KR20190117902A - 레이더 장치 및 그를 위한 안테나 장치 - Google Patents
레이더 장치 및 그를 위한 안테나 장치 Download PDFInfo
- Publication number
- KR20190117902A KR20190117902A KR1020180040833A KR20180040833A KR20190117902A KR 20190117902 A KR20190117902 A KR 20190117902A KR 1020180040833 A KR1020180040833 A KR 1020180040833A KR 20180040833 A KR20180040833 A KR 20180040833A KR 20190117902 A KR20190117902 A KR 20190117902A
- Authority
- KR
- South Korea
- Prior art keywords
- antenna
- receiving
- transmitting
- transmission
- antennas
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/0218—Very long range radars, e.g. surface wave radar, over-the-horizon or ionospheric propagation systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/41—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/27—Adaptation for use in or on movable bodies
- H01Q1/32—Adaptation for use in or on road or rail vehicles
- H01Q1/3208—Adaptation for use in or on road or rail vehicles characterised by the application wherein the antenna is used
- H01Q1/3233—Adaptation for use in or on road or rail vehicles characterised by the application wherein the antenna is used particular used as part of a sensor or in a security system, e.g. for automotive radar, navigation systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
- H01Q21/06—Arrays of individually energised antenna units similarly polarised and spaced apart
- H01Q21/061—Two dimensional planar arrays
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q21/00—Antenna arrays or systems
- H01Q21/06—Arrays of individually energised antenna units similarly polarised and spaced apart
- H01Q21/061—Two dimensional planar arrays
- H01Q21/065—Patch antenna array
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S2013/0236—Special technical features
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/027—Constructional details of housings, e.g. form, type, material or ruggedness
- G01S7/028—Miniaturisation, e.g. surface mounted device [SMD] packaging or housings
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Security & Cryptography (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Description
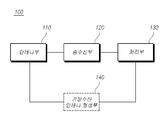
도 2는 본 발명의 일 실시예에 따른 레이더 장치에 대한 개략적인 블록 구성도이다.
도 3은 본 발명의 일 실시예에 따른 레이더 장치에 포함된 안테나부에 포함된 복수 개의 송신 안테나 및 복수 개의 수신 안테나의 배열 구성의 일예를 도시한다.
도 4는 본 실시예에 의한 레이더 장치를 이용하여 수평(Azimuth)정보를 감지하기 위한 경우로서, 특히 중/장거리 감지 모드에서의 신호 타이밍도(도 4a)와, 그 경우의 송수신 안테나의 등가 상태도(도 4b)이다.
도 5는 본 실시예에 의한 안테나 구성에서의 수평정보 감지를 위한 경우로서, 근거리 감지 모드에서의 신호 타이밍도(도 5a)와, 그 경우의 송수신 안테나의 등가 상태도(도 5b)이다.
도 6은 본 실시예에 의한 안테나 구성에서 수직정보 감지시의 송수신 안테나의 등가 상태도이다.
도 7은 본 발명의 일 실시예에 따른 레이더 장치가 제공하는 신호 처리 방법에 대한 흐름도이다.
도 8은 본 발명의 실시예에 의한 레이더 장치에서, 중장거리 감지모드와 근거리 감지모드에서의 신호파형 및 주파수대역의 차이를 도시한다.
120: 송수신부 130: 처리부
140 : 가상 안테나 형성부 TX0 : 제1-1송신안테나
TX2 : 제1-2송신안테나 TX1 : 제2송신안테나
RX0~RX3 : 제1~4수신안테나
RRX0~RRX2 : 제1~3 진성 수신안테나
VRX0~VRX2 : 제1~3가상 수신 안테나
Claims (15)
- 수평방향인 제2방향의 양단에 배치되는 제1-1송신안테나 및 제1-2송신안테나를 포함하는 제1송신안테나와, 상기 제1-1송신안테나 및 제1-2송신안테나 사이에 배치되되 지면에 수직한 제1방향으로 제1송신안테나와 일정한 수직거리 B만큼 이격하여 배치되는 제2송신안테나를 포함하는 송신안테나부와, 상기 제1송신안테나와 동일한 수직위치에 배치되는 하나 이상의 수신안테나를 포함하는 수신안테나부를 포함하는 안테나부;
2개 이상의 감지모드에 따라 상기 송신안테나 중 하나 이상을 선택하고, 선택된 송신안테나에서 송신신호를 송신하고, 상기 수신안테나 모두에서 반사신호를 수신하는 신호 송수신부; 및,
상기 수신안테나에서 수신한 반사신호를 처리하여 대상체의 수평정보 및 수직정보 중 하나 이상의 정보를 획득하는 처리부;
를 포함하는 것을 특징으로 하는 레이더 장치. - 제1항에 있어서,
상기 수신안테나부는 상기 제1방향에 수직한 제2방향으로 순차적으로 이격 배치되는 제1수신안테나(RX0), 제2수신안테나(RX1), 제3수신안테나(RX2), 제4수신안테나(RX3)를 포함하며,
상기 제1수신안테나(RX0) 및 제4수신안테나(RX3)는 각각 제2수신안테나(RX1)와 제3수신안테나(RX2) 사이의 중점으로부터 제1수평거리 A만큼 이격 배치되는 것을 특징으로 하는 레이더 장치. - 제2항에 있어서,
상기 제1-1송신안테나, 제1-2송신안테나 및 제2송신안테나는 각각 4개 또는 6개의 어레이 안테나를 포함하는 것을 특징으로 하는 레이더 장치. - 제3항에 있어서,
상기 제1-1송신안테나(TX0)와 상기 제1-2송신안테나(TX2)는 제2방향으로 제1수평거리의 2배에 해당되는 제2수평거리 2A만큼 이격 배치되는 것을 특징으로 하는 레이더 장치. - 제4항에 있어서,
제1수신안테나(RX0) 및 제4수신안테나(RX3)는 2개의 어레이 안테나이고, 제2수신안테나(RX1) 및 제3수신안테나(RX2)는 1개의 어레이 안테나이며, 상기 처리부는 상기 제2수신안테나(RX1) 및 제3수신안테나(RX2)에서 수신된 신호를 합성하여 하나의 수신채널로 사용하는 것을 특징으로 하는 레이더 장치. - 제3항에 있어서,
상기 감지모드는 중장거리 대상체의 수평정보 획득을 위한 제1감지모드를 포함하며, 상기 제1감지모드에서 상기 신호 송수신부는 상기 제1감지모드에서 제1-1송신안테나(TX0)와 제1-2송신안테나(TX2)에서 코드 분할된 송신신호를 송출하고, 상기 수신안테나부에 포함되는 모든 수신안테나에서 반사신호를 수신하는 것을 특징으로 하는 레이더 장치. - 제6항에 있어서,
상기 감지모드는 대상체의 수직정보 획득을 위한 제2감지모드를 포함하며, 상기 제2감지모드에서 상기 신호 송수신부는 상기 제1-1송신안테나(TX0)와 제2송신안테나(TX1) 또는 제1-2송신안테나(TX2)와 제2송신안테나(TX1)에서 코드 분할된 송신신호를 송출하고, 상기 수신안테나부에 포함되는 모든 수신안테나에서 반사신호를 수신하는 것을 특징으로 하는 레이더 장치. - 제7항에 있어서,
상기 감지모드는 근거리 대상체의 수직정보 또는 수평정보 획득을 위한 제3감지모드를 포함하며, 상기 제3감지모드에서 상기 신호 송수신부는 제1-1송신안테나(TX0), 제2송신안테나(TX1) 및 제1-2송신안테나(TX2) 중 선택된 하나의 송신안테나를 통하여 송신신호를 송출하고, 상기 수신안테나부에 포함되는 모든 수신안테나에서 반사신호를 수신하는 것을 특징으로 하는 레이더 장치. - 레이더 장치에 사용되는 안테나 장치로서,
수평방향인 제2방향의 양단에 배치되는 제1-1송신안테나 및 제1-2송신안테나를 포함하는 제1송신안테나와, 상기 제1-1송신안테나 및 제1-2송신안테나 사이에 배치되되 지면에 수직한 제1방향으로 제1송신안테나와 일정한 수직거리 B만큼 이격하여 배치되는 제2송신안테나를 포함하는 송신안테나부; 및,
상기 제1송신안테나와 동일한 수직위치에 배치되는 하나 이상의 수신안테나를 포함하는 수신안테나부;
를 포함하는 것을 특징으로 하는 안테나 장치. - 제9항에 있어서,
상기 수신안테나부는 상기 제1방향에 수직한 제2방향으로 순차적으로 이격 배치되는 제1수신안테나(RX0), 제2수신안테나(RX1), 제3수신안테나(RX2), 제4수신안테나(RX3)를 포함하며,
상기 제1수신안테나(RX0) 및 제4수신안테나(RX3)는 각각 제2수신안테나(RX1)와 제3수신안테나(RX2) 사이의 중점으로부터 제1수평거리 A만큼 이격 배치되는 것을 특징으로 하는 안테나 장치. - 제10항에 있어서,
상기 제1-1송신안테나, 제1-2송신안테나 및 제2송신안테나는 각각 4개 또는 6개의 어레이 안테나를 포함하는 것을 특징으로 하는 안테나 장치. - 제11항에 있어서,
상기 제1-1송신안테나(TX0)와 상기 제1-2송신안테나(TX2)는 제2방향으로 제1수평거리의 2배에 해당되는 제2수평거리 2A만큼 이격 배치되는 것을 특징으로 하는 안테나 장치. - 제12항에 있어서,
제1수신안테나(RX0) 및 제4수신안테나(RX3)는 2개의 어레이 안테나이고, 제2수신안테나(RX1) 및 제3수신안테나(RX2)는 1개의 어레이 안테나이며, 상기 제2수신안테나(RX1) 및 제3수신안테나(RX2)는 합성되어 하나의 수신채널로 사용되는 것을 특징으로 하는 안테나 장치. - 제13항에 있어서,
중장거리 대상체의 수평정보 획득을 위한 제1감지모드에서, 제1-1송신안테나(TX0)와 제1-2송신안테나(TX2)는 코드 분할된 송신신호를 송출하고, 상기 수신안테나부에 포함되는 모든 수신안테나가 반사신호를 수신하는 것을 특징으로 하는 안테나 장치. - 제14항에 있어서,
대상체의 수직정보 획득을 위한 제2감지모드에서, 상기 제1-1송신안테나(TX0)와 제2송신안테나(TX1) 또는 제1-2송신안테나(TX2)와 제2송신안테나(TX1)가 코드 분할된 송신신호를 송출하고, 상기 수신안테나부에 포함되는 모든 수신안테나가 반사신호를 수신하는 것을 특징으로 하는 안테나 장치.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180040833A KR102167097B1 (ko) | 2018-04-09 | 2018-04-09 | 레이더 장치 및 그를 위한 안테나 장치 |
| EP19167977.8A EP3553557A1 (en) | 2018-04-09 | 2019-04-08 | Radar apparatus and antenna apparatus therefor |
| US16/379,120 US11796662B2 (en) | 2018-04-09 | 2019-04-09 | Radar apparatus and antenna apparatus therefor |
| CN201910279540.0A CN110361738B (zh) | 2018-04-09 | 2019-04-09 | 雷达设备及其天线设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180040833A KR102167097B1 (ko) | 2018-04-09 | 2018-04-09 | 레이더 장치 및 그를 위한 안테나 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190117902A true KR20190117902A (ko) | 2019-10-17 |
| KR102167097B1 KR102167097B1 (ko) | 2020-10-16 |
Family
ID=66102574
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180040833A Active KR102167097B1 (ko) | 2018-04-09 | 2018-04-09 | 레이더 장치 및 그를 위한 안테나 장치 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11796662B2 (ko) |
| EP (1) | EP3553557A1 (ko) |
| KR (1) | KR102167097B1 (ko) |
| CN (1) | CN110361738B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230007142A (ko) * | 2021-07-05 | 2023-01-12 | 주식회사 에이치엘클레무브 | 차량용 레이더 장치 및 제어방법 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12140692B2 (en) * | 2019-01-31 | 2024-11-12 | Mitsubishi Electric Corporation | Antenna device and radar apparatus |
| US11754669B2 (en) * | 2019-09-30 | 2023-09-12 | Qualcomm Incorporated | Radar coordination for multi-radar coexistence |
| CN112698299B (zh) * | 2019-10-22 | 2024-08-30 | 广州极飞科技股份有限公司 | 一种雷达天线、雷达、无人机和设备 |
| CN111653865A (zh) * | 2019-12-03 | 2020-09-11 | 摩登汽车有限公司 | 车载天线结构和汽车导流板 |
| CN112955774A (zh) * | 2019-12-31 | 2021-06-11 | 深圳市大疆创新科技有限公司 | 微波雷达的天线组件、微波雷达及可移动平台 |
| EP3862773A1 (en) * | 2020-02-04 | 2021-08-11 | Aptiv Technologies Limited | Radar device |
| JP7413858B2 (ja) * | 2020-03-16 | 2024-01-16 | 株式会社デンソー | 測距モジュール |
| CN111786132B (zh) * | 2020-06-29 | 2022-01-07 | 珠海上富电技股份有限公司 | 一种基于mimo体制的雷达天线设计方法以及雷达天线 |
| CN115561745A (zh) * | 2020-07-17 | 2023-01-03 | 深圳市安卫普科技有限公司 | 一种非线性结点探测方法及探测器 |
| WO2022051076A1 (en) * | 2020-09-01 | 2022-03-10 | Sterling Labs Llc. | Dynamically changing audio properties |
| US11693107B2 (en) * | 2020-09-29 | 2023-07-04 | Steradian Semiconductors Private Limited | System, device and method for efficient MIMO radar |
| EP4012443A1 (en) * | 2020-12-08 | 2022-06-15 | Veoneer Sweden AB | A vehicle radar system |
| KR102288673B1 (ko) * | 2020-12-28 | 2021-08-12 | 주식회사 비트센싱 | 수평 간격 및 수직 간격으로 배치되는 복수의 안테나를 포함하는 레이더 장치 |
| CN112666524B (zh) * | 2020-12-31 | 2025-08-08 | 广州极飞科技股份有限公司 | 一种雷达与可移动平台 |
| DE102021200520A1 (de) * | 2021-01-21 | 2022-07-21 | Robert Bosch Gesellschaft mit beschränkter Haftung | MIMO-Radarsensor mit synchronisierten Hochfrequenzchips |
| US11860297B2 (en) * | 2021-03-08 | 2024-01-02 | GM Global Technology Operations LLC | High resolution unambiguous radar |
| CN113917460A (zh) * | 2021-09-30 | 2022-01-11 | 广州极飞科技股份有限公司 | 一种雷达成像设备及终端 |
| EP4397994A1 (en) * | 2023-01-05 | 2024-07-10 | GM Cruise Holdings LLC | Multi-step direction of arrival estimation for imaging radars |
| CN121312080A (zh) * | 2023-06-16 | 2026-01-09 | 中兴通讯股份有限公司 | 用于无线通信的方法、设备和计算机程序产品 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090007261A (ko) * | 2001-11-29 | 2009-01-16 | 인터디지탈 테크날러지 코포레이션 | 다중 입출력 사용자 장치 |
| JP2013044602A (ja) * | 2011-08-23 | 2013-03-04 | Nec Corp | 目標運動推測システム及び方法 |
| JP2017534881A (ja) * | 2014-09-23 | 2017-11-24 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 物体の仰角と方位角とを切り離して決定するmimoレーダ装置およびmimoレーダ装置を動作させる方法 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10256960B3 (de) * | 2002-12-05 | 2004-07-29 | Kathrein-Werke Kg | Zweidimensionales Antennen-Array |
| DE10360890A1 (de) * | 2003-12-19 | 2005-07-21 | Robert Bosch Gmbh | Radarsensor und Verfahren zu dessen Betrieb |
| JP2008145178A (ja) * | 2006-12-07 | 2008-06-26 | Denso Corp | 調整方法及び方位検出装置及び電子機器 |
| US7821443B2 (en) * | 2008-02-12 | 2010-10-26 | Infineon Technologies Ag | Dual mode radar methods and systems |
| US8289203B2 (en) * | 2009-06-26 | 2012-10-16 | Src, Inc. | Radar architecture |
| KR101137088B1 (ko) * | 2010-01-06 | 2012-04-19 | 주식회사 만도 | 통합 레이더 장치 및 통합 안테나 장치 |
| US8405541B2 (en) * | 2010-09-01 | 2013-03-26 | Toyota Motor Engineering & Manufacturing North America, Inc. | Multi-range radar system |
| JP2012168156A (ja) * | 2011-02-11 | 2012-09-06 | National Univ Corp Shizuoka Univ | 車載用のマルチビーム方式レーダ装置、マルチビーム方式レーダ方法およびマルチビーム方式レーダプログラム |
| DE102011113015A1 (de) * | 2011-09-09 | 2013-03-14 | Astyx Gmbh | Abbildender Radarsensor mit synthetischer Vergrößerung der Antennenaperatur und zweidimensionaler Strahlschwenkung |
| US9121930B2 (en) * | 2012-06-25 | 2015-09-01 | Autoliv Asp, Inc. | Two-channel monopulse radar for three-dimensional detection |
| DE102013102424A1 (de) * | 2013-03-11 | 2014-09-11 | Stefan Trummer | Polarimetrisches Radar zur Objektklassifikation sowie geeignetes Verfahren und Verwendung hierfür |
| KR20150017976A (ko) * | 2013-08-08 | 2015-02-23 | 주식회사 만도 | 차량용 레이더 및 그 운용 방법 |
| JP2015068724A (ja) | 2013-09-30 | 2015-04-13 | 富士通テン株式会社 | レーダ装置、車両制御システム、および、信号処理方法 |
| US20150253419A1 (en) | 2014-03-05 | 2015-09-10 | Delphi Technologies, Inc. | Mimo antenna with improved grating lobe characteristics |
| US9568600B2 (en) | 2014-03-05 | 2017-02-14 | Delphi Technologies, Inc. | MIMO antenna with elevation detection |
| US9541639B2 (en) * | 2014-03-05 | 2017-01-10 | Delphi Technologies, Inc. | MIMO antenna with elevation detection |
| JP2015172491A (ja) * | 2014-03-11 | 2015-10-01 | 富士通テン株式会社 | アンテナ、レーダ装置、および、車両制御システム |
| KR102378478B1 (ko) * | 2015-08-31 | 2022-03-25 | 엘지이노텍 주식회사 | 레이더 모듈 및 이를 포함하는 차량용 레이더 장치 |
| CN114185042B (zh) * | 2015-09-17 | 2025-08-12 | 松下汽车电子系统株式会社 | 雷达装置 |
| EP3156817B8 (en) | 2015-10-12 | 2019-01-09 | Aptiv Technologies Limited | Mimo radar antenna for detecting an angle of elevation |
| DE102016203160A1 (de) | 2016-02-29 | 2017-08-31 | Robert Bosch Gmbh | Radarsystem, umfassend eine Antennenanordnung zum Senden und Empfangen elektromagnetischer Strahlung |
| WO2017218876A1 (en) * | 2016-06-17 | 2017-12-21 | Quovard Management Llc | Radar antenna array |
| KR102589762B1 (ko) * | 2016-06-20 | 2023-10-17 | 주식회사 에이치엘클레무브 | 레이더 장치 및 레이더 신호 처리 방법 |
| KR102662232B1 (ko) * | 2016-11-28 | 2024-05-02 | 주식회사 에이치엘클레무브 | 다중입력 다중출력 안테나부를 포함하는 레이더 장치 |
| US10677918B2 (en) * | 2017-02-28 | 2020-06-09 | Analog Devices, Inc. | Systems and methods for improved angular resolution in multiple-input multiple-output (MIMO) radar |
| JP6570610B2 (ja) * | 2017-12-22 | 2019-09-04 | 三菱電機株式会社 | レーダ装置 |
| US10670712B2 (en) * | 2018-01-04 | 2020-06-02 | Analog Devices, Inc. | Methods and apparatus for a MIMO radar |
-
2018
- 2018-04-09 KR KR1020180040833A patent/KR102167097B1/ko active Active
-
2019
- 2019-04-08 EP EP19167977.8A patent/EP3553557A1/en active Pending
- 2019-04-09 US US16/379,120 patent/US11796662B2/en active Active
- 2019-04-09 CN CN201910279540.0A patent/CN110361738B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090007261A (ko) * | 2001-11-29 | 2009-01-16 | 인터디지탈 테크날러지 코포레이션 | 다중 입출력 사용자 장치 |
| JP2013044602A (ja) * | 2011-08-23 | 2013-03-04 | Nec Corp | 目標運動推測システム及び方法 |
| JP2017534881A (ja) * | 2014-09-23 | 2017-11-24 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | 物体の仰角と方位角とを切り離して決定するmimoレーダ装置およびmimoレーダ装置を動作させる方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230007142A (ko) * | 2021-07-05 | 2023-01-12 | 주식회사 에이치엘클레무브 | 차량용 레이더 장치 및 제어방법 |
| US12360238B2 (en) | 2021-07-05 | 2025-07-15 | Hl Klemove Corp. | Vehicle radar apparatus and method of controlling the same |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3553557A1 (en) | 2019-10-16 |
| US11796662B2 (en) | 2023-10-24 |
| CN110361738B (zh) | 2024-02-23 |
| US20190310359A1 (en) | 2019-10-10 |
| KR102167097B1 (ko) | 2020-10-16 |
| CN110361738A (zh) | 2019-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102167097B1 (ko) | 레이더 장치 및 그를 위한 안테나 장치 | |
| KR102167084B1 (ko) | 레이더 장치 및 그를 위한 안테나 장치 | |
| KR102662232B1 (ko) | 다중입력 다중출력 안테나부를 포함하는 레이더 장치 | |
| KR102653129B1 (ko) | 레이더 장치 및 그를 위한 안테나 장치 | |
| KR102662238B1 (ko) | 레이더 장치 및 그를 위한 안테나 장치 | |
| KR102647693B1 (ko) | 레이더 장치 및 그의 오차 보정 방법 | |
| KR101137088B1 (ko) | 통합 레이더 장치 및 통합 안테나 장치 | |
| CN113625280B (zh) | 车辆用雷达装置、雷达装置的控制方法及车辆用雷达系统 | |
| KR102814886B1 (ko) | 레이더 장치, 레이더 장치용 안테나 장치 및 레이더 장치의 제어 방법 | |
| KR20200095703A (ko) | 차량용 레이더 센서장치 및 물체 감지방법과 그를 위한 안테나 장치 | |
| KR102651145B1 (ko) | 레이더 장치 및 그를 위한 안테나 장치 | |
| US11802960B2 (en) | Phase correcting apparatus and method of transmission signal of vehicle radar, and vehicle radar apparatus with the same | |
| US11681039B2 (en) | Failure determination apparatus and method of vehicle radar apparatus, and vehicle radar apparatus with the same | |
| US11921230B2 (en) | Radar device and signal processing method | |
| KR20220089824A (ko) | 이동기기 장애물감지용 스마트센서장치 | |
| US12360238B2 (en) | Vehicle radar apparatus and method of controlling the same | |
| KR20230016395A (ko) | 차량용 레이더 장치 및 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| R18 | Changes to party contact information recorded |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R18-OTH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |