KR20200041322A - 힘 검출 센서 - Google Patents
힘 검출 센서 Download PDFInfo
- Publication number
- KR20200041322A KR20200041322A KR1020207004831A KR20207004831A KR20200041322A KR 20200041322 A KR20200041322 A KR 20200041322A KR 1020207004831 A KR1020207004831 A KR 1020207004831A KR 20207004831 A KR20207004831 A KR 20207004831A KR 20200041322 A KR20200041322 A KR 20200041322A
- Authority
- KR
- South Korea
- Prior art keywords
- sensor
- input force
- contact element
- detecting
- cavity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/22—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
- G01L5/223—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers to joystick controls
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0414—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using force sensing means to determine a position
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K17/00—Electronic switching or gating, i.e. not by contact-making and –breaking
- H03K17/94—Electronic switching or gating, i.e. not by contact-making and –breaking characterised by the way in which the control signals are generated
- H03K17/96—Touch switches
- H03K17/9625—Touch switches using a force resistance transducer
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Position Input By Displaying (AREA)
Abstract
Description
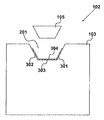
도 1은 입력 힘을 검출할 수 있는 센서를 도시한다.
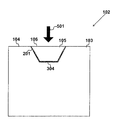
도 2는 도 1의 센서의 개략도를 도시한다.
도 3은 도 1 및 2의 센서의 개략적인 단면도를 도시한다.
도 4는 이전에 설명된 센서의 사용을 위한 예시적인 센싱 장치를 도시한다.
도 5는 도 1의 센서의 측단면도를 도시한다.
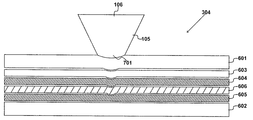
도 6은 센싱 장치를 구성하는 복수의 층의 개략적인 단면도를 도시한다.
도 7은 기계적인 상호작용에 응답하는 도 6의 복수의 층을 도시한다.
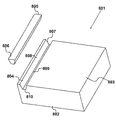
도 8은 입력 힘을 검출하기 위한 센서의 대안적인 실시예를 도시한다.
도 9는 전자 장치에 활용되는 도 8의 센서를 도시한다.
도 10은 차량의 범퍼의 센서를 포함하는 차량을 도시한다.
Claims (20)
- 입력 힘을 검출하기 위한 센서로서,
내부의 공동 및 상부 표면을 한정하는 하우징; 및
상기 공동에 의해 둘러싸이며 외부 표면을 포함하는 접촉 요소;를 포함하며,
상기 공동은 내부 표면을 갖는 적어도 하나의 벽을 포함하며, 상기 적어도 하나의 벽은, 상기 적어도 하나의 벽의 상기 내부 표면에 대해 정렬되고 그에 부착되는 감지 장치를 가지며,
상기 접촉 요소는 상기 외부 표면에 기계적 상호작용의 인가 시 상기 접촉 요소 및 상기 감지 장치 사이에 물리적 접촉을 제공하도록 구성되며,
상기 외부 표면 및 상기 상부 표면은 상기 외부 표면으로부터 상기 상부 표면으로 연장하는 실질적으로 수평인 프로파일을 제공하는,
입력 힘을 검출하기 위한 센서. - 제1항에 있어서,
상기 감지 장치는 인가될 때 기계적 상호작용의 크기 및 위치를 검출하도록 구성되는,
입력 힘을 검출하기 위한 센서. - 제2항에 있어서,
상기 감지 장치는 3차원 데카르트 축으로 크기 및 위치를 검출하도록 구성되는,
입력 힘을 검출하기 위한 센서. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 감지 장치는 단일 포인트 압력 센서인,
입력 힘을 검출하기 위한 센서. - 제4항에 있어서,
상기 단일 포인트 압력 센서는 퀀텀 터널링 복합 재료를 포함하는,
입력 힘을 검출하기 위한 센서. - 제1항 내지 제5항 중 어느 한 항에 있어서,
상기 공동은 4개의 측벽 및 하부벽을 포함하며, 각각의 상기 벽은 이에 부착된 하나의 상기 감지 장치를 갖는,
입력 힘을 검출하기 위한 센서. - 제1항 내지 제5항 중 어느 한 항에 있어서,
상기 공동은 2 개의 종방향 측벽 및 하부벽을 갖는 세장형 채널을 포함하며, 상기 종방향 측벽 및 상기 하부벽 각각은 하나의 상기 감지 장치를 포함하는,
입력 힘을 검출하기 위한 센서. - 제1항 내지 제7항 중 어느 한 항에 있어서,
상기 접촉 요소 및 상기 공동 각각은 상호 협력 프로파일을 갖는,
입력 힘을 검출하기 위한 센서. - 제1항 내지 제8항 중 어느 한 항에 있어서,
상기 접촉 요소는 v-형 단면 프로파일을 포함하는,
입력 힘을 검출하기 위한 센서. - 제1항 내지 제9항 중 어느 한 항에 있어서,
상기 접촉 요소는 엘라스토머 재료를 포함하는,
입력 힘을 검출하기 위한 센서. - 제1항 내지 제10항 중 어느 한 항에 있어서,
상기 외부 표면은 손가락 형상 프로파일을 포함하는 성형 부분을 포함하는,
입력 힘을 검출하기 위한 센서. - 제1항 내지 제11항 중 어느 한 항에 있어서,
상기 센서는 외부 물체를 검출함으로써 보호 범퍼를 제공하도록 구성되는,
입력 힘을 검출하기 위한 센서. - 입력 힘을 검출하기 위한 방법으로서,
내부에 공동을 한정하는 하우징 및 상기 공동에 의해 둘러싸인 접촉 요소를 갖는 센서를 제공하는 단계;
상기 접촉 요소의 외부 표면에 기계적 상호작용을 인가하는 단계 ― 상기 외부 표면 및 상기 하우징의 상부 표면은 상기 외부 표면으로부터 상기 상부 표면으로 연장하는 실질적으로 수평인 프로파일을 제공함 ―;
상기 접촉 요소 및 상기 공동의 측벽의 내부 표면에 대해 정렬되고 그에 부착되는 감지 장치 사이에 물리적 접촉을 제공하는 단계; 및
상기 물리적 접촉에 응답하여 상기 기계적 상호작용의 특성을 검출하는 단계;를 포함하는,
입력 힘을 검출하기 위한 방법. - 제13항에 있어서,
기계적 상호작용의 상기 특성은 3 개의 축을 따른 힘의 위치 및 힘 크기를 포함하는,
입력 힘을 검출하기 위한 방법. - 제13항 또는 제14항에 있어서,
보호 범퍼를 제공하기 위해 상기 센서와 접촉하는 외부 물체를 검출하는 단계를 더 포함하는,
입력 힘을 검출하기 위한 방법. - 제13항 또는 제14항에 있어서,
상기 기계적 상호작용을 인가하는 단계는 상기 외부 표면을 따라 슬라이딩 힘을 제공하는 단계를 포함하는,
입력 힘을 검출하기 위한 방법. - 제13항 또는 제14항에 있어서,
상기 기계적 상호작용을 인가하는 단계는 상기 외부 표면을 따라 토글 기능을 제공하는 단계를 포함하는,
입력 힘을 검출하기 위한 방법. - 입력 힘을 검출하기 위한 센서를 제조하는 방법으로서,
상부 표면을 갖는 하우징을 제조하는 단계;
적어도 하나의 벽을 포함하는 공동을 갖는 상기 하우징을 제공하는 단계;
상기 적어도 하나의 벽의 내부 표면에 대해 감지 장치를 정렬시키는 단계;
상기 적어도 하나의 벽의 상기 내부 표면에 상기 감지 장치를 부착시키는 단계; 및
접촉 요소가 상기 공동에 의해 둘러싸이고 상기 접촉 요소의 외부 표면 및 상기 상부 표면이 상기 외부 표면으로부터 상기 상부 표면으로 연장하는 실질적으로 수평인 프로파일을 제공하도록 상기 공동 내에 접촉 요소를 위치시키는 단계;를 포함하며,
상기 접촉 요소는 상기 외부 표면으로 기계적 상호작용의 인가 시 상기 접촉 요소와 상기 감지 장치 사이에 물리적 접촉을 제공할 수 있는,
입력 힘을 검출하기 위한 센서를 제조하는 방법. - 제18항에 있어서,
상기 공동 내에 상기 접촉 요소를 위치시키는 단계에서, 상기 접촉 요소는 상기 공동과 상호 협력하도록 위치되는,
입력 힘을 검출하기 위한 센서를 제조하는 방법. - 제19항에 있어서,
상기 접촉 요소는 v-형 단면 프로파일을 갖도록 제조되는,
입력 힘을 검출하기 위한 센서를 제조하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1713123.6A GB2565564B (en) | 2017-08-16 | 2017-08-16 | Detecting force |
| GB1713123.6 | 2017-08-16 | ||
| PCT/GB2018/000113 WO2019034828A1 (en) | 2017-08-16 | 2018-08-15 | Force detecting sensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200041322A true KR20200041322A (ko) | 2020-04-21 |
| KR102544697B1 KR102544697B1 (ko) | 2023-06-15 |
Family
ID=59896111
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207004831A Active KR102544697B1 (ko) | 2017-08-16 | 2018-08-15 | 힘 검출 센서 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11385114B2 (ko) |
| EP (1) | EP3669152B1 (ko) |
| JP (1) | JP2021509168A (ko) |
| KR (1) | KR102544697B1 (ko) |
| CN (1) | CN111051837A (ko) |
| GB (1) | GB2565564B (ko) |
| WO (1) | WO2019034828A1 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2584387B (en) * | 2019-03-21 | 2022-12-14 | Equinor Energy As | FIV reducing device with automated control of natural frequency |
| GB201910563D0 (en) * | 2019-07-24 | 2019-09-04 | Hussein Zakareya Elmo | A compliant tri-axial force sensor and method of fabricating the same |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020180620A1 (en) * | 2001-05-30 | 2002-12-05 | Gettemy Shawn R. | Three-dimensional contact-sensitive feature for electronic devices |
| US20160282999A1 (en) * | 2015-03-23 | 2016-09-29 | Lg Display Co., Ltd. | Touch screen device and method for driving thereof, and portable electronic device comprising the same |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5828635A (ja) * | 1981-08-12 | 1983-02-19 | Sharp Corp | 圧力センサ |
| JPS61122539A (ja) * | 1984-11-20 | 1986-06-10 | Matsushita Electric Ind Co Ltd | 力覚センサ− |
| US4682503A (en) | 1986-05-16 | 1987-07-28 | Honeywell Inc. | Microscopic size, thermal conductivity type, air or gas absolute pressure sensor |
| JPS6389282A (ja) * | 1986-09-30 | 1988-04-20 | 株式会社東芝 | 触覚センサ |
| US5046972A (en) * | 1990-07-11 | 1991-09-10 | Amp Incorporated | Low insertion force connector and contact |
| JPH0546634U (ja) * | 1991-11-29 | 1993-06-22 | 株式会社東京センサ | 物体の接触検出装置 |
| US5632854A (en) | 1995-08-21 | 1997-05-27 | Motorola, Inc. | Pressure sensor method of fabrication |
| JP3829357B2 (ja) * | 1996-04-18 | 2006-10-04 | 学校法人トヨタ学園 | 触覚センサ |
| TW476428U (en) * | 1999-06-25 | 2002-02-11 | Darfon Electronics Corp | Pointer stick structure with key-in function |
| US6951143B1 (en) * | 2000-11-28 | 2005-10-04 | Michelin Recherche Et Technique S.A. | Three-axis sensor assembly for use in an elastomeric material |
| JP3479064B1 (ja) * | 2002-04-12 | 2003-12-15 | 北陸電気工業株式会社 | 半導体力センサ |
| DE10334458A1 (de) * | 2003-07-29 | 2005-03-03 | Weiss, Karsten | Vorrichtung zur Messung räumlicher Kraftprofile |
| JP3715294B2 (ja) * | 2003-09-16 | 2005-11-09 | 独立行政法人科学技術振興機構 | 2次元分布型力センサ装置 |
| US7590269B2 (en) * | 2005-04-22 | 2009-09-15 | Microsoft Corporation | Integrated control for navigation, authentication, power on and rotation |
| JP2007192577A (ja) * | 2006-01-17 | 2007-08-02 | Denso Corp | 車両用衝突物体判別装置 |
| US7677080B2 (en) * | 2006-02-02 | 2010-03-16 | Ford Global Technologies, Llc | Dual mode contact sensor for automotive vehicle |
| JP4904221B2 (ja) * | 2007-08-08 | 2012-03-28 | 本田技研工業株式会社 | センサ組立体 |
| JP5710859B2 (ja) * | 2007-09-21 | 2015-04-30 | ソニー株式会社 | 入力装置及び電子機器 |
| US7765880B2 (en) * | 2008-05-19 | 2010-08-03 | Hong Kong Polytechnic University | Flexible piezoresistive interfacial shear and normal force sensor and sensor array |
| GB2468870B (en) * | 2009-03-25 | 2016-08-03 | Peratech Holdco Ltd | Sensor |
| JP5267504B2 (ja) * | 2009-05-19 | 2013-08-21 | ミツミ電機株式会社 | 操作入力装置及び操作入力検出装置 |
| JP5126215B2 (ja) * | 2009-12-25 | 2013-01-23 | ソニー株式会社 | 入力装置および電子機器 |
| CN103119410B (zh) * | 2010-06-15 | 2015-04-22 | 艾托有限公司 | 用于检测人的手指在表面上的存在的装置及应用其的方法 |
| US8951781B2 (en) * | 2011-01-10 | 2015-02-10 | Illumina, Inc. | Systems, methods, and apparatuses to image a sample for biological or chemical analysis |
| JP2013064681A (ja) * | 2011-09-20 | 2013-04-11 | Seiko Epson Corp | 検出装置、電子機器、及びロボット |
| JP5880935B2 (ja) * | 2011-12-20 | 2016-03-09 | セイコーエプソン株式会社 | センサーデバイス、センサーモジュール、ロボット、センサーデバイスの製造方法 |
| TW201335801A (zh) * | 2012-02-17 | 2013-09-01 | Primax Electronics Ltd | 應用於輸入裝置之滾輪模組 |
| US9003899B2 (en) * | 2012-03-23 | 2015-04-14 | Honeywell International Inc. | Force sensor |
| US9625333B2 (en) * | 2013-03-15 | 2017-04-18 | President And Fellows Of Harvard College | Tactile sensor |
| JP2015045552A (ja) * | 2013-08-28 | 2015-03-12 | 住友理工株式会社 | 触覚センサ |
| EP3581136B1 (en) * | 2013-12-12 | 2021-05-26 | St. Jude Medical, Cardiology Division, Inc. | Medical device with contact force sensing tip |
| CN104714663A (zh) * | 2013-12-16 | 2015-06-17 | 致伸科技股份有限公司 | 输入装置 |
| JP6034818B2 (ja) | 2014-03-04 | 2016-11-30 | アズビル株式会社 | 圧力センサチップ |
| WO2016079857A1 (ja) * | 2014-11-20 | 2016-05-26 | パイオニア株式会社 | 入力機器 |
| JP2016206007A (ja) * | 2015-04-22 | 2016-12-08 | 矢崎総業株式会社 | 荷重検出装置 |
| WO2016204568A1 (ko) * | 2015-06-18 | 2016-12-22 | 삼성전자 주식회사 | 입력장치를 구비한 전자장치 |
| KR102163052B1 (ko) | 2015-06-30 | 2020-10-08 | 삼성전기주식회사 | 압력 센서 소자 및 그 제조 방법 |
| KR101726066B1 (ko) * | 2015-08-13 | 2017-04-12 | 성균관대학교산학협력단 | 힘측정이 가능한 디지털 타입 센서 |
| TWI615875B (zh) * | 2017-01-06 | 2018-02-21 | 致伸科技股份有限公司 | 薄型按鍵結構 |
| US11426318B2 (en) * | 2020-05-20 | 2022-08-30 | Augustine Biomedical + Design, LLC | Medical module including automated dose-response record system |
| KR101931979B1 (ko) * | 2018-05-14 | 2018-12-24 | (주)유창 | 비정형 곡면패널 성형장치 및 이를 이용한 비정형 곡면패널 성형방법 |
-
2017
- 2017-08-16 GB GB1713123.6A patent/GB2565564B/en active Active
-
2018
- 2018-08-15 EP EP18759663.0A patent/EP3669152B1/en active Active
- 2018-08-15 US US16/638,302 patent/US11385114B2/en active Active
- 2018-08-15 KR KR1020207004831A patent/KR102544697B1/ko active Active
- 2018-08-15 CN CN201880052690.1A patent/CN111051837A/zh active Pending
- 2018-08-15 WO PCT/GB2018/000113 patent/WO2019034828A1/en not_active Ceased
- 2018-08-15 JP JP2020508314A patent/JP2021509168A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020180620A1 (en) * | 2001-05-30 | 2002-12-05 | Gettemy Shawn R. | Three-dimensional contact-sensitive feature for electronic devices |
| US20160282999A1 (en) * | 2015-03-23 | 2016-09-29 | Lg Display Co., Ltd. | Touch screen device and method for driving thereof, and portable electronic device comprising the same |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3669152A1 (en) | 2020-06-24 |
| GB2565564B (en) | 2020-04-08 |
| JP2021509168A (ja) | 2021-03-18 |
| WO2019034828A1 (en) | 2019-02-21 |
| GB2565564A (en) | 2019-02-20 |
| US20200225102A1 (en) | 2020-07-16 |
| CN111051837A (zh) | 2020-04-21 |
| KR102544697B1 (ko) | 2023-06-15 |
| GB201713123D0 (en) | 2017-09-27 |
| EP3669152B1 (en) | 2025-12-03 |
| US11385114B2 (en) | 2022-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10032592B2 (en) | Force sensing switch | |
| JP5446626B2 (ja) | センサ装置及び情報処理装置 | |
| US11610476B2 (en) | Remote control device | |
| US20140374230A1 (en) | Pressure sensitive keys with a single-sided direct conduction sensor | |
| US10639543B2 (en) | Handheld controllers with touch-sensitive controls | |
| US9298324B1 (en) | Capacitive touch with tactile feedback | |
| CN105009051A (zh) | 使用电容传感器的剪力检测 | |
| KR102404608B1 (ko) | 회로 보드 내의 터치 입력 디바이스 | |
| KR102544697B1 (ko) | 힘 검출 센서 | |
| JP6132817B2 (ja) | 入力デバイス | |
| US10191600B2 (en) | Device with mechanical keys and capacitance measurement | |
| JP6546778B2 (ja) | 接触検知キーパッド制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200219 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210729 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20221012 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20230404 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20230613 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20230613 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |