KR20200041017A - 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치 - Google Patents
선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치 Download PDFInfo
- Publication number
- KR20200041017A KR20200041017A KR1020180120879A KR20180120879A KR20200041017A KR 20200041017 A KR20200041017 A KR 20200041017A KR 1020180120879 A KR1020180120879 A KR 1020180120879A KR 20180120879 A KR20180120879 A KR 20180120879A KR 20200041017 A KR20200041017 A KR 20200041017A
- Authority
- KR
- South Korea
- Prior art keywords
- fixed
- tool
- industrial robot
- main body
- working body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/04—Gripping heads and other end effectors with provision for the remote detachment or exchange of the head or parts thereof
- B25J15/0408—Connections means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Description
도 2는 본 발명의 바람직한 실시 예를 나타내는 정단면도
도 3은 본 발명의 바람직한 실시 예를 나타내는 분해도
도 4는 본 발명의 툴마스터의 바람직한 실시 예를 나타내는 분해도
도 5는 본 발명의 툴마스터의 바람직한 실시 예를 나타내는 분해도
도 6은 본 발명의 툴마스터의 바람직한 실시 예를 나타내는 작동상태도
도 7은 본 발명의 툴슬레이브의 바람직한 실시 예를 나타내는 분해도
도 8은 본 발명의 바람직한 실시 예를 나타내는 사용상태도, 확대도
도 9는 본 발명의 바람직한 실시 예를 나타내는 사용상태도, 확대도
도 10은 본 발명의 바람직한 실시 예를 나타내는 사용상태도
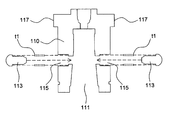
110 : 메인몸체 111 : 끼움홈 113 : 고정돌기
115 : 이동홈 117 : 걸림턱
120 : 작동몸체 121 : 밀림턱
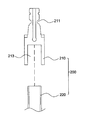
200 : 툴슬레이브
210 : 고정뭉치 211 : 고정홈 213 : 결합홈
220 : 장착툴
300 : 고정부재
Claims (5)
- 일측이 산업용 로봇의 아암(10)에 장착되고, 타측이 가공대상물을 흡착 이송시키도록 구성되는 산업용 로봇 툴장치에 있어서,
상기 아암(10)에 장착되되, 상기 아암(10)과 장착되는 타측에 장착툴(220)을 고정하는 고정뭉치(210)가 끼움되는 끼움홈(111)이 형성되고, 내부에 상기 끼움홈(111)측 방향으로 작동몸체(120)의 작동에 의해 밀림되는 고정돌기(113)가 형성되는 메인몸체(110)와, 상기 메인몸체(110)의 외주에 결합 구성되되 선택적으로 상기 메인몸체(110)에서 왕복운동을 하고, 내측이 상기 고정돌기(113)와 맞닿게 형성되는 밀림턱(121)이 형성되는 작동몸체(120)로 구성되는 툴마스터(100);
일측이 상기 메인몸체(110)의 끼움홈(111)에 끼워져 상기 작동몸체(120)의 작동에 따라 고정돌기(113)에 의해 고정되는 고정뭉치(210)와, 일측이 상기 끼움홈(111)에 끼워지는 고정뭉치(210)의 타측에 결합되어 흡착패드 또는 가공대상물을 흡착하는 장착툴(220)로 구성되는 툴슬레이브(200); 로 구성되는 것을 특징으로 하는 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치.
- 제 1항에 있어서,
상기 메인몸체(110)는 상기 고정돌기(113)가 이동하기 위한 이동홈(115)이 상기 끼움홈(111)과 연장되게 형성되며,
상기 아암(10)과 결합되는 외주에는 상기 작동몸체(120)의 밀림턱(121)의 일측과 맞닿아 작동몸체(120)의 이동을 제한하는 걸림턱(117)이 형성되고,
상기 작동몸체(120)는 밀림턱(121)은 상기 걸림턱(117)과 맞닿는 타측은 상기 고정돌기(113)의 원활한 밀림을 위해 경사지도록 형성되며,
상기 툴슬레이브(200)의 고정뭉치(210)의 외주에는 상기 고정돌기(113)가 인입되고 고정하는 고정홈(211)이 형성되는 것을 특징으로 하는 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치.
- 제 2항에 있어서,
상기 이동홈(115)은 메인몸체(110)의 내부에 일정간격 이격되게 다수개로 형성되며 각각의 이동홈(115)에 고정돌기(113)가 각각 구성되며,
상기 고정홈(211)은 일정간격 이격되게 다수개 또는 상기 고정뭉치(210)의 외주에 연장되게 형성되는 것을 하는 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치.
- 제 2항에 있어서,
상기 걸림턱(117)과 밀림턱(121)의 사이 및 상기 이동홈(115)과 고정돌기(113)의 사이에는 상기 작동몸체(120)와 고정돌기(113)가 원래의 상태로 복원될 수 있도록 탄성부재(t)가 구성되는 것을 특징으로 하는 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치.
- 제 1항에 있어서,
상기 아암(10)과 결착되는 메인몸체(110)의 타측에는 외주를 감싸는 작동몸체(120)의 이탈을 방지하기 위한 고정부재(300)가 구성되는 것을 특징으로 하는 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180120879A KR102157422B1 (ko) | 2018-10-11 | 2018-10-11 | 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180120879A KR102157422B1 (ko) | 2018-10-11 | 2018-10-11 | 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200041017A true KR20200041017A (ko) | 2020-04-21 |
| KR102157422B1 KR102157422B1 (ko) | 2020-09-17 |
Family
ID=70456345
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180120879A Active KR102157422B1 (ko) | 2018-10-11 | 2018-10-11 | 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102157422B1 (ko) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0775906A (ja) * | 1993-09-09 | 1995-03-20 | Mishima Kosan Co Ltd | 自動工具交換装置 |
| JPH0811075A (ja) * | 1994-06-29 | 1996-01-16 | Olympus Optical Co Ltd | ロボットハンドのツールアダプタ取付機構 |
| KR101036197B1 (ko) * | 2010-11-08 | 2011-05-23 | 주식회사 월드이엔지 | 다관절로봇의 장착툴 락킹구조 |
| KR101566624B1 (ko) * | 2014-06-30 | 2015-11-06 | 강남균 | 이송로봇용 그리퍼 연결장치 |
| KR20170052784A (ko) * | 2015-11-04 | 2017-05-15 | 주식회사 새한산업 | 그립퍼 자동 교환 장치 |
| KR20190142722A (ko) * | 2018-06-18 | 2019-12-27 | 에펙토 그룹 에스.피.에이. | 로봇 암을 위한 공구 교환 장치 |
-
2018
- 2018-10-11 KR KR1020180120879A patent/KR102157422B1/ko active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0775906A (ja) * | 1993-09-09 | 1995-03-20 | Mishima Kosan Co Ltd | 自動工具交換装置 |
| JPH0811075A (ja) * | 1994-06-29 | 1996-01-16 | Olympus Optical Co Ltd | ロボットハンドのツールアダプタ取付機構 |
| KR101036197B1 (ko) * | 2010-11-08 | 2011-05-23 | 주식회사 월드이엔지 | 다관절로봇의 장착툴 락킹구조 |
| KR101566624B1 (ko) * | 2014-06-30 | 2015-11-06 | 강남균 | 이송로봇용 그리퍼 연결장치 |
| KR20170052784A (ko) * | 2015-11-04 | 2017-05-15 | 주식회사 새한산업 | 그립퍼 자동 교환 장치 |
| KR20190142722A (ko) * | 2018-06-18 | 2019-12-27 | 에펙토 그룹 에스.피.에이. | 로봇 암을 위한 공구 교환 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102157422B1 (ko) | 2020-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI584923B (zh) | 末端執行器、產業用機器人、及其運轉方法 | |
| US9266242B2 (en) | Gripper | |
| JP2015196220A (ja) | クランプ装置 | |
| CN105098489A (zh) | 一种可移动式建筑机械的电源线连接锁定装置 | |
| US8960057B2 (en) | C-type pliers | |
| CN105186218A (zh) | 一种防超程的建筑机械的电源线连接锁定装置 | |
| KR102282818B1 (ko) | 파지 장치 | |
| US20170197317A1 (en) | Gripping Jaw Safety Device With Tongue And Groove For HRC | |
| KR102470950B1 (ko) | 로보트용 그리퍼 | |
| KR20200041017A (ko) | 선택적인 교체가 가능한 산업용 로봇에 장착되는 수동식 툴장치 | |
| CN103465200A (zh) | 一种夹紧装置 | |
| JP6032694B2 (ja) | 加圧工具およびロッキングボルト | |
| US11389970B2 (en) | Tool adapter for manipulating commercial tools with a robot hand | |
| US20160101510A1 (en) | Integrated wrench structure for preventing departed workpieces | |
| KR102185161B1 (ko) | 수동겸용 유압바이스 | |
| KR101716095B1 (ko) | 핀 터미널 압착기 | |
| JP5660230B2 (ja) | 切削工具及び該切削工具に用いられる切削インサートのクランプ機構のための回転部材 | |
| US9408427B2 (en) | Snap installation tool adaptor | |
| CN203510003U (zh) | 一种夹紧装置 | |
| KR101346839B1 (ko) | 클램프 | |
| KR100963870B1 (ko) | 로봇 헤드와 그리퍼를 연결고정시키는 연결체 | |
| KR101642835B1 (ko) | 수동식 차량시트 고정장치 | |
| JP7422351B2 (ja) | スリーブ圧縮装置、および、スリーブ圧縮方法 | |
| US20160016221A1 (en) | Matrix for making clinch-type joints between sheet-formed members and an apparatus including such a matrix | |
| DE502007001912D1 (de) | Akkubetriebenes Elektrohandwerkzeuggerät |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20181011 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200429 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20200731 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20200911 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20200911 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20240804 Start annual number: 5 End annual number: 5 |