KR20200047501A - 협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 - Google Patents
협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 Download PDFInfo
- Publication number
- KR20200047501A KR20200047501A KR1020200051571A KR20200051571A KR20200047501A KR 20200047501 A KR20200047501 A KR 20200047501A KR 1020200051571 A KR1020200051571 A KR 1020200051571A KR 20200051571 A KR20200051571 A KR 20200051571A KR 20200047501 A KR20200047501 A KR 20200047501A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- information
- driving
- speed
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/072—Curvature of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B60W2420/52—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4042—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/65—Data transmitted between vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0605—Throttle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
본 발명은 제1 목표차량 및 제2 목표차량의 주행정보를 이용하여 자차량의 주행 속도를 결정함으로써 운전자에게 안전한 주행 환경을 제공할 수 있다.
Description
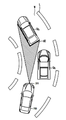
도 2는 직선 도로상에서 CACC 시스템(300)의 관심영역(Region of Interest; ROI)을 도시한 도면이다.
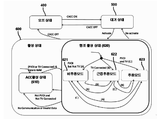
도 3은 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 블록도이다.
도 4는 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 상태천이도를 나타낸 도면이다.
도 5는 본 발명의 일 실시 예에 따른 CACC 시스템(300)의 주행 속도 제어 과정을 설명하기 위한 도면이다.
도 6a 및 도 6b는 선행차량(Cp1)의 위치에 따른 선행차량(Cp1) 및 선선행차량(Cp2)의 감지 결과를 설명하기 위한 도면이다.
도 7은 선행차량(Cp1)이 우측으로 차로 변경 중인 경우를 예시한 도면이다.
도 8은 곡선 주행 차로에 대하여 선행차량의 위치에 따른 선행차량 및 선선행차량의 감지 결과를 설명하기 위한 도면이다.
도 9는 본 발명의 일 실시예에 따른 CACC 시스템(300)에서 자차량의 주행 속도를 제어하는 흐름도이다.
도 10은 본 발명의 일 실시예에 따른 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다.
도 11는 본 발명의 일 실시 예에 따른 직선 주행 차로에 대하여 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다.
도 12는 본 발명의 일 실시 예에 따른 곡선 주행 차로에 대하여 CACC 시스템(300)에서 자차량의 센서를 이용하여 선행차량 및 선선행차량을 결정하는 흐름도이다.

| 목표차량존재 | 목표차량연결 | PVOI존재 | CACC 모드 | 최소 타임갭 |
Maximum Deceleration |
Maximum Acceleration |
V2V통신으로 받은 데이터 사용여부 |
| no | no | no | ACC 활성상태: 속도제어모드 | 0.8 s | 3.5 m/s^2 | 2.0 m/s^2 | 사용 안함 |
| yes | no | no | ACC 활성상태: 추종모드 | 0.8 s | 3.5 m/s^2 | 2.0 m/s^2 | 사용 안함 |
| no | no | yes | 협조 활성상태: 비추종모드 |
0.8 s | 3.5 m/s^2 | 2.0 m/s^2 | 사용 |
| yes | yes | no | 협조 활성상태: 근접추종모드 |
0.5 s | 5 m/s^2 | 2.75 m/s^2 | 사용 |
| yes | yes | yes | 협조 활성상태: 근접추종모드 |
0.5 s | 5 m/s^2 | 2.75 m/s^2 | 사용 |
| yes | no | yes | 협조 활성상태: 추종모드 |
0.8 s | 3.5 m/s^2 | 2.0 m/s^2 | 사용 |
300: CACC 시스템
310: 정보수집부
320: 통신부
330: 제어부
331: 상태관리부
333: 주행관리부
335: 목표차량 선정부
Claims (14)
- 자차량에 구비되고 자차량의 주행 속도를 제어하는 협조 적응 순항 제어(Cooperative Adaptive Cruise Control; 이하 CACC) 시스템으로서,
V2V(Vehicle to Vehicle) 통신을 이용하여 주변차량들의 차량 정보를 획득하는 통신부;
자차량에 구비된 센서들을 이용하여 주변 차량의 차량 정보 및 상기 자차량의 차량 정보를 획득하는 정보수집부;
상기 주변차량들의 차량 정보 및 상기 자차량의 차량 정보에 기초하여 상기 자차량이 추종하기 위한 목표차량을 선정하고, 선정된 목표차량의 속도정보를 바탕으로 상기 자차량의 주행 속도를 제어하는 제어부;를 포함하고,
상기 제어부는,
상기 자차량과 동일한 차선에 존재하는 차량들을 포함하는 제 1 잠재적 관심 차량 그룹을 선정하고,
상기 제 1 잠재적 관심 차량 그룹 내의 차량들 중, 상기 V2V 통신 및 상기 센서들을 이용해 상기 자차량으로부터 일정 거리 내에 존재하는 차량들을 제 2 잠재적 관심 차량 그룹으로 선정하고,
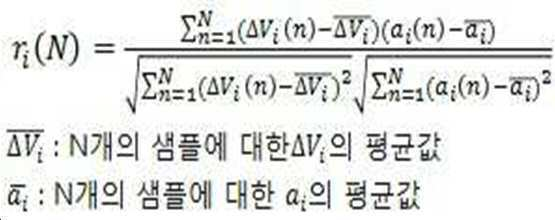
상기 제 2 잠재적 관심 차량 그룹 내의 차량들 중, 상기 V2V 통신을 통해 획득되는 차량의 속도와 상기 센서들을 통해 획득되는 차량의 속도 사이의 차이가 기 설정된 값 미만인 차량을 제 3 잠재적 관심 차량 그룹으로 선정하고,
상기 제 3 잠재적 관심 차량 그룹 내의 적어도 하나의 차량을 상기 목표차량으로 선정하는,
협조 적응 순항 제어 시스템. - 제1항에 있어서,
스로틀(throttle) 및 브레이크를 제어하는 구동부를 더 포함하고,
상기 제어부는 상기 자차량의 주행 속도를 제어하기 위하여 상기 구동부를 제어하는,
협조 적응 순항 제어 시스템. - 제1항에 있어서,
상기 협조 적응 순항 제어 시스템의 상태 정보를 운전자에게 알려줄 수 있는 DVI부를 더 포함하는,
협조 적응 순항 제어 시스템. - 제1항에 있어서, 상기 제어부는,
협조 적응 순항 제어 시스템의 상태를 관리하는 상태관리부;
상기 주변차량들의 차량 정보 및 상기 자차량의 차량 정보에 기초하여 상기 목표차량을 선정하는 목표차량 선정부; 및
상기 목표차량의 속도정보를 바탕으로 상기 자차량의 주행 속도를 제어하는 주행관리부; 를 포함하는,
협조 적응 순항 제어 시스템. - 제4항에 있어서,
상기 상태관리부는 협조 적응 순항 제어 시스템이 동작하지 않는 오프(OFF)상태, 동작은 하지만 상기 자차량의 주행 속도를 제어하지 않는 대기상태, V2V 통신으로 연결되어 있는 관심영역 내 차량이 없어 상기 자차량에서 획득한 정보만을 이용하여 상기 자차량의 주행 속도를 제어하는 ACC 활성상태, 및 V2V 통신으로 연결되어 있는 관심영역 내의 주변차량이 있어, 상기 V2V 통신을 통해 획득한 주변차량으로부터의 정보 및 상기 자차량에서 획득한 정보를 이용하여 상기 자차량의 주행 속도를 제어하는 협조 활성상태 중의 하나로 상기 협조 적응 순항 제어 시스템의 상태를 표시하는,
협조 적응 순항 제어 시스템. - 제4항에 있어서,
상기 정보수집부는 전방 물체를 감지하는 거리센서를 포함하고,
상기 목표차량 선정부는 상기 거리센서의 감지 결과를 기초로 상기 자차량의 주행 차로와 동일한 차로를 주행하는 차량의 존재를 결정하는,
협조 적응 순항 제어 시스템. - 제6항에 있어서,
상기 목표차량 선정부는 상기 거리센서의 감지 결과에 따라, 미리 정해진 제1 기준 폭 이상의 폭을 가지는 상기 자차량의 주행 차로 상의 물체를 상기 자차량의 선행 차량으로 결정하는,
협조 적응 순항 제어 시스템. - 제6항에 있어서,
상기 거리센서는 라이다(Lidar)를 포함하는,
협조 적응 순항 제어 시스템. - 제6항에 있어서,
상기 정보수집부는 전방 영상을 획득하는 카메라를 더 포함하고,
상기 목표차량 선정부는 상기 카메라에 의해 획득된 전방 영상으로부터 상기 자차량이 주행 중인 차로의 정보를 획득하는,
협조 적응 순항 제어 시스템. - 자차량에 구비되고 자차량의 주행 속도를 제어하는 협조 적응 순항 제어(Cooperative Adaptive Cruise Control; 이하 CACC) 시스템의 속도 제어방법으로서,
V2V 통신을 이용하여 주변차량의 차량 정보를 획득하는 단계;
자차량의 센서를 이용하여 주변 차량의 차량 정보 및 상기 자차량의 차량 정보를 획득하는 단계;
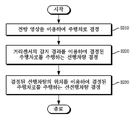
상기 주변차량의 차량 정보와 상기 자차량의 차량 정보에 기초하여 상기 자차량이 추종하기 위한 목표차량을 선정하는 단계;;
상기 목표차량의 주행 정보를 이용하여 상기 자차량의 주행 속도를 결정하는 단계; 및
결정된 상기 주행 속도에 따라 상기 자차량을 제어하는 단계;를 포함하고,
상기 목표차량을 결정하는 단계는:
상기 자차량과 동일한 차선에 존재하는 차량들을 포함하는 제 1 잠재적 관심 차량 그룹을 선정하는 단계;
상기 제 1 잠재적 관심 차량 그룹 내의 차량들 중, 상기 V2V 통신 및 자차량의 센서를 이용해 일정 거리 내에 존재하는 차량들을 제 2 잠재적 관심 차량 그룹으로 선정하는 단계;
상기 제 2 잠재적 관심 차량 그룹 내의 차량들 중, 상기 V2V 통신을 통해 획득되는 차량의 속도와 상기 센서를 통해 획득된 차량의 속도 사이의 차이가 기설정된 값 미만인 차량을 제 3 잠재적 관심 차량 그룹으로 선정하는 단계; 및
상기 제 3 잠재적 관심 차량 그룹 내의 적어도 하나의 차량을 상기 목표차량으로 선정하는 단계;를 포함하는,
CACC 시스템의 속도 제어방법. - 제10항에 있어서,
전방 물체를 감지하는 단계; 및
상기 감지 결과를 기초로 상기 자차량의 주행 차로와 동일한 차로로 주행하는 선행차량을 결정하는 단계를 더 포함하는,
CACC 시스템의 속도 제어방법. - 제11항에 있어서,
상기 선행차량을 결정하는 단계는,
상기 전방 물체를 감지하는 단계의 감지결과에 따라, 미리 정해진 제1 기준 폭 이상의 폭을 가지는 상기 자차량의 주행 차로 상의 물체를 상기 선행차량으로 결정하는,
CACC 시스템의 속도 제어방법. - 제11항에 있어서,
상기 전방 물체와의 거리를 감지하는 단계는,
라이다(Lidar)를 이용하여 상기 전방 물체와의 거리를 감지하는 단계를 포함하는,
CACC 시스템의 속도 제어방법. - 제11항에 있어서,
전방 영상을 획득하는 단계; 및
상기 전방 영상으로부터 상기 자차량의 주행 차로를 결정하는 단계;를 더 포함하는,
CACC 시스템의 속도 제어방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200051571A KR102373334B1 (ko) | 2016-12-30 | 2020-04-28 | 협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160184294A KR102107726B1 (ko) | 2016-12-30 | 2016-12-30 | 협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 |
| KR1020200051571A KR102373334B1 (ko) | 2016-12-30 | 2020-04-28 | 협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160184294A Division KR102107726B1 (ko) | 2015-10-15 | 2016-12-30 | 협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200047501A true KR20200047501A (ko) | 2020-05-07 |
| KR102373334B1 KR102373334B1 (ko) | 2022-03-11 |
Family
ID=80814288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200051571A Active KR102373334B1 (ko) | 2016-12-30 | 2020-04-28 | 협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102373334B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115771512A (zh) * | 2022-12-09 | 2023-03-10 | 浙江零跑科技股份有限公司 | 一种目标选择方法、装置、计算机设备、可读存储介质及机动车 |
| KR102691520B1 (ko) * | 2021-12-07 | 2024-08-05 | 대한민국 | LiDAR 기반 과수 인식 및 작업자 추종이 가능한 전자 장치, 이를 포함하는 자율 주행 농기계 및 자율 주행 제어 방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000057500A (ja) * | 1998-08-05 | 2000-02-25 | Mitsubishi Motors Corp | 車両の走行制御方法 |
| JP2005231490A (ja) * | 2004-02-19 | 2005-09-02 | Honda Motor Co Ltd | 追従走行制御装置 |
| JP2009280014A (ja) * | 2008-05-20 | 2009-12-03 | Toyota Motor Corp | 車間距離制御装置 |
| JP4600174B2 (ja) * | 2005-06-22 | 2010-12-15 | 日産自動車株式会社 | 走行支援装置及び走行支援方法 |
| JP2011173459A (ja) * | 2010-02-23 | 2011-09-08 | Toyota Motor Corp | 車両制御装置 |
| KR20150056000A (ko) * | 2013-11-14 | 2015-05-22 | 주식회사 만도 | 감지 거리 조정 기능을 갖는 적응 순항 제어 장치 및 그의 제어 방법 |
-
2020
- 2020-04-28 KR KR1020200051571A patent/KR102373334B1/ko active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000057500A (ja) * | 1998-08-05 | 2000-02-25 | Mitsubishi Motors Corp | 車両の走行制御方法 |
| JP2005231490A (ja) * | 2004-02-19 | 2005-09-02 | Honda Motor Co Ltd | 追従走行制御装置 |
| JP4600174B2 (ja) * | 2005-06-22 | 2010-12-15 | 日産自動車株式会社 | 走行支援装置及び走行支援方法 |
| JP2009280014A (ja) * | 2008-05-20 | 2009-12-03 | Toyota Motor Corp | 車間距離制御装置 |
| JP2011173459A (ja) * | 2010-02-23 | 2011-09-08 | Toyota Motor Corp | 車両制御装置 |
| KR20150056000A (ko) * | 2013-11-14 | 2015-05-22 | 주식회사 만도 | 감지 거리 조정 기능을 갖는 적응 순항 제어 장치 및 그의 제어 방법 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102691520B1 (ko) * | 2021-12-07 | 2024-08-05 | 대한민국 | LiDAR 기반 과수 인식 및 작업자 추종이 가능한 전자 장치, 이를 포함하는 자율 주행 농기계 및 자율 주행 제어 방법 |
| CN115771512A (zh) * | 2022-12-09 | 2023-03-10 | 浙江零跑科技股份有限公司 | 一种目标选择方法、装置、计算机设备、可读存储介质及机动车 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102373334B1 (ko) | 2022-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102107726B1 (ko) | 협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 | |
| KR102107774B1 (ko) | 목표차량의 운전패턴에 따른 협조 적응 순항 제어 시스템 | |
| US11590976B2 (en) | Apparatus and method for controlling speed in cooperative adaptive cruise control system | |
| US11772652B2 (en) | Cooperative adaptive cruise control system based on driving pattern of target vehicle | |
| CN111267854B (zh) | 用于支持自动驾驶车辆的系统和方法 | |
| KR102792003B1 (ko) | 자율 주행 장치 및 방법 | |
| US11498577B2 (en) | Behavior prediction device | |
| CN108275143B (zh) | 自动泊车系统和自动泊车方法 | |
| US9896094B2 (en) | Collision avoidance control system and control method | |
| US9714034B2 (en) | Vehicle control device | |
| KR102107762B1 (ko) | 협조 적응 순항 제어 시스템의 연비 향상 제어 장치 및 방법 | |
| CN112208533B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| WO2019242768A1 (en) | Tailgating alert system in vehicles | |
| JP6323385B2 (ja) | 車両走行制御装置 | |
| CN111629944A (zh) | 车辆控制装置、车辆以及车辆控制方法 | |
| US20200369296A1 (en) | Autonomous driving apparatus and method | |
| CN113525358A (zh) | 车辆控制装置以及车辆控制方法 | |
| US20200327809A1 (en) | Vehicle and method for predicating collision | |
| KR102373334B1 (ko) | 협조 적응형 순항 제어 시스템의 속도 제어 장치 및 방법 | |
| US20200118424A1 (en) | Map information system | |
| KR20230111782A (ko) | 자율 주행으로 동작하는 차량 및 그 제어 방법 | |
| US20230182722A1 (en) | Collision avoidance method and apparatus | |
| US20240308537A1 (en) | Vehicle control device and vehicle control method | |
| JP2010272088A (ja) | 走行支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
Comment text: Divisional Application of Patent Patent event date: 20200428 Patent event code: PA01071R01D Filing date: 20161230 Application number text: 1020160184294 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20211206 Comment text: Request for Examination of Application Patent event code: PA02011R04I Patent event date: 20200428 Comment text: Divisional Application of Patent |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20220217 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20220307 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20220308 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |