KR20200047501A - Apparatus and method for controlling speed in cacc system - Google Patents
Apparatus and method for controlling speed in cacc system Download PDFInfo
- Publication number
- KR20200047501A KR20200047501A KR1020200051571A KR20200051571A KR20200047501A KR 20200047501 A KR20200047501 A KR 20200047501A KR 1020200051571 A KR1020200051571 A KR 1020200051571A KR 20200051571 A KR20200051571 A KR 20200051571A KR 20200047501 A KR20200047501 A KR 20200047501A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- information
- driving
- speed
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/072—Curvature of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B60W2420/52—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4042—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0605—Throttle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
본 발명은 V2X(Vehicle to Everything) 통신을 이용하여 획득한 동일 차선을 주행하는 복수의 선행차량에 대한 정보를 바탕으로 차량의 속도를 제어하는 장치 및 방법에 관한 것으로, 개시된 자차량에 구비되고 자차량의 주행 속도를 제어하는 협조 적응 순항 제어(Cooperative Adaptive Cruise Control; 이하 CACC) 시스템은 주변차량들로부터 위치 및 주행정보를 포함하는 차량정보를 수신하는 통신부, 자차량에 구비된 센서들을 이용하여 주변 차량의 차량 정보 및 상기 자차량의 차량정보를 수집하는 정보수집부, 상기 자차량에 구비된 센서들을 이용하여 선행차량 및 선선행차량을 결정하고, 상기 선행차량 및 선선행차량의 차량정보와 통신부에서 획득한 주변차량들의 차량정보를 바탕으로 상기 자차량이 추종하기 위한 목표차량(이하 제1 목표차량) 및 상기 목표차량이 추종하는 목표차량(이하 제2 목표차량)을 선정하고, 선정된 상기 제1 목표차량 및 제2 목표차량의 속도정보를 바탕으로 상기 자차량의 주행 속도를 제어하는 제어부를 포함할 수 있다.
본 발명은 제1 목표차량 및 제2 목표차량의 주행정보를 이용하여 자차량의 주행 속도를 결정함으로써 운전자에게 안전한 주행 환경을 제공할 수 있다.The present invention relates to an apparatus and a method for controlling the speed of a vehicle based on information on a plurality of preceding vehicles driving in the same lane obtained using V2X (Vehicle to Everything) communication. A cooperative adaptive cruise control (CACC) system that controls a vehicle's driving speed is a communication unit that receives vehicle information, including location and driving information, from surrounding vehicles, and uses sensors provided in the host vehicle. An information collecting unit that collects vehicle information of the vehicle and vehicle information of the host vehicle, determines a preceding vehicle and a preceding vehicle using sensors provided in the host vehicle, and communicates vehicle information and communication units of the preceding vehicle and the preceding vehicle The target vehicle (hereinafter referred to as the first target vehicle) and the target vehicle for following the own vehicle based on the vehicle information of the surrounding vehicles acquired in To follow the target vehicle may comprise a controller for selecting (the second target vehicle), and controls the running speed of the self-vehicle based on the velocity information of the selected first target vehicle and the second target vehicle.
The present invention can provide a safe driving environment for the driver by determining the driving speed of the host vehicle using the driving information of the first target vehicle and the second target vehicle.
Description
본 발명은 협조 적응형 순항 제어(Cooperative Adaptive Cruise Control; 이하 CACC) 시스템에서 속도 제어 장치 및 방법에 관한 것으로, 더욱 상세하게는 V2X(Vehicle to Everything) 통신을 이용하여 획득한 동일 차선을 주행하는 복수의 선행차량에 대한 정보를 바탕으로 차량의 속도를 제어하는 장치 및 방법에 관한 것이다.The present invention relates to a speed control device and method in a cooperative adaptive cruise control (CACC) system, and more specifically, a plurality of vehicles traveling in the same lane obtained using V2X (Vehicle to Everything) communication It relates to an apparatus and method for controlling the speed of the vehicle based on the information on the preceding vehicle.
적응형 순항 제어 (Adaptive Cruise Control; 이하 ACC) 시스템은 운전자가 설정한 속도 이하로 자동 운행하되, 목표차량과의 차간 거리를 일정 거리 이상으로 유지시켜 주는 시스템으로서, 차량에 장착된 거리 및/또는 위치 측정 센서에 의하여 획득한 전방의 목표차량과 충돌을 방지할 수 있는 간격을 유지하도록 하는 추종 기능을 제공하거나 또는 운전자가 설정한 속도로 자동 주행하는 크루즈 기능을 제공한다. The adaptive cruise control (ACC) system is a system that automatically runs at a speed below a driver's set speed, but maintains the distance between the target vehicles at a predetermined distance or more, and / or It provides a tracking function that maintains an interval to prevent collision with a target vehicle in front obtained by the position measurement sensor, or a cruise function that automatically drives at a speed set by the driver.
이러한 CACC 시스템은 운전자가 차량의 주행속도를 조절하기 위하여 엑셀을 계속하여 조작하지 않아도 된다는 편리함이 있고, 목표차량과 일정 거리 이상을 유지하고, 설정속도 이상으로 차량이 주행하는 것을 방지하여 안전운전을 지향할 수 있다.This CACC system has the convenience that the driver does not need to continuously operate the Excel in order to adjust the driving speed of the vehicle, maintains a certain distance from the target vehicle, and prevents the vehicle from driving at a speed higher than the set speed for safe driving. Can be oriented.
한편, CACC 시스템은 상술한 ACC 시스템에 V2X 통신을 추가하여 ACC 성능을 개선한 시스템으로서, V2I(Vehicle to Infrastructure)를 통해 도로의 제한속도를 수신하고, V2V(Vehicle to Vehicle)를 통해 동일차선을 주행하는 목표차량에 대한 정보를 수신한 후, 이를 기반으로 ACC 성능을 향상시킬 수 있다.Meanwhile, the CACC system is a system that improves ACC performance by adding V2X communication to the above-described ACC system, receives a speed limit of a road through a vehicle to infrastructure (V2I), and uses the same lane through a vehicle to vehicle (V2V). After receiving information on the target vehicle to be driven, the ACC performance may be improved based on this.
하지만, 종래의 CACC 시스템은 자차량의 바로 앞의 선행차량을 목표차량으로 설정한 후 상기 목표차량의 속도를 기반으로 자차량의 속도를 조절하기 때문에 급가속이나 급출발이 빈번하게 발생하는 문제점이 있다. However, the conventional CACC system has a problem that frequent acceleration or sudden departure occurs because the speed of the host vehicle is adjusted based on the speed of the target vehicle after setting the preceding vehicle immediately before the host vehicle as the target vehicle. .
본 발명은 선행차량 및 선선행 차량의 주행정보에 기초하여 주행속도를 결정하는 CACC 시스템 및 그 제어방법을 제공한다.The present invention provides a CACC system and a control method for determining a driving speed based on driving information of a preceding vehicle and a preceding vehicle.
상기 목적을 달성하기 위한 본 발명에 의한 자차량에 구비되고 자차량의 주행 속도를 제어하는 협조 적응 순항 제어(Cooperative Adaptive Cruise Control; 이하 CACC) 시스템은 주변차량들로부터 위치 및 주행정보를 포함하는 차량정보를 수신하는 통신부, 자차량에 구비된 센서들을 이용하여 주변 차량의 차량 정보 및 상기 자차량의 차량정보를 수집하는 정보수집부, 상기 자차량에 구비된 센서들을 이용하여 선행차량 및 선선행차량을 결정하고, 상기 선행차량 및 선선행차량의 차량정보와 통신부에서 획득한 주변차량들의 차량정보를 바탕으로 상기 자차량이 추종하기 위한 목표차량(이하 제1 목표차량) 및 상기 목표차량이 추종하는 목표차량(이하 제2 목표차량)을 선정하고, 선정된 상기 제1 목표차량 및 제2 목표차량의 속도정보를 바탕으로 상기 자차량의 주행 속도를 제어하는 제어부를 포함할 수 있다. 이에 더하여 CACC 시스템은 스로틀(throttle) 및 브레이크를 제어하는 구동부 및/또는 상기 협조 적응 순항 제어 시스템의 상태 정보를 운전자에게 알려줄 수 있는 DVI부를 더 포함할 수 있고, 상기 제어부는 상기 자차량의 주행 속도를 제어하기 위하여 상기 구동부를 제어할 수 있다.A cooperative adaptive cruise control (CACC) system provided in the host vehicle according to the present invention and controlling the driving speed of the host vehicle according to the present invention for achieving the above object is a vehicle including location and driving information from surrounding vehicles A communication unit that receives information, an information collecting unit that collects vehicle information of surrounding vehicles and vehicle information of the own vehicle using sensors provided in the own vehicle, and a preceding vehicle and a preceding vehicle using sensors provided in the own vehicle. The target vehicle (hereinafter referred to as the first target vehicle) and the target vehicle for tracking the host vehicle based on the vehicle information of the preceding vehicle and the preceding vehicle and the vehicle information of the surrounding vehicles acquired by the communication unit The target vehicle (hereinafter referred to as the second target vehicle) is selected, and the owner of the host vehicle is based on the selected speed information of the first target vehicle and the second target vehicle. It may comprise a control unit for controlling the speed. In addition, the CACC system may further include a driving unit for controlling throttle and brake, and / or a DVI unit for informing the driver of status information of the cooperative adaptive cruise control system, wherein the control unit is driven at the speed of the host vehicle. The control unit may be controlled to control.
좀 더 상세하게 살펴보면, 상기 제어부는 협조 적응 순항 제어 시스템의 상태를 관리하는 상태관리부, 상기 자차량에 구비된 센서들을 이용하여 선행차량 및 선선행차량을 결정하고, 상기 선행차량 및 선선행차량의 차량정보와 통신부에서 획득한 주변차량들의 차량정보를 바탕으로 상기 자차량이 추종하기 위한 목표차량(이하 제1 목표차량) 및 상기 목표차량이 추종하는 목표차량(이하 제2 목표차량)을 선정하는 목표차량 선정부, 및 선정된 상기 제1 목표차량 및 제2 목표차량의 속도정보를 바탕으로 상기 자차량의 주행 속도를 제어하는 주행관리부를 포함할 수 있고, 상기 상태관리부는 협조 적응 순항 제어 시스템이 동작하지 않는 오프(OFF)상태, 동작은 하지만 상기 자차량의 주행 속도를 제어하지 않는 대기상태, V2V 통신으로 연결되어 있는 관심영역 내 차량이 없이 상기 자차량에서 획득한 정보만을 이용하여 상기 자차량의 주행 속도를 제어하는 ACC 활성상태, 및 V2V 통신으로 연결되어 있는 관심영역 내의 주변차량이 있어, 상기 V2V 통신을 통해 획득한 주변차량으로부터의 정보 및 상기 자차량에서 획득한 정보를 이용하여 상기 자차량의 주행 속도를 제어하는 협조 활성상태 중의 하나로 상기 협조 적응 순항 제어 시스템의 상태를 표시하며, 상기 정보수집부는 전방 물체를 감지하는 거리센서를 포함하고, 상기 목표차량 선정부는 상기 거리센서의 감지 결과를 기초로 상기 자차량의 주행 차로와 동일한 차로를 주행하는 선행 차량 및 선선행 차량의 존재를 결정할 수 있다.Looking in more detail, the control unit determines the preceding vehicle and the preceding vehicle using the state management unit that manages the state of the cooperative adaptive cruise control system, and the sensors provided in the host vehicle, and determines the preceding vehicle and the preceding vehicle. Selecting a target vehicle (hereinafter referred to as a first target vehicle) and a target vehicle following the target vehicle (hereinafter referred to as a second target vehicle) based on vehicle information and vehicle information of surrounding vehicles acquired by the communication unit. A target vehicle selection unit, and a driving management unit that controls the driving speed of the host vehicle based on the selected speed information of the first target vehicle and the second target vehicle, and the state management unit includes a coordinated adaptive cruise control system This does not operate in an OFF state, but a standby state in which the vehicle operates but does not control the driving speed of the host vehicle, and interest interest connected by V2V communication. There is an ACC active state that controls the driving speed of the own vehicle using only the information obtained from the own vehicle without a vehicle in the station, and a surrounding vehicle in a region of interest connected by V2V communication, acquired through the V2V communication One of the cooperative active states for controlling the traveling speed of the host vehicle using information from the surrounding vehicle and information obtained from the host vehicle displays the status of the coordinated adaptive cruise control system, and the information collector detects an object in front The target vehicle selection unit may determine the presence of a preceding vehicle and a preceding vehicle driving the same lane as the driving lane of the host vehicle based on the detection result of the distance sensor.
그리고 상기 목표차량 선정부는 상기 거리센서의 감지 결과에 따라, 미리 정해진 제1 기준 폭 이상의 폭을 가지는 상기 자차량의 주행 차로 상의 물체를 상기 선행 차량으로 결정하고, 또는 상기 자차량의 주행 차로의 곡률이 미리 정해진 기준 곡률보다 작으면, 미리 정해진 기준 시간 동안 상기 제2 기준 폭 이상의 폭을 가지는 물체를 상기 선선행 차량으로 결정하고, 또는 상기 제2 기준 폭 이상의 폭을 가지는 물체 중 상기 기준 시간 동안 상기 폭이 증가하는 물체를 상기 선선행 차량으로 결정할 수 있다. 이에 더하여 상기 목표차량 선정부는 상기 전방 물체와의 거리 및 상기 선행 차량의 위치를 기초로 상기 제2 기준 폭을 획득할 수 있고, 상기 주행 차로의 곡률이 미리 정해진 기준 곡률 이상이면, 상기 거리센서에 의해 복수의 면이 감지되고 상기 제2 기준 폭 이상의 폭을 가지는 물체를 상기 선선행 차량으로 결정할 수 있으며, 또는 상기 거리센서에 의해 상기 제2 기준 폭 이상의 폭을 가지는 물체가 복수 개 감지되면, 상기 선행 차량에 가장 인접한 물체를 상기 선선행 차량으로 결정할 수 있다.In addition, the target vehicle selection unit determines, as the preceding vehicle, an object on the driving lane of the host vehicle having a width equal to or greater than a predetermined first reference width according to the detection result of the distance sensor, or the curvature of the driving lane of the host vehicle. If it is smaller than the predetermined reference curvature, the object having a width greater than or equal to the second reference width for a predetermined reference time is determined as the preceding vehicle, or among the objects having a width greater than or equal to the second reference width, during the reference time An object having an increased width may be determined as the preceding vehicle. In addition, the target vehicle selection unit may obtain the second reference width based on the distance from the front object and the position of the preceding vehicle, and if the curvature of the driving lane is greater than or equal to a predetermined reference curvature, the distance sensor When a plurality of surfaces are detected and an object having a width greater than or equal to the second reference width can be determined as the preceding vehicle, or when a plurality of objects having a width greater than or equal to the second reference width is detected by the distance sensor, the The object closest to the preceding vehicle may be determined as the preceding vehicle.
그리고 상기 주행관리부는 상기 제1 목표차량의 주행 정보에 대응되는 제1 주행 속도 및 상기 제2 목표차량의 주행 정보에 대응되는 제2 주행 속도 중 어느 하나에 따라 주행하도록 상기 자차량을 제어할 수 있고, 또는 상기 제1 주행 속도 및 상기 제2 주행 속도 중 작은 값에 따라 주행하도록 상기 자차량을 제어할 수 있고, 또는 상기 자차량의 주행 차로의 곡률이 미리 정해진 제1 기준 곡률보다 작으면, 상기 제1 목표차량의 상기 자차량의 주행 차로 이탈 시, 상기 제1 목표차량 및 상기 제2 목표차량의 주행 정보에 따라 결정되는 주행 속도로 주행하도록 상기 자차량을 제어할 수 있다. 그리고 상기 거리센서의 감지 결과로부터 획득된 상기 제1 목표차량의 속도 및 위치를 이용하여 상기 제1 목표차량의 상기 자차량의 주행 차로 이탈 여부를 결정할 수 있다.In addition, the driving management unit may control the host vehicle to travel according to any one of a first driving speed corresponding to the driving information of the first target vehicle and a second driving speed corresponding to the driving information of the second target vehicle. Or the vehicle can be controlled to travel according to a smaller value among the first driving speed and the second driving speed, or if the curvature of the driving lane of the own vehicle is smaller than a predetermined first reference curvature, When the driving lane of the host vehicle of the first target vehicle deviates, the host vehicle may be controlled to travel at a driving speed determined according to driving information of the first target vehicle and the second target vehicle. In addition, it is possible to determine whether to deviate from the driving lane of the host vehicle of the first target vehicle by using the speed and position of the first target vehicle obtained from the sensing result of the distance sensor.
여기서 상기 거리센서는 라이다(Lidar)를 포함할 수 있다.Here, the distance sensor may include a lidar.
이에 더하여 상기 정보수집부는 전방 영상을 획득하는 카메라를 더 포함하고, 상기 목표차량 선정부는 상기 카메라에 의해 획득된 전방 영상으로부터 상기 자차량이 주행 중인 차로의 정보를 획득할 수 있다. In addition, the information collecting unit further includes a camera that acquires a front image, and the target vehicle selection unit may obtain information of a lane in which the host vehicle is driving from the front image acquired by the camera.
상기 목적을 달성하기 위한 본 발명에 의한 자차량에 구비되고 자차량의 주행 속도를 제어하는 협조 적응 순항 제어(Cooperative Adaptive Cruise Control; 이하 CACC) 시스템의 속도 제어방법은 V2V 통신을 이용하여 주변차량의 차량 정보를 획득하는 단계, 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 단계, 상기 주변차량의 차량 정보와 상기 선행차량 및 선선행차량의 차량 정보를 비교하여 제1 목표차량 및 제2 목표차량을 결정하는 단계, 상기 제1 목표차량 및 상기 제2 목표차량의 주행 정보를 이용하여 상기 자차량의 주행 속도를 결정하는 단계, 및 결정된 상기 주행 속도에 따라 상기 자차량을 제어하는 단계를 포함할 수 있다.A speed control method of a cooperative adaptive cruise control (CACC) system provided in a host vehicle according to the present invention and controlling a driving speed of the host vehicle according to the present invention for achieving the above object is performed using a V2V communication. Obtaining vehicle information, determining a preceding vehicle and a preceding vehicle using a sensor of the host vehicle, comparing vehicle information of the surrounding vehicle with vehicle information of the preceding vehicle and the preceding vehicle, and selecting the first target vehicle and Determining a second target vehicle, determining driving speed of the own vehicle using the first target vehicle and the driving information of the second target vehicle, and controlling the own vehicle according to the determined driving speed It may include steps.
좀 더 상세하게 살펴보면, 상기 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 단계는 전방 물체를 감지하는 단계, 상기 감지 결과를 기초로 상기 자차량의 주행 차로와 동일한 차로로 주행하는 선행차량을 결정하는 단계, 및 결정된 상기 선행차량의 위치를 이용하여 선선행 차량을 결정하는 단계를 포함할 수 있고, 더 나아가 상기 선행차량을 결정하는 단계는 상기 감지결과에 따라, 미리 정해진 제1 기준 폭 이상의 폭을 가지는 상기 자차량의 주행 차로 상의 물체를 상기 선행 차량으로 결정하거나 또는 상기 선행 차량의 위치에 의해 획득되는 제2 기준 폭 이상의 폭을 가지는 상기 자차량의 주행 차로 상의 물체를 상기 선선행 차량으로 결정하거나 또는 상기 주행 차로의 곡률이 미리 정해진 기준 곡률보다 작으면, 미리 정해진 기준 시간 동안 상기 제2 기준 폭 이상의 폭을 가지는 물체를 상기 선선행 차량으로 결정하거나, 또는 상기 제2 기준 폭 이상의 폭을 가지는 물체 중 상기 기준 시간 동안 상기 폭이 증가하는 물체를 상기 선선행 차량으로 결정하거나, 또는 상기 전방 물체와의 거리 및 상기 선행 차량의 위치를 기초로 상기 제2 기준 폭을 획득하는 단계 및 상기 획득한 제2 기준 폭 이상의 폭을 가지는 상기 자차량의 주행 차로 상의 물체를 상기 선선행 차량으로 결정하는 단계를 포함하거나 또는 상기 주행 차로의 곡률이 미리 정해진 기준 곡률 이상이면, 복수의 면이 감지되고 상기 제2 기준 폭 이상의 폭을 가지는 물체를 상기 선선행 차량으로 결정하거나, 또는 상기 제2 기준 폭 이상의 폭을 가지는 물체가 복수 개 감지되면, 상기 선행 차량에 가장 인접한 물체를 상기 선선행 차량으로 결정할 수 있다.Looking in more detail, the step of determining the preceding vehicle and the preceding vehicle using the sensor of the host vehicle includes detecting a front object and driving in the same lane as the driving lane of the host vehicle based on the detection result. Determining a preceding vehicle, and determining the preceding vehicle by using the determined position of the preceding vehicle, furthermore, determining the preceding vehicle, the predetermined first, according to the detection result The object on the driving lane of the own vehicle having a width equal to or greater than a reference width is determined as the preceding vehicle, or the object on the driving lane of the own vehicle having a width greater than or equal to the second reference width obtained by the position of the preceding vehicle is selected as the preceding vehicle. If it is determined as a preceding vehicle or the curvature of the driving lane is smaller than a predetermined reference curvature, the predetermined criterion An object having a width greater than or equal to the second reference width for a time is determined as the preceding vehicle, or an object having a width greater than or equal to the second reference width is increased as the preceding vehicle. Or, the step of acquiring the second reference width based on the distance from the front object and the position of the preceding vehicle and the object on the driving lane of the own vehicle having a width equal to or greater than the obtained second reference width Determining the preceding vehicle or if the curvature of the driving lane is greater than or equal to a predetermined reference curvature, an object having a plurality of surfaces and having a width greater than or equal to the second reference width is determined as the preceding vehicle, or When a plurality of objects having a width equal to or greater than the second reference width are detected, the line closest to the object closest to the preceding vehicle It can be determined by the vehicle.
그리고 상기 제1 목표차량 및 상기 제2 목표차량의 주행 정보를 이용하여 상기 자차량의 주행 속도를 결정하는 단계는 상기 제1 목표차량의 주행 정보에 대응되는 제1 주행 속도를 획득하는 단계, 상기 제2 목표차량의 주행 정보에 대응되는 제2 주행 속도를 획득하는 단계, 및 상기 제1 주행 속도 및 상기 제2 주행 속도 중 어느 하나에 따라 상기 자차량의 주행 속도를 결정하는 단계를 포함할 수 있고, 이어 더하여 상기 제1 주행 속도 및 상기 제2 주행 속도 중 어느 하나에 따라 상기 자차량의 주행 속도를 결정하는 단계는 상기 제1 주행 속도 및 상기 제2 주행 속도 중 작은 값을 상기 자차량의 주행 속도로 결정하는 단계일 수 있다.And determining the driving speed of the host vehicle by using the driving information of the first target vehicle and the second target vehicle is obtaining a first driving speed corresponding to the driving information of the first target vehicle, the And obtaining a second driving speed corresponding to the driving information of the second target vehicle, and determining the driving speed of the host vehicle according to any one of the first driving speed and the second driving speed. In addition, the step of determining the traveling speed of the own vehicle according to any one of the first traveling speed and the second traveling speed may include a smaller value of the first traveling speed and the second traveling speed of the own vehicle. It may be a step determined by the driving speed.
또한, 상기 제1 목표차량 및 상기 제2 목표차량의 주행 정보를 이용하여 상기 자차량의 주행 속도를 결정하는 단계는 상기 자차량이 주행하는 차로의 곡률이 미리 정해진 제1 기준 곡률보다 작으면, 상기 제1 목표차량이 상기 자차량이 주행하는 차로를 이탈하는 지를 판단하는 단계 및 상기 제1 목표차량이 상기 자차량이 주행하는 차로를 이탈한 것으로 결정되면, 상기 제1 목표차량 및 상기 제2 목표차량의 주행 정보를 이용하여 상기 자차량의 주행 속도를 결정하는 단계를 포함할 수 있고, 이에 더하여 상기 제1 목표차량이 상기 자차량이 주행하는 차로를 이탈하는 지를 판단하는 단계는 상기 제1 목표차량의 속도 및 위치를 이용하여 상기 제1 목표차량의 상기 자차량이 주행하는 차로 이탈 여부를 결정하는 단계를 포함할 수 있다. In addition, the step of determining the traveling speed of the host vehicle using the driving information of the first target vehicle and the second target vehicle, if the curvature of the lane on which the host vehicle travels is smaller than a predetermined first reference curvature, Determining whether the first target vehicle deviates from a lane on which the host vehicle travels, and when it is determined that the first target vehicle deviates from a lane on which the host vehicle runs, the first target vehicle and the second And determining the driving speed of the host vehicle using the driving information of the target vehicle. In addition, determining whether the first target vehicle deviates from the lane on which the host vehicle travels is the first. And determining whether to leave the lane in which the host vehicle of the first target vehicle runs using the speed and position of the target vehicle.
그리고 상기 전방 물체와의 거리를 감지하는 단계는 라이다(Lidar)를 이용하여 상기 전방 물체와의 거리를 감지하는 단계를 포함하고, 상기 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 단계는 전방 영상을 획득하는 단계, 상기 전방 영상으로부터 상기 자차량의 주행 차로를 결정하는 단계를 더 포함할 수 있다.And the step of sensing the distance to the front object includes the step of sensing the distance to the front object using a lidar, and determines the preceding vehicle and the preceding vehicle using the sensor of the host vehicle. The step of acquiring may further include the step of acquiring a front image and determining a driving lane of the host vehicle from the front image.
본 발명은 CACC 시스템을 수행함에 있어서, 제1 목표차량 및 제2 목표차량의 주행정보를 이용하여 자차량의 주행 속도를 결정함으로써, 주행의 안전성을 더욱 높일 수 있고, 특히 제1 목표차량보다 제2 목표차량이 저속으로 주행할 때, 제1 목표차량의 갑작스런 차로 변경 시에도 제2 목표차량의 주행 정보에 따라 주행속도를 결정함으로써 운전자에게 안전한 주행 환경을 제공할 수 있다.In the present invention, by performing the CACC system, by determining the driving speed of the host vehicle using the driving information of the first target vehicle and the second target vehicle, it is possible to further improve the safety of driving, and in particular, the first target vehicle. 2 When a target vehicle is traveling at a low speed, even when a sudden lane of the first target vehicle is changed, it is possible to provide a safe driving environment to the driver by determining the driving speed according to the driving information of the second target vehicle.
도 1 은 본 발명이 적용되는 CACC 시스템(300)의 일 예시도이다.
도 2는 직선 도로상에서 CACC 시스템(300)의 관심영역(Region of Interest; ROI)을 도시한 도면이다.
도 3은 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 블록도이다.
도 4는 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 상태천이도를 나타낸 도면이다.
도 5는 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 주행 속도 제어 과정을 설명하기 위한 도면이다.
도 6a 및 도 6b는 선행차량(Cp1)의 위치에 따른 선행차량(Cp1) 및 선선행차량(Cp2)의 감지 결과를 설명하기 위한 도면이다.
도 7은 선행차량(Cp1)이 우측으로 차로 변경 중인 경우를 예시한 도면이다.
도 8은 곡선 주행 차로에 대하여 선행차량의 위치에 따른 선행차량 및 선선행차량의 감지 결과를 설명하기 위한 도면이다.
도 9는 본 발명의 일 실시예에 따른 CACC 시스템(300)에서 자차량의 주행 속도를 제어하는 흐름도이다.
도 10은 본 발명의 일 실시예에 따른 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다.
도 11는 본 발명의 일 실시 예에 따른 직선 주행 차로에 대하여 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다.
도 12는 본 발명의 일 실시 예에 따른 곡선 주행 차로에 대하여 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다.1 is an exemplary view of a
2 is a diagram showing a region of interest (ROI) of the
3 is a block diagram of a
4 is a view showing a state transition diagram of the
5 is a view for explaining a driving speed control process of the
6A and 6B are diagrams for explaining the detection results of the preceding vehicle Cp1 and the preceding vehicle Cp2 according to the position of the preceding vehicle Cp1.
7 is a diagram illustrating a case in which the preceding vehicle Cp1 is being changed to the right by a lane.
8 is a view for explaining the detection results of the preceding vehicle and the preceding vehicle according to the position of the preceding vehicle with respect to the curved driving lane.
9 is a flowchart for controlling the driving speed of the host vehicle in the
10 is a flowchart of determining a preceding vehicle and a preceding vehicle using a sensor of a host vehicle in the
11 is a flowchart of determining a preceding vehicle and a preceding vehicle using a sensor of a host vehicle in the
12 is a flowchart for determining a preceding vehicle and a preceding vehicle using a sensor of a host vehicle in the
본 발명을 명확하게 설명하기 위해서 설명과 관계없는 부분은 생략하였으며, 명세서 전체를 통하여 동일 또는 유사한 구성요소에 대해서는 동일한 참조 부호를 붙이도록 한다.In order to clearly describe the present invention, parts irrelevant to the description are omitted, and the same reference numerals are assigned to the same or similar elements throughout the specification.
명세서 전체에서, 어떤 부분이 다른 부분과 "연결"되어 있다고 할 때, 이는 "직접적으로 연결"되어 있는 경우뿐 아니라, 그 중간에 다른 소자를 사이에 두고 "전기적으로 연결"되어 있는 경우도 포함한다. 또한, 어떤 부분이 어떤 구성요소를 "포함"한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있는 것을 의미한다.Throughout the specification, when a part is "connected" to another part, this includes not only "directly connected" but also "electrically connected" with another element in between. . In addition, when a part is said to "include" a certain component, this means that other components may be further included instead of excluding other components, unless specifically stated otherwise.
어느 부분이 다른 부분의 "위에" 있다고 언급하는 경우, 이는 바로 다른 부분의 위에 있을 수 있거나 그 사이에 다른 부분이 수반될 수 있다. 대조적으로 어느 부분이 다른 부분의 "바로 위에" 있다고 언급하는 경우, 그 사이에 다른 부분이 수반되지 않는다.When one part is said to be "above" another part, it may be directly on top of the other part or another part may be involved in between. In contrast, if one part is said to be "just above" another part, no other part is involved in between.
제1, 제2 및 제3 등의 용어들은 다양한 부분, 성분, 영역, 층 및/또는 섹션들을 설명하기 위해 사용되나 이들에 한정되지 않는다. 이들 용어들은 어느 부분, 성분, 영역, 층 또는 섹션을 다른 부분, 성분, 영역, 층 또는 섹션과 구별하기 위해서만 사용된다. 따라서, 이하에서 서술하는 제1부분, 성분, 영역, 층 또는 섹션은 본 발명의 범위를 벗어나지 않는 범위 내에서 제2부분, 성분, 영역, 층 또는 섹션으로 언급될 수 있다.Terms such as first, second and third are used to describe various parts, components, regions, layers and / or sections, but are not limited thereto. These terms are only used to distinguish one part, component, region, layer or section from another part, component, region, layer or section. Accordingly, a first portion, component, region, layer or section described below may be referred to as a second portion, component, region, layer or section without departing from the scope of the present invention.
여기서 사용되는 전문 용어는 단지 특정 실시 예를 언급하기 위한 것이며, 본 발명을 한정하는 것을 의도하지 않는다. 여기서 사용되는 단수 형태들은 문구들이 이와 명백히 반대의 의미를 나타내지 않는 한 복수 형태들도 포함한다. 명세서에서 사용되는 "포함하는"의 의미는 특정 특성, 영역, 정수, 단계, 동작, 요소 및/또는 성분을 구체화하며, 다른 특성, 영역, 정수, 단계, 동작, 요소 및/또는 성분의 존재나 부가를 제외시키는 것은 아니다.The terminology used herein is only for referring to a specific embodiment, and is not intended to limit the present invention. The singular forms used herein include plural forms unless the phrases clearly indicate the opposite. As used herein, the meaning of “comprising” embodies a particular property, region, integer, step, action, element, and / or component, and the presence or presence of other properties, regions, integers, steps, action, element, and / or component. It does not exclude addition.
"아래", "위" 등의 상대적인 공간을 나타내는 용어는 도면에서 도시된 한 부분의 다른 부분에 대한 관계를 보다 쉽게 설명하기 위해 사용될 수 있다. 이러한 용어들은 도면에서 의도한 의미와 함께 사용 중인 장치의 다른 의미나 동작을 포함하도록 의도된다. 예를 들면, 도면 중의 장치를 뒤집으면, 다른 부분들의"아래"에 있는 것으로 설명된 어느 부분들은 다른 부분들의 "위"에 있는 것으로 설명된다. 따라서 "아래"라는 예시적인 용어는 위와 아래 방향을 전부 포함한다. 장치는 90˚ 회전 또는 다른 각도로 회전할 수 있고, 상대적인 공간을 나타내는 용어도 이에 따라서 해석된다.Terms referring to relative spaces such as "below", "above", etc. may be used to more easily describe the relationship of one part to another part shown in the drawings. These terms are intended to include other meanings or actions of the device in use with the meanings intended in the drawings. For example, if the device in the figure is turned over, some parts described as being "below" other parts are described as being "above" other parts. Thus, the exemplary term “below” includes both the up and down directions. The device can be rotated 90 degrees or rotated at different angles, and terms indicating relative space are also interpreted accordingly.
다르게 정의하지는 않았지만, 여기에 사용되는 기술용어 및 과학용어를 포함하는 모든 용어들은 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자가 일반적으로 이해하는 의미와 동일한 의미를 가진다. 보통 사용되는 사전에 정의된 용어들은 관련 기술문헌과 현재 개시된 내용에 부합하는 의미를 가지는 것으로 추가 해석되고, 정의되지 않는 한 이상적이거나 매우 공식적인 의미로 해석되지 않는다.Although not defined differently, all terms including technical terms and scientific terms used herein have the same meaning as those generally understood by those skilled in the art to which the present invention pertains. Commonly used dictionary-defined terms are further interpreted as having meanings consistent with related technical documents and currently disclosed contents, and are not interpreted as ideal or very official meanings unless defined.
이하, 첨부한 도면을 참조하여 본 발명의 실시예에 대하여 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자가 용이하게 실시할 수 있도록 상세히 설명한다. 그러나 본 발명은 여러 가지 상이한 형태로 구현될 수 있으며 여기에서 설명하는 실시 예에 한정되지 않는다. Hereinafter, exemplary embodiments of the present invention will be described in detail with reference to the accompanying drawings so that those skilled in the art to which the present invention pertains can easily practice. However, the present invention can be implemented in many different forms and is not limited to the embodiments described herein.
먼저 본 명세서에서 사용될 수 있는 용어를 정의한다.First, terms that can be used in the present specification are defined.
선행차량(forward vehicle): 자차량과 동일한 도로를 따라 같은 방향으로 이동하면서 자차량의 앞에 있는 차량.Forward vehicle: A vehicle in front of the own vehicle, moving in the same direction along the same road as the own vehicle.
선선행차량(far-forward vehicle): 자차량 및 선행차량과 동일한 도로를 따라 같은 방향으로 이동하면서 선행차량의 앞에 있는 차량.Far-forward vehicle: A vehicle in front of a preceding vehicle, moving in the same direction along the same road as the host vehicle and preceding vehicle.
간격(clearance): 선행 차량의 끝부분과 자차량의 앞부분 사이의 거리. Clearance: the distance between the end of the preceding vehicle and the front of the host vehicle.
관심영역(Region of Interest): 후술할 잠재적 관심차량 및 목표차량이 존재하는 영역으로서 자차량에 구비된 CACC 시스템의 제어에 영향을 미칠 수 있는 영역.Region of Interest: An area in which potential vehicles of interest and target vehicles, which will be described later, exist, which can influence the control of the CACC system provided in the host vehicle.
잠재적 관심차량(Potential Vehicle of Interest): 관심영역에 존재하고 자차량과 V2V 통신을 수행하는 차량.Potential Vehicle of Interest: A vehicle that exists in the region of interest and performs V2V communication with the host vehicle.
목표차량(Target Vehicle): 자차량이 추종하는 차량으로서 V2V통신으로 자차량과 연결되어 있을 수도 있고, 연결되어 있지 않을 수도 있음.Target Vehicle: A vehicle that is followed by the host vehicle, which may or may not be connected to the host vehicle via V2V communication.
타임갭(time gap): 자차량의 속도와 선행차량과의 간격에 의하여 계산되는 값. 타임갭=간격/속도 Time gap: A value calculated by the speed of the host vehicle and the distance between the preceding vehicle. Time gap = interval / speed
이하, 첨부된 도면을 참조하여 본 발명에 따른 바람직한 실시예를 상세히 설명하기로 한다.Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings.
도1 은 본 발명이 적용되는CACC 시스템의 일 예시도이다.1 is an exemplary view of a CACC system to which the present invention is applied.
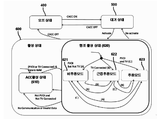
도 1에 도시된 바와 같이, 본 발명에 적용되 는CACC 시스템(300)은 종래의 ACC 시스템의 감지(sensing) 능력을 강화시키기 위하여 전방 차량들 및/또는 인프라스트럭쳐(Infrastructure)와의 무선통신 기능이 추가된 시스템이다. CACC 시스템(300)은 V2I 통신을 사용하여 RSE(Road-Side Equipment)(10)로부터 도로의 제한 속도, 타임갭(Time Gap; 전방 차량과의 시간 차이), 및 또는 다른 표준 메시지들을 수신할 수 있다. 즉, 차량의 CACC 시스템(300)은 V2I 통신을 통하여 지역 교통관제 시스템으로부터 추천되는 설정 속도 또는 타임갭과 같은 정보를 입력받을 수 있다. 또한, CACC 시스템(300)은 적어도 하나 이상의 주변차량(20)과의 V2V 통신을 통하여 주변차량(20)의 주행정보(속도 및 가속도)를 포함하는 주변차량정보를 수신하거나 자신의 차량정보를 주변차량(20)에 전달할 수 있다. 이에 더하여 종래의 센서들을 이용하여 전방에 존재할 수 있는 차량 정보를 획득할 수 있다. As shown in FIG. 1, the
이때 주행차량정보는 타차량과 구별할 수 있는 차량 식별자(Identification; ID), 차량 형태, 크기, 브레이크 성능, 총 차량 무게를 포함하는 차량의 재원, 위도, 경도, 고도의 3차원으로 표시된 차량의 위치, 정북방향을 기준으로 측정된 차량의 진행각, 차량 속도, 가속도, 요레이트(yaw rate), 브레이크 상태, 스로틀(throttle) 위치, 스티어링각 등을 포함할 수 있다.At this time, the driving vehicle information is a vehicle identifier (ID) that can be distinguished from other vehicles, vehicle type, size, brake performance, total vehicle weight, including the vehicle's resources, latitude, longitude, and height of the vehicle displayed in three dimensions. It may include the position, the progress angle of the vehicle, the vehicle speed, acceleration, yaw rate, brake state, throttle position, steering angle, etc. measured based on the north-north direction.
또한, CACC 시스템(300)은 DVI(Driver Vehicle Interface; 60)를 통하여 운전자로부터 설정 속도나 타임갭을 입력 받을 수 있고, CACC 시스템(300)의 상태 정보 등을 운전자에게 알려줄 수 있다. 또한, CACC 시스템(300)은 차량 내부의 각종 센서나 제어장치로부터 차량 정보(50)를 획득할 수 있다. 그리하여, CACC 시스템(300)은 전술한 방식으로 수집한 각종 데이터를 기반으로 스로틀이나 브레이크를 제어하여 차량의 속도를 제어할 수 있다. In addition, the
이처럼 V2V 통신 및/또는 V2I 통신에 의한 정보 획득에 의하여, CACC 시스템(300)은 부드러운 승차감을 유지하면서도 전방 차량과의 타임갭을 좀 더 정확하게 제어할 수 있고, 복수 개의 전방 차량에 의한 속도 변화에 훨씬 빠르게 응답할 수 있고, 안전이나 운전자의 안정감을 약화시키지 않으면서 더 짧은 타임갭을 설정할 수 있다는 장점을 가지게 된다.As described above, by acquiring information by V2V communication and / or V2I communication, the
도 2는 직선 도로상에서 CACC 시스템(300)의 관심영역(Region of Interest; ROI)을 도시한 도면이다. 2 is a diagram showing a region of interest (ROI) of the
CACC 시스템(300)은 관심영역 안에 들어오는 주변차량에 대하여만 관심을 가질 수 있다. 관심영역 밖에 있는 차량으로부터 오는 정보는 차량의 제어에 있어서 거의 의미가 없는 정보일 수 있다. 따라서 관심영역 내에 있는 차량으로부터 오는 정보만을 이용하여 제어하도록 함으로써 CACC 시스템(300)에 걸리는 부하를 줄일 수 있다.The
도 2를 참조하면, 관심영역은 CACC 시스템(300)이 장착된 차량의 중앙을 기준으로 좌우로 각각 16m씩 32m의 길이이면서, 운전석을 중심으로 전방으로는 250m, 후방으로는 100m까지로 설정할 수 있다. 만약 굽은 도로인 경우에는 직선 도로에서 설정된 관심영역을 굽은 도로의 곡률에 맞추어서 굽혀주어 설정할 수 있다. Referring to FIG. 2, the region of interest is 32 m long by 16 m each from the left and right relative to the center of the vehicle on which the
그리고 CACC 시스템(300)은 목표 차량(Target Vehicle)과 잠재적 관심 차량(Potential Vehicle of Interest; PVOI)을 설정할 수 있다. 목표 차량은 CACC 시스템(300)이 장착된 자차량이 따라가고 있는 전방의 차량을 말한다. 즉, CACC 시스템(300)은 타임갭 계산 시 목표 차량과 유지되는 거리를 사용하고, 타임갭을 일정하게 유지하는 대상도 목표차량이 된다. 잠재적 관심 차량은 관심영역 안에 있으면서 V2V 통신을 통하여 CACC 시스템(300)과 연결된 차량을 말한다. 잠재적 관심 차량은 CACC 시스템(300)을 장착한 자차량의 속도 제어에 영향을 줄 수 있는 차량일 수 있다. 옆 차선에서 자차량의 차선으로 합류할 것으로 예상되는 차량, 자차량 및 목표 차량과의 동일한 차선에 있으면서 목표 차량보다 앞에 있는 차량 등이 잠재적 관심 차량이 될 수 있으며 잠재적 관심 차량은 목표차량이 될 수 있다.In addition, the
도 3은 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 블록도이다.3 is a block diagram of a
도 3을 참조하면, 본 발명에 따른 CACC 시스템(300)은 정보수집부(310), 통신부(320), DVI부(340) 및 제어부(330)를 포함할 수 있고, 제어부(330)는 상태관리부(331) 주행관리부(333) 및 목표차량 선정부(335)를 포함할 수 있다. Referring to FIG. 3, the
통신부(320)는 V2I 통신을 기반으로 RSE(10)로부터 도로의 제한 속도, 타임갭(Time Gap; 전방 차량과의 시간 차이), 및 또는 다른 표준 메시지들을 수신할 수 있다. 즉, 차량의 CACC 시스템(300)은V2I 통신을 통하여 지역 교통관제 시스템으로부터 추천되는 설정 속도 또는 타임갭 정보뿐만 아니라 도로, 교통, 기상 및 생활에 관한 정보를 제공받을 수 있다. 또한 통신부(320)는 적어도 하나 이상의 주변차량(20)과의 V2V 통신을 통하여 주변차량(20)의 주행정보(속도 및 가속도)를 포함하는 주변차량정보를 수신하거나 자신의 차량정보를 주변차량(20)에 전달할 수 있다. 특히 이 경우 주변차량(20)의 자신의 주행정보뿐만 아니라 자신의 선행차량에 대한 식별자 정보 또는 주행정보를 제공할 수 있다. 주변차량이 식별자 정보만을 제공하는 경우에는 이러한 식별자 정보를 가진 주변차량으로부터 오는 정보를 이용하여 식별자 정보를 보낸 주변차량의 선행차량에 대한 차량정보를 획득할 수 있다. 따라서 자차량은 목표차량 및 목표차량보다 선행하는 차량에 대하여도 차량정보를 획득할 수 있다. 한편, 식별자 정보만을 전송하는 경우에는 각 차량이 전송하는 데이터량을 줄일 수 있다는 장점을 가질 수 있다. The
그리고 정보수집부(310)는 CACC 시스템(300)의 제어에 필요한 자차량의 정보 및 센서를 이용하여 수집한 주변환경 정보를 수집할 수 있다. 자차량의 정보는 자차량의 주행 속도, 스로틀, 브레이크 제어정보, 등을 포함할 수 있고, 주변환경 정보는 센서를 통해 수집한 주변차량(20) 정보를 포함할 수 있다. 특히 자차량의 전방에 목표차량이 존재하는 경우 레이더, 라이더(lidar) 등을 기반으로 목표차량의 주행 속도 및 이격거리 등을 산출하여 주변환경 정보로 수집할 수 있다. In addition, the
DVI부(340)는 운전자와 차량 간의 인터페이스(Driver-Vehicle Interface)를 통해 운전자로부터 입력된 설정 정보를 받아들일 수 있고, CACC 시스템(300)의 상태 정보, CACC 시스템(300)에 의해 생성될 수 있는 경고 정보 등 운전자에게 알릴 필요가 있는 정보를 운전자에게 전달할 수 있다. 일 예로서 운전자는 DVI부(340)를 통해 목표속도 및/또는 목표 타임갭을 입력할 수 있고, CACC 시스템(300)은 입력된 목표속도 및/또는 목표 타임갭에 맞추어 자차량이 운행되도록 제어할 수 있다. 또 다른 일 실시 예로 후술하겠지만 CACC 시스템(300)이 오프상태에 있는지, 대기상태에 있는지, 활성상태에 있는 지와 같은 상태 정보를 DVI부(340)를 통해 운전자에게 알려줄 수 있다. The
그리고 구동부(미도시)를 더 포함할 수 있는데 구동부는 후술할 제어부(330)의 주행관리부(333)의 제어신호에 따라 스로틀(throttle) 및/또는 브레이크를 제어할 수 있다. In addition, a driving unit (not shown) may be further included. The driving unit may control throttle and / or brake according to a control signal of the
제어부(330)는 정보수집부(310) 및 통신부(320)에서 획득한 정보를 바탕으로 자차량의 주행 속도를 제어할 수 있다. 즉, 제어부(330)는 통신부(320)에서 획득한 주변차량들의 차량정보 및 정보수집부(310)에서 수집한 선행차량의 주행 정보를 바탕으로 자차량이 추종하기 위한 목표차량을 선정하고, 만약 자차량이 추종하기 위한 목표차량이 선정되지 않으면, 자차량에 주어진 목표속도를 바탕으로 자차량의 주행 속도를 제어할 수 있고, 만약 자차량이 추종하기 위한 목표차량이 선정되면, 목표차량의 속도정보, 자차량의 속도정보 및 목표 타임갭을 바탕으로 자차량의 주행 속도를 제어할 수 있다. 이때 목표속도와 목표 타임갭은 사용자에 의하여 설정될 수 있지만, 이와 다르게 CACC 시스템(300)이 정보수집부(310) 및 통신부(320)에서 획득한 정보를 바탕으로 자동으로 목표속도와 목표 타임갭을 상황에 맞게 설정할 수도 있다.The
상술한 기능을 수행하기 위한 제어부(330)는 좀 더 세분하여 상태관리부(331), 주행관리부(333), 및 목표차량 선정부(335)를 포함할 수 있다.The
목표차량 선정부(335)는 통신부(320)를 통해 들어오는 복수의 주변차량(20)의 차량정보를 바탕으로 잠재적 관심 차량 및 목표차량을 선정할 수 있다. 잠재적 관심 차량은 전술한 관심영역 안에 존재하는 주변차량을 의미하는 것으로 주변차량으로부터 수신한 위치 정보 및 자차량의 위치정보를 바탕으로 주변차량이 관심영역 안에 있으면 잠재적 관심 차량으로 선정하여 등록할 수 있다. 이에 더하여 잠재적 관심 차량 중에서 자차량의 바로 앞에 선행하고 있는 차량을 목표차량으로 선정할 수 있다. 특히 목표차량의 경우에는 아주 높은 신뢰도로 검증이 되어야 할 필요가 있는바 하기 정보수집부(310)를 통하여 수집한 선행 차량의 정보를 바탕으로 하기 3가지 조건을 검증하여 목표차량으로 선정할 수 있다.The target
1: 잠재적 관심 차량의 위치 정보를 이용하여 자차량의 차선과 동일한 차선을 운행하는 잠재적 관심 차량(이하 제1 잠재적 관심차량 그룹으로 칭한다.)을 선정한다.1: Select potential vehicles of interest (hereinafter referred to as the first group of potential vehicles) that operate in the same lane as the lane of the host vehicle using the location information of the potential vehicle of interest.
2: 제1 잠재적 관심차량 그룹의 각 잠재적 관심차량으로부터 수신한 존재 범위 정보가 센서에 의해 측정된 범위로부터 (센서에 의해 측정된 범위의 0.1배) 또는 (각 잠재적 관심차량의 길이의 0.7배) 중의 큰 값 이내에 존재하는 잠재적 관심차량(이하 제2 잠재적 관심차량 그룹으로 칭한다)을 선정한다. 이때 잠재적 관심차량의 길이를 알 수 없다면 (각 잠재적 관심차량의 길이의 0.7배)는 3.3 미터로 할 수 있다.2: Presence range information received from each potential interest vehicle of the first potential interest vehicle group is from a range measured by the sensor (0.1 times the range measured by the sensor) or (0.7 times the length of each potential interest vehicle) A potential vehicle of interest (hereinafter referred to as a second group of potential vehicles) existing within a larger value is selected. At this time, if the length of the potential vehicle of interest is unknown (0.7 times the length of each potential vehicle of interest), it can be 3.3 meters.
3: 제2 잠재적 관심차량 그룹의 각 잠재적 관심차량으로부터 수신한 속도정보와 센서로 측정한 속도 간의 차이가 1m/s 이내인 잠재적 관심차량(제3 잠재적 관심차량 그룹)을 선정한다. 3: Select a potential interest vehicle (third potential interest vehicle group) in which the difference between the speed information received from each potential interest vehicle of the second potential interest vehicle group and the speed measured by the sensor is within 1 m / s.
상기 3가지 조건의 검증을 통하여 선정된 제3 잠재적 관심차량 그룹에는 단 1개의 잠재적 관심차량만이 포함되는 것이 일반적이지만 2 이상의 잠재적 관심차량이 포함되는 경우에는 제3 잠재적 관심차량 그룹의 각 잠재적 관심차량의 위치 정보를 기반으로 가장 가까운 위치에 있는 잠재적 관심차량을 목표차량으로 선정할 수 있다.The third potential interest vehicle group selected through verification of the above three conditions generally includes only one potential interest vehicle, but when two or more potential interest vehicles are included, each potential interest of the third potential interest vehicle group Based on the location information of the vehicle, the target vehicle can be selected as the potential vehicle of interest in the nearest location.
전술한 조건 검증은 하나의 샘플 데이터를 비교하여 판단하기보다는 누적된 샘플 데이터를 비교하여 판단한다면 좀 더 정확한 검증이 가능할 수 있다. The above-described condition verification may be more accurate verification if the accumulated sample data is compared and judged rather than by comparing one sample data.
일 실시 예로 하기의 수학식 1 및 수학식 2를 기반으로 상관계수를 산출한 후, 이를 기반으로 목표차량 여부를 판단할 수 있다.As an example, after calculating a correlation coefficient based on Equation 1 and Equation 2 below, it may be determined whether the target vehicle is based on the correlation coefficient.

여기서, N은 속도 및 가속도의 변화량 측정을 위한 샘플 수, VTV(N)은 레이더 기반으로 산출한 목표차량의 N번째 샘플에서의 속도, Vi(N)은 주변차량(i)으로부터 수신한 주행정보 중 N번째 샘플에서의 속도, ai(N)은 주변차량(i)으로부터 수신한 주행정보 중 N번째 샘플에서의 가속도, Δt는 주변차량(i)으로부터 수신한 주행정보 기반의 샘플 값과 레이더 기반의 속도 샘플 값과의 시간차를 각각 의미한다.Here, N is the number of samples for measuring the change in speed and acceleration, V TV (N) is the speed in the Nth sample of the target vehicle calculated based on radar, V i (N) is received from the surrounding vehicle (i) The speed in the Nth sample among driving information, a i (N) is the acceleration in the Nth sample among driving information received from the surrounding vehicle (i), Δt is the sample value based on the driving information received from the surrounding vehicle (i) And the time difference between the radar-based velocity sample value.
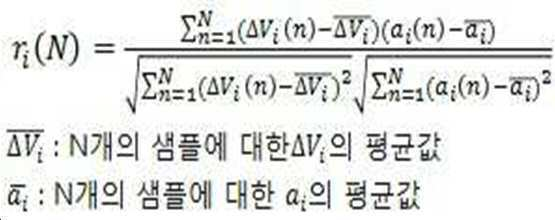
여기서, -1<r<1를 만족하고, r이 1에 가까울수록 상관관계가 높고 따라서 목표차량으로 검증할 수 있다.Here, -1 < r < 1 is satisfied, and the closer r is to 1, the higher the correlation, and thus can be verified by the target vehicle.
목표차량 선정부(335)에 의해 목표차량 또는 잠재적 관심 차량의 존재 여부가 결정되면 이러한 정보는 상태 관리부(331) 및/또는 주행 관리부(333)로 전달되어 각 기능의 용도에 맞게 사용될 수 있다.When the target
상태관리부(331)는 CACC 시스템(300)의 상태를 관리할 수 있다. CACC 시스템(300)은 자차량의 상태, 목표차량 및/또는 잠재적 관심차량의 존재여부에 따라 오프상태, 대기상태, 활성상태에 있을 수 있다.The
도 4는 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 상태천이도를 나타낸 도면이다.4 is a view showing a state transition diagram of the
도 4를 참조하면, CACC 시스템(300)은 CACC 시스템(300)이 동작하지 않는 오프(OFF)상태(400), 동작은 하지만 상기 자차량의 주행 속도를 제어하지 않는 대기상태(500), 및 상기 자차량의 주행 속도를 제어하는 활성상태(600)를 포함할 수 있다. 특히 활성상태(600)는 V2V 통신으로 연결되어 있는 관심영역 내 차량이 없이 상기 자차량에서 획득한 정보만을 이용하여 상기 자차량의 주행 속도를 제어하는 ACC 활성상태(610)와 V2V 통신으로 연결되어 있는 관심영역 내의 주변차량이 있어, 상기 V2V 통신을 통해 획득한 주변차량으로부터의 정보 및 상기 자차량에서 획득한 정보를 이용하여 상기 자차량의 주행 속도를 제어하는 협조 활성상태(620)를 포함할 수 있다. Referring to FIG. 4, the
오프상태(400)는 CACC 시스템(300)이 동작하지 않고 있는 상태이다. 즉 오프상태(400)에서 CACC 시스템(300)은 아무 기능도 수행하지 않는다. 자차량의 시동이 꺼지거나 운전자에 의하여 수동으로 오프상태(400)로 천이할 수 있다.The
대기상태(500)는 CACC 시스템(300)이 활성화되기 위하여 대기하고 있는 상태로, 대기상태(500)에서 CACC 시스템(300)은 속도 제어를 수행하지 않는다. CACC 시스템(300)은 자차량의 시동이 켜지면 자동으로 오프상태(400)에서 자가진단을 완료한 후 대기상태(500)로 천이할 수 있으며, 또는 운전자의 조작에 의하여 수동으로 오프상태(400)에서 대기상태로(200)로 천이할 수 있다. 또한 활성상태(600)에서 브레이크 또는 스로틀 제어와 같은 운전자의 수동 제어 입력이 들어오면 대기상태(500)로 천이할 수 있다.The
활성상태(600)는 CACC 시스템(300)이 활성화되어 속도 제어를 수행하는 상태이다. 활성상태(600)는 V2V 통신에 의하여 연결된 잠재적 관심차량 또는 목표차량이 없는 경우에는 ACC 활성상태(610)로 운용되고, V2V 통신에 의하여 연결된 잠재적 관심차량 또는 목표차량이 있는 경우에는 협조 활성상태(620)로 운용될 수 있다. CACC 시스템(300)은 대기상태(500)에서 자차량의 속도가 미리 정해진 속도(이하 제1속도)보다 높아졌을 때에 활성상태(600)로 천이할 수 있다. 그리고 활성상태(600)에서 자차량의 속도가 제1속도 이하로 떨어지면 CACC 시스템(300)은 가속이 금지되거나, 대기상태(500)로 천이할 수 있다.The
CACC 시스템(300)은 활성상태(600)로 천이 되었을 때 ACC 활성상태(610)로 먼저 동작할 수 있다. ACC 활성상태(610)에서는 종래의 ACC 시스템처럼 설정된 최고 속도에 맞추어 속도 제어(Cruise Control)를 수행하거나 전방에 차량이 존재하는 경우에는 추종 제어(Following Control)를 수행할 수 있다. ACC 활성상태(610)에서 V2V 통신에 의하여 연결된 잠재적 관심차량 또는 목표차량이 존재하고, 잠재적 관심차량 또는 목표차량으로부터 받은 데이터가 타당하면 협조 활성상태(620)로 천이할 수 있다. 여기서 데이터가 타당한지 검증하는 것은, 일 실시 예로서, 통신부(320)를 통해 V2V 통신을 이용하여 받은 잠재적 관심차량 또는 목표차량 관련 정보가 정보수집부(310)를 통해 받은 자차량의 센서에 의하여 획득된 차량 정보와 일치하면 데이터가 타당하다고 검증할 수 있다. 이러한 검증은 상기 목표차량 선정부(335)에서 수행될 수 있다.The
그리고 협조 활성상태(620)에서 잠재적 관심차량 및 목표차량이 존재하지 아니하면 ACC 활성상태(610)로 천이할 수 있고, 또한 V2V 통신이 수행되지 않거나 타당하지 아니한 데이터만이 수신되는 경우에도 ACC 활성상태(610)로 천이할 수 있다.In addition, if the potential vehicle of interest and the target vehicle do not exist in the cooperative active state 620, the ACC may transition to the
CACC 시스템(300)의 협조 활성상태(620)는 비추종모드(Non-Follow Mode; 621), 근접추종모드(Close-Follow Mode; 622), 추종모드(Follow Mode; 623)를 포함할 수 있다. 비추종모드(621)는 잠재적 관심차량은 V2V 통신으로 연결되어 있지만 목표차량이 존재하지 않은 경우에 동작하는 모드로서, CACC 시스템(300)에 의한 자차량의 속도 제어는 잠재적 관심차량으로부터 수신한 데이터에 의하여 영향을 받을 수 있다. The cooperative active state 620 of the
근접추종모드(622)는 V2V 통신으로 연결된 목표차량이 존재하는 경우에 동작하는 모드이며, 이때의 CACC 시스템(300)에 의한 자차량의 속도 제어는 연결된 목표차량 및 잠재적 관심차량으로부터 오는 정보에 의하여 영향을 받을 수 있다.
추종모드(330)는 목표차량이 존재하지만 V2V통신에 의하여 연결되지 않은 경우에 동작하는 모드로서, 이 경우의 목표차량은 자차량의 센서에 의해 감지될 수 있고 이러한 정보는 정보수집부(310)에서 획득할 수 있다. 이때의 CACC 시스템(300)에 의한 자차량의 속도 제어는 연결된 잠재적 관심차량으로부터 오는 정보 및 센서에 의해 감지된 목표차량에 의하여 영향을 받을 수 있다. The following
CACC 시스템(300)은 협조 활성상태(620)에서 전술한 3가지 모드 중의 하나의 모드로 동작할 수 있으며 전술한 3가지 모드는 목표차량이 존재하는 지 및 목표차량이 V2V 통신으로 연결되어 있는지에 따라 결정될 수 있다. The
즉 도 4를 참조하면, 협조 활성상태(620)에서는 관심영역 내에 목표차량은 존재하지 않지만 잠재적 관심차량은 존재하는 경우 비추종모드(621)로 천이(A)하고, V2V 통신으로 연결된 목표차량이 존재하는 경우에는 근접추종모드(622)로 천이(B)하고, V2V 통신으로 연결되지 않은 목표차량이 관심영역에 존재하고, 동시에 잠재적 관심차량이 관심영역에 존재하는 경우에는 추종모드(623)로 천이(C)할 수 있다.That is, referring to FIG. 4, in the cooperative active state 620, the target vehicle does not exist in the region of interest, but when the potential vehicle of interest exists, transitions to the non-following mode 621 (A), and the target vehicle connected by V2V communication If it does exist, transition to the proximity tracking mode 622 (B), and if the target vehicle not connected by V2V communication exists in the region of interest, and at the same time, if the potential vehicle of interest exists in the region of interest, the mode of transition (B) is Transition (C) is possible.
만약 연결된 목표차량 및 잠재적 관심차량이 하나도 존재하지 않는다면 ACC 활성상태(610)로 천이할 수 있다.If none of the connected target vehicles and potential vehicles of interest exist, it may transition to the ACC
CACC 시스템(300)의 활성상태(600)에서 제어할 수 있는 최대, 최소 요구사항은 모드별 다음 표1과 같이 정의할 수 있다.The maximum and minimum requirements that can be controlled in the
타임갭Ieast
Time gap
DecelerationMaximum
Deceleration
AccelerationMaximum
Acceleration
비추종모드Cooperative active status:
Non-following mode
근접추종모드Cooperative active status:
Proximity tracking mode
근접추종모드Cooperative active status:
Proximity tracking mode
추종모드Cooperative active status:
Tracking Mode
표 1을 참조하면 CACC 시스템(300)은 최소 타임갭으로 0.5s 이하를 설정할 수 없으며, 최대 브레이크를 제어하여 5m/s^2 이상의 감속제어를 할 수 없고, 스로틀을 제어하여 2.75m/s^2 이상의 가속제어를 할 수 없다.Referring to Table 1, the
다시 도 3을 참조하면, 상태관리부(331)는 전술한 방식에 따라 CACC 시스템(300)의 상태를 관리하고, CACC 시스템(300)이 활성상태에 있으면 주행관리부(333)는 자차량의 주행 속도를 제어할 수 있다. CACC 시스템(300)의 경우 주행 속도는 일반적으로 운전자가 설정한 목표속도에 맞추어서 주행할 수 있도록 제어된다. 하지만, 목표차량이 존재하는 경우에는 목표차량을 추종할 수 있도록 주행 속도를 제어할 수 있다.Referring again to FIG. 3, the
주행 관리부(333)는 상태관리부(331)에 의한 상태 정보와 목표차량 선정부(335)로부터의 목표차량 및/또는 잠재적 관심 차량의 존재 유무를 바탕으로 자차량의 주행 속도를 제어할 수 있다. 특히 운전자의 좀 더 안전한 주행 환경을 도모하기 위하여 자차량(700)의 목표차량뿐만 아니라 목표차량의 목표차량의 주행정보도 이용하여 주행 속도를 제어하도록 할 수 있다.The
이하 도 5를 바탕으로 CACC 시스템(300)에서의 목표차량의 목표차량의 주행정보를 고려하는 주행 제어에 대하여 좀 더 상세히 살펴보기로 한다.Hereinafter, the driving control considering the driving information of the target vehicle of the target vehicle in the
도 5는 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 주행 속도 제어 과정을 설명하기 위한 도면이다.5 is a view for explaining a driving speed control process of the
도 5를 참조하면, 동일 차선의 주행대열은 선두차량(Cp2), 자차량(700)의 목표차량이 될 수 있는 선행차량(Cp1), 및 자차량(700)의 순서를 이룬다. 여기서 선두차량(Cp2)는 선행차량(Cp1)의 목표차량이 될 수 있다. 여기서 차량(Cp3)은 자차량(700)과 동일 차로를 주행하고 있지 않기 때문에 잠재적 관심 차량은 될 수 있을 뿐 목표차량은 될 수 없다.Referring to FIG. 5, the driving lanes of the same lane form the order of the head vehicle Cp2, the preceding vehicle Cp1 which can be the target vehicle of the
차량(700, Cp1, Cp2, Cp3) 간에는V2V 통신을 통해 서로의 주행정보를 주고받을 수 있다. 특히, 각 차량은 자신의 주행정보를 송신할 때 자신의 목표차량에 대한 식별자(ID)를 함께 송신할 수 있다. 즉, 차량(Cp2)은 선행하는 목표차량이 존재하지 않으므로 자신의 주행정보만 송신하고, 만약 차량(Cp2)가 차량(Cp1)의 목표차량이 된다면, 차량(Cp1)은 자신의 주행정보에 자신의 목표차량에 대한 식별자(일 예로 ID-2)를 함께 송신할 수 있다. 따라서, 자차량(700)은 목표차량인 차량(Cp1)의 주행정보와 함께 차량(Cp1)의 목표차량인 차량(Cp2)의 식별자(일례로 ID-2)정보를 수신할 수 있다. 그러면 자차량(700)에 탑재된 CACC 시스템(300)의 주행 관리부(333)는 수신한 식별자 정보를 이용하여 목표차량(Cp1)의 목표차량(Cp2)을 알 수 있고, 차량(Cp1)으로부터 받은 주행정보와 차량(Cp2)으로부터 받은 주행정보를 이용하여 자차량(700)의 주행 속도를 제어할 수 있다.
여기에서 좀 더 살펴보아야 할 점은 목표차량 선정부(335)에서 목표차량의 정확한 선정을 위하여 통신부(320)에서 수신한 주변차량으로부터 오는 데이터와 정보수집부(310)에서 수집한 선행차량 정보를 함께 이용한다는 것이다. 즉, 두 개의 정보가 일치 또는 전술한 검증 조건에 맞는 경우에만 목표차량으로 선정할 수 있다는 것이다. 특히, 목표차량의 주행 정보뿐만 아니라 목표차량의 목표차량의 주행정보를 바탕으로 속도를 제어하는 경우에는 목표차량의 목표차량도 정확하게 확인되어야만 한다.Here, the point to be looked at a little more is the target
이하 자차량의 목표차량(제1 목표차량) 및 목표차량의 목표차량(제2 목표차량)을 검증하는 방법에 대하여 좀 더 상세히 설명한다. 목표차량 선정부(335)에서 필요한 정보 중 통신부(320)를 통해 수신하는 주변차량 정보는 V2V 통신에 의하여 연결되면 바로 획득할 수 있으므로 본 발명에서는 특히 정보수집부(310)에 의한 제1 목표차량이 될 수 있는 선행차량 및 제2 목표차량이 될 수 있는 선선행차량 정보의 수집에 대하여 좀 더 상세히 설명한다.Hereinafter, a method of verifying the target vehicle (first target vehicle) of the host vehicle and the target vehicle (second target vehicle) of the target vehicle will be described in more detail. Among the information required by the target
정보수집부(310)는 선행차량 및 선 선행차량의 정보를 수집하기 위하여 카메라 및/또는 거리센서(311)를 이용할 수 있다.The
카메라는 자차량(700)의 주행 차로(W)를 결정하기 위하여 전방 영상을 획득할 수 있다. 카메라가 획득한 전방 영상은 자차량이 주행하는 차로(W) 및 이를 형성하는 차선(L)을 포함할 수 있다. 카메라는 차량의 전면에 설치될 수 있으며, CCD(charge Coupled Device) 또는 CMOS(Complementary )와 같은 촬상 센서를 포함할 수 있다.The camera may acquire a front image to determine the driving lane W of the
거리센서(311)는 자차량(700) 전방에 위치하는 물체, 예를 들면 자차량(700)의 전방에서 주행하는 선행차량 (Cp1) 및 선선행차량(Cp2), 도로 주변에 설치된 구조물 등을 포함하는 정지 물체, 반대 차선에서 다가오는 차량 등을 감지할 수 있다. 나아가, 거리센서(311)는 자차량(700) 전방의 물체와의 거리를 감지할 수 있고, 움직이는 물체일 경우에는 속도 및 가속도를 감지할 수도 있다. The
이를 위해, 거리센서(311)는 레이더(Radar) 또는 라이다(Light Detection And Ranging; LiDAR)로 구현될 수 있다. 만약, 거리센서(311)가 라이다로 구현되는 경우, 거리센서(311)는 전방 미리 정해진 영역에 레이저를 조사하고, 전방 물체로부터 반사되는 레이저를 수신할 수 있다. 레이저를 수신한 후, 거리센서(311)는 레이저의 수신 시점과 강도, 주파수의 변화, 편광 상태의 변화 등으로부터 전방 물체와의 거리, 속도, 형상 등 물리적 성질을 감지할 수 있다. 이하에서는, 설명의 편의상 거리센서(311)가 라이다로 구현되는 경우를 전제로 한다.To this end, the
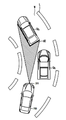
도 6a 및 도 6b는 선행차량(Cp1)의 위치에 따른 선행차량(Cp1) 및 선선행차량(Cp2)의 감지 결과를 설명하기 위한 도면으로, 빗금 영역은 거리센서(311)가 레이저를 조사하는 영역이다.6A and 6B are diagrams for explaining the detection results of the preceding vehicle Cp1 and the preceding vehicle Cp2 according to the position of the preceding vehicle Cp1, and the hatched area irradiates the laser with the
만약, 도 5와 같이 주행 차로(W) 상에 선행차량(Cp1) 및 선선행차량(Cp2)이 존재하는 경우, 자차량(700)의 거리센서(311)는 전방으로 레이저를 조사함으로써 선행차량(Cp1)을 감지할 수 있다. 선행차량(Cp1)이 자차량(700)의 주행 방향과 동일한 방향으로 주행하는 경우, 거리센서(311)는 선행차량(Cp1)의 후면을 감지할 수 있다. 또한, 선행차량(Cp1)이 조사되는 레이저의 진행 경로에 위치하는 경우, 거리센서(311)는 선행차량(Cp1)에 가려진 선선행차량(Cp2)은 감지하지 못할 수 있다.If the preceding vehicle Cp1 and the preceding vehicle Cp2 exist on the driving lane W as shown in FIG. 5, the
한편, 선행차량(Cp1)이 차로 변경을 위해 주행 차로(W)를 이탈할 수 있다. 도 6a를 참조하면, 선행차량(Cp1)이 우측으로 차로를 변경하기 위해 주행 차로(W)를 이탈할 수 있다. 그 결과, 거리센서(311)는 차로 변경 중인 선행차량(Cp1)의 후면과 선행차량(Cp1)의 전방에 위치한 선선행차량(Cp2)의 후면 중 일부를 감지할 수 있다. 도 6a에서, d1은 거리센서(311)에 의해 감지된 선행차량(Cp1)의 후면 영역을 의미하고, d2는 거리센서(311)에 의해 감지된 선선행차량(Cp2)의 후면 영역을 의미할 수 있다.Meanwhile, the preceding vehicle Cp1 may leave the driving lane W to change the lane. Referring to FIG. 6A, the preceding vehicle Cp1 may exit the driving lane W to change the lane to the right. As a result, the
여기서, d2는 선행차량(Cp1)의 위치에 의해 달라질 수 있다. 도 6b는 도 6a 보다 선행차량(Cp1)이 우측으로 더 이동한 경우를 예시한다. 이때, 거리센서(311)에 의해 감지되는 선선행차량(Cp2)의 후면 영역이 도 6a의 경우와 상이함을 확인할 수 있다.Here, d2 may be changed by the position of the preceding vehicle Cp1. FIG. 6B illustrates a case in which the preceding vehicle Cp1 moves further to the right than in FIG. 6A. At this time, it can be seen that the rear area of the preceding vehicle Cp2 sensed by the
이와 같은 거리센서(311)의 감지 결과는 목표차량 선정부(335)에서 제1 목표차량(Cp1) 및 선선행차량(Cp2)의 존재를 결정하는데 이용될 수 있다.The detection result of the
목표차량 선정부(335)는 거리센서(311)의 감지 결과를 기초로 주행 차로(W)와 동일한 차로를 주행하는 선행차량(Cp1) 및 선선행차량(Cp2)의 존재를 결정할 수 있다. 상술한 바와 같이, 선행차량(Cp1) 및 선선행차량(Cp2)은 주행 차로(W)와 동일한 차로를 주행해야 하므로, 먼저 목표차량 선정부(335)는 주행 차로(W)를 결정할 수 있다.The target
이를 위해, 목표차량 선정부(335)는 카메라(200)에서 획득한 전방 영상을 이용할 수 있다. 목표차량 선정부(335)는 전방 영상에서 차선(L)을 명확히 하도록 전방 영상을 처리할 수 있다. 이를 통해, 목표차량 선정부(335)는 전방 영상의 중앙에 가장 인접한 좌측 및 우측 차선(L)을 추출하고, 이들이 형성하는 차로를 주행 차로(W)로 결정할 수 있다.To this end, the target
주행 차로(W)가 결정되면, 목표차량 선정부(335)는 거리센서(311)에 의해 감지된 전방 물체 중 주행 차로(W)에 위치하는 물체가 선행차량(Cp1), 또는 선선행차량(Cp2)인지 결정할 수 있다. 구체적으로, 목표차량 선정부(335)는 선행차량(Cp1)의 존재를 먼저 결정한 후, 결정된 선행차량(Cp1)의 위치를 이용하여 선선행차량(Cp2)의 존재를 결정할 수 있다.When the driving lane (W) is determined, the target
선행차량(Cp1)을 결정하기 위해, 목표차량 선정부(335)는 미리 정해진 제1 기준 폭을 이용할 수 있다. 여기서, 제1 기준 폭이란, 거리센서(311)에 의해 감지된 물체 중 선행차량(Cp1)으로 결정할 수 있는 최소 폭을 의미할 수 있다. 제1 기준 폭은 후술할 저장부에 미리 저장되거나, 사용자의 입력 또는 목표차량 선정부(335)의 연산에 의해 미리 결정될 수 있다.In order to determine the preceding vehicle Cp1, the target
자차량(700)의 주행 방향과 동일한 방향으로 선행차량(Cp1)이 주행 하거나, 자차량(700)의 주행 방향으로부터 선행차량(Cp1)의 주행 방향이 크게 벗어나지 않으면, 거리센서(311)는 선행차량(Cp2)의 후면을 감지할 수 있다. 도 6a를 참조하면, 거리센서(311)는 선행차량(Cp1)의 후면 영역d1을 감지할 수 있으며, d1은 직선 형태로 나타날 수 있다. 이때, d1의 길이는 선행차량(Cp1)의 폭을 의미할 수 있다.If the preceding vehicle Cp1 travels in the same direction as the traveling direction of the
이와는 달리, 자차량(700)의 주행 방향으로부터 선행차량(Cp1)이 크게 이탈하였다면, 거리센서(311)는 선행차량(Cp1)의 후면 및 측면 일부를 감지할 수 있다. 도 6b를 참조하면, 거리센서(311)는 선행차량(Cp1)의 후면 영역과 측면 일부 영역d1을 감지할 수 있고, d1은 L자 형태로 나타날 수 있다. 이때, L자 형태의 d1을 이루는 두 개의 직선 중 어느 하나의 길이는 선행차량(Cp1)의 폭을 의미할 수 있다.On the other hand, if the preceding vehicle Cp1 is largely deviated from the driving direction of the
따라서, 목표차량 선정부(335)는 주행 차로(W) 상의 검출된 물체의 폭이 제1 기준 폭 이상인지 확인함으로써 선행차량(Cp1)의 존재를 결정할 수 있다. 구체적으로, 목표차량 선정부(335)는 전방으로부터 가장 인접한 순서대로 검출된 물체의 폭이 제1 기준 폭 이상인지 확인할 수 있다. 그 결과, 목표차량 선정부(335)는 제1 기준 폭 이상의 폭을 가지는 전방으로부터 가장 인접한 물체를 선행차량(Cp1)으로 결정할 수 있다.Accordingly, the target
선행차량(Cp1)이 결정되면, 목표차량 선정부(335)는 선행차량(Cp1)의 위치에 기초하여 선선행차량(Cp2)을 결정할 수 있다. 도 6a 및 6b에서 설명한 바와 같이, 선행차량(Cp1)의 위치에 따라 선선행차량(Cp2)의 감지 영역d2가 달라지므로, 목표차량 선정부(335)는 결정된 선행차량(Cp1)의 위치에 따라 선선행차량(Cp2)을 결정할 수 있다.When the preceding vehicle Cp1 is determined, the target
구체적으로, 목표차량 선정부(335)는 선행차량(Cp1)의 위치에 따라 결정되는 제2 기준 폭 이상의 폭을 가지는 물체를 선선행차량(Cp2)으로 결정할 수 있다. 이를 위해, 목표차량 선정부(335)는 선행차량(Cp1)의 위치를 이용하여 제2 기준 폭을 먼저 결정할 수 있다.Specifically, the target
도 7은 선행차량(Cp1)이 우측으로 차로 변경 중인 경우를 예시하며, 이를 참조하여 제2 기준 폭을 결정하는 방법을 설명한다, 도 7에서 레이저가 조사되는 거리센서(311)의 위치가 원점임을 전제로 한다.FIG. 7 illustrates a case in which the preceding vehicle Cp1 is being changed to the right side and describes a method of determining the second reference width with reference to this. In FIG. 7, the position of the
먼저, 목표차량 선정부(335)는 선행차량(Cp1)의 좌측 후방 모서리 좌표 P1(preV_x, preV_y)를 획득한다. 도 6a와 같이, 선행차량(Cp1)의 감지 영역d1이 직선으로 감지되면, 목표차량 선정부(335)는 직선 d1의 좌측 끝을 P1으로 설정할 수 있다. 이와는 달리, 도 6b처럼, 선행차량(Cp1)의 감지 영역 d1이 L자 형태로 감지되면, 목표차량 선정부(335)는d1의 꼭지점을 P1으로 설정할 수 있다.First, the target
그 다음, 목표차량 선정부(335)는 선선행차량(Cp2)이 주행 차로(W) 상에서 가장 우측에 위치할 때를 가정하고, 선선행차량(Cp2)의 좌측 후방 모서리 좌표P2(pre_preV_x, pre_preV_y)를 획득한다.Next, the target
P1과 P2를 획득한 후, 목표차량 선정부(335)는 원점으로부터 P1을 지나는 직선과 X=pre_preV_x 와의 교점P3(intersect_x, intersect_y)를 획득할 수 있다.After obtaining P1 and P2, the target
마지막으로, 목표차량 선정부(335)는P2와P3의 거리를 제2 기준 폭k로 결정할 수 있다. 구체적으로, 목표차량 선정부(335)는 수학식 3에 따라 제2 기준 폭 k를 획득할 수 있다.Finally, the target
![]()
![]()
여기서, k는 제2 기준 폭을 의미하고, intersect_x는 P3의 x좌표를 의미하며, pre_preV_x는 P2의 x좌표를 의미할 수 있다.Here, k means the second reference width, intersect_x means the x coordinate of P3, and pre_preV_x means the x coordinate of P2.
지금까지는 선행차량(Cp1)이 우측으로 차로를 변경하는 경우를 전제로 설명하였으나, 선행차량(Cp1)이 좌측으로 차로 변경시에도 이와 유사한 방법으로 제2 기준 폭을 획득할 수 있다.So far, it has been described on the premise that the preceding vehicle Cp1 changes the lane to the right, but when the preceding vehicle Cp1 changes to the left, the second reference width can be obtained in a similar manner.
제2 기준 폭을 획득한 후, 목표차량 선정부(335)는 주행 차로(W) 상의 감지된 물체 중 제2 기준 폭 이상의 물체를 선선행차량(Cp2)으로 결정할 수 있다. 일 실시예에 따른 자차량(700)의 목표차량 선정부(335)는 일 시점에서 제2 기준 폭 이상의 물체를 선선행차량(Cp2)으로 결정할 수 있다. After acquiring the second reference width, the target
또한, 다른 실시예에 따른 자차량(700)의 목표차량 선정부(335)는 미리 정해진 기준 시간 동안 제2 기준 폭 이상의 폭을 유지하는 물체를 선선행차량(Cp2)으로 결정할 수 있다. 이를 통해, 선선행차량(Cp2)에 대한 결정 정확도를 높일 수 있다.In addition, the target
특히, 목표차량 선정부(335)는 미리 정해진 기준 시간 동안 제2 기준 폭 이상의 폭을 가지고, 감지되는 폭이 증가하는 물체를 선선행차량(Cp2)으로 결정할 수 있다. 도 6a 및 6b와 같이, 선행차량(Cp1)이 차로 변경이 진행될수록 선선행차량(Cp2)의 감지 영역d2가 증가할 수 있다. 따라서, 폭의 증가 여부를 고려함으로써, 목표차량 선정부(335)는 선행차량(Cp1)의 주행 차로(W) 이탈 시에는 선선행차량(Cp2)의 존재를 좀 더 쉽게 결정할 수 있다.In particular, the target
또한, 목표차량 선정부(335)는 제2 기준 폭 이상의 폭을 가지는 물체가 복수 개 감지되면, 결정된 선행차량(Cp1)에 가장 인접한 물체를 선선행차량(Cp2)으로 결정할 수 있다. 상술한 바와 같이, 선선행차량(Cp2)은 선행차량(Cp1)의 목표차량이 되어야 하므로, 목표차량 선정부(335)는 제2 기준 폭 이상의 폭을 가지는 물체 중 선행차량(Cp1)의 바로 전방에 위치하는 물체를 선선행차량(Cp2)으로 결정할 수 있다.In addition, when a plurality of objects having a width greater than or equal to the second reference width is detected, the target
선행차량(Cp1) 및 선선행차량(Cp2)이 결정되면, 목표차량 선정부(335)는 통신부(320)를 통해 획득한 주변 차량의 정보와 상술한 것처럼 자차량(700)의 센서를 이용하여 수집한 선행차량(Cp1) 및 선선행차량(Cp2)의 정보를 이용하여 상술한 검증을 통과하면 제1 목표차량 및 제2 목표차량으로 결정함으로써 선정의 신뢰성을 높일 수 있다.When the preceding vehicle Cp1 and the preceding vehicle Cp2 are determined, the target
목표차량 선정부(335)에 의해 제1 목표차량(Cp1) 및 제2 목표차량(Cp2)이 선정 되면, 주행관리부(333)는 제1 목표차량(Cp1) 및 제2 목표차량(Cp2)의 주행 정보에 따라 결정되는 주행 속도로 주행하도록 구동부를 제어할 수 있다. 여기서, 주행 정보란 속도, 가속도, 위치 등과 같은 주행에 관련된 모든 정보를 포함할 수 있다.When the first target vehicle Cp1 and the second target vehicle Cp2 are selected by the target
이를 위해, 주행관리부(333)는 제1 목표차량(Cp1)의 주행 정보에 대응되는 제1 주행 속도 및 제2 목표차량(Cp2)의 주행 정보에 대응되는 제2 주행 속도를 정보수집부(310) 및/또는 통신부(320)를 통해 획득할 수 있다. 구체적으로, 주행관리부(333)는 제1 목표차량(Cp1)과 제1 안전 거리를 유지할 수 있는 제1 주행 속도를 획득하고, 제2 목표차량(Cp2)과 제2 안전 거리를 유지할 수 있는 제2 주행 속도를 획득할 수 있다. To this end, the
마지막으로, 주행관리부(333)는 제1 주행 속도 및 제2 주행 속도 중 어느 하나에 따라 주행하도록 구동부를 제어할 수 있다. 구체적으로, 주행관리부(333)는 제1 주행 속도 및 제2 주행 속도 중 작은 값에 따라 주행하도록 구동부를 제어할 수 있다. Finally, the
이를 통해, 개시된 실시예에 따른 CACC 시스템(300)은 제1 목표차량(Cp1)이 차로를 이탈하더라도, 제2 목표차량(Cp2)과의 관계에서 안전 거리를 유지하며 주행하도록 자차량(700)을 제어할 수 있다.Through this, the
한편, 주행관리부(333)는 제1 목표차량(Cp1)의 주행 차로(W) 이탈 시에만, 제1 목표차량(Cp1) 및 제2 목표차량(Cp2)의 주행 정보에 따라 결정되는 주행 속도로 주행하도록 구동부를 제어할 수 있다. 제1 목표차량(Cp1)의 주행 차로(W) 이탈 여부를 결정하기 위해, 주행관리부(333)는 제1 목표차량(Cp1)의 속도 및 위치를 이용할 수 있다. 구체적으로, 주행관리부(333)는 전방 영상을 통해 획득한 주행 차로(W)를 형성하는 차선(L)에 대한 제1 목표차량(Cp1)의 속도 및 위치를 이용하여 차로 이탈 여부를 결정할 수 있다.On the other hand, the
이를 통해, 개시된 실시예에 따른 자차량(700)은 제1 목표차량(Cp1)의 차로 이탈 여부에 적응적인 주행 속도를 결정할 수 있다.Through this, the
지금까지는, 주행 차로(W)가 직선 또는 직선에 유사한 곡률을 가지는 경우를 전제로 설명하였다. 이와는 달리, 주행 차로(W)가 큰 곡률을 가지는 경우에도, 목표차량 선정부(335)는 유사하게 선행차량 및 선선행차량을 감지하여 제1 목표차량 및 제2 목표차량을 선정할 수 있다.So far, the description has been made on the premise that the driving lane W has a straight line or a similar curvature to the straight line. Alternatively, even when the driving lane W has a large curvature, the target
도 8은 곡선 주행 차로에 대하여 선행차량의 위치에 따른 선행차량 및 선선행차량의 감지 결과를 설명하기 위한 도면이다.8 is a view for explaining the detection results of the preceding vehicle and the preceding vehicle according to the position of the preceding vehicle with respect to the curved driving lane.
직선 주행 차로(W)에 비해, 곡선 주행 차로(W)를 주행하는 자차량(700)은 사고의 위험이 더 클 수 있다. 따라서, 곡선 주행 차로(W)의 주행 시, 자차량(700)은 선행차량(Cp1)뿐만 아니라 선선행차량(Cp2)의 주행 속도까지 고려하여 주행 속도를 결정할 필요가 있다.Compared to the straight driving lane W, the
주행 차로(W)가 결정되면, 목표차량 선정부(335)는 주행 차로(W)의 곡률이 미리 정해진 기준 곡률 이상인지 결정할 수 있다. 여기서 미리 정해진 기준 곡률이란 곡선 주행 차로(W)가 가지는 최소 곡률을 의미할 수 있다.When the driving lane W is determined, the target
만약, 주행 차로(W)의 곡률이 미리 정해진 기준 곡률 이상이면, 목표차량 선정부(335)는 곡선 주행 차로(W)에 대응되는 방법으로 선선행차량(Cp2)을 결정할 수 있다. 도 6a 및 6b와 도 7을 통해 설명한 방법에 따라 선행차량(Cp1)을 결정한 후, 목표차량 선정부(335)는 제2 기준 폭 이상의 물체 중 거리 센서에 의해 복수의 면이 감지된 물체를 선선행차량(Cp2)으로 결정할 수 있다.If the curvature of the driving lane W is equal to or greater than a predetermined reference curvature, the target
도 8을 참조하면, 곡선 주행 차로(W)를 주행하는 경우, 거리 센서에 의한 선선행차량(Cp2)의 감지 영역d2는L자 형태로 형성될 수 있다. 다시 말해, 곡선 주행 차로(W)에서 거리 센서는 제2 목표차량(Cp2)의 후면 및 일 측면을 함께 감지할 수 있다. Referring to FIG. 8, when driving on a curved driving lane W, the sensing area d2 of the preceding vehicle Cp2 by the distance sensor may be formed in an L shape. In other words, in the curved driving lane W, the distance sensor may sense the rear surface and one side of the second target vehicle Cp2 together.
이와 같은 방법으로 목표차량 선정부(335)에서 선행차량(Cp1) 및 선선행차량 (Cp2)을 감지하고, 이를 바탕으로 제1 목표차량 및 제2 목표차량을 선정하면, 주행관리부(333)는 앞서 설명한 바와 같은 방법에 따라 주행 속도를 결정할 수 있다.In this way, when the target
이처럼, 주행 차로(W)의 곡률을 고려함으로써, 개시된 실시예에 따른 자차량(700)은 곡선 차로 주행 시에도 안전 거리 확보를 위한 주행 속도를 결정할 수 있다.As described above, by considering the curvature of the driving lane W, the
다시 도 3을 참조하면, 자차량(700)의 제어에 이용되는 정보는 저장부(미도시)에 미리 저장될 수 있다. 예를 들어, 저장부에는 선행차량(Cp1)을 결정하는데 이용되는 제1 기준 폭을 미리 저장할 수 있다. 또한, 저장부에는 선선행차량(Cp2)을 결정하는데 이용되는 제2 기준 폭을 구하는 알고리즘이 미리 저장될 수도 있다. 또한, 저장부에는 곡선 주행 차로(W)를 결정하는데 이용되는 기준 곡률이 미리 저장될 수도 있고, 상술한 기준 시간이 미리 저장될 수도 있다.Referring back to FIG. 3, information used for the control of the
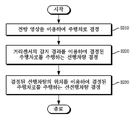
도 9는 본 발명의 일 실시예에 따른 CACC 시스템(300)에서 자차량의 주행 속도를 제어하는 흐름도이다.9 is a flowchart for controlling the driving speed of the host vehicle in the
도 9를 참조하면, CACC 시스템(300)은V2V 통신을 이용하여 주변차량의 차량정보를 획득(S100)할 수 있다. 차량정보에는 GPS에 의한 위치정보, 속도, 가속도 등의 정보를 포함할 수 있고, 이에 더하여 각 주변차량이 주행하고 있는 도로에 관한 정보도 포함될 수 있다.Referring to FIG. 9, the
그리고 CACC 시스템(300)은 자차량(700)에 부착되어 있는 카메라, 거리센서 등을 이용하여 자차량(700)의 전방에 주행하고 있는 선행차량 및 선선행차량을 결정(S200)할 수 있다. 그리고 V2V 통신으로 획득한 주변차량 정보와 자차량의 센서들을 이용하여 결정한 선행차량 및 선선행차량을 비교하여 제1 목표차량 및 제2 목표차량을 결정(S300)할 수 있다. 여기서 제1 목표차량은 자차량(700)이 추종하는 목표차량이 되고 제2 목표차량은 제1 목표차량이 추종하는 목표차량이 된다. CACC 시스템(300)은 이렇게 제1 목표차량과 제2 목표차량을 결정한 후 제1 목표차량과 제2 목표차량의 주행정보를 이용하여 자차량의 주행속도를 결정(S400)하고, 결정된 주행속도에 따라 자차량의 주행을 제어(S500)할 수 있다. 여기서 주행정보는 속도, 가속도 위치 등을 포함하는 제1 목표차량 및 제2 목표차량 관련 모든 정보일 수 있다.In addition, the
상술한 방식에 개시된 실시예에 따른 CACC시스템(300)은 제1 목표차량(Cp1) 및 제2 목표차량(Cp2)를 모두 고려하여 안전을 확보할 수 있다.The
도 10은 본 발명의 일 실시예에 따른 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다.10 is a flowchart of determining a preceding vehicle and a preceding vehicle using a sensor of a host vehicle in the
CACC 시스템(300)은 먼저 전방 영상을 이용하여 주행 차로(W)를 결정(S210)할 수 있다. 구체적으로, CACC 시스템(300)은 정보수집부(310)를 통해 카메라를 이용하여 차로 정보를 포함하는 전방 영상을 획득할 수 있고, 영상 처리를 통해 차로를 추출함으로써, 주행 차로(W)를 결정할 수 있다.The
주행 차로(W)가 결정되면, CACC 시스템(300)은 거리센서(311)의 감지 결과를 이용하여 주행 차로(W)를 주행하는 선행차량을 결정(S220)할 수 있다. 이를 위해, CACC 시스템(300)은 거리센서(311)에 의해 감지된 주행 차로(W) 상의 물체 중 미리 정해진 제1 기준 폭 이상의 물체를 선행차량(Cp1)으로 결정할 수 있다. When the driving lane W is determined, the
그 다음, CACC 시스템(300)은 결정된 선행차량 (Cp1)의 위치를 이용하여 주행 차로(W)를 주행하는 선선행차량(Cp2)을 결정(S230)할 수 있다 이를 위해, CACC 시스템(300)은 선행차량(Cp1)의 위치에 대응되는 제2 기준 폭을 획득할 수 있다. 제2 기준폭을 획득한 후, CACC 시스템(300)은 거리센서(311)에 의해 감지된 주행 차로(W) 상의 물체 중 제2 기준 폭 이상의 물체를 선선행차량(Cp2)으로 결정할 수 있다.Then, the
CACC 시스템(300)은 이렇게 결정된 선행차량(Cp1) 및 선선행차량(Cp2)을 통신부(320)를 통해 획득한 주변차량의 정보와 비교하여 제1 목표차량 및 제2 목표차량으로 결정(S300)할 수 있다.The
이하에서는, 주행 차로(W)가 직선인 경우와 곡선인 경우를 구분하여 CACC 시스템(300)의 제어방법을 상세히 설명한다.Hereinafter, the control method of the
도 11는 본 발명의 일 실시 예에 따른 직선 주행 차로에 대하여 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다. 11 is a flowchart of determining a preceding vehicle and a preceding vehicle using a sensor of a host vehicle in the
도 11을 참고하면, CACC 시스템(300)은 전방 영상을 이용하여 주행 차로(W)를 결정(S210)할 수 있다 구체적으로, CACC 시스템(300)은 카메라를 이용하여 차로 정보를 포함하는 전방 영상을 획득할 수 있고, 영상 처리를 통해 차로를 추출함으로써, 주행 차로(W)를 결정할 수 있다.Referring to FIG. 11, the
주행 차로(W)가 결정되면, CACC 시스템(300)은 거리센서(311)의 감지 결과를 이용하여 주행 차로(W)를 주행하는 선행차량(Cp1)을 결정(S220)할 수 있다. 이를 위해, CACC 시스템(300)은 거리센서(311)에 의해 감지된 주행 차로(W) 상의 물체 중 미리 정해진 제1 기준 폭 이상의 물체를 선행차량(Cp1)으로 결정할 수 있다. When the driving lane W is determined, the
CACC 시스템(300)은 결정된 선행차량(Cp1)의 위치를 이용하여, 선선행차량(Cp2)으로 결정할 수 있는 최소 기준 폭, 즉 제2 기준 폭을 결정(S231)할 수 있다. 도 7에서 설명한 바와 같이, CACC 시스템(300)은 거리센서(311)의 위치를 원점으로 P1, P2, P3의 위치를 확인하고, 수학식 1에 따라 제2 기준 폭을 확인할 수 있다.The
제2 기준 폭이 확인되면, CACC 시스템(300)은 거리센서(311)에 의해 감지된 물체 중 기준 폭 이상의 물체를 확인(S232)할 수 있다. 또한, CACC 시스템(300)은 기준 시간 동안 확인된 물체가 제2 기준 폭 이상의 폭을 가지는지 확인(S233)할 수 있다.When the second reference width is confirmed, the
만약, 기준 시간 동안 확인된 물체가 제2 기준 폭 이상의 폭을 갖지 않는다면, CACC 시스템(300)은 확인된 물체를 선선행차량으로 결정하지 않고 종료한다.If the object identified during the reference time does not have a width equal to or greater than the second reference width, the
반면, 기준 시간 동안 확인된 물체가 제2 기준 폭 이상의 폭을 갖는다면, CACC 시스템(300)은 확인된 물체를 선선행차량(Cp2)으로 결정(S234)할 수 있다.On the other hand, if the object identified during the reference time has a width equal to or greater than the second reference width, the
도 12는 본 발명의 일 실시 예에 따른 곡선 주행 차로에 대하여 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다.12 is a flowchart for determining a preceding vehicle and a preceding vehicle using a sensor of a host vehicle in the
도 12를 참고하면, CACC 시스템(300)은 전방 영상을 이용하여 주행 차로(W)를 결정(S210)할 수 있다 구체적으로, CACC 시스템(300)은 카메라를 이용하여 차로 정보를 포함하는 전방 영상을 획득할 수 있고, 영상 처리를 통해 차로를 추출함으로써, 주행 차로(W)를 결정할 수 있다.Referring to FIG. 12, the
주행 차로(W)가 결정되면, CACC 시스템(300)은 거리센서(311)의 감지 결과를 이용하여 주행 차로(W)를 주행하는 선행차량(Cp1)을 결정(S220)할 수 있다. 이를 위해, CACC 시스템(300)은 거리센서(311)에 의해 감지된 주행 차로(W) 상의 물체 중 미리 정해진 제1 기준 폭 이상의 물체를 선행차량(Cp1)으로 결정할 수 있다. When the driving lane W is determined, the
CACC 시스템(300)은 결정된 선행차량(Cp1)의 위치를 이용하여, 선선행차량(Cp2)으로 결정할 수 있는 최소 기준 폭, 즉 제2 기준 폭을 결정(S231)할 수 있다. 도 7에서 설명한 바와 같이, CACC 시스템(300)은 거리센서(311)의 위치를 원점으로 P1, P2, P3의 위치를 확인하고, 수학식 1에 따라 제2 기준 폭을 확인할 수 있다.The
제2 기준 폭이 확인되면, CACC 시스템(300)은 거리센서(311)에 의해 감지된 물체 중 기준 폭 이상의 물체를 확인(S232)할 수 있다. 또한, CACC 시스템(300)은 확인된 물체의 복수의 면이 거리센서(311)에 의해 감지되었는지 확인(S235)할 수 있다.When the second reference width is confirmed, the
만약, 확인된 물체의 복수의 면이 감지되지 않았다면, CACC 시스템(300)은 확인된 물체를 선선행차량으로 결정하지 않고 종료한다.If a plurality of surfaces of the identified object are not detected, the
반면, 확인된 물체의 복수의 면이 감지되지 않았다면, CACC 시스템(300)은 확인된 물체를 선선행차량(Cp2)으로 결정(S234)할 수 있다.On the other hand, if a plurality of surfaces of the identified object are not detected, the
상술한 바와 같이 본 발명에서 제시하는 CACC 시스템은 제1 목표차량뿐만 아니라 제1 목표차량의 목표차량인 제2 목표차량까지도 고려하여 속도를 제어함으로써 운전자에게 안전한 주행 환경을 제공할 수 있을 것이다. As described above, the CACC system proposed in the present invention may provide a safe driving environment to the driver by controlling the speed in consideration of not only the first target vehicle but also the second target vehicle that is the target vehicle of the first target vehicle.
한편, 본 명세서에서는 설명의 편의상 CACC를 예시로 하고 있음이 이해되어야 한다. CACC는 여러 개의 ADAS 기능들 중의 하나에 불과하며, 본 발명이 제시하는 CACC 구현은 관련되는 다른ADAS 기능을 구현하기 위해서도 이용될 수 있음이 이해되어야 한다. 예를 들어, 본 발명에 제시하는 방식은 CACC, ACC(Adaptive Cruise Control), LCDAS(Lane Change Decision Aid System), LDWS(Lane Departure Warning System), LKAS(Lane Keeping Assistance System), RBDPS(Road Boundary Departure Prevention System), PDCMS(Pedestrian Detection and Collision Mitigation System), CSWS(Curve Speed Warning System), FVCWS(Forward Vehicle Collision Warning System), LSF(Low Speed Following) 등의 ADAS 기능들 중에서 하나의 기능 또는 복수 개의 기능의 결합을 구현하기 위해서도 사용될 수 있다.On the other hand, it should be understood that this specification uses CACC as an example for convenience of description. It should be understood that CACC is only one of several ADAS functions, and the CACC implementation presented by the present invention can also be used to implement other related ADAS functions. For example, the methods presented in the present invention include CACC, Adaptive Cruise Control (ACC), Lane Change Decision Aid System (LCAS), Lane Departure Warning System (LDWS), Lane Keeping Assistance System (LKAS), and Road Boundary Departure (RBDPS). Prevention System, PDCMS (Pedestrian Detection and Collision Mitigation System), CSWS (Curve Speed Warning System), FVCWS (Forward Vehicle Collision Warning System), LSF (Low Speed Following), etc. It can also be used to implement a combination of.
하나 이상의 예시적인 실시 예에서, 설명한 기능들은 하드웨어, 소프트웨어, 펌웨어, 또는 이들의 임의의 조합으로 구현될 수 있다. 소프트웨어로 구현된다면, 이 기능들은 컴퓨터 판독 가능 매체상에 하나 이상의 명령 또는 코드로서 저장 또는 전송될 수 있다. 컴퓨터 판독 가능 매체는 한 장소에서 다른 장소로 컴퓨터 프로그램의 전달을 용이하게 하는 임의의 매체를 포함하는 통신 매체 및 컴퓨터 저장 매체를 모두 포함한다. 저장 매체는 컴퓨터에 의해 액세스 가능한 임의의 이용 가능한 매체일 수 있다. 한정이 아닌 예시로, 이러한 컴퓨터 판독 가능 매체는 RAM, ROM, EEPROM, CD-ROM이나 다른 광디스크 저장소, 자기 디스크 저장소 또는 다른 자기 저장 디바이스, 또는 명령이나 데이터 구조의 형태로 원하는 프로그램코드를 전달 또는 저장하는데 사용될 수 있으며 컴퓨터에 의해 액세스 가능한 임의의 다른 매체를 포함할 수 있다. 또한, 임의의 접속이 컴퓨터 판독 가능 매체로 적절히 지칭된다. 예를 들어, 소프트웨어가 동축 케이블, 광섬유 케이블, 꼬임 쌍선, 디지털 가입자 회선(DSL), 또는 적외선, 라디오 및 초고주파와 같은 무선 기술을 이용하여 웹사이트, 서버 또는 다른 원격 소스로부터 전송된다면, 동축 케이블, 광섬유 케이블, 꼬임 쌍선, DSL, 또는 적외선, 라디오 및 초고주파와 같은 무선 기술들이 매체의 정의에 포함된다. 여기서 사용된 것과 같은 디스크(disk 및 disc)는 콤팩트디스크(CD), 레이저 디스크, 광디스크, 디지털 다목적 디스크(DVD), 플로피디스크 및 블루레이 디스크를 포함하며, 디스크(disk)들은 보통 데이터를 자기적으로 재생하는 반면, 디스크(disc)들은 데이터를 레이저에 의해 광학적으로 재생한다. 상기의 조합들 또한 컴퓨터 판독 가능 매체의 범위 내에 포함되어야 한다.In one or more exemplary embodiments, the described functions may be implemented in hardware, software, firmware, or any combination thereof. If implemented in software, these functions may be stored or transmitted as one or more instructions or codes on a computer readable medium. Computer-readable media includes both computer storage media and communication media including any medium that facilitates transfer of a computer program from one place to another. The storage medium can be any available medium that can be accessed by a computer. By way of example, and not limitation, such computer-readable media can transmit or store desired program code in the form of RAM, ROM, EEPROM, CD-ROM or other optical disk storage, magnetic disk storage or other magnetic storage device, or command or data structure. And any other media that can be accessed by a computer. Also, any connection is properly termed a computer-readable medium. For example, if the software is transmitted from a website, server, or other remote source using coaxial cable, fiber optic cable, twisted pair, digital subscriber line (DSL), or wireless technologies such as infrared, radio and microwave, Wireless technologies such as fiber optic cable, twisted pair, DSL, or infrared, radio and microwave are included in the definition of the medium. Disks (disks and discs) as used herein include compact discs (CDs), laser discs, optical discs, digital versatile discs (DVDs), floppy discs, and Blu-ray discs. Discs are played back optically by laser. Combinations of the above should also be included within the scope of computer readable media.
실시 예들이 프로그램 코드나 코드 세그먼트들로 구현될 때, 코드 세그먼트는 프로시저, 함수, 서브프로그램, 프로그램, 루틴, 서브루틴, 모듈, 소프트웨어 패키지, 클래스, 또는 명령들, 데이터 구조들, 또는 프로그램 명령문들의 임의의 조합을 나타낼 수 있는 것으로 인식해야 한다. 코드 세그먼트는 정보, 데이터, 인수(argument), 파라미터 또는 메모리 콘텐츠를 전달 및/또는 수신함으로써 다른 코드 세그먼트 또는 하드웨어 회로에 연결될 수 있다. 정보, 인수, 파라미터, 데이터 등은 메모리 공유, 메시지 전달, 토큰 전달, 네트워크 송신 등을 포함하는 임의의 적당한 수단을 이용하여 전달, 발송 또는 전송될 수 있다. 추가로, 어떤 측면들에서 방법 또는 알고리즘의 단계들 및/또는 동작들은 컴퓨터 프로그램 물건으로 통합될 수 있는 기계 판독 가능 매체 및/또는 컴퓨터 판독 가능 매체상에 코드들 및/또는 명령들 중 하나 또는 이들의 임의의 조합이나 세트로서 상주할 수 있다.When embodiments are implemented as program code or code segments, a code segment is a procedure, function, subprogram, program, routine, subroutine, module, software package, class, or instruction, data structures, or program statement It should be appreciated that any combination of these can be represented. The code segment can be coupled to other code segments or hardware circuitry by passing and / or receiving information, data, arguments, parameters or memory content. Information, arguments, parameters, data, etc. may be delivered, sent or transmitted using any suitable means including memory sharing, message delivery, token delivery, network transmission, and the like. Additionally, in some aspects the steps and / or actions of a method or algorithm are one or these of codes and / or instructions on a machine-readable medium and / or computer-readable medium that can be incorporated into a computer program product. It can reside as any combination or set of.
소프트웨어에서 구현에서, 여기서 설명한 기술들은 여기서 설명한 기능들을 수행하는 모듈들(예를 들어, 프로시저, 함수 등)로 구현될 수 있다. 소프트웨어 코드들은 메모리 유닛들에 저장될 수 있으며 프로세서들에 의해 실행될 수 있다. 메모리 유닛은 프로세서 내에 구현될 수도 있고 프로세서 외부에 구현될 수 있으며, 이 경우 메모리 유닛은 공지된 바와 같이 다양한 수단에 의해 프로세서에 통신 가능하게 연결될 수 있다.In implementation in software, the techniques described herein may be implemented in modules (eg, procedures, functions, etc.) that perform the functions described herein. The software codes can be stored in memory units and executed by processors. The memory unit may be implemented within the processor or external to the processor, in which case the memory unit may be communicatively coupled to the processor by various means as is known.
하드웨어 구현에서, 처리 유닛들은 하나 이상의 주문형 집적 회로(ASIC), 디지털 신호 프로세서(DSP), 디지털 신호 처리 디바이스(DSPD), 프로그래밍 가능 로직 디바이스(PLD), 현장 프로그래밍 가능 게이트 어레이(FPGA), 프로세서, 제어기, 마이크로컨트롤러, 마이크로프로세서, 여기서 설명한 기능들을 수행하도록 설계된 다른 전자 유닛들, 또는 이들의 조합 내에 구현될 수 있다.In a hardware implementation, processing units include one or more application specific integrated circuits (ASICs), digital signal processors (DSPs), digital signal processing devices (DSPDs), programmable logic devices (PLDs), field programmable gate arrays (FPGAs), processors, It may be implemented in a controller, microcontroller, microprocessor, other electronic units designed to perform the functions described herein, or a combination thereof.
상술한 것은 하나 이상의 실시 예의 실례를 포함한다. 물론, 상술한 실시 예들을 설명할 목적으로 컴포넌트들 또는 방법들의 가능한 모든 조합을 기술할 수 있는 것이 아니라, 당업자들은 다양한 실시 예의 많은 추가 조합 및 치환이 가능함을 인식할 수 있다. 따라서 설명한 실시 예들은 첨부된 청구범위의 진의 및 범위 내에 있는 모든 대안, 변형 및 개조를 포함하는 것이다. 더욱이, 상세한 설명 또는 청구범위에서 "포함한다"라는 용어가 사용되는 범위에 대해, 이러한 용어는 "구성되는"이라는 용어가 청구범위에서 과도적인 단어로 사용될 때 해석되는 것과 같이 "구성되는"과 비슷한 식으로 포함되는 것이다.What has been described above includes examples of one or more embodiments. Of course, it is not possible to describe all possible combinations of components or methods for the purpose of describing the above-described embodiments, but those skilled in the art can recognize that many additional combinations and substitutions of various embodiments are possible. Accordingly, the described embodiments are intended to cover all alternatives, modifications and variations that are within the spirit and scope of the appended claims. Moreover, for the extent to which the term “comprises” is used in the description or claims, these terms are similar to “consisting of” as the term “consisting of” is interpreted when used as a transitional word in the claims. It is included in the formula.
여기서 사용된 바와 같이, "추론하다" 또는 "추론"이라는 용어는 일반적으로 이벤트 및/또는 데이터에 의해 포착되는 한 세트의 관측으로부터 시스템, 환경 및/또는 사용자의 상태에 관해 판단하거나 추론하는 프로세스를 말한다. 추론은 특정 상황이나 동작을 식별하는데 이용될 수 있고, 또는 예를 들어 상태들에 대한 확률 분포를 생성할 수 있다. 추론은 확률적일 수 있는데, 즉 데이터 및 이벤트들의 고찰에 기초한 해당 상태들에 대한 확률 분포의 계산일 수 있다. 추론은 또한 한 세트의 이벤트들 및/또는 데이터로부터 상위 레벨 이벤트들을 구성하는데 이용되는 기술들을 말할 수도 있다. 이러한 추론은 한 세트의 관측된 이벤트들 및/또는 저장된 이벤트 데이터로부터의 새로운 이벤트들 또는 동작들, 이벤트들이 시간상 밀접하게 상관되는지 여부, 그리고 이벤트들과 데이터가 하나 또는 여러 이벤트 및 데이터 소스들로부터 나오는지를 추정하게 한다.As used herein, the terms “infer” or “inference” generally refer to the process of determining or reasoning about the state of a system, environment and / or user from a set of observations captured by events and / or data. Speak. Inference can be used to identify a particular situation or action, or can generate a probability distribution over states, for example. Inference can be probabilistic, that is, the calculation of the probability distribution for corresponding states based on consideration of data and events. Inference can also refer to techniques used to construct higher level events from a set of events and / or data. This inference is based on a set of observed events and / or new events or actions from stored event data, whether events are closely correlated in time, and whether events and data come from one or several events and data sources. Let estimate.
더욱이, 본 출원에서 사용된 바와 같이, "컴포넌트", "모듈", "시스템" 등의 용어는 이에 한정되는 것은 아니지만, 하드웨어, 펌웨어, 하드웨어와 소프트웨어의 조합, 소프트웨어 또는 실행중인 소프트웨어와 같은 컴퓨터 관련 엔티티를 포함하는 것이다. 예를 들어, 컴포넌트는 이에 한정되는 것은 아니지만, 프로세서상에서 실행하는 프로세스, 프로세서, 객체, 실행 가능한 실행 스레드, 프로그램 및/또는 컴퓨터일 수도 있다. 예시로, 연산 디바이스 상에서 구동하는 애플리케이션과 연산 디바이스 모두 컴포넌트일 수 있다. 하나 이상의 컴포넌트가 프로세스 및/또는 실행 스레드 내에 상주할 수 있으며, 컴포넌트가 하나의 컴퓨터에 집중될 수도 있고 그리고/또는 2개 이상의 컴퓨터 사이에 분산될 수도 있다. 또한, 이들 컴포넌트는 각종 데이터 구조를 저장한 각종 컴퓨터 판독 가능 매체로부터 실행될 수 있다. 컴포넌트들은 하나 이상의 데이터 패킷(예를 들어, 로컬 시스템, 분산 시스템의 다른 컴포넌트와 그리고/또는 신호에 의해 다른 시스템들과 인터넷과 같은 네트워크를 거쳐 상호 작용하는 어떤 컴포넌트로부터의 데이터)을 갖는 신호에 따르는 등 로컬 및/또는 원격 프로세스에 의해 통신할 수 있다.Moreover, as used in this application, the terms "component", "module", "system", etc. are not limited to this, but are related to a computer, such as hardware, firmware, a combination of hardware and software, software, or running software. It contains entities. For example, a component may be, but is not limited to, a process executing on a processor, a processor, an object, an executable thread of execution, a program, and / or a computer. For example, both an application running on a computing device and a computing device may be components. One or more components can reside within a process and / or thread of execution, and components can be centralized on one computer and / or distributed between two or more computers. In addition, these components can execute from various computer readable media storing various data structures. Components are compliant with signals having one or more data packets (e.g., data from any component that interacts with other components of the local system, distributed system, and / or other systems via signals, such as the Internet). Etc. can communicate by local and / or remote processes.
10: Rode Side Equipment(RSE)
300: CACC 시스템
310: 정보수집부
320: 통신부
330: 제어부
331: 상태관리부
333: 주행관리부
335: 목표차량 선정부10: Rode Side Equipment (RSE)
300: CACC system
310: information collection department
320: communication unit
330: control unit
331: State management department
333: driving management department
335: target vehicle selection unit
Claims (14)
V2V(Vehicle to Vehicle) 통신을 이용하여 주변차량들의 차량 정보를 획득하는 통신부;
자차량에 구비된 센서들을 이용하여 주변 차량의 차량 정보 및 상기 자차량의 차량 정보를 획득하는 정보수집부;
상기 주변차량들의 차량 정보 및 상기 자차량의 차량 정보에 기초하여 상기 자차량이 추종하기 위한 목표차량을 선정하고, 선정된 목표차량의 속도정보를 바탕으로 상기 자차량의 주행 속도를 제어하는 제어부;를 포함하고,
상기 제어부는,
상기 자차량과 동일한 차선에 존재하는 차량들을 포함하는 제 1 잠재적 관심 차량 그룹을 선정하고,
상기 제 1 잠재적 관심 차량 그룹 내의 차량들 중, 상기 V2V 통신 및 상기 센서들을 이용해 상기 자차량으로부터 일정 거리 내에 존재하는 차량들을 제 2 잠재적 관심 차량 그룹으로 선정하고,
상기 제 2 잠재적 관심 차량 그룹 내의 차량들 중, 상기 V2V 통신을 통해 획득되는 차량의 속도와 상기 센서들을 통해 획득되는 차량의 속도 사이의 차이가 기 설정된 값 미만인 차량을 제 3 잠재적 관심 차량 그룹으로 선정하고,
상기 제 3 잠재적 관심 차량 그룹 내의 적어도 하나의 차량을 상기 목표차량으로 선정하는,
협조 적응 순항 제어 시스템.A cooperative adaptive cruise control (CACC) system provided in the own vehicle and controlling the driving speed of the own vehicle,
A communication unit for acquiring vehicle information of surrounding vehicles using vehicle-to-vehicle (V2V) communication;
An information collecting unit for acquiring vehicle information of surrounding vehicles and vehicle information of the own vehicle using sensors provided in the own vehicle;
A control unit for selecting a target vehicle for following the host vehicle based on the vehicle information of the surrounding vehicles and the vehicle information of the host vehicle, and controlling a driving speed of the host vehicle based on the selected vehicle speed information; Including,
The control unit,
Selecting a first potential vehicle group of interest including vehicles present in the same lane as the host vehicle,
Among the vehicles in the first potentially interested vehicle group, vehicles that exist within a certain distance from the host vehicle using the V2V communication and the sensors are selected as the second potentially interested vehicle group,
Among the vehicles in the second potential vehicle group of interest, a vehicle having a difference between a vehicle speed obtained through the V2V communication and a vehicle speed obtained through the sensors is less than a preset value, and is selected as a third potential vehicle group of interest. and,
Selecting at least one vehicle in the third potential vehicle group of interest as the target vehicle,
Cooperative adaptive cruise control system.
스로틀(throttle) 및 브레이크를 제어하는 구동부를 더 포함하고,
상기 제어부는 상기 자차량의 주행 속도를 제어하기 위하여 상기 구동부를 제어하는,
협조 적응 순항 제어 시스템.According to claim 1,
Further comprising a drive for controlling the throttle and brake,
The control unit controls the driving unit to control the driving speed of the host vehicle,
Cooperative adaptive cruise control system.
상기 협조 적응 순항 제어 시스템의 상태 정보를 운전자에게 알려줄 수 있는 DVI부를 더 포함하는,
협조 적응 순항 제어 시스템. According to claim 1,
Further comprising a DVI unit that can inform the driver of the state information of the coordinated adaptive cruise control system,
Cooperative adaptive cruise control system.
협조 적응 순항 제어 시스템의 상태를 관리하는 상태관리부;
상기 주변차량들의 차량 정보 및 상기 자차량의 차량 정보에 기초하여 상기 목표차량을 선정하는 목표차량 선정부; 및
상기 목표차량의 속도정보를 바탕으로 상기 자차량의 주행 속도를 제어하는 주행관리부; 를 포함하는,
협조 적응 순항 제어 시스템.According to claim 1, The control unit,
A state management unit that manages the state of the cooperative adaptive cruise control system;
A target vehicle selecting unit selecting the target vehicle based on vehicle information of the surrounding vehicles and vehicle information of the own vehicle; And
A driving management unit that controls the driving speed of the host vehicle based on the speed information of the target vehicle; Containing,
Cooperative adaptive cruise control system.
상기 상태관리부는 협조 적응 순항 제어 시스템이 동작하지 않는 오프(OFF)상태, 동작은 하지만 상기 자차량의 주행 속도를 제어하지 않는 대기상태, V2V 통신으로 연결되어 있는 관심영역 내 차량이 없어 상기 자차량에서 획득한 정보만을 이용하여 상기 자차량의 주행 속도를 제어하는 ACC 활성상태, 및 V2V 통신으로 연결되어 있는 관심영역 내의 주변차량이 있어, 상기 V2V 통신을 통해 획득한 주변차량으로부터의 정보 및 상기 자차량에서 획득한 정보를 이용하여 상기 자차량의 주행 속도를 제어하는 협조 활성상태 중의 하나로 상기 협조 적응 순항 제어 시스템의 상태를 표시하는,
협조 적응 순항 제어 시스템.According to claim 4,
The state management unit is in an off state in which the coordinated adaptive cruise control system is not operated, a standby state in which operation is performed but does not control the driving speed of the host vehicle, and there is no vehicle in the region of interest connected by V2V communication. There is an ACC active state that controls the driving speed of the host vehicle using only the information obtained from and a surrounding vehicle in a region of interest connected by V2V communication, and information from the surrounding vehicle acquired through the V2V communication Displaying the state of the cooperative adaptive cruise control system as one of the cooperative active states for controlling the traveling speed of the host vehicle using information obtained from the vehicle,
Cooperative adaptive cruise control system.
상기 정보수집부는 전방 물체를 감지하는 거리센서를 포함하고,
상기 목표차량 선정부는 상기 거리센서의 감지 결과를 기초로 상기 자차량의 주행 차로와 동일한 차로를 주행하는 차량의 존재를 결정하는,
협조 적응 순항 제어 시스템. According to claim 4,
The information collecting unit includes a distance sensor for detecting an object in front,
The target vehicle selection unit determines the presence of a vehicle driving on the same lane as the driving lane of the host vehicle based on the detection result of the distance sensor,
Cooperative adaptive cruise control system.
상기 목표차량 선정부는 상기 거리센서의 감지 결과에 따라, 미리 정해진 제1 기준 폭 이상의 폭을 가지는 상기 자차량의 주행 차로 상의 물체를 상기 자차량의 선행 차량으로 결정하는,
협조 적응 순항 제어 시스템. The method of claim 6,
The target vehicle selection unit determines an object on the driving lane of the own vehicle having a width equal to or greater than a first predetermined reference width as a preceding vehicle of the own vehicle, according to the detection result of the distance sensor,
Cooperative adaptive cruise control system.
상기 거리센서는 라이다(Lidar)를 포함하는,
협조 적응 순항 제어 시스템. The method of claim 6,
The distance sensor includes a lidar,
Cooperative adaptive cruise control system.
상기 정보수집부는 전방 영상을 획득하는 카메라를 더 포함하고,
상기 목표차량 선정부는 상기 카메라에 의해 획득된 전방 영상으로부터 상기 자차량이 주행 중인 차로의 정보를 획득하는,
협조 적응 순항 제어 시스템.The method of claim 6,
The information collecting unit further includes a camera that acquires a front image,
The target vehicle selection unit acquires information of a lane in which the host vehicle is running from a front image obtained by the camera,
Cooperative adaptive cruise control system.
V2V 통신을 이용하여 주변차량의 차량 정보를 획득하는 단계;
자차량의 센서를 이용하여 주변 차량의 차량 정보 및 상기 자차량의 차량 정보를 획득하는 단계;
상기 주변차량의 차량 정보와 상기 자차량의 차량 정보에 기초하여 상기 자차량이 추종하기 위한 목표차량을 선정하는 단계;;
상기 목표차량의 주행 정보를 이용하여 상기 자차량의 주행 속도를 결정하는 단계; 및
결정된 상기 주행 속도에 따라 상기 자차량을 제어하는 단계;를 포함하고,
상기 목표차량을 결정하는 단계는:
상기 자차량과 동일한 차선에 존재하는 차량들을 포함하는 제 1 잠재적 관심 차량 그룹을 선정하는 단계;
상기 제 1 잠재적 관심 차량 그룹 내의 차량들 중, 상기 V2V 통신 및 자차량의 센서를 이용해 일정 거리 내에 존재하는 차량들을 제 2 잠재적 관심 차량 그룹으로 선정하는 단계;
상기 제 2 잠재적 관심 차량 그룹 내의 차량들 중, 상기 V2V 통신을 통해 획득되는 차량의 속도와 상기 센서를 통해 획득된 차량의 속도 사이의 차이가 기설정된 값 미만인 차량을 제 3 잠재적 관심 차량 그룹으로 선정하는 단계; 및
상기 제 3 잠재적 관심 차량 그룹 내의 적어도 하나의 차량을 상기 목표차량으로 선정하는 단계;를 포함하는,
CACC 시스템의 속도 제어방법.As a speed control method of a cooperative adaptive cruise control (CACC) system provided in the own vehicle and controlling the driving speed of the own vehicle,
Obtaining vehicle information of a surrounding vehicle using V2V communication;
Obtaining vehicle information of a surrounding vehicle and vehicle information of the own vehicle using a sensor of the own vehicle;
Selecting a target vehicle for following the own vehicle based on the vehicle information of the surrounding vehicle and the vehicle information of the own vehicle;
Determining a driving speed of the host vehicle using the driving information of the target vehicle; And
And controlling the own vehicle according to the determined driving speed.
The step of determining the target vehicle is:
Selecting a first potential vehicle group of interest including vehicles present in the same lane as the host vehicle;
Selecting, among the vehicles in the first potential interest vehicle group, vehicles that exist within a certain distance using the V2V communication and a sensor of the own vehicle as a second potential interest vehicle group;
Among the vehicles in the second potential vehicle group of interest, a vehicle having a difference between a vehicle speed obtained through the V2V communication and a vehicle speed obtained through the sensor is less than a preset value, and is selected as a third potential vehicle group of interest. To do; And
And selecting at least one vehicle in the third potential vehicle group of interest as the target vehicle.
CACC system speed control method.
전방 물체를 감지하는 단계; 및
상기 감지 결과를 기초로 상기 자차량의 주행 차로와 동일한 차로로 주행하는 선행차량을 결정하는 단계를 더 포함하는,
CACC 시스템의 속도 제어방법. The method of claim 10,
Detecting an object ahead; And
Further comprising the step of determining the preceding vehicle driving in the same lane as the driving lane of the host vehicle based on the detection result,
CACC system speed control method.
상기 선행차량을 결정하는 단계는,
상기 전방 물체를 감지하는 단계의 감지결과에 따라, 미리 정해진 제1 기준 폭 이상의 폭을 가지는 상기 자차량의 주행 차로 상의 물체를 상기 선행차량으로 결정하는,
CACC 시스템의 속도 제어방법. The method of claim 11,
Determining the preceding vehicle,
According to the detection result of the step of detecting the front object, the object on the driving lane of the host vehicle having a width greater than or equal to a predetermined first reference width is determined as the preceding vehicle,
CACC system speed control method.
상기 전방 물체와의 거리를 감지하는 단계는,
라이다(Lidar)를 이용하여 상기 전방 물체와의 거리를 감지하는 단계를 포함하는,
CACC 시스템의 속도 제어방법. The method of claim 11,
The step of sensing the distance from the front object,
Comprising the step of detecting the distance to the front object using a lidar (Lidar),
CACC system speed control method.
전방 영상을 획득하는 단계; 및
상기 전방 영상으로부터 상기 자차량의 주행 차로를 결정하는 단계;를 더 포함하는,
CACC 시스템의 속도 제어방법.The method of claim 11,
Obtaining a front image; And
Further comprising the step of determining the driving lane of the host vehicle from the front image;
CACC system speed control method.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200051571A KR102373334B1 (en) | 2016-12-30 | 2020-04-28 | Apparatus and method for controlling speed in cacc system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160184294A KR102107726B1 (en) | 2016-12-30 | 2016-12-30 | Apparatus and method for controlling speed in cacc system |
| KR1020200051571A KR102373334B1 (en) | 2016-12-30 | 2020-04-28 | Apparatus and method for controlling speed in cacc system |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160184294A Division KR102107726B1 (en) | 2015-10-15 | 2016-12-30 | Apparatus and method for controlling speed in cacc system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200047501A true KR20200047501A (en) | 2020-05-07 |
| KR102373334B1 KR102373334B1 (en) | 2022-03-11 |
Family
ID=80814288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200051571A Active KR102373334B1 (en) | 2016-12-30 | 2020-04-28 | Apparatus and method for controlling speed in cacc system |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102373334B1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115771512A (en) * | 2022-12-09 | 2023-03-10 | 浙江零跑科技股份有限公司 | Target selection method and device, computer equipment, readable storage medium and motor vehicle |
| KR102691520B1 (en) * | 2021-12-07 | 2024-08-05 | 대한민국 | Electronic device capable of lidar-based fruit tree recognition and operator tracking, autonomous driving agricultural machinery including the same, and autonomous driving control method therefor |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000057500A (en) * | 1998-08-05 | 2000-02-25 | Mitsubishi Motors Corp | Vehicle running control method |
| JP2005231490A (en) * | 2004-02-19 | 2005-09-02 | Honda Motor Co Ltd | Follow-up control device |
| JP2009280014A (en) * | 2008-05-20 | 2009-12-03 | Toyota Motor Corp | Inter-vehicle distance controller |
| JP4600174B2 (en) * | 2005-06-22 | 2010-12-15 | 日産自動車株式会社 | Driving support device and driving support method |
| JP2011173459A (en) * | 2010-02-23 | 2011-09-08 | Toyota Motor Corp | Vehicle control device |
| KR20150056000A (en) * | 2013-11-14 | 2015-05-22 | 주식회사 만도 | Adaptive cruise control apparatus of vehicle with sensing distance regulation function and method for thereof |
-
2020
- 2020-04-28 KR KR1020200051571A patent/KR102373334B1/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000057500A (en) * | 1998-08-05 | 2000-02-25 | Mitsubishi Motors Corp | Vehicle running control method |
| JP2005231490A (en) * | 2004-02-19 | 2005-09-02 | Honda Motor Co Ltd | Follow-up control device |
| JP4600174B2 (en) * | 2005-06-22 | 2010-12-15 | 日産自動車株式会社 | Driving support device and driving support method |
| JP2009280014A (en) * | 2008-05-20 | 2009-12-03 | Toyota Motor Corp | Inter-vehicle distance controller |
| JP2011173459A (en) * | 2010-02-23 | 2011-09-08 | Toyota Motor Corp | Vehicle control device |
| KR20150056000A (en) * | 2013-11-14 | 2015-05-22 | 주식회사 만도 | Adaptive cruise control apparatus of vehicle with sensing distance regulation function and method for thereof |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102691520B1 (en) * | 2021-12-07 | 2024-08-05 | 대한민국 | Electronic device capable of lidar-based fruit tree recognition and operator tracking, autonomous driving agricultural machinery including the same, and autonomous driving control method therefor |
| CN115771512A (en) * | 2022-12-09 | 2023-03-10 | 浙江零跑科技股份有限公司 | Target selection method and device, computer equipment, readable storage medium and motor vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102373334B1 (en) | 2022-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102107726B1 (en) | Apparatus and method for controlling speed in cacc system | |
| KR102107774B1 (en) | Cooperative Adaptive Cruise Control based on Driving Pattern of Target Vehicle | |
| US11590976B2 (en) | Apparatus and method for controlling speed in cooperative adaptive cruise control system | |
| US11772652B2 (en) | Cooperative adaptive cruise control system based on driving pattern of target vehicle | |
| CN111267854B (en) | Systems and methods for supporting autonomous vehicles | |
| KR102792003B1 (en) | Autonomous driving apparatus and method | |
| US11498577B2 (en) | Behavior prediction device | |
| CN108275143B (en) | Automatic parking system and automatic parking method | |
| US9896094B2 (en) | Collision avoidance control system and control method | |
| US9714034B2 (en) | Vehicle control device | |
| KR102107762B1 (en) | Control apparatus and method for improving fuel efficiency in cacc system | |
| CN112208533B (en) | Vehicle control system, vehicle control method and storage medium | |
| WO2019242768A1 (en) | Tailgating alert system in vehicles | |
| JP6323385B2 (en) | Vehicle travel control device | |
| CN111629944A (en) | Vehicle control device, vehicle, and vehicle control method | |
| US20200369296A1 (en) | Autonomous driving apparatus and method | |
| CN113525358A (en) | Vehicle control device and vehicle control method | |
| US20200327809A1 (en) | Vehicle and method for predicating collision | |
| KR102373334B1 (en) | Apparatus and method for controlling speed in cacc system | |
| US20200118424A1 (en) | Map information system | |
| KR20230111782A (en) | Vehicle for autonomous driving and method thereof | |
| US20230182722A1 (en) | Collision avoidance method and apparatus | |
| US20240308537A1 (en) | Vehicle control device and vehicle control method | |
| JP2010272088A (en) | Driving support device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
Comment text: Divisional Application of Patent Patent event date: 20200428 Patent event code: PA01071R01D Filing date: 20161230 Application number text: 1020160184294 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20211206 Comment text: Request for Examination of Application Patent event code: PA02011R04I Patent event date: 20200428 Comment text: Divisional Application of Patent |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20220217 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20220307 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20220308 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |