KR20200040547A - 이동체 - Google Patents
이동체 Download PDFInfo
- Publication number
- KR20200040547A KR20200040547A KR1020180120601A KR20180120601A KR20200040547A KR 20200040547 A KR20200040547 A KR 20200040547A KR 1020180120601 A KR1020180120601 A KR 1020180120601A KR 20180120601 A KR20180120601 A KR 20180120601A KR 20200040547 A KR20200040547 A KR 20200040547A
- Authority
- KR
- South Korea
- Prior art keywords
- wheel
- moving block
- disposed
- manual
- main body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B33/00—Castors in general ; Anti-clogging castors
- B60B33/04—Castors in general ; Anti-clogging castors adjustable, e.g. in height; linearly shifting castors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K7/0007—Disposition of motor in, or adjacent to, traction wheel the motor being electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K2007/0038—Disposition of motor in, or adjacent to, traction wheel the motor moving together with the wheel axle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K7/00—Disposition of motor in, or adjacent to, traction wheel
- B60K2007/0092—Disposition of motor in, or adjacent to, traction wheel the motor axle being coaxial to the wheel axle
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Handcart (AREA)
Abstract
Description
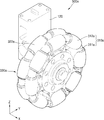
도 2는 도 1에 도시된 휠 조립체를 보여주는 사시도이다.
도 3은 도 2의 Ⅲ-Ⅲ선을 따라 취한 단면도이다.
도 4는 도 2의 Ⅳ-Ⅳ선을 따라 취한 단면도이다.
도 5는 도 1에 도시된 제1 수동휠부를 보여주는 사시도이다.
도 6은 도 1에 도시된 휠 조립체가 지면을 따라 이동하는 모습을 보여주는 측면도이다.
도 7은 도 1에 도시된 이동체가 지면을 이동 시 휠의 운동을 상대적으로 보여주는 정면도이다.
100: 메인바디부
110: 플레이트
120: 서로 연결하는 연결프레임
200: 휠 조립체
210: 휠부
211: 휠
212: 인휠모터
213: 고정축
214: 엔코더
215: 감속기
220: 이동블록
230: 가이드부
240: 복원력제공부
250: 마찰저감부
260: 충격흡수부
270: 거리측정부
300: 수동휠부
Claims (10)
- 메인바디부;
상기 메인바디부에 회전 가능하게 배치되는 제1 수동휠부;
상기 메인바디부에 회전 가능하게 배치되며, 상기 제1 수동휠부로부터 이격되도록 배치된 제2 수동휠부;
상기 제1 수동휠부와 상기 제2 수동휠부 사이에 배치되며, 구동력을 생성하는 휠부;
상기 메인바디부에 고정되는 가이드부;
상기 가이드부에 연결되고, 상기 휠부가 고정되며, 상기 휠부가 접촉하는 면의 굴곡에 따라 상기 가이드부를 선형 운동하는 이동블록; 및
상기 가이드부에 배치되어 상기 이동블록의 운동 시 상기 이동블록에 복원력을 제공하는 복원력제공부;를 포함하는 이동체. - 제 1 항에 있어서,
상기 이동블록과 상기 가이드부 사이에 배치되는 마찰저감부;를 더 포함하는 이동체. - 제 1 항에 있어서,
상기 메인바디부 및 상기 이동블록 중 적어도 하나에 배치되며, 상기 이동블록과 상기 메인바디부 사이에 배치되는 충격흡수부;를 더 포함하는 이동체. - 제 1 항에 있어서,
상기 메인바디부 및 상기 이동블럭 중 적어도 하나에 배치되며, 상기 이동블록과 상기 메인바디부 사이의 거리를 측정하는 거리측정부;를 더 포함하는 이동체. - 제 1 항에 있어서,
상기 가이드부는,
제1 가이드; 및
상기 이동블록의 중심에 대해서 상기 제1 가이드와 대칭되도록 배치되는 제2 가이드;를 포함하는 이동체. - 제 1 항에 있어서,
상기 휠부는,
휠; 및
상기 휠 내부에 배치되는 인휠모터;를 포함하는 이동체. - 제 6 항에 있어서,
상기 인휠모터의 고정자는 상기 이동블록에 연결되며, 상기 인휠모터의 회전자는 상기 휠에 연결되는 이동체. - 제 1 항에 있어서,
상기 제1 수동휠부 및 상기 제2 수동휠부 중 적어도 하나는 수동휠을 포함하고,
상기 수동휠은,
상기 메인바디부에 회전 가능하게 연결되는 수동휠바디부; 및
상기 수동휠바디부의 원주 상에 회전 가능하게 배치되는 회전부;를 포함하는 이동체. - 제 8 항에 있어서,
상기 수동휠은 복수 개 구비되며,
상기 각 수동휠의 회전부는 서로 교차하도록 배치된 이동체. - 메인바디부;
상기 메인바디부에 고정되는 가이드부;
구동력을 생성하는 휠부;
상기 가이드부에 연결되고, 상기 휠부가 고정되며, 상기 휠부가 접촉하는 면의 굴곡에 따라 상기 가이드부를 선형 운동하는 이동블록; 및
상기 가이드부에 배치되어 상기 이동블록의 운동 시 상기 이동블록에 복원력을 제공하는 복원력제공부;를 포함하는 이동체.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180120601A KR102214995B1 (ko) | 2018-10-10 | 2018-10-10 | 이동체 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180120601A KR102214995B1 (ko) | 2018-10-10 | 2018-10-10 | 이동체 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200040547A true KR20200040547A (ko) | 2020-04-20 |
| KR102214995B1 KR102214995B1 (ko) | 2021-02-10 |
Family
ID=70467409
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180120601A Active KR102214995B1 (ko) | 2018-10-10 | 2018-10-10 | 이동체 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102214995B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023286961A1 (ko) * | 2021-07-16 | 2023-01-19 | 네이버랩스 주식회사 | 이동체 |
| KR20240069245A (ko) * | 2022-11-11 | 2024-05-20 | 세메스 주식회사 | 주행장치 및 그 운용방법 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100224427A1 (en) * | 2007-04-04 | 2010-09-09 | Nuechter Elmar | Omnidirectional vehicle, driving module, and mobile industrial robot |
| JP2010269745A (ja) * | 2009-05-22 | 2010-12-02 | Kokuyo Co Ltd | キャスタ及びキャスタを備えた家具 |
| KR20110067272A (ko) * | 2009-12-14 | 2011-06-22 | 김명국 | 바퀴 구조체 |
| JP2012116336A (ja) * | 2010-11-30 | 2012-06-21 | Nansin Co Ltd | 緩衝機構を有するキャスタ |
| US20130020775A1 (en) * | 2011-06-23 | 2013-01-24 | Haulotte Group | Half axle, and vehicle comprising at least one such half axle |
| KR20130130210A (ko) * | 2012-03-28 | 2013-12-02 | (주)동부로봇 | 지면 상태 인지가 가능한 로봇청소기와 이를 이용한 지면 상태 인지방법 및 로봇 청소기 제어방법 |
| KR101509083B1 (ko) * | 2013-12-04 | 2015-04-07 | 한국생산기술연구원 | 무게중심상에 주행보조바퀴를 구비한 이동식 리프팅장치 |
| KR20170001480A (ko) * | 2015-06-26 | 2017-01-04 | 주식회사 마루이엔지 | 방열 기능을 갖는 바퀴가 구비된 전동 스쿠터 |
-
2018
- 2018-10-10 KR KR1020180120601A patent/KR102214995B1/ko active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100224427A1 (en) * | 2007-04-04 | 2010-09-09 | Nuechter Elmar | Omnidirectional vehicle, driving module, and mobile industrial robot |
| JP2010269745A (ja) * | 2009-05-22 | 2010-12-02 | Kokuyo Co Ltd | キャスタ及びキャスタを備えた家具 |
| KR20110067272A (ko) * | 2009-12-14 | 2011-06-22 | 김명국 | 바퀴 구조체 |
| JP2012116336A (ja) * | 2010-11-30 | 2012-06-21 | Nansin Co Ltd | 緩衝機構を有するキャスタ |
| US20130020775A1 (en) * | 2011-06-23 | 2013-01-24 | Haulotte Group | Half axle, and vehicle comprising at least one such half axle |
| KR20130130210A (ko) * | 2012-03-28 | 2013-12-02 | (주)동부로봇 | 지면 상태 인지가 가능한 로봇청소기와 이를 이용한 지면 상태 인지방법 및 로봇 청소기 제어방법 |
| KR101509083B1 (ko) * | 2013-12-04 | 2015-04-07 | 한국생산기술연구원 | 무게중심상에 주행보조바퀴를 구비한 이동식 리프팅장치 |
| KR20170001480A (ko) * | 2015-06-26 | 2017-01-04 | 주식회사 마루이엔지 | 방열 기능을 갖는 바퀴가 구비된 전동 스쿠터 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023286961A1 (ko) * | 2021-07-16 | 2023-01-19 | 네이버랩스 주식회사 | 이동체 |
| KR20230012883A (ko) * | 2021-07-16 | 2023-01-26 | 네이버랩스 주식회사 | 이동체 |
| KR20240069245A (ko) * | 2022-11-11 | 2024-05-20 | 세메스 주식회사 | 주행장치 및 그 운용방법 |
| US12304265B2 (en) | 2022-11-11 | 2025-05-20 | Semes Co., Ltd. | Driving apparatus and operation method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102214995B1 (ko) | 2021-02-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102197062B1 (ko) | 이동 장치 | |
| JP4721461B2 (ja) | 走行用リンク型ダブルトラック装置 | |
| US9056746B2 (en) | Adaptable vehicle | |
| CN110667723A (zh) | 仿生式全地形机器人 | |
| KR101577942B1 (ko) | 코일스프링 보호튜브 조립장치 | |
| KR20200040547A (ko) | 이동체 | |
| KR20050015018A (ko) | 이동로봇 | |
| KR20110132745A (ko) | 구형로봇 | |
| CN201313307Y (zh) | 环境探测球形机器人 | |
| JP2005342818A (ja) | 一足球体輪移動ロボット | |
| CN107054487B (zh) | 一种球形机器人 | |
| KR20190062014A (ko) | 이동식 용접장치 및 그 제어방법 | |
| KR102135838B1 (ko) | 이동체 | |
| KR102649353B1 (ko) | 이동체 | |
| KR20200040546A (ko) | 바퀴 어셈블리 | |
| KR101886843B1 (ko) | 가변형 휠을 이용한 안전진단장치 | |
| JP5145505B2 (ja) | 対向面間の走行装置 | |
| US10787082B2 (en) | Wheel suspension of an electrical drive for supporting a manual movement impulse | |
| KR102009779B1 (ko) | 자율주행기계 시험용 주행환경 제공장치 및 이의 제어방법 | |
| KR102333061B1 (ko) | 이동 로봇 | |
| CN217201927U (zh) | 一种具有多自由度调姿功能的agv小车 | |
| CN107128381B (zh) | 一种球形机器人 | |
| WO2019045065A1 (ja) | 連結可能な走行車両 | |
| CN210680974U (zh) | 一种爬壁机器人 | |
| CN116371780A (zh) | 清扫机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| X091 | Application refused [patent] | ||
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R14-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |