KR20200084249A - 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법 - Google Patents
이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법 Download PDFInfo
- Publication number
- KR20200084249A KR20200084249A KR1020190000427A KR20190000427A KR20200084249A KR 20200084249 A KR20200084249 A KR 20200084249A KR 1020190000427 A KR1020190000427 A KR 1020190000427A KR 20190000427 A KR20190000427 A KR 20190000427A KR 20200084249 A KR20200084249 A KR 20200084249A
- Authority
- KR
- South Korea
- Prior art keywords
- positioning
- mobile
- cooperative positioning
- cooperative
- agent
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
- H04W64/006—Locating users or terminals or network equipment for network management purposes, e.g. mobility management with additional information processing, e.g. for direction or speed determination
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/46—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for vehicle-to-vehicle communication [V2V]
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Traffic Control Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Abstract
본 발명은 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법을 개시한다.
Description
본 발명은 이동체의 성질을 반영하는 무선 네트워크에서 이동체간 협력 측위 사용 전략 및 네트워크 내에서 이동체의 개수를 반영한 스케줄링을 통한 최적 분산 측위를 달성하는 장치 및 방법에 관한 것이다.
5G의 차세대 무선 통신 시스템 중 가장 많은 주목을 받고 있는 분야는 자율 주행시스템으로, 그중에서도 이동체와 이동체의 통신 (Vehicle-to-Vehicle; V2V), 이동체와 기지국의 통신(Vehicle-to-Infrastructure; V2I)이 대표적이다.
이동체와 이동체의 통신(이하 V2V통신)은 기지국을 사용하지 않고 이동체와 이동체의 통신이 이루어지므로 이동체와 기지국의 통신(이하 V2I통신)으로 인한 기지국의 통신 부하를 감소할 수 있다. V2V통신을 이용하여 V2I통신에서 발생하는 통신 지연 시간을 회피함으로써 통신 지연 시간에 기인하여 발생할 수 있는 이동체의 안전 문제를 보완할 수 있다. 또한, 범지구 위치 결정 시스템(GPS)센서를 모든 이동체가 구비하고 있지 않기에 필수적인 통신 방법이다.
자율주행 시스템을 이루는 한 부분인 이동체 측위는 중앙 관리자의 통제가 있는 경우와 중앙 관리자의 통제가 없는 경우로 나눌 수 있다. 중앙 집중형 측위는 중앙 관리자의 통솔 하에 네트워크에 존재하는 각 이동체가 자신의 절대위치를 파악할 수 있는 것을 뜻한다. 그러나 중앙 관리자의 통제가 없는 경우 각 이동체는 스스로 자신의 위치를 파악할 수 있는 기능이 필요하며 이를 자기 측위(self-localization)라 한다. 자기 측위 네트워크 내에는 자신의 절대위치를 항상 알고 있는 앵커(anchor) 이동체와 모르는 에이전트(agent) 이동체로 구분된다. 자기 측위 방법은 앵커(anchor) 이동체와 에이전트(agent) 이동체의 V2V통신으로 네트워크 내의 각 이동체의 절대위치를 파악한다.
앵커(anchor) 이동체가 GPS로부터 획득한 절대위치, 앵커(anchor) 이동체와 에이전트(agent) 이동체의 속도계(speedometer) 그리고 관측 파라미터를 초기 위치 추정에 이용한다.
도 1은 이동체 간 측위 기법을 달성하기 위한 관측 파라미터 시스템 모델을 도시한 도면이다.
추정하고자 하는 자동차를 에이전트 j, 상대 자동차를 에이전트 i로 표시하고 관측 파라미터를 z로 나타낸다. 관측 파라미터 z는 상대거리  와 상대 방위각 로
와 상대 방위각 로  로 구성된다.
로 구성된다.
V2V 네트워크에서 정확한 측위를 달성하기 위해 가장 기본적인 것은 협력측위 기술의 사용 여부 결정이다.
임의의 이동체는 자신의 위치를 추정하기 위하여 주변 이동체의 관측 파라미터를 측정한다. 협력 측위 기술의 사용 여부 결정이란 다음을 일컫는다. 임의의 이동체가 주변 이동체와 반복적으로 메시지를 주고받는 협력 측위를 통하여 자신의 절대위치 추정 정확도를 높일 것인지 혹은 주변 이동체들의 관측 파라미터 정보와 자신의 속도센서를 기반으로 위치를 추정하여 측위를 달성할 것인지 결정하는 전략이다.
자율 주행 통신 이동 시스템에서 채널 상태 변화에 따른 무선 자원을 효율적으로 이용하여 양질의 서비스를 사용자에게 제공하기 위해 사용되는 기술로 스케줄링이 있다.
상기한 종래기술의 문제점을 해결하기 위해, 본 발명은 측위의 신뢰성을 향상시킬 수 있는 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법을 제안하고자 한다.
상기한 바와 같은 목적을 달성하기 위하여, 본 발명의 일 실시예에 따르면, 모든 이동체가 범지구 위치 결정 시스템(GPS)를 구비하지 않은 V2V통신 네트워크 환경에서 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법에 있어서, 앵커(Anchor)이동체와 에이전트(Agent)이동체의 초기 위치 추정의 신뢰도를 평가하는 단계; 이동체 간 측위 기법 달성을 위한 관측 파라미터를 측정하는 단계; 관측 파라미터의 질을 평가하는 단계; 관측 파라미터의 질에 따라 협력 측위 유무 전략을 결정하는 단계; 협력 측위 사용 시 이동체 개수에 따른 협력 측위 스케줄링 전략을 결정하는 단계; 각 이동체마다 결정된 상기 현재 위치에 대한 정보를 메시지 형태로 브로드캐스팅 하는 단계; 및 상기 모든 단계를 포함한 협력측위를 달성하는 방법이 제공된다.
본 발명에 따르면, 무선 네트워크 및 이동체의 주변 환경에 따라 협력 측위 기술의 사용 여부를 결정하고, 협력 측위 사용 시 네트워크 내에 존재하는 이동체 개수를 고려함으로써 자율 주행 구현에 있어서 중요한 요소인 측위의 신뢰성 향상을 기대할 수 있다.
도 1은 이동체 간 측위 기법을 달성하기 위한 관측 파라미터 시스템 모델을 도시한 도면이다.
도 2는 본 발명에 해당하는 이동체의 협력 측위 유무의 전략 및 스케줄링 결정을 설명하기 위한 동작 흐름도이다.
도 3은 앵커 차량의 구조를 도시한 것이다.
도 4는 에이전트 차량의 구조를 도시한 것이다.
도 5는 Agent 이동체 수 및 anchor 이동체로부터의 중심 거리에 따른 절대 오류 경향성이다.
도 6은 초기 위치 정확도에 따른 협력 측위 유무 전략을 위한 판별 기준의 예를 도시한 것이다.
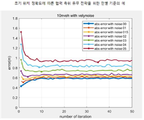
도 7은 자동차의 개수별 수렴 지점을 도시한 것이다.
도 2는 본 발명에 해당하는 이동체의 협력 측위 유무의 전략 및 스케줄링 결정을 설명하기 위한 동작 흐름도이다.
도 3은 앵커 차량의 구조를 도시한 것이다.
도 4는 에이전트 차량의 구조를 도시한 것이다.
도 5는 Agent 이동체 수 및 anchor 이동체로부터의 중심 거리에 따른 절대 오류 경향성이다.
도 6은 초기 위치 정확도에 따른 협력 측위 유무 전략을 위한 판별 기준의 예를 도시한 것이다.
도 7은 자동차의 개수별 수렴 지점을 도시한 것이다.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 상세하게 설명하고자 한다.
그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
도 2는 본 발명에 해당하는 이동체의 협력 측위 유무의 전략 및 스케줄링 결정을 설명하기 위한 동작 흐름도이다.
도 2를 참조하면, LTE 네트워크상에서 이동체 센서로 측정한 주변 이동체와의 거리정보와 각도 정보를 기반으로 이동체의 위치 정보를 파악한다.
측위 방법을 결정지을 때 영향을 미치는 대표적인 환경 변수로 GPS를 이용하여 얻은 절대위치의 정확도, anchor 이동체와 agent 이동체 거리, 이동체 간 메시지를 주고받는 채널 환경, 이동체 속도 측정 센서의 정확도, 통신 노이즈 등이 있다.
위에서 기술한 환경 변수의 분산에 따라 협력 측위 여부를 결정한다.
환경 변수의 분산이 작은 경우 협력 측위를 사용하지 않으며, 분산이 큰 경우 협력 측위를 사용함으로써 측위 정확도를 높이는 방법으로 협력 측위 유무 전략을 이용한다.
결정된 측위 방법을 이용하여 네트워크 내에서 이동체의 개수를 고려하여 통신 스케줄링을 결정한다.
기본적으로 이동체 간 주고받는 메시지 모델은 GMP(General Message Passing) 알고리즘과 SPAWN (Sum Product Algorithm over Wireless Network) 알고리즘에 기반을 둔 관측 파라미터의 우도 함수를 입력으로 두고 반복되는 시간마다 에이전트 j 자동차의 위치를 추정한다.
이동체 간 메시지를 반복적으로 교환함으로써 네트워크 내에 존재하는 이동체의 수와 무관하게 측위 오차의 수렴성을 보장한다.
도 3은 앵커 차량의 구조를 도시한 것이다.
도 4는 에이전트 차량의 구조를 도시한 것이다.
도 5는 Agent 이동체 수 및 anchor 이동체로부터의 중심 거리에 따른 절대 오류 경향성이다.
도 6은 초기 위치 정확도에 따른 협력 측위 유무 전략을 위한 판별 기준의 예를 도시한 것이다.
도 7은 자동차의 개수별 수렴 지점을 도시한 것이다.
상기한 본 발명의 실시예는 예시의 목적을 위해 개시된 것이고, 본 발명에 대한 통상의 지식을 가지는 당업자라면 본 발명의 사상과 범위 안에서 다양한 수정, 변경, 부가가 가능할 것이며, 이러한 수정, 변경 및 부가는 하기의 특허청구범위에 속하는 것으로 보아야 할 것이다.
Claims (1)
- 모든 이동체가 범지구 위치 결정 시스템(GPS)를 구비하지 않은 V2V통신 네트워크 환경에서 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법에 있어서,
앵커(Anchor)이동체와 에이전트(Agent)이동체의 초기 위치 추정의 신뢰도를 평가하는 단계;
이동체 간 측위 기법 달성을 위한 관측 파라미터를 측정하는 단계;
관측 파라미터의 질을 평가하는 단계; 관측 파라미터의 질에 따라 협력 측위 유무 전략을 결정하는 단계;
협력 측위 사용 시 이동체 개수에 따른 협력 측위 스케줄링 전략을 결정하는 단계;
각 이동체마다 결정된 상기 현재 위치에 대한 정보를 메시지 형태로 브로드캐스팅 하는 단계; 및
상기 모든 단계를 포함한 협력측위를 달성하는 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190000427A KR20200084249A (ko) | 2019-01-02 | 2019-01-02 | 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190000427A KR20200084249A (ko) | 2019-01-02 | 2019-01-02 | 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200084249A true KR20200084249A (ko) | 2020-07-10 |
Family
ID=71604278
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190000427A Withdrawn KR20200084249A (ko) | 2019-01-02 | 2019-01-02 | 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200084249A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022174374A1 (zh) * | 2021-02-18 | 2022-08-25 | 北京小米移动软件有限公司 | 一种用户设备定位验证的确认方法及装置 |
| WO2024072062A1 (ko) * | 2022-09-27 | 2024-04-04 | 엘지전자 주식회사 | Sl 및 uu 링크 기반의 조인트 측위 방법 및 장치 |
-
2019
- 2019-01-02 KR KR1020190000427A patent/KR20200084249A/ko not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022174374A1 (zh) * | 2021-02-18 | 2022-08-25 | 北京小米移动软件有限公司 | 一种用户设备定位验证的确认方法及装置 |
| CN115516935A (zh) * | 2021-02-18 | 2022-12-23 | 北京小米移动软件有限公司 | 一种用户设备定位验证的确认方法及装置 |
| WO2024072062A1 (ko) * | 2022-09-27 | 2024-04-04 | 엘지전자 주식회사 | Sl 및 uu 링크 기반의 조인트 측위 방법 및 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20230100826A1 (en) | Throughput Enhancement by Location-Based Power Adjustment in 5G and 6G | |
| US9807566B2 (en) | Method and device for adjustment of at least one parameter of a communication system | |
| CN112867146A (zh) | 锚点终端确定、信息发送方法、通信节点及存储介质 | |
| EP4014610B1 (en) | Positioning | |
| KR20090004185A (ko) | 통신 시스템에서 통신 모드 결정 방법 및 시스템 | |
| KR101770323B1 (ko) | 기지국 및 타겟 단말의 통신 방법 | |
| JP7110368B2 (ja) | 移動する基地局からのハンドオーバ | |
| JP7581768B2 (ja) | 電波マップ生成装置、電波マップ提供装置、電波マップ取得利用装置、及びプローブ情報送信装置 | |
| JP2023532770A (ja) | 改善された位置決めのためのビーム配向誤差の較正 | |
| KR20200084249A (ko) | 이동체의 협력 측위 유무 전략 및 스케줄링 결정 달성 장치 및 방법 | |
| EP4262262B1 (en) | Radio wave map provision device, and radio wave map acquisition usage device | |
| EP3366070B1 (en) | Determination of reference signal transmission pattern | |
| JP2025516118A (ja) | サイドリンク通信のための測位用参照信号の管理 | |
| JPWO2016092616A1 (ja) | データ提供システム | |
| KR101899661B1 (ko) | 이동 비콘의 실내 위치 추정 시스템 및 그 방법 | |
| JP2018056961A (ja) | 通信制御装置、通信システムおよび通信方法 | |
| US20250184852A1 (en) | Methods and apparatus for using machine learning to facilitate network handoffs between access points | |
| US11589419B2 (en) | Communication system, communication device, communication server, computer-readable storage medium and method of controlling a connection between the communication device and an access point | |
| US8494562B2 (en) | Method of providing location information in wireless communication system | |
| JP6841502B2 (ja) | 通信装置、基地局選択方法および基地局選択プログラム | |
| EP4569959A1 (en) | Priority criteria for positioning information | |
| CN118901258A (zh) | 侧链路测距和定位 | |
| JP5056850B2 (ja) | 移動体通信システムおよび位置登録方法 | |
| JP7726413B2 (ja) | サイドリンク通信のための測位用参照信号の送信 | |
| JP7825629B2 (ja) | 調整可能な帯域幅を用いるユーザ機器対応のサイドリンク測距 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190102 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |