KR20200057057A - 전기 수직 이착륙 (vtol) 항공기용 윙 틸트 구동 시스템 - Google Patents
전기 수직 이착륙 (vtol) 항공기용 윙 틸트 구동 시스템 Download PDFInfo
- Publication number
- KR20200057057A KR20200057057A KR1020207011614A KR20207011614A KR20200057057A KR 20200057057 A KR20200057057 A KR 20200057057A KR 1020207011614 A KR1020207011614 A KR 1020207011614A KR 20207011614 A KR20207011614 A KR 20207011614A KR 20200057057 A KR20200057057 A KR 20200057057A
- Authority
- KR
- South Korea
- Prior art keywords
- aircraft
- motor
- vtol
- landing
- control surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/22—Compound rotorcraft, i.e. aircraft using in flight the features of both aeroplane and rotorcraft
- B64C27/28—Compound rotorcraft, i.e. aircraft using in flight the features of both aeroplane and rotorcraft with forward-propulsion propellers pivotable to act as lifting rotors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C29/00—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft
- B64C29/0008—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded
- B64C29/0016—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers
- B64C29/0033—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft having its flight directional axis horizontal when grounded the lift during taking-off being created by free or ducted propellers or by blowers the propellers being tiltable relative to the fuselage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
- B64C9/14—Adjustable control surfaces or members, e.g. rudders forming slots
- B64C9/16—Adjustable control surfaces or members, e.g. rudders forming slots at the rear of the wing
- B64C9/18—Adjustable control surfaces or members, e.g. rudders forming slots at the rear of the wing by single flaps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C1/00—Fuselages; Constructional features common to fuselages, wings, stabilising surfaces or the like
- B64C1/14—Windows; Doors; Hatch covers or access panels; Surrounding frame structures; Canopies; Windscreens accessories therefor, e.g. pressure sensors, water deflectors, hinges, seals, handles, latches, windscreen wipers
- B64C1/1407—Doors; surrounding frames
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C11/00—Propellers, e.g. of ducted type; Features common to propellers and rotors for rotorcraft
- B64C11/30—Blade pitch-changing mechanisms
- B64C11/305—Blade pitch-changing mechanisms characterised by being influenced by other control systems, e.g. fuel supply
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C15/00—Attitude, flight direction, or altitude control by jet reaction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C23/00—Influencing air flow over aircraft surfaces, not otherwise provided for
- B64C23/06—Influencing air flow over aircraft surfaces, not otherwise provided for by generating vortices
- B64C23/065—Influencing air flow over aircraft surfaces, not otherwise provided for by generating vortices at the wing tips
- B64C23/069—Influencing air flow over aircraft surfaces, not otherwise provided for by generating vortices at the wing tips using one or more wing tip airfoil devices, e.g. winglets, splines, wing tip fences or raked wingtips
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/52—Tilting of rotor bodily relative to fuselage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/54—Mechanisms for controlling blade adjustment or movement relative to rotor head, e.g. lag-lead movement
- B64C27/80—Mechanisms for controlling blade adjustment or movement relative to rotor head, e.g. lag-lead movement for differential adjustment of blade pitch between two or more lifting rotors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/82—Rotorcraft; Rotors peculiar thereto characterised by the provision of an auxiliary rotor or fluid-jet device for counter-balancing lifting rotor torque or changing direction of rotorcraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C29/00—Aircraft capable of landing or taking-off vertically, e.g. vertical take-off and landing [VTOL] aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C3/00—Wings
- B64C3/38—Adjustment of complete wings or parts thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/06—Aircraft not otherwise provided for having disc- or ring-shaped wings
- B64C39/068—Aircraft not otherwise provided for having disc- or ring-shaped wings having multiple wings joined at the tips
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C9/00—Adjustable control surfaces or members, e.g. rudders
- B64C9/14—Adjustable control surfaces or members, e.g. rudders forming slots
- B64C9/16—Adjustable control surfaces or members, e.g. rudders forming slots at the rear of the wing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
- B64D27/24—Aircraft characterised by the type or position of power plants using steam or spring force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
- B64D27/30—Aircraft characterised by electric power plants
- B64D27/31—Aircraft characterised by electric power plants within, or attached to, wings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/02—Aircraft characterised by the type or position of power plants
- B64D27/30—Aircraft characterised by electric power plants
- B64D27/34—All-electric aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/40—Arrangements for mounting power plants in aircraft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D27/00—Arrangement or mounting of power plants in aircraft; Aircraft characterised by the type or position of power plants
- B64D27/40—Arrangements for mounting power plants in aircraft
- B64D27/402—Arrangements for mounting power plants in aircraft comprising box like supporting frames, e.g. pylons or arrangements for embracing the power plant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D31/00—Power plant control systems; Arrangement of power plant control systems in aircraft
- B64D31/16—Power plant control systems; Arrangement of power plant control systems in aircraft for electric power plants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D35/00—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions
- B64D35/02—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants
- B64D35/021—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants for electric power plants
- B64D35/026—Transmitting power from power plants to propellers or rotors; Arrangements of transmissions specially adapted for specific power plants for electric power plants the electric power plant being integral with the propeller or rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/10—Air crafts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/82—Rotorcraft; Rotors peculiar thereto characterised by the provision of an auxiliary rotor or fluid-jet device for counter-balancing lifting rotor torque or changing direction of rotorcraft
- B64C2027/8227—Rotorcraft; Rotors peculiar thereto characterised by the provision of an auxiliary rotor or fluid-jet device for counter-balancing lifting rotor torque or changing direction of rotorcraft comprising more than one rotor
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/10—Drag reduction
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/40—Weight reduction
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T50/00—Aeronautics or air transport
- Y02T50/60—Efficient propulsion technologies, e.g. for aircraft
-
- Y02T50/62—
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Toys (AREA)
- Transmission Devices (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Chairs For Special Purposes, Such As Reclining Chairs (AREA)
- Fluid-Pressure Circuits (AREA)
Abstract
Description
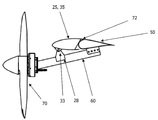
도 1은 본 발명의 수직 이착륙 (VTOL) 항공기를 이착륙 구성으로 도시한 개략도이다.
도 2는 도 1의 수직 이착륙 (VTOL) 항공기를 제2의 전진 비행 구성으로 도시한 개략도이다.
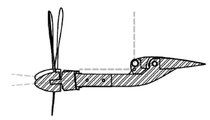
도 3은 수직(이착륙) 로터 위치에서 도 1 및 도 2의 항공기의 날개에 전기 모터를 장착하기 위한 장착 배열을 도시한 개략도이다.
도 4는 로터가 부분적으로 기울어진 위치에 있는 도 3의 배열의 추가적인 개략도이다.
도 5는 로터가 더욱 기울어진 위치에 있는 도 3의 배열의 개략도이다.
도 6은 로터가 수평(전방 비행) 위치에 있는 도 3의 배열의 개략도이다.
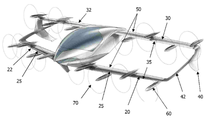
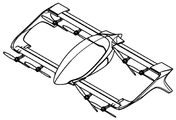
도 7은 VTOL 항공기의 추가적인 실시 예를 도시한 사시도이다.
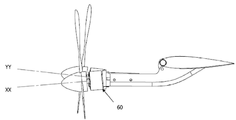
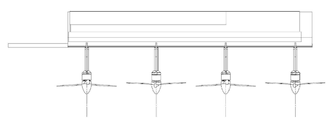
도 8은 도 7의 날개 배열에 대한 측면도이다.
도 9는 도 7의 날개 배열에 대한 평면도이다.
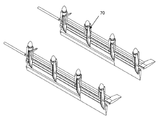
도 10은 로터 블레이드가 접혀진 도 7의 날개 배열에 대한 사시도이다.
도 11A는 로터가 수평(전방 비행) 위치에 있는 도 7 내지 도 10 중 어느 하나의 항공기의 날개에 전기 모터를 장착하기 위한 장착 배열을 도시한 개략적인 측면도이다.
도 11B는 도 11A의 장착 배열에 대한 사시도이다.
도 11C는 로터가 수직(이착륙) 위치에 있는 도 7 내지 도 10 중 어느 하나의 항공기의 날개에 전기 모터를 장착하기 위한 장착 배열을 도시한 개략적인 측면도이다.
도 11D는 도 11C의 장착 배열에 대한 사시도이다.
도 12A 내지 도 12D는 도 7 내지 도 11 중 어느 하나의 항공기의 날개 배열을 위한 수직 및 수평 간의 전환을 도시한 개략적인 단면도이다.
도 13은 제1 및 제2 실시 예 중 어느 하나의 전기 모터 장착 배열에 대한 개략도이다.
도 14는 본 발명의 8개의 로터를 포함한 수직 이착륙 (VTOL) 항공기의 이착륙 구성을 도시한 사시도이다.
도 15는 본 발명의 8개의 로터를 포함한 수직 이착륙 (VTOL) 항공기의 전방 비행 구성을 도시한 사시도이다.
Claims (11)
- 수직 이착륙 (VTOL) 항공기에 있어서,
동체;
상기 동체의 대향 측면에 장착된 제1 및 제2 전방 날개-여기서 제1 및 제2 전방 날개는 각각 고정된 리딩 엣지(leading edge) 및 대체로 수평한 회동(pivot) 축을 중심으로 회동되는 후미 제어 표면을 구비함-;
각각이 로터를 구비하는 제1 및 제2 전기 모터-여기서 상기 제1 및 제2 전기 모터는 상기 각각의 날개에 장착되고, 상기 로터는 각각의 로터가 대체로 수직한 회전 축을 갖는 제1 위치 및 대체로 수평한 회전 축을 갖는 제2 위치 사이에서 상기 제어 표면과 함께 회동함-;
각각의 모터를 제어하는 제어 시스템;
을 포함하고,
상기 제어 시스템은 상기 회동 축을 중심으로 상기 제어 표면을 회동시키도록 회전 모멘트를 생성하기 위해 상기 제1 및 제2 전기 모터를 다른 회전 속도에서 선택적으로 작동하도록 구성되는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제1항에 있어서,
상기 제1 전기 모터의 추력 선(thrust line)은 상기 제2 전기 모터의 추력 선에 대해 각도 방향으로 오프셋되는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제1항에 있어서,
상기 제1 전기 모터는 상기 제어 표면 위에 위치되는 로터를 구비하고, 상기 제2 모터는 상기 제어 표면 아래에 위치되는 로터를 구비하여, 상기 제1 전기 모터의 추력 선은 상기 제2 전기 모터의 추력 선에 대해 대체로 평행하게 오프셋 되는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 제1 모터는 상기 제1 위치 및 상기 제2 위치 사이에서 상기 제어 표면을 움직이도록 하는 명령에 응답하여, 상기 제어 시스템에 의해 상기 제2 모터보다 더 빠른 회전 속도에서 작동되고,
상기 제1 모터는 상기 제2 위치 및 상기 제1 위치 사이에서 상기 제어 표면을 움직이도록 하는 명령에 응답하여, 상기 제어 시스템에 의해 상기 제2 모터보다 더 느린 회전 속도에서 작동되는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제1항 내지 제4항 중 어느 한 항에 있어서,
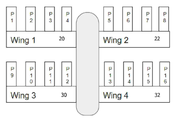
상기 각각의 날개는 각각이 로터를 구비하는 적어도 2개의 전기 모터를 구비하고, 쌍으로 배열되는 상기 로터는 쌍을 이룬 모터가 대체로 동일한 회전 속도로 회전할 때 임의의 회전 모멘트를 상쇄시키는 추력 선을 갖는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제1항 내지 제5항 중 어느 한 항에 있어서,
정지 비행 모드에서, 상기 제어 시스템은 항공기 및 유효 탑재량의 총 질량에 중력 가속도를 곱한 값과 동일한 전체 모터의 결합된 추력을 발생시키는 적절한 속도에서 상기 각각의 모터를 회전시키도록 구성되는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제1항 내지 제6항 중 어느 한 항에 있어서,
원하는 상기 제1 위치 및 상기 제2 위치에서 상기 제어 표면을 유지하기 위한 브레이크, 소형 액추에이터 또는 클램핑 장치를 추가적으로 포함하는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제7항에 있어서,
상기 브레이크 또는 클램핑 장치는 상기 제어 시스템에 의해 작동되는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제1항 내지 제8항 중 어느 한 항에 있어서,
상기 동체의 대향 측면에 장착된 제1 및 제2 후방 날개를 추가적으로 포함하고,
상기 동체로부터 가장 먼 각각의 전방 날개의 원단부는 연결 부재를 갖는 인접한 후방 날개의 원단부에 연결되어 박스형 날개 구조를 규정하는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 수직 이착륙 (VTOL) 항공기에 있어서,
동체;
상기 동체의 대향 측면에 장착된 제1 및 제2 전방 날개-여기서 상기 제1 및 제2 전방 날개는 각각 고정된 리딩 엣지 및 대체로 수평한 회동(pivot) 축을 중심으로 회동되는 후미 제어 표면을 구비함-;
제1 가변 피치 프로펠러를 구비하는 제1 전기 모터 및 제2 가변 피치 프로펠러를 구비하는 제2 전기 모터-여기서 상기 제1 및 제2 모터는 상기 각각의 날개에 장착되고, 상기 제1 및 제2 프로펠러는 각각의 프로펠러가 대체로 수직한 회전 축을 갖는 제1 위치 및 대체로 수평한 회전 축을 갖는 제2 위치 사이에서 상기 제어 표면과 함께 회동함-;
상기 각각의 가변 피치 프로펠러의 회전 속도 및/또는 블레이드(blade) 피치를 제어하기 위한 제어 시스템;
을 포함하고,
상기 제어 시스템은 상기 회동 축을 중심으로 상기 제어 표면이 회동하도록 회전 모멘트를 생성하기 위해 상기 제2 프로펠러에 대한 상기 제1 프로펠러의 피치를 변화시키도록 구성되는 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기. - 제1항 내지 제10항 중 어느 한 항에 있어서,
상기 모터는 상기 제어 시스템의 전자 속도 제어기로부터의 스위칭 주파수 변화에 응답하여 속도를 변화시키는 브러시리스 DC 모터인 것을 특징으로 하는 수직 이착륙 (VTOL) 항공기.
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2017903864A AU2017903864A0 (en) | 2017-09-22 | Wing tilt mechanism for electric vertical take-off and landing (VTOL) aircraft | |
| AU2017903864 | 2017-09-22 | ||
| AU2017904036A AU2017904036A0 (en) | 2017-10-06 | Wing tilt actuation system for electric vertical take-off and landing (VTOL) aircraft | |
| AU2017904036 | 2017-10-06 | ||
| AU2018901154A AU2018901154A0 (en) | 2018-04-06 | Wing tilt mechanism for electric vertical take-off and landing (VTOL) aircraft | |
| AU2018901154 | 2018-04-06 | ||
| PCT/AU2018/050962 WO2019056052A1 (en) | 2017-09-22 | 2018-09-06 | WING TILT OPERATING SYSTEM FOR VERTICAL TAKE-OFF AND LANDING ELECTRIC AIRCRAFT (ADAV) |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200057057A true KR20200057057A (ko) | 2020-05-25 |
| KR102650998B1 KR102650998B1 (ko) | 2024-03-26 |
Family
ID=65809451
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207011615A Active KR102627026B1 (ko) | 2017-09-22 | 2018-09-06 | 전기 수직 이착륙 (vtol) 항공기용 윙 틸트 구동 시스템 |
| KR1020207011614A Active KR102650998B1 (ko) | 2017-09-22 | 2018-09-06 | 전기 수직 이착륙 (vtol) 항공기용 윙 틸트 구동 시스템 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207011615A Active KR102627026B1 (ko) | 2017-09-22 | 2018-09-06 | 전기 수직 이착륙 (vtol) 항공기용 윙 틸트 구동 시스템 |
Country Status (19)
| Country | Link |
|---|---|
| US (2) | US12043376B2 (ko) |
| EP (3) | EP3684687B1 (ko) |
| JP (3) | JP7232834B2 (ko) |
| KR (2) | KR102627026B1 (ko) |
| CN (2) | CN111247066B (ko) |
| AU (4) | AU2018337666B2 (ko) |
| BR (1) | BR112020005611B1 (ko) |
| CA (2) | CA3075430A1 (ko) |
| ES (2) | ES2953004T3 (ko) |
| IL (2) | IL273315B2 (ko) |
| MX (2) | MX2020003021A (ko) |
| MY (2) | MY204504A (ko) |
| PH (2) | PH12020500507A1 (ko) |
| PL (2) | PL3684688T3 (ko) |
| RU (2) | RU2766634C2 (ko) |
| SG (2) | SG11202002180RA (ko) |
| SI (2) | SI3684688T1 (ko) |
| WO (2) | WO2019056052A1 (ko) |
| ZA (2) | ZA202001684B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102622742B1 (ko) | 2023-05-09 | 2024-01-08 | 함명래 | 비행 안정성이 향상되는 복합형 수직이착륙기 |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9694911B2 (en) * | 2014-03-18 | 2017-07-04 | Joby Aviation, Inc. | Aerodynamically efficient lightweight vertical take-off and landing aircraft with pivoting rotors and stowing rotor blades |
| EP3630603B1 (en) * | 2017-05-22 | 2025-04-09 | Overair, Inc. | Evtol aircraft using large, variable speed tilt rotors |
| EP3802322A4 (en) | 2018-05-31 | 2022-02-23 | Joby Aero, Inc. | POWER SYSTEM ARCHITECTURE AND FAULT TOLERANT VTOL AIRPLANE WITH IT |
| US12006048B2 (en) | 2018-05-31 | 2024-06-11 | Joby Aero, Inc. | Electric power system architecture and fault tolerant VTOL aircraft using same |
| WO2019232535A1 (en) | 2018-06-01 | 2019-12-05 | Joby Aero, Inc. | System and method for aircraft noise mitigation |
| US12545402B2 (en) * | 2018-06-23 | 2026-02-10 | Behrang Mehrgan | VTOL tail sitting aircraft with rotor blown nonplanar wing configuration |
| US10710741B2 (en) | 2018-07-02 | 2020-07-14 | Joby Aero, Inc. | System and method for airspeed determination |
| US11323214B2 (en) | 2018-09-17 | 2022-05-03 | Joby Aero, Inc. | Aircraft control system |
| US11912405B2 (en) * | 2018-10-02 | 2024-02-27 | Embraer S.A. | Vertical and short takeoff and landing (VSTOL) aircraft |
| IL263301B2 (en) * | 2018-11-25 | 2023-09-01 | Israel Aerospace Ind Ltd | Aircraft and the method of operation of aircraft |
| EP3891067B1 (en) | 2018-12-07 | 2024-01-17 | Joby Aero, Inc. | Aircraft control system and method |
| WO2020118310A1 (en) | 2018-12-07 | 2020-06-11 | Joby Aero, Inc. | Rotary airfoil and design method therefor |
| EP3899427B1 (en) | 2018-12-19 | 2025-09-03 | Joby Aero, Inc. | Vehicle navigation system |
| US11230384B2 (en) | 2019-04-23 | 2022-01-25 | Joby Aero, Inc. | Vehicle cabin thermal management system and method |
| WO2020219747A2 (en) | 2019-04-23 | 2020-10-29 | Joby Aero, Inc. | Battery thermal management system and method |
| US10988248B2 (en) | 2019-04-25 | 2021-04-27 | Joby Aero, Inc. | VTOL aircraft |
| USD933528S1 (en) * | 2019-04-30 | 2021-10-19 | Katla Aero AB | Aircraft |
| BR112021023948A2 (pt) | 2019-05-29 | 2022-02-08 | Craft Aerospace Tech Inc | Design de aeronave novo utilizando asas em tandem e um sistema de propulsão distribuída |
| GB2585864B (en) * | 2019-07-18 | 2022-04-27 | Gkn Aerospace Services Ltd | An aircraft |
| GB2601453B (en) * | 2019-07-18 | 2023-05-03 | Gkn Aerospace Services Ltd | An aircraft |
| JP7539683B2 (ja) * | 2019-09-19 | 2024-08-26 | 株式会社エアロネクスト | 飛行体 |
| CN119590627A (zh) | 2019-10-09 | 2025-03-11 | 小鹰公司 | 用于不同飞行模式的混合功率系统 |
| GB202007673D0 (en) * | 2020-05-22 | 2020-07-08 | Univ Nelson Mandela Metropolitan | A vertical take-off and landing aircraft, methods and systems for controlling a vertical take-off and landing aircraft |
| JP7828091B2 (ja) * | 2020-09-18 | 2026-03-11 | エーエムエスエル イノベーションズ ピーティーワイ リミテッド | 航空機構造 |
| US12444938B2 (en) | 2020-10-27 | 2025-10-14 | Wisk Aero Llc | Power distribution circuits for electrically powered aircraft |
| US12227290B2 (en) * | 2020-10-27 | 2025-02-18 | Wisk Aero Llc | Power distribution circuits for electrically powered aircraft |
| ES1269111Y (es) * | 2021-04-18 | 2021-09-17 | Alexandre Emilio Martin | Dispositivo aeronautico de propulsion en flap con motor de helice |
| US20220402603A1 (en) * | 2021-06-22 | 2022-12-22 | Kitty Hawk Corporation | Vehicle with tractor tiltrotors and pusher tiltrotors |
| WO2023282789A1 (ru) * | 2021-07-06 | 2023-01-12 | Владимир Анатольевич ПЕТРОВ | Летательный аппарат с вертикальными взлетом и посадкой |
| CN113353254B (zh) * | 2021-07-14 | 2023-02-28 | 空中舞者(威海)航空动力技术有限公司 | 一种垂直起降旋翼机 |
| US12420922B2 (en) | 2021-07-31 | 2025-09-23 | Supernal, Llc | Vertical take-off and landing craft systems and methods |
| CN114084344A (zh) * | 2021-08-23 | 2022-02-25 | 上海新云彩航空科技有限责任公司 | 一种带动力轮式起落架的多轴旋翼飞行器 |
| CN114313251B (zh) * | 2022-03-03 | 2022-06-21 | 天津斑斓航空科技有限公司 | 一种组合式飞行器主动倾转结构及飞行器 |
| US12134470B2 (en) | 2022-04-11 | 2024-11-05 | Hi-Lite Aircraft | Aircraft with side body articulating propulsion |
| US12479570B2 (en) | 2022-04-22 | 2025-11-25 | Supernal Llc | Rotor assembly |
| UA152017U (uk) * | 2022-09-06 | 2022-10-12 | Євген Олександрович Кононихін | Літальний апарат вертикального зльоту і посадки із замкнутим крилом |
| KR20240170008A (ko) | 2023-05-25 | 2024-12-03 | 김중훈 | 통합형 로터 날개를 장착한 다중 비행모드 항공기 |
| KR102712524B1 (ko) | 2023-10-16 | 2024-10-02 | 주식회사 유에이엠테크 | 비행 효율이 향상되는 텐덤형 수직이착륙기 |
| US20250137431A1 (en) * | 2023-10-25 | 2025-05-01 | Embraer S.A. | Submersible box-winged vehicle systems and methods for generating hydroelectric energy |
| US20250153870A1 (en) * | 2023-11-15 | 2025-05-15 | Virginia Tech Intellectual Properties, Inc. | Novel extended range vertical take-off and landing drone |
| US20250172947A1 (en) * | 2023-11-24 | 2025-05-29 | Xiaowei Xiong | Flying apparatus, aircraft, and method for controlling flight of flying apparatus |
| KR102787878B1 (ko) | 2024-07-02 | 2025-03-26 | 함명래 | 회전기립식 수직이착륙 텐덤기 |
| KR102806858B1 (ko) * | 2024-09-04 | 2025-05-13 | 주식회사 스카이드 | 수평 비행 멀티콥터 드론 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005168222A (ja) * | 2003-12-04 | 2005-06-23 | Tokyo R & D Co Ltd | 電動機駆動回路 |
| US20050178879A1 (en) * | 2004-01-15 | 2005-08-18 | Youbin Mao | VTOL tailsitter flying wing |
| WO2016135697A1 (en) * | 2015-02-27 | 2016-09-01 | Skybox Engineering S.R.L. | Tiltrotor with double mobile wing |
| US20160288903A1 (en) * | 2015-03-24 | 2016-10-06 | U.S.A. As Represented By The Administrator Of The National Aeronautics And Space Administration | Aerodynamically Actuated Thrust Vectoring Devices |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1498412A (en) * | 1920-02-18 | 1924-06-17 | Whiteside Howard Austin | Helico-plane |
| US3181810A (en) * | 1961-02-27 | 1965-05-04 | Curtiss Wright Corp | Attitude control system for vtol aircraft |
| FR94023E (fr) * | 1967-05-24 | 1969-06-20 | Bertin & Cie | Systeme sustentateur ou propulso sustentateur pour aéronefs. |
| US5046684A (en) * | 1989-02-09 | 1991-09-10 | Julian Wolkovitch | Airplane with braced wings and pivoting propulsion devices |
| US5417386A (en) * | 1993-01-25 | 1995-05-23 | Wernicke; Kenneth G. | Flying and road vehicle |
| RU2097272C1 (ru) * | 1993-12-30 | 1997-11-27 | Анатолий Васильевич Бобров | Экологичный гибридный летательный аппарат вертикального взлета и посадки с хранилищем для используемого в нем гелия |
| US5823468A (en) | 1995-10-24 | 1998-10-20 | Bothe; Hans-Jurgen | Hybrid aircraft |
| ITFI20030043A1 (it) * | 2003-02-19 | 2004-08-20 | Aldo Frediani | Velivolo biplano ad ali contrapposte ad elevata stabilita' statica |
| US7118066B2 (en) * | 2004-07-22 | 2006-10-10 | Norman Carter Allen | Tall V/STOL aircraft |
| CN1907806A (zh) | 2005-08-02 | 2007-02-07 | 韩培洲 | 前旋翼倾转式垂直起落飞机 |
| US7871033B2 (en) * | 2008-04-11 | 2011-01-18 | Karem Aircraft, Inc | Tilt actuation for a rotorcraft |
| JP2010057314A (ja) * | 2008-08-29 | 2010-03-11 | Kyocera Mita Corp | モータ制御装置及び画像形成装置 |
| US20110042510A1 (en) * | 2009-08-24 | 2011-02-24 | Bevirt Joeben | Lightweight Vertical Take-Off and Landing Aircraft and Flight Control Paradigm Using Thrust Differentials |
| US9187174B2 (en) | 2010-10-06 | 2015-11-17 | Donald Orval Shaw | Aircraft with wings and movable propellers |
| DE202012013513U1 (de) * | 2012-07-27 | 2017-05-12 | Jonathan Hesselbarth | Senkrecht startendes Flugzeug |
| US10071801B2 (en) * | 2013-08-13 | 2018-09-11 | The United States Of America As Represented By The Administrator Of Nasa | Tri-rotor aircraft capable of vertical takeoff and landing and transitioning to forward flight |
| DE102013109392A1 (de) * | 2013-08-29 | 2015-03-05 | Airbus Defence and Space GmbH | Schnellfliegendes, senkrechtstartfähiges Fluggerät |
| US9694911B2 (en) * | 2014-03-18 | 2017-07-04 | Joby Aviation, Inc. | Aerodynamically efficient lightweight vertical take-off and landing aircraft with pivoting rotors and stowing rotor blades |
| WO2015143098A2 (en) * | 2014-03-18 | 2015-09-24 | Joby Aviation, Inc. | Aerodynamically efficient lightweight vertical take-off and landing aircraft with pivoting rotors and stowing rotor blades |
| US10625852B2 (en) * | 2014-03-18 | 2020-04-21 | Joby Aero, Inc. | Aerodynamically efficient lightweight vertical take-off and landing aircraft with pivoting rotors and stowing rotor blades |
| CN106573677B (zh) | 2014-03-18 | 2020-09-15 | 杰欧比飞行有限公司 | 具有枢转旋翼和收拢旋翼桨叶的气动高效的轻型垂直起飞和着陆飞机 |
| GB2526517A (en) * | 2014-03-27 | 2015-12-02 | Malloy Aeronautics Ltd | Rotor-Lift Aircraft |
| RU2577931C1 (ru) * | 2015-01-13 | 2016-03-20 | Дмитрий Сергеевич Дуров | Гибридный самолет короткого взлета и посадки |
| DE102015207445B4 (de) * | 2015-04-23 | 2023-08-17 | Lilium GmbH | Tragfläche für ein Luftfahrzeug und Luftfahrzeug |
| DE102015006511A1 (de) | 2015-05-26 | 2016-12-01 | Airbus Defence and Space GmbH | Senkrechtstartfähiges Fluggerät |
| US20170297699A1 (en) | 2015-10-30 | 2017-10-19 | Sikorsky Aircraft Corporation | Quad rotor tail-sitter aircraft with rotor blown wing (rbw) configuration |
| WO2017096478A1 (en) * | 2015-12-11 | 2017-06-15 | Coriolis Games Corporation | Hybrid multicopter and fixed wing aerial vehicle |
| CN105882961A (zh) * | 2016-04-13 | 2016-08-24 | 邓阳平 | 一种可垂直起降的高速飞行器及其控制方法 |
| CN105730692B (zh) * | 2016-04-19 | 2018-04-17 | 北京航空航天大学 | 一种倾转四旋翼长航时复合式飞行器 |
| BR112018073801A2 (pt) | 2016-05-18 | 2019-02-26 | A^3 By Airbus, Llc | aeronave elétrica pilotada automaticamente para executar decolagens e aterrissagens verticais e método para controlar uma aeronave |
| CN109562828A (zh) * | 2016-06-03 | 2019-04-02 | 威罗门飞行公司 | 具有互补的成角度旋翼的垂直起降(vtol)有翼飞行器 |
| US10183746B2 (en) * | 2016-07-01 | 2019-01-22 | Bell Helicopter Textron Inc. | Aircraft with independently controllable propulsion assemblies |
| US10807707B1 (en) * | 2016-09-15 | 2020-10-20 | Draganfly Innovations Inc. | Vertical take-off and landing (VTOL) aircraft having variable center of gravity |
| JP7093467B2 (ja) * | 2018-05-10 | 2022-06-29 | ジョビー エアロ,インコーポレイテッド | 電気チルトロータ航空機 |
-
2018
- 2018-09-06 SG SG11202002180RA patent/SG11202002180RA/en unknown
- 2018-09-06 MX MX2020003021A patent/MX2020003021A/es unknown
- 2018-09-06 IL IL273315A patent/IL273315B2/en unknown
- 2018-09-06 EP EP18859252.1A patent/EP3684687B1/en active Active
- 2018-09-06 MY MYPI2020001388A patent/MY204504A/en unknown
- 2018-09-06 RU RU2020110832A patent/RU2766634C2/ru active
- 2018-09-06 US US16/647,817 patent/US12043376B2/en active Active
- 2018-09-06 AU AU2018337666A patent/AU2018337666B2/en active Active
- 2018-09-06 RU RU2020110837A patent/RU2766037C2/ru active
- 2018-09-06 JP JP2020537810A patent/JP7232834B2/ja active Active
- 2018-09-06 KR KR1020207011615A patent/KR102627026B1/ko active Active
- 2018-09-06 SG SG11202002182XA patent/SG11202002182XA/en unknown
- 2018-09-06 BR BR112020005611-1A patent/BR112020005611B1/pt active IP Right Grant
- 2018-09-06 CA CA3075430A patent/CA3075430A1/en active Pending
- 2018-09-06 WO PCT/AU2018/050962 patent/WO2019056052A1/en not_active Ceased
- 2018-09-06 SI SI201831144T patent/SI3684688T1/sl unknown
- 2018-09-06 ES ES18859252T patent/ES2953004T3/es active Active
- 2018-09-06 WO PCT/AU2018/050963 patent/WO2019056053A1/en not_active Ceased
- 2018-09-06 EP EP23164413.9A patent/EP4219303A1/en active Pending
- 2018-09-06 PL PL18859571.4T patent/PL3684688T3/pl unknown
- 2018-09-06 PL PL18859252.1T patent/PL3684687T3/pl unknown
- 2018-09-06 SI SI201830971T patent/SI3684687T1/sl unknown
- 2018-09-06 JP JP2020537809A patent/JP7174054B2/ja active Active
- 2018-09-06 KR KR1020207011614A patent/KR102650998B1/ko active Active
- 2018-09-06 EP EP18859571.4A patent/EP3684688B1/en active Active
- 2018-09-06 CN CN201880061296.4A patent/CN111247066B/zh active Active
- 2018-09-06 US US16/647,824 patent/US11535371B2/en active Active
- 2018-09-06 MY MYPI2020001387A patent/MY204489A/en unknown
- 2018-09-06 CA CA3075429A patent/CA3075429A1/en active Pending
- 2018-09-06 MX MX2020003022A patent/MX2020003022A/es unknown
- 2018-09-06 AU AU2018337069A patent/AU2018337069B2/en active Active
- 2018-09-06 CN CN201880061285.6A patent/CN111225853B/zh active Active
- 2018-09-06 IL IL273314A patent/IL273314B2/en unknown
- 2018-09-06 ES ES18859571T patent/ES2986122T3/es active Active
-
2020
- 2020-03-12 PH PH12020500507A patent/PH12020500507A1/en unknown
- 2020-03-12 PH PH12020500508A patent/PH12020500508A1/en unknown
- 2020-03-17 ZA ZA2020/01684A patent/ZA202001684B/en unknown
- 2020-03-17 ZA ZA2020/01683A patent/ZA202001683B/en unknown
- 2020-09-11 AU AU2020230337A patent/AU2020230337B2/en active Active
- 2020-09-11 AU AU2020230338A patent/AU2020230338B2/en active Active
-
2023
- 2023-02-20 JP JP2023024268A patent/JP7457175B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005168222A (ja) * | 2003-12-04 | 2005-06-23 | Tokyo R & D Co Ltd | 電動機駆動回路 |
| US20050178879A1 (en) * | 2004-01-15 | 2005-08-18 | Youbin Mao | VTOL tailsitter flying wing |
| WO2016135697A1 (en) * | 2015-02-27 | 2016-09-01 | Skybox Engineering S.R.L. | Tiltrotor with double mobile wing |
| US20160288903A1 (en) * | 2015-03-24 | 2016-10-06 | U.S.A. As Represented By The Administrator Of The National Aeronautics And Space Administration | Aerodynamically Actuated Thrust Vectoring Devices |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102622742B1 (ko) | 2023-05-09 | 2024-01-08 | 함명래 | 비행 안정성이 향상되는 복합형 수직이착륙기 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102650998B1 (ko) | 전기 수직 이착륙 (vtol) 항공기용 윙 틸트 구동 시스템 | |
| KR102594866B1 (ko) | 전기 틸트로터 항공기 | |
| US8256704B2 (en) | Vertical/short take-off and landing aircraft | |
| US8857755B2 (en) | Vertical/short take-off and landing passenger aircraft | |
| NZ762345B2 (en) | Wing tilt actuation system for electric vertical take-off and landing (vtol) aircraft | |
| NZ762347B2 (en) | Wing tilt actuation system for electric vertical take-off and landing (vtol) aircraft |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |