KR20170120574A - 출력 장치 및 출력 시스템 - Google Patents
출력 장치 및 출력 시스템 Download PDFInfo
- Publication number
- KR20170120574A KR20170120574A KR1020177020696A KR20177020696A KR20170120574A KR 20170120574 A KR20170120574 A KR 20170120574A KR 1020177020696 A KR1020177020696 A KR 1020177020696A KR 20177020696 A KR20177020696 A KR 20177020696A KR 20170120574 A KR20170120574 A KR 20170120574A
- Authority
- KR
- South Korea
- Prior art keywords
- rod
- operating rod
- guide
- output
- axial direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/007—Arms the end effector rotating around a fixed point
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
- B25J15/0416—Connections means having balls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
- B25J15/0425—Connections means having cams
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0491—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof comprising end-effector racks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/04—Arms extensible rotatable
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Description
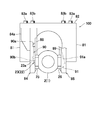
[도 2] 도 2A는, 상기 로봇 핸드 체인저의 고정 상태를 나타내며, 도 1A에 유사한 도면이다. 도 2B는, 도 1B에 유사한 도면이다.
[도 3] 도 3A 및 도 3B는, 각각, 클램프 대상물(툴 어댑터)이 재치된 본 발명의 일 실시 형태에 관계되는 스토커에, 도 1에 나타내는 출력 장치를 삽입한 상태를 나타내는 평면도 및 정면도이다.
[도 4] 도 4A는, 도 3A 중의 4A-4A선의 단면도에 상당하는 도면이고, 도 4B는, 도 3A 중의 4B-4B선의 단면도에 상당하는 도면이다. 어느 도면에 있어서도 출력 장치 및 클램프 대상물(툴 어댑터)의 도시를 생략하고 있다.
[도 5] 도 5는, 도 3에 나타내는 해제 상태로부터 출력 장치를 슬라이드 이동시키고 있었던 도중 상태를 나타내는 평면도이다.
[도 6] 도 6은, 본 발명의 제2 실시 형태의 출력 장치를 적용한 로봇 핸드 체인저를 나타내며, 도 1A에 유사한 도면이다.
21:출력 로드 22:조작 로드
23a:고정 조작부 24a:해제 조작부
35:안내 부재(핀 부재) 38:캠홈
40:구동홈 부분 51:결합 부재(결합 볼)
52:결합 오목부 52a:캠면
53:결합 부재 지지부(지지 구멍) 54:압압 부재
54a:배력면 55:스프링
70:툴 어댑터(클램프 대상물) 86, 87:재치대부
90, 91:가이드홈 90b, 91a:가이드면(테이퍼면)
100:스토커
Claims (4)
- 하우징(1) 내에 축심 방향으로 이동 가능하게 삽입되는 조작 로드(22)로서, 그 조작 로드(22)의 단부(端部)에 가해지는 상기 축심 방향으로의 외력으로, 상기 축심 방향으로 이동하는 조작 로드(22)와,
상기 하우징(1)과 상기 조작 로드(22) 사이에 설치되는 배력(倍力) 기구(5)로서, 상기 조작 로드(22)의 상기 축심 방향으로의 이동을 도와주는 배력(倍力) 기구(5)와,
상기 조작 로드(22)에 의해 상기 축심 방향 또는 상기 축심 방향과 교차하는 방향으로 이동하게 되는 출력 로드(21)를 구비하며,
상기 배력 기구(5)는,
결합 부재(51)와,
상기 조작 로드(22)의 외주(外周)에 형성된, 상기 결합 부재(51)가 끼워지는 결합 오목부(52)로서, 상기 결합 부재(51)가 결합하는 캠면(52a)을 가지는 결합 오목부(52)와,
상기 조작 로드(22)의 반경 방향으로의 상기 결합 부재(51)의 이동을 허용하지만 상기 조작 로드(22)의 축심 방향으로의 상기 결합 부재(51)의 이동을 제한하는 결합 부재 지지부(53)와,
스프링(55)에 의해 부세(付勢)됨으로써 상기 결합 부재(51)를 압압하는 압압(押壓) 부재(54)로서, 상기 결합 부재(51)가 결합하는 배력면(倍力面)(54a)을 가지는 압압 부재(54)를 가지는 것을 특징으로 하는, 출력 장치. - 청구항 1에 있어서,
상기 출력 로드(21)의 기단(基端)측 부분에 설치된 안내 부재(35)와,
상기 안내 부재(35)에 직접 또는 간접적으로 결합되도록 상기 조작 로드(22)에 마련된 캠홈(38)으로서, 상기 조작 로드(22)의 축심 방향의 양단 중 어느 하나의 일단으로 향함에 따라 해당 축심으로부터 멀어지는 구동홈 부분(40)을 가지는 캠홈(38)을 구비하는 것을 특징으로 하는, 출력 장치. - 청구항 1 또는 2의 출력 장치와,
상기 조작 로드(22)를 상기 축심 방향으로 이동시키기 위한 가이드면(90b, 91a)을 가지는 스토커(100)를 구비하며,
상기 스토커(100)는,
상기 출력 장치로 클램프되는 클램프 대상물(70)이 재치(載置)되는 재치대부(86, 87)와,
테이퍼 형상의 상기 가이드면(90b, 91a)이 내면에 마련된 가이드홈(90, 91)으로서, 상기 조작 로드(22)의 단부의 안내부가 되는 가이드홈(90, 91)을 갖고 있으며,
상기 하우징(1)으로부터 돌출하는 상기 조작 로드(22)의 단부를 상기 가이드홈(90, 91)에 통과시킴으로써 테이퍼 형상의 상기 가이드면(90b, 91a)에 접촉시켜 상기 조작 로드(22)를 상기 축심 방향으로 이동시키는 것을 특징으로 하는, 출력 시스템. - 청구항 3에 있어서,
상기 조작 로드(22)의 한쪽 단부인 고정 조작부(23a)와, 다른쪽 단부인 해제 조작부(24a)의 크기가 다르고,
상기 가이드홈(90, 91)은, 상기 고정 조작부(23a)에 대응하는 고정 가이드홈(90)과, 상기 해제 조작부(24a)에 대응하는 해제 가이드홈(91)으로 구성되는 것을 특징으로 하는, 출력 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015038069A JP6353796B2 (ja) | 2015-02-27 | 2015-02-27 | 出力装置および出力システム |
| JPJP-P-2015-038069 | 2015-02-27 | ||
| PCT/JP2016/055475 WO2016136821A1 (ja) | 2015-02-27 | 2016-02-24 | 出力装置および出力システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170120574A true KR20170120574A (ko) | 2017-10-31 |
| KR102282819B1 KR102282819B1 (ko) | 2021-07-27 |
Family
ID=56788755
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177020696A Expired - Fee Related KR102282819B1 (ko) | 2015-02-27 | 2016-02-24 | 출력 장치 및 출력 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10166685B2 (ko) |
| EP (1) | EP3263294B1 (ko) |
| JP (1) | JP6353796B2 (ko) |
| KR (1) | KR102282819B1 (ko) |
| CN (1) | CN107405773B (ko) |
| WO (1) | WO2016136821A1 (ko) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITUB20155846A1 (it) * | 2015-11-24 | 2017-05-24 | Gimatic S R L | Dispositivo cambia utensile |
| US11568920B2 (en) | 2017-08-02 | 2023-01-31 | Samsung Electronics Co., Ltd. | Dual row-column major dram |
| US11584023B2 (en) * | 2018-08-21 | 2023-02-21 | William George Bolton | Separable robotic interface |
| JP7127836B2 (ja) * | 2019-02-13 | 2022-08-30 | 株式会社コスメック | 工具交換装置 |
| JP7217946B2 (ja) * | 2019-05-08 | 2023-02-06 | 株式会社コスメック | 部材交換装置 |
| JP6762592B1 (ja) * | 2019-12-20 | 2020-09-30 | リバーフィールド株式会社 | 医療用ロボットおよび医療用ロボットの装着部 |
| CN111940820B (zh) * | 2020-08-07 | 2021-08-24 | 国网江苏省电力有限公司常州供电分公司 | 便于更换锁定的通用通讯接口 |
| JP7608959B2 (ja) * | 2021-04-22 | 2025-01-07 | Smc株式会社 | エンドエフェクタ交換装置 |
| EP4215319A1 (de) * | 2022-01-19 | 2023-07-26 | Schunk GmbH & Co. KG Spann- und Greiftechnik | Automatisch und manuell betätigbares backenwechselsystem |
| JP2024046792A (ja) * | 2022-09-26 | 2024-04-05 | 株式会社コスメック | クランプ装置 |
| JP2024048226A (ja) * | 2022-09-27 | 2024-04-08 | 株式会社コスメック | 部材交換装置 |
| WO2024099989A1 (en) * | 2022-11-09 | 2024-05-16 | Norgren Automation Solutions, Llc | Adapter-receiver assembly for a tooling arm |
| WO2025239194A1 (ja) * | 2024-05-17 | 2025-11-20 | 株式会社コスメック | クランプシステム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20030040104A (ko) * | 2001-11-13 | 2003-05-22 | 가부시키가이샤 코스멕 | 선회식 클램프 |
| JP2010105111A (ja) | 2008-10-29 | 2010-05-13 | Nabeya Co Ltd | 締結装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05169383A (ja) * | 1991-12-24 | 1993-07-09 | Nitta Ind Corp | 自動工具交換用カップラーの脱落防止機構 |
| US5649956A (en) * | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| US5814038A (en) * | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| JP4146922B2 (ja) * | 1996-12-02 | 2008-09-10 | システム・3アル・インテルナショナール・アクチボラグ | クランプシステム |
| JP2000108092A (ja) * | 1998-10-05 | 2000-04-18 | Press Center:Kk | プレス用パンチリテーナー装置 |
| JP2000317541A (ja) * | 1999-05-13 | 2000-11-21 | Amada Co Ltd | 加工機のセンターロケートピン装置 |
| CN1486403A (zh) * | 2001-12-14 | 2004-03-31 | ������������ʽ���� | 推力变换装置 |
| JP3868873B2 (ja) * | 2002-09-18 | 2007-01-17 | ニッタ株式会社 | 着脱機構 |
| US20090160106A1 (en) * | 2004-10-12 | 2009-06-25 | Efficient Manufacturing System Integration | Apparatus and method for simultaneous usage of multiple die casting tools |
| CN2778444Y (zh) * | 2004-10-14 | 2006-05-10 | 陈月辉 | 快速安全连接机构 |
| US8366592B2 (en) * | 2007-11-30 | 2013-02-05 | Cinetic Automation Corp. | Quick change spindle |
| JP5593866B2 (ja) * | 2010-06-11 | 2014-09-24 | 富士通株式会社 | ツール交換機構 |
| JP4945681B1 (ja) * | 2010-11-24 | 2012-06-06 | 株式会社コスメック | 倍力機構付きシリンダ装置 |
| JP5238845B2 (ja) * | 2011-03-31 | 2013-07-17 | 通則 竹元 | スライドコア装置 |
| JP5631816B2 (ja) * | 2011-07-06 | 2014-11-26 | 株式会社神戸製鋼所 | 溶接用チップ交換装置、溶接用チップ交換システムおよび溶接用チップ交換方法 |
| JP5390047B1 (ja) * | 2012-02-16 | 2014-01-15 | 株式会社コスメック | 倍力機構付きシリンダ装置 |
| TWI508831B (zh) * | 2013-01-28 | 2015-11-21 | Prec Machinery Res & Dev Ct | A joint device for a parallel robot |
| US9981391B2 (en) * | 2015-02-16 | 2018-05-29 | Norgren Automation Solutions, Llc | Quick disconnect apparatus for modular tooling |
| JP6467040B2 (ja) * | 2015-02-16 | 2019-02-06 | ノルグレン オートメーション ソーリューションズ エルエルシーNorgren Automation Solutions,Llc. | モジュラー工作機械器具受容器 |
-
2015
- 2015-02-27 JP JP2015038069A patent/JP6353796B2/ja active Active
-
2016
- 2016-02-24 EP EP16755565.5A patent/EP3263294B1/en active Active
- 2016-02-24 KR KR1020177020696A patent/KR102282819B1/ko not_active Expired - Fee Related
- 2016-02-24 US US15/544,137 patent/US10166685B2/en active Active
- 2016-02-24 CN CN201680011815.7A patent/CN107405773B/zh not_active Expired - Fee Related
- 2016-02-24 WO PCT/JP2016/055475 patent/WO2016136821A1/ja not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20030040104A (ko) * | 2001-11-13 | 2003-05-22 | 가부시키가이샤 코스멕 | 선회식 클램프 |
| JP2010105111A (ja) | 2008-10-29 | 2010-05-13 | Nabeya Co Ltd | 締結装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107405773A (zh) | 2017-11-28 |
| EP3263294A1 (en) | 2018-01-03 |
| CN107405773B (zh) | 2020-04-07 |
| KR102282819B1 (ko) | 2021-07-27 |
| US10166685B2 (en) | 2019-01-01 |
| JP2016159377A (ja) | 2016-09-05 |
| EP3263294B1 (en) | 2019-04-24 |
| JP6353796B2 (ja) | 2018-07-04 |
| EP3263294A4 (en) | 2018-10-17 |
| WO2016136821A1 (ja) | 2016-09-01 |
| US20170348860A1 (en) | 2017-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170120574A (ko) | 출력 장치 및 출력 시스템 | |
| US9908219B2 (en) | Clamp apparatus | |
| CN104908050B (zh) | 用于操纵器的联接装置 | |
| JP2922328B2 (ja) | 直線移動ユニット用係止装置 | |
| CN108698180B (zh) | 具有举起功能的夹紧装置 | |
| US4135848A (en) | Toolholder clamp for machine tools | |
| KR101083486B1 (ko) | 위치결정장치 및 이를 구비한 클램핑 시스템 | |
| JP5127634B2 (ja) | 位置決め部保持装置、及びこれを用いたワーク位置決め方法 | |
| JP4951406B2 (ja) | 位置決めクランプ装置 | |
| JP6060042B2 (ja) | 複数ワークのクランプ構造 | |
| US11260482B2 (en) | Flexible ring fitting device | |
| CN116633095A (zh) | 电机转子轴承压装方法及装置 | |
| KR20180025695A (ko) | 풀다운 척의 공작물 클램핑장치 | |
| JP3662740B2 (ja) | ピストンピンクリップ装着装置 | |
| US11117230B2 (en) | Flexible ring fitting device | |
| CN223223238U (zh) | 可预定位的盖板夹具 | |
| CN117139820B (zh) | 一种用于球笼总成的定位夹紧装置及装配方法 | |
| CN111012392A (zh) | 一种手术器械固定装置的自动配合结构 | |
| JP2005046954A (ja) | リング組み付け装置 | |
| CN218363333U (zh) | 一种预夹紧装置、工装夹具及加工中心 | |
| JPH0448896Y2 (ko) | ||
| TWI444252B (zh) | 組裝機構及其組裝方法 | |
| JP5497869B2 (ja) | クリップ取付装置 | |
| JPH0735691Y2 (ja) | クランクシャフト加工用保持装置 | |
| JP6897963B2 (ja) | 固定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20240723 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20240723 |