KR20180064430A - 태양 패널을 위한 피봇 및 부채꼴 전개 구동기 - Google Patents
태양 패널을 위한 피봇 및 부채꼴 전개 구동기 Download PDFInfo
- Publication number
- KR20180064430A KR20180064430A KR1020187011611A KR20187011611A KR20180064430A KR 20180064430 A KR20180064430 A KR 20180064430A KR 1020187011611 A KR1020187011611 A KR 1020187011611A KR 20187011611 A KR20187011611 A KR 20187011611A KR 20180064430 A KR20180064430 A KR 20180064430A
- Authority
- KR
- South Korea
- Prior art keywords
- axis
- rotary table
- rotary
- sector
- brake
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F16M11/12—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting in more than one direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M13/00—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles
- F16M13/02—Other supports for positioning apparatus or articles; Means for steadying hand-held apparatus or articles for supporting on, or attaching to, an object, e.g. tree, gate, window-frame, cycle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S30/00—Arrangements for moving or orienting solar heat collector modules
- F24S30/40—Arrangements for moving or orienting solar heat collector modules for rotary movement
- F24S30/45—Arrangements for moving or orienting solar heat collector modules for rotary movement with two rotation axes
- F24S30/452—Vertical primary axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S30/00—Arrangements for moving or orienting solar heat collector modules
- F24S30/40—Arrangements for moving or orienting solar heat collector modules for rotary movement
- F24S30/48—Arrangements for moving or orienting solar heat collector modules for rotary movement with three or more rotation axes or with multiple degrees of freedom
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
- H02K7/1163—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion
- H02K7/1166—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion comprising worm and worm-wheel
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S20/00—Supporting structures for PV modules
- H02S20/30—Supporting structures being movable or adjustable, e.g. for angle adjustment
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S20/00—Supporting structures for PV modules
- H02S20/30—Supporting structures being movable or adjustable, e.g. for angle adjustment
- H02S20/32—Supporting structures being movable or adjustable, e.g. for angle adjustment specially adapted for solar tracking
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S30/00—Structural details of PV modules other than those related to light conversion
- H02S30/20—Collapsible or foldable PV modules
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S20/00—Solar heat collectors specially adapted for particular uses or environments
- F24S20/50—Rollable or foldable solar heat collector modules
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S30/00—Arrangements for moving or orienting solar heat collector modules
- F24S2030/10—Special components
- F24S2030/11—Driving means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S30/00—Arrangements for moving or orienting solar heat collector modules
- F24S2030/10—Special components
- F24S2030/13—Transmissions
- F24S2030/134—Transmissions in the form of gearings or rack-and-pinion transmissions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24S—SOLAR HEAT COLLECTORS; SOLAR HEAT SYSTEMS
- F24S30/00—Arrangements for moving or orienting solar heat collector modules
- F24S2030/10—Special components
- F24S2030/19—Movement dampening means; Braking means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
- H01Q1/1235—Collapsible supports; Means for erecting a rigid antenna
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
- H01Q1/125—Means for positioning
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S10/00—PV power plants; Combinations of PV energy systems with other systems for the generation of electric power
- H02S10/40—Mobile PV generator systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/40—Solar thermal energy, e.g. solar towers
- Y02E10/47—Mountings or tracking
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Thermal Sciences (AREA)
- Physics & Mathematics (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Photovoltaic Devices (AREA)
- Transmission Devices (AREA)
- Specific Sealing Or Ventilating Devices For Doors And Windows (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
- Braking Arrangements (AREA)
Abstract
Description
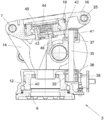
도 3 및 4는 2개의 서로 다른 작동 위치에 있는, 도 1 및 2의 태양 모듈을 위한 본 발명에 따른 피봇 및 부채꼴 전개 장치를 상방에서 비스듬히 본 사시도(도 3) 및 하방에서 비스듬히 본 사시도(도 4)로 나타낸 것이다.
도 5 내지 7은 도 3 및 4의 피봇 및 부채꼴 전개 구동기를 측면도(도 5), 평면도(도 6) 및 배면도(도 7)로 나타낸 것이다.
도 8 내지 11은 도 3 내지 7의 피봇 및 부채꼴 전개 구동기의 대안적인 실시 형태에 대한 2가지 변형예를 2개의 서로 다른 작동 위치에서 단면도로 나타낸 것이다.
Claims (18)
- 태양 패널(2)을 위한 피봇 및 부채꼴 전개(fanning) 구동기(3)로서,
하측 지지부(9),
실질적으로 수직인 제 1 축선(6) 주위로 회전 가능하게 상기 하측 지지부(9)에 장착되는 회전 테이블(12),
실질적으로 수평인 제 2 축선(7) 주위로 회전 가능하게 상기 회전 테이블(12)에 장착되는 회전판(16), 및
제 3 축선(5) 주위로 회전 가능하게 상기 회전판(16)에 장착되는 부채꼴 전개 축(18)을 가지며,
상기 부채꼴 전개 축에는, 태양 패널(2)이 상기 제 3 축선(5) 주위로 접히고 부채꼴 전개될 수 있도록 장착될 수 있고,
상기 회전판(16)의 일 단부(15)는 상기 제 2 축선(7) 주위에서 상기 회전 테이블(12)에 장착되어 있고, 적어도 하나의 크랭크(20)가 상기 제 2 축선으로부터 떨어져서 상기 회전 테이블에 장착되어 있으며, 상기 크랭크는 연결 로드(23)에 의해 회전판(16)의 다른 단부(24)에 연결되어 크랭크-로커 링크를 형성하는, 피봇 및 부채꼴 전개 구동기. - 제 1 항에 있어서,
상기 크랭크(20)의 장착 축선(21')은 상기 회전 테이블(16)에서 상기 제 2 축선(7) 보다 낮게 있는, 피봇 및 부채꼴 전개 구동기. - 제 1 항 또는 제 2 항에 있어서,
상기 회전 테이블(12)은 상방으로 돌출해 있는 2개의 베어링 아암(14)을 가지며, 상기 베어링 아암 사이에 상기 회전판(16)의 상기 일 단부(15)가 장착되어 있는, 피봇 및 부채꼴 전개 구동기. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 2개의 크랭크(20) 각각에는 하나의 연결 로드(23)가 제공되어 있고, 상기 연결 로드 사이에 상기 회전판(16)의 상기 다른 단부(24)가 장착되어 있는, 피봇 및 부채꼴 전개 구동기. - 제 4 항에 있어서,
상기 크랭크(20)는 상기 회전 테이블(12)의 베어링 탭(tab)(22)에 장착되는 공통 축(21)에 배치되는, 피봇 및 부채꼴 전개 구동기. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 회전 테이블(12)은, 베어링 아암(14) 및 베어링 탭(22)이 제공되어 있는 경우 이들과 함께, 바람직하게는 주물로서 단일체로 제조되는, 피봇 및 부채꼴 전개 구동기. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서
상기 크랭크(20)는 상기 회전 테이블(12)에 장착되어 있는 제 1 전기 모터(26, 27)에 의해 제 1 웜 기어(28)를 통해 구동되는, 피봇 및 부채꼴 전개 구동기. - 제 1 항 내지 제 7 항 중 어느 한 항에 있어서,
상기 회전 테이블(12)은 상기 하측 지지부(9)에 장착되어 있는 제 2 전기 모터(29, 30)에 의해 제 2 웜 기어(31)를 통해 구동되는, 피봇 및 부채꼴 전개 구동기. - 제 1 항 내지 제 8 항 중 어느 한 항에 있어서,
상기 부채꼴 전개 축(18)은 상기 회전판(16)에 장착되어 있는 제 3 전기 모터(32, 33)에 의해 제 3 웜 기어(34)를 통해 구동되는, 피봇 및 부채꼴 전개 구동기. - 제 1 항 내지 제 8 항 중 어느 한 항에 있어서,
상기 부채꼴 전개 축(18)은 상기 회전판(16) 또는 회전판의 구동기(26 - 28)에 의해 커플링을 통해 구동될 수 있는, 피봇 및 부채꼴 전개 구동기. - 제 1 항 내지 제 8 항 중 어느 한 항에 있어서,
상기 부채꼴 전개 축(18)은 상기 회전 테이블(12) 또는 회전 테이블의 구동기(29 - 31)에 의해 커플링(41, 42)을 통해 구동될 수 있는, 피봇 및 부채꼴 전개 구동기. - 제 11 항에 있어서,
상기 커플링(41, 42)은 상기 회전판(16)의 회전으로 작동되는, 피봇 및 부채꼴 전개 구동기. - 제 12 항에 있어서,
상기 커플링(41, 42)은 상기 회전판(16)의 휴지(rest) 위치에서 폐쇄되고, 또한 휴지 위치에서 벗어난 회전판(16)의 회전 위치에서는 개방되는, 피봇 및 부채꼴 전개 구동기. - 제 13 항에 있어서,
상기 커플링(41, 42)은, 상기 회전 테이블(12)에 의해 기어축(35)을 통해 구동되는 피니언(41), 및 상기 부채꼴 전개 축(18)에 배치되어 있는 기어 림(42)으로 형성되어 있고, 상기 회전판(16)이 상기 휴지 위치로 회전됨에 따라 상기 기어 림은 상기 피니언(41)과 맞물리고 또한 상기 회전판(16)이 상기 휴지 위치로부터 벗어나게 회전됨에 따라 상기 피니언과의 맞물림에서 해제되는, 피봇 및 부채꼴 전개 구동기. - 제 10 항 내지 제 14 항 중 어느 한 항에 있어서,
상기 부채꼴 전개 축(18)은 추가 커플링(43 - 49)에 의해 상기 회전판(16)에 대해 회전 고정될 수 있는, 피봇 및 부채꼴 전개 구동기. - 제 15 항에 있어서,
상기 추가 커플링(43 - 49)은 상기 회전판(16)의 휴지 위치에서 개방되고 또한 상기 휴지 위치로부터 벗어난 회전판(16)의 회전 위치에서는 폐쇄되는, 피봇 및 부채꼴 전개 구동기. - 제 16 항에 있어서,
상기 추가 커플링은 브레이크 디스크(45)이고, 상기 브레이크 디스크는 상기 부채꼴 전개 축(18)으로 회전 고정되고 스프링 하중을 받아 상기 회전판(16)의 브레이크 표면(43)에 접하게 되며, 회전판(16)이 휴지 위치로 회전됨에 따라, 상기 브레이크 디스크는 상기 회전 테이블(12)의 작동 부재(46)에 의해 상기 브레이크 표면(43)으로부터 떨어질 수 있는, 피봇 및 부채꼴 전개 구동기. - 제 14 항과 함께 제 16 항에 있어서,
상기 추가 커플링은 스프링 하중을 받는 브레이크 피니언(47)이고, 상기 브레이크 피니언은 상기 회전판(16)에서 회전 고정되지만 축방향으로 움직일 수 있고, 상기 브레이크 피니언은 상기 기어 림(42)과 맞물리는 브레이크 치부(48)를 가지며, 상기 회전판(16)이 상기 휴지 위치로 회전함에 따라 상기 브레이크 피니언은 스프링 하중에 대항하여 눌려져 기어 림과의 맞물림에서 해제되는, 피봇 및 부채꼴 전개 구동기.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ATA50840/2015A AT517705B1 (de) | 2015-10-02 | 2015-10-02 | Schwenk- und Fächerantrieb für Solarpaneele |
| ATA50840/2015 | 2015-10-02 | ||
| PCT/AT2016/060067 WO2017054026A1 (de) | 2015-10-02 | 2016-09-20 | Schwenk- und fächerantrieb für solarpaneele |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180064430A true KR20180064430A (ko) | 2018-06-14 |
| KR102709747B1 KR102709747B1 (ko) | 2024-09-24 |
Family
ID=57256007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187011611A Active KR102709747B1 (ko) | 2015-10-02 | 2016-09-20 | 태양 패널을 위한 피봇 및 부채꼴 전개 구동기 |
Country Status (21)
| Country | Link |
|---|---|
| US (2) | US10298173B2 (ko) |
| EP (5) | EP3691117A1 (ko) |
| JP (2) | JP6885932B2 (ko) |
| KR (1) | KR102709747B1 (ko) |
| CN (2) | CN111726059B (ko) |
| AT (1) | AT517705B1 (ko) |
| AU (2) | AU2016333140B2 (ko) |
| CL (1) | CL2018000826A1 (ko) |
| DK (1) | DK3357157T3 (ko) |
| ES (3) | ES3057857T3 (ko) |
| HR (1) | HRP20251537T1 (ko) |
| IL (2) | IL258388B (ko) |
| MX (2) | MX2018003917A (ko) |
| PH (1) | PH12018500728A1 (ko) |
| PL (1) | PL3716471T4 (ko) |
| PT (1) | PT3357157T (ko) |
| RS (1) | RS67495B1 (ko) |
| SG (2) | SG10201912476SA (ko) |
| SM (1) | SMT202500485T1 (ko) |
| WO (1) | WO2017054026A1 (ko) |
| ZA (1) | ZA201802077B (ko) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT517705B1 (de) * | 2015-10-02 | 2017-04-15 | Smart Flower Energy Tech Gmbh | Schwenk- und Fächerantrieb für Solarpaneele |
| CN109194269B (zh) * | 2018-10-23 | 2023-10-17 | 西南交通大学 | 一种折叠扇形板的机构 |
| USD909960S1 (en) * | 2018-11-14 | 2021-02-09 | Alexander Swatek | Solar power module |
| CO2018014418A1 (es) * | 2018-12-31 | 2019-01-18 | Arbulu Saavedra Mario Ricardo | Sistema desplegable de paneles solares con mecanismo posicionador para captar la luz solar |
| DE102019003279B4 (de) * | 2019-05-08 | 2021-10-14 | Mbda Deutschland Gmbh | Vorrichtung zum Schwenken eines kippbaren Mastes, Teleskopmastanordnung, Verfahren zum Aufrichten und Verfahren zum Ablegen eines Teleskopmastes |
| MA46073A1 (fr) * | 2019-06-04 | 2020-12-31 | Jilali Toumi | Dispositif porte plaques solaires pour voitures |
| CH717565A1 (fr) * | 2020-06-25 | 2021-12-30 | Planair Sa | Installation photovoltaïque et procédé de construction d'une telle installation. |
| USD1011272S1 (en) * | 2020-07-28 | 2024-01-16 | Palm Energy Systems Llc | Solar collector pillar |
| CN112152556B (zh) * | 2020-08-12 | 2024-09-13 | 常熟理工学院 | 家用自动折叠太阳能面板 |
| US11987976B2 (en) * | 2021-11-10 | 2024-05-21 | Khaled Elbehiery | Rotating building assembly |
| CN114759871A (zh) * | 2022-04-06 | 2022-07-15 | 同辉电子科技股份有限公司 | 一种基于风速监测的太阳能板折叠机构 |
| CN115027306B (zh) * | 2022-07-30 | 2025-08-15 | 山东鼎盛电气设备有限公司 | 一种露天停车场智能太阳能充电桩 |
| TWI833348B (zh) * | 2022-09-12 | 2024-02-21 | 賴彥光 | 樹狀太陽能集電柱及集電系統 |
| USD1073591S1 (en) * | 2023-01-18 | 2025-05-06 | Xiamen Topunive Technology Co., Ltd. | Solar charging pile |
| DE102023124473A1 (de) * | 2023-09-11 | 2025-03-13 | Auma Riester Gmbh & Co. Kg | Stellantrieb und Baugruppe |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090037100A (ko) * | 2007-10-11 | 2009-04-15 | 박태선 | 태양광 발전 트래커 |
| WO2011134004A1 (en) * | 2010-04-27 | 2011-11-03 | Upton Ecoforlife Solar Trackers Pty. Ltd. | Solar tracking system |
| WO2012073705A1 (ja) * | 2010-11-30 | 2012-06-07 | 株式会社Sp電機 | 太陽光発電装置 |
| JP2013529849A (ja) * | 2010-06-29 | 2013-07-22 | スマート フラワー エナジー テクノロジー ゲゼルシャフト ミット ベシュレンクテル ハフツング | 折り畳み式のソーラーモジュール |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE684729A (ko) * | 1966-11-10 | 1967-01-03 | ||
| ES473356A1 (es) | 1978-09-14 | 1979-11-01 | Sener Ing & Sist | Perfeccionamientos en heliostatos |
| DE3131612A1 (de) | 1981-08-10 | 1983-02-24 | Zahnräderfabrik Renk AG, 8900 Augsburg | Getriebe zur positionierung von sonnenenergie-kollektoren |
| US4552438A (en) * | 1984-01-09 | 1985-11-12 | The United States Of America As Represented By The United States Department Of Energy | Cable tensioned membrane solar collector module with variable tension control |
| US5517204A (en) * | 1992-03-10 | 1996-05-14 | Tokimec Inc. | Antenna directing apparatus |
| JP2002081760A (ja) | 2000-09-08 | 2002-03-22 | Mitsui Eng & Shipbuild Co Ltd | 太陽エネルギー利用システム |
| DE20200609U1 (de) * | 2002-01-16 | 2003-06-05 | Robert Bosch Gmbh, 70469 Stuttgart | Mobile Solar-Akku-Ladestation |
| EP2019936B1 (de) | 2006-05-24 | 2010-04-21 | Flender Tübingen GmbH | Zweiachsantriebsanordnung |
| US8381718B1 (en) * | 2006-10-20 | 2013-02-26 | Idealab | Actuator for controlling rotation about two axes using a single motor |
| US7878192B2 (en) * | 2006-11-22 | 2011-02-01 | Theodore Edward Larsen | Adjustable solar collector and method of use |
| KR100891500B1 (ko) | 2007-09-11 | 2009-04-06 | 성재욱 | 무인 자동설비용 금형장치 |
| US9214892B2 (en) * | 2007-11-21 | 2015-12-15 | Orbital Atk, Inc. | Solar arrays |
| US8168883B2 (en) * | 2008-05-29 | 2012-05-01 | Moses Clark | Adjustable solar powerer |
| WO2010039999A2 (en) * | 2008-10-01 | 2010-04-08 | Steven Polk | Solar collector |
| GB2469344B (en) * | 2009-07-23 | 2011-08-24 | Iain Chapman | Moveable mounting |
| US8168931B1 (en) * | 2009-12-09 | 2012-05-01 | Concrete Systems, Inc. | Solar tracking device |
| KR101187925B1 (ko) * | 2010-04-06 | 2012-10-05 | 박용우 | 한 개의 모터로 2축 구동이 가능한 태양광발전용 추적시스템 |
| US20110277748A1 (en) * | 2010-05-12 | 2011-11-17 | Raymond Chu | Closable Solar Collector |
| MA34337B1 (fr) * | 2011-02-22 | 2013-06-01 | Sunpower Corp | Entrainement de suiveur solaire |
| US9443999B2 (en) * | 2011-04-07 | 2016-09-13 | Steven Polk | Solar energy collector |
| US20120285506A1 (en) * | 2011-05-13 | 2012-11-15 | Chieh-Hsing Kuo | Solar Tracker |
| JP6040242B2 (ja) * | 2011-08-15 | 2016-12-07 | モーガン ソーラー インコーポレーテッド | 自己安定型の太陽光追尾装置 |
| DE102012021106A1 (de) * | 2012-02-17 | 2013-08-22 | Heidelberger Druckmaschinen Ag | Vorrichtung für den Einsatz in Systemen zur Nutzung von Solarenergie |
| AT512680B1 (de) | 2012-04-02 | 2014-05-15 | Smart Flower Energy Technology Gmbh | Solarmodul |
| KR101304647B1 (ko) * | 2012-11-24 | 2013-09-06 | 류지연 | 태양추적장치 및 그 운영방법 |
| AT513875B1 (de) * | 2013-01-23 | 2015-01-15 | Smart Flower Energy Technology Gmbh | Solarmodul |
| FR3011149B1 (fr) * | 2013-09-26 | 2019-03-15 | Servitronique | Dispositif de reglage a 2 axes d'une partie d'installation en particulier d'un ou plusieurs panneaux solaires |
| CN104156005B (zh) * | 2014-08-07 | 2017-10-24 | 福建农林大学 | 一种太阳能追光装置 |
| CN104539230A (zh) * | 2014-12-26 | 2015-04-22 | 金海新源电气江苏有限公司 | 一种光伏太阳能旋转支架 |
| AT517705B1 (de) | 2015-10-02 | 2017-04-15 | Smart Flower Energy Tech Gmbh | Schwenk- und Fächerantrieb für Solarpaneele |
-
2015
- 2015-10-02 AT ATA50840/2015A patent/AT517705B1/de active
-
2016
- 2016-09-20 EP EP20164839.1A patent/EP3691117A1/de not_active Withdrawn
- 2016-09-20 EP EP16793730.9A patent/EP3357157B1/de active Active
- 2016-09-20 SG SG10201912476SA patent/SG10201912476SA/en unknown
- 2016-09-20 US US15/764,365 patent/US10298173B2/en active Active
- 2016-09-20 ES ES20164840T patent/ES3057857T3/es active Active
- 2016-09-20 AU AU2016333140A patent/AU2016333140B2/en active Active
- 2016-09-20 PT PT167937309T patent/PT3357157T/pt unknown
- 2016-09-20 HR HRP20251537TT patent/HRP20251537T1/hr unknown
- 2016-09-20 JP JP2018517205A patent/JP6885932B2/ja active Active
- 2016-09-20 CN CN202010499948.1A patent/CN111726059B/zh active Active
- 2016-09-20 PL PL20164840.9T patent/PL3716471T4/pl unknown
- 2016-09-20 CN CN201680062887.4A patent/CN108391461B/zh active Active
- 2016-09-20 SM SM20250485T patent/SMT202500485T1/it unknown
- 2016-09-20 KR KR1020187011611A patent/KR102709747B1/ko active Active
- 2016-09-20 DK DK16793730.9T patent/DK3357157T3/da active
- 2016-09-20 EP EP20164840.9A patent/EP3716471B1/de active Active
- 2016-09-20 WO PCT/AT2016/060067 patent/WO2017054026A1/de not_active Ceased
- 2016-09-20 MX MX2018003917A patent/MX2018003917A/es unknown
- 2016-09-20 RS RS20251246A patent/RS67495B1/sr unknown
- 2016-09-20 ES ES16793730T patent/ES2811324T3/es active Active
- 2016-09-20 SG SG11201802664SA patent/SG11201802664SA/en unknown
- 2016-09-20 ES ES20164842T patent/ES3009007T3/es active Active
- 2016-09-20 EP EP20164842.5A patent/EP3691118B1/de active Active
- 2016-09-20 EP EP20164837.5A patent/EP3691116A1/de not_active Withdrawn
-
2018
- 2018-03-27 IL IL258388A patent/IL258388B/en unknown
- 2018-03-28 ZA ZA2018/02077A patent/ZA201802077B/en unknown
- 2018-03-28 MX MX2023003907A patent/MX2023003907A/es unknown
- 2018-03-29 CL CL2018000826A patent/CL2018000826A1/es unknown
- 2018-04-02 PH PH12018500728A patent/PH12018500728A1/en unknown
-
2019
- 2019-02-13 US US16/274,633 patent/US10454410B2/en active Active
-
2021
- 2021-05-13 JP JP2021081696A patent/JP7127189B2/ja active Active
- 2021-07-27 IL IL285159A patent/IL285159B/en unknown
-
2022
- 2022-04-29 AU AU2022202838A patent/AU2022202838B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090037100A (ko) * | 2007-10-11 | 2009-04-15 | 박태선 | 태양광 발전 트래커 |
| WO2011134004A1 (en) * | 2010-04-27 | 2011-11-03 | Upton Ecoforlife Solar Trackers Pty. Ltd. | Solar tracking system |
| JP2013529849A (ja) * | 2010-06-29 | 2013-07-22 | スマート フラワー エナジー テクノロジー ゲゼルシャフト ミット ベシュレンクテル ハフツング | 折り畳み式のソーラーモジュール |
| WO2012073705A1 (ja) * | 2010-11-30 | 2012-06-07 | 株式会社Sp電機 | 太陽光発電装置 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20180064430A (ko) | 태양 패널을 위한 피봇 및 부채꼴 전개 구동기 | |
| JP2018531573A6 (ja) | 太陽光パネルの旋回扇動駆動部 | |
| JP6230718B2 (ja) | トルクリミッタ装置、システム並びに方法及びトルクリミッタを組み込んだ太陽追尾装置 | |
| US20160369778A1 (en) | Method of assembling a wind turbine | |
| EP3260409B1 (en) | Method of assembling a wind turbine | |
| EP2536512A2 (en) | Service platform | |
| CN205029609U (zh) | 采用推杆式双轴跟踪系统的暖棚上盖光伏设备 | |
| JP2014093383A (ja) | 太陽電池装置 | |
| CN112024493B (zh) | 全自动便携式应急卫星安全通信天伺系统 | |
| HK40038734B (zh) | 用於太阳能板的枢转展开驱动器 | |
| HK40038734A (en) | Pivot and development drive for solar panels | |
| JP2008232577A5 (ko) | ||
| JP5524314B2 (ja) | 太陽電池装置 | |
| CA2999927C (en) | Pivot and fanning drive for solar panels | |
| HK1254598B (zh) | 用於太陽能板的樞轉展開驅動器 | |
| HK40034628A (en) | Swivel and fanning drive for solar panels | |
| KR101776468B1 (ko) | 블레이드 운송차량의 균형조절장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20180424 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
Patent event date: 20180831 Comment text: Notification of Change of Applicant Patent event code: PN23011R01D |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210806 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20231123 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20240620 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240920 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240920 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |