KR20200037814A - 축방향 스러스트 밸런싱 디바이스 - Google Patents
축방향 스러스트 밸런싱 디바이스 Download PDFInfo
- Publication number
- KR20200037814A KR20200037814A KR1020207005539A KR20207005539A KR20200037814A KR 20200037814 A KR20200037814 A KR 20200037814A KR 1020207005539 A KR1020207005539 A KR 1020207005539A KR 20207005539 A KR20207005539 A KR 20207005539A KR 20200037814 A KR20200037814 A KR 20200037814A
- Authority
- KR
- South Korea
- Prior art keywords
- thrust
- segment
- axial
- section
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/04—Shafts or bearings, or assemblies thereof
- F04D29/041—Axial thrust balancing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01D—NON-POSITIVE DISPLACEMENT MACHINES OR ENGINES, e.g. STEAM TURBINES
- F01D3/00—Machines or engines with axial-thrust balancing effected by working-fluid
- F01D3/04—Machines or engines with axial-thrust balancing effected by working-fluid axial thrust being compensated by thrust-balancing dummy piston or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D1/00—Radial-flow pumps, e.g. centrifugal pumps; Helico-centrifugal pumps
- F04D1/06—Multi-stage pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/04—Shafts or bearings, or assemblies thereof
- F04D29/041—Axial thrust balancing
- F04D29/0416—Axial thrust balancing balancing pistons
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/051—Axial thrust balancing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/051—Axial thrust balancing
- F04D29/0516—Axial thrust balancing balancing pistons
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/05—Shafts or bearings, or assemblies thereof, specially adapted for elastic fluid pumps
- F04D29/053—Shafts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/18—Rotors
- F04D29/22—Rotors specially for centrifugal pumps
- F04D29/2261—Rotors specially for centrifugal pumps with special measures
- F04D29/2266—Rotors specially for centrifugal pumps with special measures for sealing or thrust balance
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01D—NON-POSITIVE DISPLACEMENT MACHINES OR ENGINES, e.g. STEAM TURBINES
- F01D5/00—Blades; Blade-carrying members; Heating, heat-insulating, cooling or antivibration means on the blades or the members
- F01D5/02—Blade-carrying members, e.g. rotors
- F01D5/04—Blade-carrying members, e.g. rotors for radial-flow machines or engines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/26—Rotors specially for elastic fluids
- F04D29/28—Rotors specially for elastic fluids for centrifugal or helico-centrifugal pumps for radial-flow or helico-centrifugal pumps
- F04D29/284—Rotors specially for elastic fluids for centrifugal or helico-centrifugal pumps for radial-flow or helico-centrifugal pumps for compressors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2240/00—Components
- F05D2240/60—Shafts
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
- Control Of Non-Positive-Displacement Pumps (AREA)
Abstract
Description
도 2는 선행기술의 스러스트 보상 드럼의 개략적 단면도이다.
도 3a는 본 발명의 실시예들이 적용될 수 있는 로터리 펌프의 측면도이다.
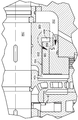
도 3b는 도 3a의 펌프의 단면도이다.
도 4는 본 발명의 일 실시예가 구현되는 도 3b의 펌프의 영역의 확대 단면도이다.
도 5는 저-스러스트(low-thrust) 구성에서 도시된 도 4의 실시예의 확대 단면도이다.
도 6은 고-스러스트(high-thrust) 구성에서 도시된 도 4의 실시예의 확대 단면도이다.
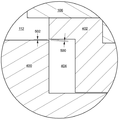
도 7은 그들 사이에 중간 챔버를 가진 2개의 압력 릴리프 갭들을 형성하는 계단식(step-wise) 회전자 구역과 고정자 영역을 포함하는 일 실시예의 단면도이다.
도 8은 본 발명의 일 실시예에서 축방향 샤프트 위치의 함수로서 스러스트를 보상하는 그래프로서, 계산 유체 역학에 의해 생성된 점들을 분석 곡선과 비교한다.
104...누설 챔버
110...드럼 갭
112...수집 챔버
200...밸런싱 드럼
400...회전자 요소
402...고정자 요소
404...중간 챔버
500...갭
502...최소 회전자/고정자 클리어런스
604...중간 챔버
Claims (11)
- 축방향 스러스트(thrust)에 의해 발생되는 축방향 변위를 받는 샤프트를 구비하는 장치의 스러스트 조절 메커니즘으로서,
회전가능한 샤프트에 길이 방향으로 고정되고 상기 샤프트와 동축인 제1 세그먼트, 및 상기 샤프트를 둘러싸지만 길이 방향으로 상기 샤프트에 고정되지 않는 제2 세그먼트를 구비하고, 상기 제1 세그먼트와 상기 제2 세그먼트는 상기 장치의 작동 동안 그들 사이에 상대 회전이 있도록 구성되고, 상기 제2 세그먼트는 고압 유체 영역과 유체 연통하고;
상기 제1 세그먼트와 상기 제2 세그먼트 중 어느 하나에 포함된 원통형 수형(male) 섹션, 및 상기 제1 세그먼트와 상기 제2 세그먼트 중 다른 하나에 포함된 원통형 암형(female) 섹션을 구비하고, 상기 수형 섹션은 원형 리딩 에지에 의해 종결되고 상기 암형 섹션은 상기 수형 섹션의 상기 원형 리딩 에지보다 직경이 더 큰 원형 개구에 의해 전방 에지에서 종결되고;
상기 수형 섹션의 리딩 에지와 상기 암형 섹션의 전방 에지 사이에 압력 릴리프 갭을 형성할 수 있도록, 상기 수형 섹션의 상기 리딩 에지는 상기 암형 섹션 속으로 들어가지 않고 상기 암형 섹션의 상기 전방 에지에 근접하게 위치되고, 가압된 유체는 상기 압력 릴리프 갭을 통해 상기 제2 세그먼트로부터 상기 제1 세그먼트를 지나서 저압 영역으로 유동할 수 있는 한편, 상기 축방향 스러스트에 대항하는 축방향 보상력은 상기 가압된 유체에 의해 상기 제1 세그먼트에 인가되고,
상기 압력 릴리프 갭은 상기 축방향 변위에 의해 크기가 감소됨으로써, 축방향 스러스트와 축방향 변위가 증가될 때 보상력이 증가되고, 결과적으로 상기 압력 릴리프 갭의 크기가 감소되는, 스러스트 조절 메커니즘.
- 청구항 1에서,
상기 장치는 컴프레서(compressor)인, 스러스트 조절 메커니즘.
- 청구항 1 또는 청구항 2에서,
상기 장치는 터빈(turbin)인, 스러스트 조절 메커니즘.
- 청구항 1 내지 청구항 3 중 어느 한 항에서,
상기 장치는 터빈으로서 회전하는 펌프인, 스러스트 조절 메커니즘.
- 청구항 1 내지 청구항 4 중 어느 한 항에서,
상기 장치는 터보 펌프인, 스러스트 조절 메커니즘.
- 청구항 5에서,
상기 장치는 다단 터보 펌프인, 스러스트 조절 메커니즘.
- 청구항 5 또는 청구항 6에서,
상기 암형 섹션은 상기 터보 펌프의 임펠러를 지나서 누출되는 유체로 채워지도록 구성된, 스러스트 조절 메커니즘.
- 청구항 1 내지 청구항 7 중 어느 한 항에서,
상기 저압 영역은 상기 장치의 유체 입구 영역인, 스러스트 조절 메커니즘.
- 청구항 1 내지 청구항 8 중 어느 한 항에서,
상기 장치는 상기 축방향 스러스트를 대향하지만 상기 축방향 스러스트를 소거하지 않도록 구성되는 스러스트 감소 드럼 메커니즘을 더 구비하고,
상기 드럼 메커니즘은 비-회전 통로 내에서 상기 통로에 대하여 회전하도록 구성된 원통형 드럼 섹션, 및 상기 축방향 변위와 무관한 방사상 갭 크기를 가지고 상기 드럼과 상기 통로 사이에 형성된 방사상 갭을 구비하고,
상기 드럼과 상기 통로의 어느 하나는 길이 방향으로 상기 샤프트에 고정되고, 상기 드럼 메커니즘에 의해 보상되지 않는 잔류 축방향 스러스트는 상기 스러스트 조절 메커니즘에 의해 조절되는, 스러스트 조절 메커니즘.
- 청구항 1 내지 청구항 9 중 어느 한 항에서,
상기 장치는 복수의 수형 섹션들과 대응하는 복수의 암형 섹션들을 포함하고,
대응하는 수형 섹션들과 암형 섹션들의 리딩 에지와 전방 에지는, 가압된 유체가 고압 유체 영역으로부터 저압 영역으로 유동함에 따라 상기 가압된 유체가 가로지르는 복수의 갭들과 중간 챔버들을 형성하기 위해, 서로 인접하게 되어 있고,
복수의 갭들의 각각은 회전가능한 샤프트의 축방향 변위에 의해 감소되는 크기를 가진, 스러스트 조절 메커니즘.
- 청구항 1 내지 청구항 10 중 어느 한 항에서,
회전자 요소의 수형 섹션이 고정자 요소의 암형 섹션으로 들어가기 전에 보상력의 크기가 축방향 스러스트의 크기의 적어도 90%까지 상승하도록 구성된, 메커니즘.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/691,899 | 2017-08-31 | ||
| US15/691,899 US10513928B2 (en) | 2017-08-31 | 2017-08-31 | Axial thrust balancing device |
| PCT/US2018/042464 WO2019045894A1 (en) | 2017-08-31 | 2018-07-17 | AXIAL PUSH BALANCING DEVICE |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200037814A true KR20200037814A (ko) | 2020-04-09 |
| KR102370184B1 KR102370184B1 (ko) | 2022-03-03 |
Family
ID=65436925
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207005539A Active KR102370184B1 (ko) | 2017-08-31 | 2018-07-17 | 축방향 스러스트 밸런싱 디바이스 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10513928B2 (ko) |
| EP (1) | EP3676499B1 (ko) |
| JP (1) | JP6953624B2 (ko) |
| KR (1) | KR102370184B1 (ko) |
| CN (1) | CN111033053B (ko) |
| AR (1) | AR112990A1 (ko) |
| BR (1) | BR112020002805B1 (ko) |
| MX (1) | MX2020002236A (ko) |
| SA (1) | SA520411411B1 (ko) |
| WO (1) | WO2019045894A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102876382B1 (ko) * | 2024-11-22 | 2025-10-27 | 현대중공업터보기계 주식회사 | 축방향추력을 저감하는 밸런싱구조가 적용된 원심펌프 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110119564B (zh) * | 2019-05-07 | 2022-02-15 | 中铁工程装备集团有限公司 | 一种基于盾尾间隙的自动测量的管片预选方法 |
| CN111255528B (zh) * | 2020-01-22 | 2022-03-04 | 天津大学 | 一种千瓦量级超临界二氧化碳透平轴向力的平衡装置 |
| CN111173770A (zh) * | 2020-03-12 | 2020-05-19 | 中国大唐集团科学技术研究院有限公司华东电力试验研究院 | 离心泵的轴向力平衡结构 |
| CN111946638B (zh) * | 2020-09-17 | 2024-11-05 | 珠海格力电器股份有限公司 | 多级离心压缩机及制冷系统 |
| JP2022068479A (ja) * | 2020-10-22 | 2022-05-10 | 三菱重工コンプレッサ株式会社 | 回転機械及びギアド圧縮機 |
| KR102825917B1 (ko) | 2023-09-01 | 2025-06-27 | 한국항공우주연구원 | 축추력 밸런싱이 가능한 터보펌프 |
| CN119982621B (zh) * | 2025-02-26 | 2025-10-28 | 清华大学 | 一种闭式叶轮离心压缩机轴向力调节结构及离心压缩机 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006077694A (ja) * | 2004-09-10 | 2006-03-23 | Mitsubishi Heavy Ind Ltd | 遠心ポンプ |
| JP2007085223A (ja) * | 2005-09-21 | 2007-04-05 | Mitsubishi Heavy Ind Ltd | 軸スラストのバランス機構 |
| JP2011202641A (ja) * | 2010-03-26 | 2011-10-13 | Honda Motor Co Ltd | 電動圧縮機 |
| JP2014134131A (ja) * | 2013-01-10 | 2014-07-24 | Panasonic Corp | ターボ圧縮機 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH501839A (fr) * | 1966-11-12 | 1971-01-15 | Zabrzanska Fabryka Masz Gornic | Pompe dynamique |
| US3614181A (en) * | 1970-07-02 | 1971-10-19 | Us Air Force | Magnetic bearing for combined radial and thrust loads |
| US5209652A (en) * | 1991-12-06 | 1993-05-11 | Allied-Signal, Inc. | Compact cryogenic turbopump |
| ES2138060T3 (es) * | 1994-07-25 | 2000-01-01 | Sulzer Pumpen Ag | Bomba centrifuga con un dispositivo de elevacion. |
| CN2241242Y (zh) * | 1995-03-04 | 1996-11-27 | 辛育霖 | 叶片泵 |
| AU9068798A (en) * | 1997-07-26 | 1999-02-16 | Allweiler Ag | Mounting for a turbo-machine rotor and its use |
| JP2007005223A (ja) | 2005-06-27 | 2007-01-11 | Shin Etsu Polymer Co Ltd | 押釦スイッチ用カバー部材 |
| US7731476B2 (en) | 2007-01-30 | 2010-06-08 | Technology Commercialization Corp. | Method and device for reducing axial thrust and radial oscillations and rotary machines using same |
| FR2941019A1 (fr) * | 2009-01-09 | 2010-07-16 | Snecma | Pompe a dispositif d'equilibrage axial |
| FR2945330B1 (fr) * | 2009-05-11 | 2011-07-15 | Snecma | Pompe centrifuge a double echappement. |
| CN201636067U (zh) * | 2010-04-26 | 2010-11-17 | 佳木斯大学 | 超深井潜水泵的轴向力平衡装置 |
| DE102011085681A1 (de) * | 2011-11-03 | 2013-05-08 | Abb Turbo Systems Ag | Hydrodynamisches Axiallager |
| CN202579208U (zh) * | 2012-05-17 | 2012-12-05 | 烟台盛泉泵业有限公司 | 一种改进的磁力泵 |
| CN104747458A (zh) * | 2013-12-27 | 2015-07-01 | 博西华电器(江苏)有限公司 | 排放液体的泵及具有该泵的家用电器 |
| JP2016061252A (ja) * | 2014-09-19 | 2016-04-25 | 三菱重工業株式会社 | 回転機械 |
| CN204226256U (zh) * | 2014-10-08 | 2015-03-25 | 中国船舶重工集团公司第七0四研究所 | 双间隙高流阻平衡装置 |
| KR102213232B1 (ko) * | 2014-10-20 | 2021-02-08 | 현대중공업터보기계 주식회사 | 고압 수평형 펌프 |
| DE102014226951A1 (de) * | 2014-12-23 | 2016-06-23 | Robert Bosch Gmbh | Turbomaschine |
| JP2016148308A (ja) * | 2015-02-13 | 2016-08-18 | 三菱重工業株式会社 | 遠心圧縮機、及びギアード遠心圧縮機 |
| CN204755416U (zh) * | 2015-07-29 | 2015-11-11 | 湖北三宁化工股份有限公司 | 气提液涡轮泵 |
| US20170130730A1 (en) * | 2015-11-10 | 2017-05-11 | Onesubsea Ip Uk Limited | Axial bearing offloading in fluid processing machines |
| CN206129676U (zh) * | 2016-08-31 | 2017-04-26 | 天津甘泉集团有限公司 | 一种潜水电泵轴向力平衡装置 |
| EP3412915B1 (en) * | 2017-06-09 | 2019-12-25 | Xylem Europe GmbH | Self-adjusting drum system |
-
2017
- 2017-08-31 US US15/691,899 patent/US10513928B2/en active Active
-
2018
- 2018-07-17 MX MX2020002236A patent/MX2020002236A/es unknown
- 2018-07-17 WO PCT/US2018/042464 patent/WO2019045894A1/en not_active Ceased
- 2018-07-17 BR BR112020002805-3A patent/BR112020002805B1/pt active IP Right Grant
- 2018-07-17 JP JP2020511531A patent/JP6953624B2/ja active Active
- 2018-07-17 CN CN201880052925.7A patent/CN111033053B/zh active Active
- 2018-07-17 KR KR1020207005539A patent/KR102370184B1/ko active Active
- 2018-07-17 EP EP18852610.7A patent/EP3676499B1/en active Active
- 2018-08-30 AR ARP180102467A patent/AR112990A1/es active IP Right Grant
-
2020
- 2020-02-25 SA SA520411411A patent/SA520411411B1/ar unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006077694A (ja) * | 2004-09-10 | 2006-03-23 | Mitsubishi Heavy Ind Ltd | 遠心ポンプ |
| JP2007085223A (ja) * | 2005-09-21 | 2007-04-05 | Mitsubishi Heavy Ind Ltd | 軸スラストのバランス機構 |
| JP2011202641A (ja) * | 2010-03-26 | 2011-10-13 | Honda Motor Co Ltd | 電動圧縮機 |
| JP2014134131A (ja) * | 2013-01-10 | 2014-07-24 | Panasonic Corp | ターボ圧縮機 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102876382B1 (ko) * | 2024-11-22 | 2025-10-27 | 현대중공업터보기계 주식회사 | 축방향추력을 저감하는 밸런싱구조가 적용된 원심펌프 |
Also Published As
| Publication number | Publication date |
|---|---|
| MX2020002236A (es) | 2020-07-20 |
| BR112020002805B1 (pt) | 2023-04-18 |
| AR112990A1 (es) | 2020-01-15 |
| WO2019045894A1 (en) | 2019-03-07 |
| EP3676499A1 (en) | 2020-07-08 |
| CN111033053B (zh) | 2021-06-15 |
| EP3676499B1 (en) | 2022-01-26 |
| BR112020002805A2 (pt) | 2020-07-28 |
| KR102370184B1 (ko) | 2022-03-03 |
| US20190063221A1 (en) | 2019-02-28 |
| SA520411411B1 (ar) | 2022-09-13 |
| EP3676499A4 (en) | 2020-08-12 |
| CN111033053A (zh) | 2020-04-17 |
| US10513928B2 (en) | 2019-12-24 |
| JP2020532673A (ja) | 2020-11-12 |
| JP6953624B2 (ja) | 2021-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102370184B1 (ko) | 축방향 스러스트 밸런싱 디바이스 | |
| US7775763B1 (en) | Centrifugal pump with rotor thrust balancing seal | |
| RU2687474C2 (ru) | Компрессор газотурбинного двигателя, содержащий лопатки с изменяемым углом установки | |
| CN105899763B (zh) | 涡轮机轴承壳 | |
| JP7074442B2 (ja) | 圧縮機 | |
| JP6792086B2 (ja) | ターボコンプレッサ、及び、ターボコンプレッサの動作方法 | |
| US10094388B2 (en) | Load-relieving device | |
| EP0521007A1 (en) | Control system for regulating the axial loading of a rotor of a fluid machine | |
| US20210324862A1 (en) | Centrifugal pump for conveying a fluid | |
| US11572881B2 (en) | Compressor system | |
| US20160327050A1 (en) | Diaphragm and centrifugal rotating machine | |
| US20120051885A1 (en) | Double exhaust centrifugal pump | |
| US20190120056A1 (en) | Radial turbomachine with axial thrust compensation | |
| US20200355219A1 (en) | Tilting pad journal bearing and rotary machine using same | |
| GB2442320A (en) | Pump with axial balancing | |
| KR102240987B1 (ko) | 베어링 장치 및 회전기계 | |
| US10871164B2 (en) | Centrifugal compressor | |
| US11788533B2 (en) | Multistage centrifugal pump | |
| US11971046B2 (en) | Rotary pump for conveying a fluid | |
| US20220042513A1 (en) | A Multistage Pump With Axial Thrust Optimization | |
| KR100917250B1 (ko) | 축추력 자동조절을 위한 벨로우즈장치를 구비한 터보기계 | |
| WO1992019869A1 (en) | Co-planar seal arrangement | |
| EP3936726A1 (en) | Adjusting discharge flow of a multistage pump by setting balance drum clearance | |
| WO2021149244A1 (ja) | ターボチャージャ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |