Systeme de levage et de stabilisation d'un support de charge suspendu | |
| KR20170110637A (ko) | 다중 와이어 페이오프 시스템 용 장력 완충 시스템 | |
| JP4049468B2 (ja) | ケーブル送り装置およびケーブル敷設工法 | |
| JP5823196B2 (ja) | トラクション能力試験装置 | |
| JP2011240448A (ja) | ワイヤ駆動式ロボット | |
| WO2016132284A1 (en) | System for moving a platform and a useful load in space by using cables and drums arranged on the platform | |
| ES2659743T3 (es) | Regulador para controlar la velocidad de un objeto elevado en relación con un miembro de guiado | |
| CN105984773B (zh) | 用于检测多个电梯绳索的总载荷的绳索载荷检测装置 | |
| CN101489905B (zh) | 用于乘客运送系统的调速器装置 | |
| US11780713B2 (en) | Rope guiding device and a method for guiding a rope | |
| CN115893152A (zh) | 用于电梯系统承载构件的张紧的方法 | |
| CN205122288U (zh) | 一种用于线缆排线系统中的导线臂装置 | |
| CN104444063B (zh) | 具有夹紧装置的夹持输送机 | |
| US9988243B2 (en) | Elevator system | |
| RU2012135868A (ru) | Спускоподъемное устройство | |
| CN209507322U (zh) | 一种电缆生产线用的自调节张力轮组 | |
| KR20180013915A (ko) | 다수의 세장형 요소의 권취 | |
| US12139369B2 (en) | Smart beamforming for reliable and secure wireless data transmissions |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |