KR20200068732A - 2차원들로 라이다 시스템을 스캐닝하기 위한 방법들 및 장치들 - Google Patents
2차원들로 라이다 시스템을 스캐닝하기 위한 방법들 및 장치들 Download PDFInfo
- Publication number
- KR20200068732A KR20200068732A KR1020207014225A KR20207014225A KR20200068732A KR 20200068732 A KR20200068732 A KR 20200068732A KR 1020207014225 A KR1020207014225 A KR 1020207014225A KR 20207014225 A KR20207014225 A KR 20207014225A KR 20200068732 A KR20200068732 A KR 20200068732A
- Authority
- KR
- South Korea
- Prior art keywords
- platform
- lidar system
- frequency
- scanning
- scanning lidar
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 29
- 230000007246 mechanism Effects 0.000 claims abstract description 21
- 230000003287 optical effect Effects 0.000 claims abstract description 9
- 238000003384 imaging method Methods 0.000 claims description 11
- 230000033001 locomotion Effects 0.000 claims description 8
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 238000001514 detection method Methods 0.000 description 6
- 239000003990 capacitor Substances 0.000 description 3
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 229910000639 Spring steel Inorganic materials 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4817—Constructional features, e.g. arrangements of optical elements relating to scanning
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4814—Constructional features, e.g. arrangements of optical elements of transmitters alone
- G01S7/4815—Constructional features, e.g. arrangements of optical elements of transmitters alone using multiple transmitters
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Measurement Of Optical Distance (AREA)
Abstract
Description
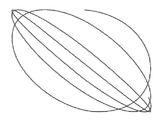
[0007] 도 2a 및 도 2b는 각각, 부분적으로 완전한 리사주 패턴 및 완성된 리사주 패턴을 도시한다.
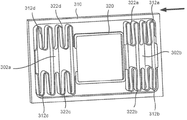
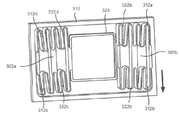
[0008] 도 3a 및 도 3b는 본 발명의 일부 실시예들에 따라, 라이다 시스템을 스캐닝하기 위한 플렉서 메커니즘을 개략적으로 예시한다.
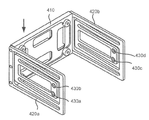
[0009] 도 4a 및 도 4b는 본 발명의 일부 다른 실시예들에 따라, 라이다 시스템을 스캐닝하기 위한 플렉서 메커니즘을 개략적으로 예시한다.
[0010] 도 5는 본 발명의 일부 추가의 실시예들에 따라, 라이다 시스템을 스캐닝하기 위한 플렉서 메커니즘을 개략적으로 예시한다.
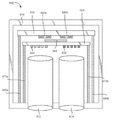
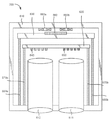
[0011] 도 6은 본 발명의 일부 실시예들에 따른 2-차원 스캐닝 라이다 시스템을 개략적으로 예시한다.
[0012] 도 7은 본 발명의 일부 다른 실시예들에 따른 2-차원 스캐닝 라이다 시스템을 개략적으로 예시한다.
[0013] 도 8은 본 발명의 일부 추가의 실시예들에 따른 2-차원 스캐닝 라이다 시스템을 개략적으로 예시한다.
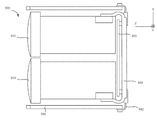
[0014] 도 9 및 도 10은 각각, 본 발명의 일부 실시예들에 따른 2-차원 스캐닝 라이다 시스템(900)의 사시도 및 평면도를 도시한다.
[0015] 도 11은 본 발명의 일부 실시예들에 따라, 도 9 및 도 10에 예시된 라이다 시스템에 사용될 수 있는 플렉서 구조의 평면도를 도시한다.
[0016] 도 12는 본 발명의 일부 실시예들에 따라, 스캐닝 라이다 시스템을 이용한 3-차원 이미징의 방법(1200)을 예시하는 간략화된 흐름도를 도시한다.
Claims (20)
- 스캐닝 라이다 시스템으로서,
고정된 프레임;
제1 플랫폼;
상기 제1 플랫폼 상에 장착된 제1 레이저 소스 및 제1 광검출기를 포함하는 제1 전기-광학 조립체(electro-optic assembly);
상기 제1 플랫폼을 상기 고정된 프레임에 플렉시블하게 커플링하는 제1 플렉서(flexure) 조립체;
상기 라이다 시스템의 광학 축에 실질적으로 수직인 평면에서 2차원들로 상기 고정된 프레임에 대하여 상기 제1 플랫폼을 스캐닝하도록 구성된 드라이브 메커니즘; 및
상기 드라이브 메커니즘에 커플링된 제어기를 포함하고,
상기 제어기는 상기 드라이브 메커니즘으로 하여금, 제1 방향에서 제1 주파수로 그리고 제2 방향에서 제2 주파수로 상기 제1 플랫폼을 스캐닝하게 하도록 구성되고, 상기 제2 주파수는 상기 제1 주파수와 유사하지만 동일하진 않은,
스캐닝 라이다 시스템. - 제1 항에 있어서,
상기 제2 주파수는 상기 전기-광학 조립체의 궤적이 리사주 도형(Lissajous figure)을 따르도록 상기 제1 주파수와 상이한,
스캐닝 라이다 시스템. - 제1 항에 있어서,
상기 제1 주파수와 제2 주파수의 비는 약 0.5 내지 약 2.0의 범위에 있는,
스캐닝 라이다 시스템. - 제1 항에 있어서,
상기 플렉서 조립체는 4개의 스프링들을 포함하고, 상기 4개의 스프링들 각각은 상기 제1 플랫폼의 개개의 코너를 상기 고정된 프레임에 연결하는,
스캐닝 라이다 시스템. - 제4 항에 있어서,
상기 4개의 스프링들 각각은 상기 제1 방향에서 제1 공진 주파수를 그리고 상기 제2 방향에서 제2 공진 주파수를 갖는 플렉시블한 로드를 포함하고, 상기 제1 주파수는 상기 제1 공진 주파수와 실질적으로 동일하고, 상기 제2 주파수는 상기 제2 공진 주파수와 실질적으로 동일한,
스캐닝 라이다 시스템. - 제1 항에 있어서,
상기 플렉서 조립체는 제1 스프링 및 제2 스프링을 포함하고, 상기 제1 스프링은 상기 제1 플랫폼의 제1 측면(lateral side)을 상기 고정된 프레임에 연결하고, 상기 제2 스프링은 상기 제1 측면에 대향하는 제2 측면을 상기 고정된 프레임에 연결하는,
스캐닝 라이다 시스템. - 제1 항에 있어서,
상기 드라이브 메커니즘은 상기 제1 플랫폼을 스캐닝하기 위해 상기 제1 플랫폼에 기계적으로 커플링되는,
스캐닝 라이다 시스템. - 제7 항에 있어서,
상기 드라이브 메커니즘은 상기 제1 플랫폼 상에 장착되는 보이스 코일 모터(voice coil motor)를 포함하는,
스캐닝 라이다 시스템. - 제1 항에 있어서,
제2 플랫폼; 및
상기 제2 플랫폼을 상기 고정된 프레임에 플렉시블하게 커플링하는 제2 플렉서 조립체를 더 포함하고,
상기 드라이브 메커니즘은, 상기 제1 플랫폼이 스캐닝됨에 따라, 상기 제2 플랫폼이 상기 제1 플랫폼의 모션의 방향과 상반되는 방향으로 이동하도록 상기 제2 플랫폼에 기계적으로 커플링되는,
스캐닝 라이다 시스템. - 제9 항에 있어서,
상기 제2 플랫폼 상에 장착된 제2 레이저 소스 및 제2 광검출기를 포함하는 제2 전기-광학 조립체를 더 포함하는,
스캐닝 라이다 시스템. - 제9 항에 있어서,
상기 드라이브 메커니즘은 상기 제2 플랫폼 상에 장착되는 보이스 코일 모터를 포함하는,
스캐닝 라이다 시스템. - 2-차원 스캐닝 라이다 시스템을 동작시키기 위한 공진기 구조로서,
고정된 프레임;
상기 스캐닝 라이다 시스템의 제1 전기-광학 조립체를 보유(carry)하기 위한 제1 플랫폼 ― 상기 제1 전기-광학 조립체는 제1 레이저 소스 및 제1 광검출기를 포함함 ― ; 및
상기 제1 플랫폼을 상기 고정된 프레임에 플렉시블하게 커플링하는 제1 세트의 스프링들을 포함하고,
상기 제1 세트의 스프링들은 상기 스캐닝 라이다 시스템의 광학 축에 실질적으로 수직인 평면에서 2개의 직교 방향들로 상기 제1 플랫폼을 스캐닝하도록 상기 2개의 직교 방향들로 구부러지게 구성되고,
상기 제1 세트의 스프링들은 상기 2개의 직교 방향들 중 제1 방향에서 제1 공진 주파수를 그리고 상기 2개의 직교 방향들 중 제2 방향에서 제2 공진 주파수를 가지며, 상기 제2 공진 주파수는 상기 제1 공진 주파수와 유사하지만 상이한,
2-차원 스캐닝 라이다 시스템을 동작시키기 위한 공진기 구조. - 제12 항에 있어서,
상기 제1 세트의 스프링들은 4개의 로드 스프링들을 포함하고, 상기 4개의 로드 스프링들 각각은 상기 제1 플랫폼의 개개의 코너를 상기 고정된 프레임에 연결하는,
2-차원 스캐닝 라이다 시스템을 동작시키기 위한 공진기 구조. - 제13 항에 있어서,
상기 4개의 로드 스프링들 각각은 타원형 단면, 또는 직사각형 단면, 또는 둥근 코너들을 갖는 직사각형 단면을 갖는 로드를 포함하는,
2-차원 스캐닝 라이다 시스템을 동작시키기 위한 공진기 구조. - 제13 항에 있어서,
상기 4개의 로드 스프링들 각각은 플렉시블한 부재를 통해 상기 제1 플랫폼에 연결되는,
2-차원 스캐닝 라이다 시스템을 동작시키기 위한 공진기 구조. - 제12 항에 있어서,
상기 제1 세트의 스프링들 각각은 판 스프링(leaf spring)을 포함하는,
2-차원 스캐닝 라이다 시스템을 동작시키기 위한 공진기 구조. - 제12 항에 있어서,
제2 플랫폼; 및
상기 제2 플랫폼을 상기 고정된 프레임에 플렉시블하게 커플링하는 제2 세트의 스프링들을 더 포함하고,
상기 제2 세트의 스프링들은 상기 2개의 직교 방향들로 상기 제2 플랫폼을 스캐닝하도록 상기 2개의 직교 방향들로 구부러지게 구성되고, 상기 제2 플랫폼의 모션의 방향은 상기 제1 플랫폼의 모션의 방향에 상반되는,
2-차원 스캐닝 라이다 시스템을 동작시키기 위한 공진기 구조. - 제17 항에 있어서,
상기 제2 플랫폼은 상기 제2 플랫폼의 모멘텀이 상기 제1 플랫폼의 모멘텀을 실질적으로 소거하도록 카운터 웨이트(counter weight)를 보유하는,
2-차원 스캐닝 라이다 시스템을 동작시키기 위한 공진기 구조. - 스캐닝 라이다 시스템을 이용한 3-차원 이미징의 방법으로서,
상기 라이다 시스템의 광학 축에 실질적으로 수직인 평면에서 2차원들로 상기 라이다 시스템의 전기-광학 조립체를 스캐닝하는 단계 ― 상기 전기-광학 조립체는 제1 레이저 소스 및 제1 광검출기를 포함하며, 상기 스캐닝하는 단계는,
제1 방향에서 제1 주파수로 상기 전기-광학 조립체를 스캐닝하는 단계; 및
상기 제1 방향과 실질적으로 직교하는 제2 방향에서 제2 주파수로 상기 전기-광학 조립체를 스캐닝하는 단계를 포함고, 상기 제2 주파수는 상기 제1 주파수와 유사하지만 동일하진 않음 ― ;
상기 전기-광학 조립체가 2차원들로 스캐닝됨에 따라, 상기 제1 레이저 소스를 사용하여, 복수의 포지션들에서 복수의 레이저 펄스들을 방출하는 단계;
상기 제1 광검출기를 사용하여, 하나 이상의 객체들로부터 반사된 복수의 레이저 펄스들의 각각의 개개의 레이저 펄스의 일부를 검출하는 단계;
프로세서를 사용하여, 각각의 개개의 레이저 펄스를 방출하는 것과 상기 개개의 레이저 펄스의 일부를 검출하는 것 사이의 비행 시간(time of flight)을 결정하는 단계; 및
상기 결정된 비행 시간에 기초하여 상기 하나 이상의 객체들의 3-차원 이미지를 구성하는 단계를 포함하는,
스캐닝 라이다 시스템을 이용한 3-차원 이미징의 방법. - 제19 항에 있어서,
상기 제2 주파수는 상기 전기-광학 조립체의 궤적이 리사주 도형(Lissajous figure)을 따르도록 상기 제1 주파수와 상이한,
스캐닝 라이다 시스템을 이용한 3-차원 이미징의 방법.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762574549P | 2017-10-19 | 2017-10-19 | |
| US62/574,549 | 2017-10-19 | ||
| US15/971,548 | 2018-05-04 | ||
| US15/971,548 US10921431B2 (en) | 2017-10-19 | 2018-05-04 | Apparatuses for scanning a lidar system in two dimensions |
| PCT/US2018/055363 WO2019079091A1 (en) | 2017-10-19 | 2018-10-11 | METHODS AND APPARATUSES FOR SCANNING A TWO-DIMENSIONAL LIDAR SYSTEM |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200068732A true KR20200068732A (ko) | 2020-06-15 |
| KR102183032B1 KR102183032B1 (ko) | 2020-11-25 |
Family
ID=66169280
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207014225A Active KR102183032B1 (ko) | 2017-10-19 | 2018-10-11 | 2차원들로 라이다 시스템을 스캐닝하기 위한 방법들 및 장치들 |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US10921431B2 (ko) |
| EP (1) | EP3698169B1 (ko) |
| JP (2) | JP6842734B2 (ko) |
| KR (1) | KR102183032B1 (ko) |
| CN (1) | CN111433630B (ko) |
| AU (1) | AU2018350806A1 (ko) |
| WO (1) | WO2019079091A1 (ko) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11556000B1 (en) | 2019-08-22 | 2023-01-17 | Red Creamery Llc | Distally-actuated scanning mirror |
| US12399279B1 (en) | 2016-02-15 | 2025-08-26 | Red Creamery Llc | Enhanced hybrid LIDAR with high-speed scanning |
| US12399278B1 (en) | 2016-02-15 | 2025-08-26 | Red Creamery Llc | Hybrid LIDAR with optically enhanced scanned laser |
| US12123950B2 (en) | 2016-02-15 | 2024-10-22 | Red Creamery, LLC | Hybrid LADAR with co-planar scanning and imaging field-of-view |
| US12223103B2 (en) | 2017-01-20 | 2025-02-11 | Adhawk Microsystems Inc. | Light scanner having closed-loop control based on optical feedback |
| US11435823B2 (en) | 2017-01-20 | 2022-09-06 | AdHawk Microsystems | Eye-tracker with improved beam scanning and method therefor |
| US11914768B2 (en) | 2017-01-20 | 2024-02-27 | Adhawk Microsystems Inc. | Resonant light scanner having drive-frequency control based on an electrical parameter |
| US10921431B2 (en) | 2017-10-19 | 2021-02-16 | Cepton Technologies Inc. | Apparatuses for scanning a lidar system in two dimensions |
| US12360361B2 (en) | 2017-12-26 | 2025-07-15 | Adhawk Microsystems Inc. | Advanced packaging for compact object-scanning modules |
| US11048327B2 (en) | 2017-12-28 | 2021-06-29 | AdHawk Microsystems | Timer-based eye-tracking |
| US11822020B2 (en) * | 2018-07-10 | 2023-11-21 | Cepton Technologies, Inc. | Scanning lidar systems with moving lens assembly |
| US11150348B2 (en) | 2019-10-02 | 2021-10-19 | Cepton Technologies, Inc. | Techniques for detecting cross-talk interferences in lidar imaging sensors |
| US12313784B2 (en) * | 2019-12-30 | 2025-05-27 | Cepton Technologies, Inc. | Half and quarter lissajous scan patterns for LiDAR |
| US12242001B2 (en) * | 2020-03-24 | 2025-03-04 | Cepton Technologies, Inc. | Scanning lidar with flood illumination for near-field detection |
| US11888289B2 (en) * | 2020-03-30 | 2024-01-30 | Namuga, Co., Ltd. | Light source module allowing differential control according to distance to subject and method for controlling the same |
| WO2021195978A1 (zh) * | 2020-03-31 | 2021-10-07 | 深圳市汇顶科技股份有限公司 | 飞行时间发射模组、飞行时间检测装置和电子设备 |
| WO2021195980A1 (zh) * | 2020-03-31 | 2021-10-07 | 深圳市汇顶科技股份有限公司 | 飞行时间发射模组、飞行时间检测装置和电子设备 |
| US20220091236A1 (en) * | 2020-08-10 | 2022-03-24 | Cepton Technologies, Inc. | Techniques for detecting and mitigating interference among multiple lidar sensors |
| US12175327B1 (en) | 2020-12-04 | 2024-12-24 | Scandit Ag | Camera start optimization for optical pattern decoding |
| US12079673B2 (en) | 2021-02-12 | 2024-09-03 | Scandit Ag | Optical pattern decoding in a real scene using overlay functionality |
| US11586285B2 (en) | 2021-02-17 | 2023-02-21 | Adhawk Microsystems Inc. | Methods and systems for forming images of eye features using a non-imaging, scanning-MEMS-based eye-tracking system |
| CN113687387B (zh) * | 2021-09-07 | 2024-03-01 | 广州大学 | 一种激光雷达扫描装置以及激光雷达扫描方法 |
| CN114325730B (zh) * | 2021-11-17 | 2022-12-13 | 杭州宏景智驾科技有限公司 | 一种大视场远距离激光雷达测试方法 |
| JP7758578B2 (ja) * | 2022-01-18 | 2025-10-22 | 株式会社小糸製作所 | 測定装置 |
| JP7758579B2 (ja) * | 2022-01-18 | 2025-10-22 | 株式会社小糸製作所 | 測定装置 |
| JP7758580B2 (ja) * | 2022-01-18 | 2025-10-22 | 株式会社小糸製作所 | 測定装置及び測定装置の製造方法 |
| WO2023140301A1 (ja) | 2022-01-18 | 2023-07-27 | 株式会社小糸製作所 | 測定装置及び測定装置の製造方法 |
| US20230296728A1 (en) * | 2022-03-18 | 2023-09-21 | Sony Group Corporation | Radar determination circuitry and radar determination method |
| US20230324558A1 (en) * | 2022-04-06 | 2023-10-12 | Faro Technologies, Inc. | Sensor field-of-view manipulation |
| CN116009009B (zh) * | 2022-05-26 | 2023-06-30 | 湖南阿秒光学科技有限公司 | Tof激光测量系统、激光发射和接收模组以及激光雷达 |
| US12468043B2 (en) * | 2022-06-10 | 2025-11-11 | GM Global Technology Operations LLC | LiDAR resonator with dynamic force equilibrium |
| JP2024031215A (ja) | 2022-08-26 | 2024-03-07 | 株式会社小糸製作所 | 測定装置、制御装置及びプログラム |
| CN116990787B (zh) * | 2023-09-26 | 2023-12-15 | 山东科技大学 | 基于机载激光雷达系统的扫描平台坐标系误差校正方法 |
| CN117890885B (zh) * | 2024-03-15 | 2024-06-04 | 之江实验室 | 一种激光雷达扫描机构及其扫描方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR960015058A (ko) * | 1993-07-13 | 1996-05-22 | 오노 시게오 | 진동 방지 장치 |
| US5529277A (en) * | 1994-09-20 | 1996-06-25 | Ball Corporation | Suspension system having two degrees of rotational freedom |
| JPH11168064A (ja) * | 1997-09-22 | 1999-06-22 | Nikon Corp | ステージ駆動方法、ステージ装置、及び露光装置 |
| KR20070012651A (ko) * | 2004-02-09 | 2007-01-26 | 마이크로비젼, 인코퍼레이티드 | 성능개선된 mems 스캐닝 시스템 |
| KR20070086874A (ko) * | 2004-11-30 | 2007-08-27 | 더 리젠츠 오브 더 유니버시티 오브 캘리포니아 | 프로브 마이크로스코피용 스캐너 |
| KR20080088501A (ko) * | 2007-03-29 | 2008-10-02 | 에이에스엠엘 네델란즈 비.브이. | 측정 시스템, 리소그래피 장치 및 이동가능한 물체의 위치의존적 신호를 측정하는 방법 |
| KR20100053465A (ko) * | 2008-11-12 | 2010-05-20 | 소니 주식회사 | 확산판 구동 장치 및 투사형 화상 표시 장치 |
| KR20100106517A (ko) * | 2008-01-22 | 2010-10-01 | 알카텔-루센트 유에스에이 인코포레이티드 | 발진 장치 및 방법 |
| JP4807695B2 (ja) * | 2000-07-24 | 2011-11-02 | 日本発條株式会社 | 探査光走査用アクチュエータ |
| KR20160070128A (ko) * | 2013-12-13 | 2016-06-17 | 인텔 코포레이션 | 가속도 측정 및 자이로스코피를 위한 광학 기계 센서 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2444283A1 (fr) * | 1978-12-14 | 1980-07-11 | Onera (Off Nat Aerospatiale) | Perfectionnements aux dispositifs vibrants pour le traitement d'un faisceau optique |
| US5254844A (en) | 1988-05-11 | 1993-10-19 | Symbol Technologies, Inc. | Mirrorless scanners with movable laser, optical and sensor components |
| US5099110A (en) | 1989-10-30 | 1992-03-24 | Symbol Technologies, Inc. | Power saving scanning arrangement |
| IL115477A0 (en) | 1995-10-01 | 1996-01-19 | Kaplan Harel Holdings Ltd | Scanner |
| JP2000338430A (ja) | 1999-05-28 | 2000-12-08 | Mitsubishi Electric Corp | ミラー傾動機構 |
| US20060192858A1 (en) * | 2005-02-28 | 2006-08-31 | Calvet Robert J | Oil damping for camera optical assembly |
| US7787134B2 (en) | 2005-11-09 | 2010-08-31 | The Boeing Company | Multiple fanned laser beam metrology system |
| JP2007155541A (ja) | 2005-12-06 | 2007-06-21 | Denso Corp | レーダ装置 |
| US7544945B2 (en) | 2006-02-06 | 2009-06-09 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Vertical cavity surface emitting laser (VCSEL) array laser scanner |
| US20080230611A1 (en) * | 2006-02-09 | 2008-09-25 | Microvision, Inc. | Variable Laser Beam Focus |
| CN101408672B (zh) | 2007-10-10 | 2010-06-02 | 先进微系统科技股份有限公司 | 激光指示装置 |
| US7986449B2 (en) | 2008-05-16 | 2011-07-26 | Microvision, Inc. | Induced resonance comb drive scanner |
| US8294881B2 (en) * | 2008-08-26 | 2012-10-23 | Honeywell International Inc. | Security system using LADAR-based sensors |
| JP5752040B2 (ja) | 2008-09-11 | 2015-07-22 | ニコン・メトロロジー・エヌヴェ | 対チャープfmcwコヒーレントレーザレーダー用の小型の光ファイバ配置 |
| JP5702059B2 (ja) | 2009-09-03 | 2015-04-15 | 日本信号株式会社 | 光測距装置 |
| LU91688B1 (en) * | 2010-05-17 | 2011-11-18 | Iee Sarl | Scanning 3D imager |
| JP5710279B2 (ja) | 2011-01-06 | 2015-04-30 | 日本信号株式会社 | 光測距装置 |
| CN102393516B (zh) | 2011-08-23 | 2013-05-29 | 中国人民解放军军事交通学院 | 激光雷达呈三维扫描的摆动装置 |
| AU2013237061B2 (en) | 2012-03-22 | 2015-11-26 | Apple Inc. | Gimbaled scanning mirror array |
| US8888275B2 (en) * | 2012-05-08 | 2014-11-18 | Microvision, Inc. | Scanned image projection system employing intermediate image plane |
| US10451740B2 (en) | 2016-04-26 | 2019-10-22 | Cepton Technologies, Inc. | Scanning lidar systems for three-dimensional sensing |
| CN106249248A (zh) * | 2016-08-31 | 2016-12-21 | 北京创想智控科技有限公司 | 旋转光学扫描测距装置及方法 |
| CN106226899B (zh) | 2016-09-12 | 2019-04-09 | 苏州迈客荣自动化技术有限公司 | 一种偏转镜的微振动平台 |
| CN111108406B (zh) | 2017-07-07 | 2024-06-04 | 艾耶股份有限公司 | 具有重新成像器的激光雷达发射器 |
| DE102017217653A1 (de) * | 2017-10-05 | 2019-04-11 | Robert Bosch Gmbh | Mikromechanisches Bauteil, Herstellungsverfahren für ein mikromechanisches Bauteil und Verfahren zum Anregen einer Bewegung eines verstellbaren Teils um eine Rotationsachse |
| JP2019074329A (ja) | 2017-10-12 | 2019-05-16 | パイオニア株式会社 | 測距装置及び光走査装置 |
| US10921431B2 (en) | 2017-10-19 | 2021-02-16 | Cepton Technologies Inc. | Apparatuses for scanning a lidar system in two dimensions |
-
2018
- 2018-05-04 US US15/971,548 patent/US10921431B2/en active Active
- 2018-10-11 CN CN201880078289.5A patent/CN111433630B/zh active Active
- 2018-10-11 EP EP18868039.1A patent/EP3698169B1/en active Active
- 2018-10-11 KR KR1020207014225A patent/KR102183032B1/ko active Active
- 2018-10-11 WO PCT/US2018/055363 patent/WO2019079091A1/en not_active Ceased
- 2018-10-11 JP JP2020522035A patent/JP6842734B2/ja active Active
- 2018-10-11 AU AU2018350806A patent/AU2018350806A1/en not_active Abandoned
-
2021
- 2021-01-06 US US17/142,616 patent/US11835656B2/en active Active
- 2021-02-05 JP JP2021017320A patent/JP7281214B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR960015058A (ko) * | 1993-07-13 | 1996-05-22 | 오노 시게오 | 진동 방지 장치 |
| US5529277A (en) * | 1994-09-20 | 1996-06-25 | Ball Corporation | Suspension system having two degrees of rotational freedom |
| JPH11168064A (ja) * | 1997-09-22 | 1999-06-22 | Nikon Corp | ステージ駆動方法、ステージ装置、及び露光装置 |
| JP4807695B2 (ja) * | 2000-07-24 | 2011-11-02 | 日本発條株式会社 | 探査光走査用アクチュエータ |
| KR20070012651A (ko) * | 2004-02-09 | 2007-01-26 | 마이크로비젼, 인코퍼레이티드 | 성능개선된 mems 스캐닝 시스템 |
| KR20070086874A (ko) * | 2004-11-30 | 2007-08-27 | 더 리젠츠 오브 더 유니버시티 오브 캘리포니아 | 프로브 마이크로스코피용 스캐너 |
| KR20080088501A (ko) * | 2007-03-29 | 2008-10-02 | 에이에스엠엘 네델란즈 비.브이. | 측정 시스템, 리소그래피 장치 및 이동가능한 물체의 위치의존적 신호를 측정하는 방법 |
| KR20100106517A (ko) * | 2008-01-22 | 2010-10-01 | 알카텔-루센트 유에스에이 인코포레이티드 | 발진 장치 및 방법 |
| KR20100053465A (ko) * | 2008-11-12 | 2010-05-20 | 소니 주식회사 | 확산판 구동 장치 및 투사형 화상 표시 장치 |
| KR20160070128A (ko) * | 2013-12-13 | 2016-06-17 | 인텔 코포레이션 | 가속도 측정 및 자이로스코피를 위한 광학 기계 센서 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019079091A1 (en) | 2019-04-25 |
| US10921431B2 (en) | 2021-02-16 |
| CN111433630A (zh) | 2020-07-17 |
| EP3698169A1 (en) | 2020-08-26 |
| EP3698169B1 (en) | 2024-03-27 |
| KR102183032B1 (ko) | 2020-11-25 |
| CN111433630B (zh) | 2022-05-03 |
| JP7281214B2 (ja) | 2023-05-25 |
| JP2021073468A (ja) | 2021-05-13 |
| JP2021500554A (ja) | 2021-01-07 |
| US11835656B2 (en) | 2023-12-05 |
| US20190120940A1 (en) | 2019-04-25 |
| AU2018350806A1 (en) | 2020-05-28 |
| JP6842734B2 (ja) | 2021-03-17 |
| US20210141065A1 (en) | 2021-05-13 |
| EP3698169A4 (en) | 2020-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102183032B1 (ko) | 2차원들로 라이다 시스템을 스캐닝하기 위한 방법들 및 장치들 | |
| JP7356737B2 (ja) | 移動レンズアセンブリを有するスキャニングライダ(LiDAR)システム | |
| JP7149612B2 (ja) | ライダシステム用の走査装置および方法 | |
| JP7505789B2 (ja) | トランシーバアレイを含むライダーシステム | |
| CN104520750B (zh) | 双轴式扫描镜 | |
| EP2828833B1 (en) | Gimbaled scanning mirror array | |
| US20210382151A1 (en) | Scanning lidar systems with scanning fiber | |
| US12313784B2 (en) | Half and quarter lissajous scan patterns for LiDAR | |
| US12253668B2 (en) | Two-axis scanning mirror using piezoelectric drivers and looped torsion springs | |
| US12306398B2 (en) | Two-axis scanning mirror using piezoelectric drivers and serpentine torsion springs | |
| US12619068B2 (en) | Optical element driving mechanism | |
| US20230341521A1 (en) | Double-sided flexure for linear lidar scanning | |
| US20210278627A1 (en) | Optical element driving mechanism |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20200518 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| A201 | Request for examination | ||
| A302 | Request for accelerated examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20200603 Comment text: Request for Examination of Application |
|
| PA0302 | Request for accelerated examination |
Patent event date: 20200603 Patent event code: PA03022R01D Comment text: Request for Accelerated Examination |
|
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200716 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20201015 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20201119 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20201119 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |