KR20200021990A - 지게차용 클램핑 장치, 및 클램핑 장치를 포함하는 지게차 - Google Patents
지게차용 클램핑 장치, 및 클램핑 장치를 포함하는 지게차 Download PDFInfo
- Publication number
- KR20200021990A KR20200021990A KR1020207001444A KR20207001444A KR20200021990A KR 20200021990 A KR20200021990 A KR 20200021990A KR 1020207001444 A KR1020207001444 A KR 1020207001444A KR 20207001444 A KR20207001444 A KR 20207001444A KR 20200021990 A KR20200021990 A KR 20200021990A
- Authority
- KR
- South Korea
- Prior art keywords
- forklift
- clamping device
- clamping arm
- clamping
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/18—Load gripping or retaining means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F17/00—Safety devices, e.g. for limiting or indicating lifting force
- B66F17/003—Safety devices, e.g. for limiting or indicating lifting force for fork-lift trucks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
Description
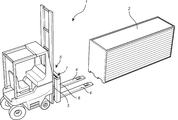
도 1은, 본 발명의 제2 태양에 따른 화물을 운송하기 위한 지게차의 예시적인 실시예에 설치된 경우의, 본 발명의 제1 태양에 따른 클램핑 장치의 예시적인 실시예의 사시도이다.
도 2a 내지 도 2d는, 도 1의 지게차에 대한 적재 순서의 사시도이다.
Claims (11)
- 지게차(1)용 클램핑 장치(5)로서,
상기 클램핑 장치(5)의 적재 영역(Loading Area)에서 상기 지게차(1)에 연결할 수 있는 몸체(6),
상기 몸체(6)에 연결되고, 상기 몸체(6)에 대해 이동 가능한 클램핑 아암(Clamping Arm)(7), 및
(i) 상기 클램핑 아암(7)이 상기 적재 영역 밖에 위치하는 유휴 위치(Idle Position)와 (ii) 상기 클램핑 아암(7)이 상기 적재 영역으로 이동하여 상기 지게차(1)에 의해 운송된 화물(2)을 고정하는 작동 위치(Working Position) 사이를 상기 클램핑 아암(7)이 움직이도록 배치된 구동부(Driving Unit)를 포함하고,
상기 클램핑 아암(7)은 수직 방향으로 상기 몸체(6)에 대해 이동 가능하고, 수평면에서 회전 가능한 클램핑 장치(5). - 제1항에 있어서,
상기 클램핑 아암(7)의 제1 부분(9)이 수직 방향으로 상기 몸체(6)에 대해 이동 가능하고, 상기 클램핑 아암(7)의 제2 부분(10)이 상기 수평면에서 회전 가능(Pivotable)하고, 상기 클램핑 아암(7)의 상기 제2 부분(10)은 상기 클램핑 아암(7)의 상기 제1 부분(9)에 회전 가능하게 배치되어 있는 클램핑 장치(5). - 제2항에 있어서,
상기 클램핑 아암(7)의 상기 제2 부분(10)이, 수직 방향으로 회전 가능한 클램핑 장치(5). - 제2항 또는 제3항에 있어서,
상기 구동부는, 상기 클램핑 아암(7)의 상기 제1 부분(9)을 이동시키기 위한 제1 구동 수단(Drive Mean)과, 상기 클램핑 아암(7)의 상기 제2 부분(10)을 구동하기 위한 제2 구동 수단을 포함하는 클램핑 장치(5). - 제1항 내지 제4항 중의 어느 한 항에 있어서,
상기 클램핑 아암(7) 상에 배치되고 제어부(Control Unit)에 연결된 적어도 하나의 센서를 더 포함하고, 상기 제어부는, 상기 적어도 하나의 센서로부터 나온 정보에 기초하여 상기 구동부를 제어하도록 적응된 클램핑 장치(5). - 제5항에 있어서,
상기 제어부는, 상기 구동부의 적재 임계 값(Load Threshold Value)에 기초하여 상기 구동부를 정지하도록 적응되고, 상기 구동부는 상기 센서인 클램핑 장치(5). - 제1항 내지 제6항 중의 어느 한 항에 있어서,
상기 적어도 하나의 센서는 압력 센서, 광 센서, 및 근접 센서로 이루어진 그룹으로부터 선택된 어느 하나를 포함하는 클램핑 장치(5). - 제1항 내지 제7항 중의 어느 한 항에 있어서,
제어 시스템에 의해 제어되는 클램핑 장치(5). - 제8항에 있어서,
상기 제어 시스템은, 운전자에 의해 원격으로 조작되는 클램핑 장치(5). - 제1항 내지 제9항에 있어서,
상기 유휴 위치 및/또는 상기 작동 위치가, 광 신호 및/또는 음향 신호에 의해 출력되는 클램핑 장치(5). - 화물(2)을 운반하기 위한 지게차(1)로서,
본체(3);
화물(2)을 운반하기 위한 상기 지게차(1)의 상기 본체(3)에 연결된 적어도 2개의 포크들(Forks)(4); 및
제1항 내지 제10항 중 어느 한 항에 따른 클램핑 장치(5)를 포함하고,
상기 클램핑 장치(5)의 상기 몸체(6)가 상기 본체(3)의 측면으로 상기 지게차(1)에 장착된 지게차(1).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE1750763A SE541226C2 (en) | 2017-06-15 | 2017-06-15 | A clamping device for a forklift and a forklift having such a clamping device |
| SE1750763-3 | 2017-06-15 | ||
| PCT/SE2018/050617 WO2018231134A1 (en) | 2017-06-15 | 2018-06-13 | A clamping device for a forklift and a forklift having such a clamping device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200021990A true KR20200021990A (ko) | 2020-03-02 |
| KR102526988B1 KR102526988B1 (ko) | 2023-04-28 |
Family
ID=64659417
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207001444A Active KR102526988B1 (ko) | 2017-06-15 | 2018-06-13 | 지게차용 클램핑 장치, 및 클램핑 장치를 포함하는 지게차 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10850962B2 (ko) |
| EP (1) | EP3638613A4 (ko) |
| KR (1) | KR102526988B1 (ko) |
| CN (1) | CN110914190B (ko) |
| SE (1) | SE541226C2 (ko) |
| WO (1) | WO2018231134A1 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115196261B (zh) | 2021-04-12 | 2024-07-26 | 泰科电子(上海)有限公司 | 周转箱自动搬运系统 |
| KR102611740B1 (ko) * | 2021-06-11 | 2023-12-07 | 두산산업차량 주식회사 | 팔레트 클램프 장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2684165A (en) * | 1952-06-09 | 1954-07-20 | Blackwelder Mfg Co | Laterally shiftable fork lift for tractors |
| US2799417A (en) * | 1956-10-30 | 1957-07-16 | John P Morrell | Power driven material handling truck with stacking mechanism |
| US4136793A (en) * | 1977-04-25 | 1979-01-30 | Dutra Jr Joseph G | Load stabilizer for forklift truck |
| US4354795A (en) * | 1981-02-13 | 1982-10-19 | Dutra Jr Joseph G | Load stabilizer assembly with pivotal mount for a forklift truck |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3272364A (en) * | 1963-12-13 | 1966-09-13 | Clark Equipment Co | Combination clamp-grab attachment for lift truck |
| US3412882A (en) * | 1967-05-31 | 1968-11-26 | Stockwell Mfg Company | Tiltable loading and unloading truck bed construction |
| US3493137A (en) * | 1968-06-13 | 1970-02-03 | Shepard Co Lewis | Pallet clamping device |
| US3633778A (en) * | 1970-07-27 | 1972-01-11 | Metropolitan Stevedore Co | Load stabilizing apparatus |
| US3773202A (en) * | 1972-08-28 | 1973-11-20 | J Dutra | Adjustable load stabilizer frame for forklift truck and method |
| JPS59500668A (ja) * | 1982-04-22 | 1984-04-19 | トウモ−タ− コ−ポレ−シヨン | フオ−ク位置の保持装置 |
| DE3422976A1 (de) * | 1984-06-22 | 1986-01-02 | Wolfgang 7958 Laupheim Baumann | Stapelstaender |
| US4659277A (en) * | 1985-12-02 | 1987-04-21 | Lloyd Widener | Unstable load stabilizing and handling attachment |
| JP2536076B2 (ja) * | 1988-07-04 | 1996-09-18 | 株式会社豊田自動織機製作所 | リ―チ式フォ―クリフトのリ―チ動作制御装置 |
| DE4003448A1 (de) * | 1990-02-06 | 1991-08-08 | Ver Glaswerke Gmbh | Transportpalette fuer autoglasscheiben |
| FR2773551B1 (fr) * | 1998-01-09 | 2000-03-24 | Fleury Michon Logistique | Magasin a palettes, chariot de manutention pour palettes equipe d'un tel magasin et procede d'alimentation en palettes du chariot |
| JP3981885B2 (ja) * | 2003-05-20 | 2007-09-26 | 株式会社ダイフク | 搬送装置 |
| CN1272232C (zh) * | 2004-04-18 | 2006-08-30 | 彭雪峰 | 叉车用货物防跌落装置 |
| US20070189888A1 (en) * | 2006-02-09 | 2007-08-16 | Tanner Thomas H | Manipulator |
| CN201962031U (zh) * | 2010-09-14 | 2011-09-07 | 杨仕辉 | 一种袋装水泥叉车装车机 |
| CN104671156A (zh) * | 2013-11-27 | 2015-06-03 | 铜陵市精品工具模具有限责任公司 | 一种叉车用夹紧装置 |
| CN203582410U (zh) * | 2013-12-12 | 2014-05-07 | 浙江佳力科技股份有限公司 | 叉车压箱机构 |
| CN103964343A (zh) * | 2014-04-13 | 2014-08-06 | 湖南朝晖环境科技有限公司 | 升降翻转移动平台 |
| CN204138297U (zh) * | 2014-09-30 | 2015-02-04 | 久芳(郑州)生物科技有限公司 | 可调节压紧盖板角度的叉车 |
| CN205114531U (zh) * | 2015-10-23 | 2016-03-30 | 张运福 | 一种货场储运和物流库管用纯电动子母式智能装载机器人 |
-
2017
- 2017-06-15 SE SE1750763A patent/SE541226C2/en unknown
-
2018
- 2018-06-13 CN CN201880028746.XA patent/CN110914190B/zh active Active
- 2018-06-13 EP EP18818463.4A patent/EP3638613A4/en active Pending
- 2018-06-13 WO PCT/SE2018/050617 patent/WO2018231134A1/en not_active Ceased
- 2018-06-13 US US16/622,378 patent/US10850962B2/en active Active
- 2018-06-13 KR KR1020207001444A patent/KR102526988B1/ko active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2684165A (en) * | 1952-06-09 | 1954-07-20 | Blackwelder Mfg Co | Laterally shiftable fork lift for tractors |
| US2799417A (en) * | 1956-10-30 | 1957-07-16 | John P Morrell | Power driven material handling truck with stacking mechanism |
| US4136793A (en) * | 1977-04-25 | 1979-01-30 | Dutra Jr Joseph G | Load stabilizer for forklift truck |
| US4354795A (en) * | 1981-02-13 | 1982-10-19 | Dutra Jr Joseph G | Load stabilizer assembly with pivotal mount for a forklift truck |
Also Published As
| Publication number | Publication date |
|---|---|
| SE541226C2 (en) | 2019-05-07 |
| EP3638613A1 (en) | 2020-04-22 |
| KR102526988B1 (ko) | 2023-04-28 |
| CN110914190A (zh) | 2020-03-24 |
| SE1750763A1 (en) | 2018-12-16 |
| WO2018231134A1 (en) | 2018-12-20 |
| US10850962B2 (en) | 2020-12-01 |
| US20200198950A1 (en) | 2020-06-25 |
| CN110914190B (zh) | 2021-03-02 |
| EP3638613A4 (en) | 2021-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0302890B1 (en) | Load lifting device load sensing | |
| EP3040235B1 (en) | Trailer for a route train | |
| US20230135834A1 (en) | Industrial truck with a load receiving element for receiving elongated goods | |
| KR102526988B1 (ko) | 지게차용 클램핑 장치, 및 클램핑 장치를 포함하는 지게차 | |
| KR20150098508A (ko) | 무인 자동 운반장치 | |
| CN109677819B (zh) | 自动引导运输车和货物搬运系统 | |
| US6789995B1 (en) | Vehicle for handling sheet metal coils | |
| EP2225140A1 (en) | Transportation device | |
| KR102773322B1 (ko) | 자율 주행 지게차용 작업자 안전을 위한 안전 감지 범퍼 장치 및 이를 포함한 자율 주행 지게차 | |
| EP3556720B1 (en) | Apparatus for controlling irradiated light on forklift | |
| JP2005187158A (ja) | 移載装置 | |
| KR20190087051A (ko) | 화물차량 일체형 지게장치 및 이를 구비하는 지게장치 일체형 기능성 화물차량 | |
| KR20070068519A (ko) | 지게차의 전조등 제어장치 | |
| KR20160124444A (ko) | 모니터링 기능이 부가된 지게차 | |
| FI73394C (fi) | Anordning foer transport av tunga cylindriska foeremaol i verkstaeder. | |
| KR20080011736A (ko) | 충돌 예방 수단을 갖는 포크리프트 | |
| JP4893966B2 (ja) | 自動倉庫 | |
| JP4737497B2 (ja) | パレットロック装置 | |
| JP2000211748A (ja) | パレット積み込み装置 | |
| CN116969385A (zh) | 一种大平衡重式叉车的门架传感器布置方法 | |
| CN110799445B (zh) | 包括装载止挡件的升降运输车 | |
| KR20260058958A (ko) | 로딩 위치 설정이 가능한 리프팅 기능을 갖는 자율주행 모빌리티 | |
| JP4399737B2 (ja) | 物品移載装置 | |
| JPS63180700A (ja) | 無人フオ−クリフト | |
| JPS60197599A (ja) | フオ−クリフト用ドラム缶検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |