KR20200084278A - 향 발산기능을 갖는 로봇 청소기 및 그의 제어 방법 - Google Patents
향 발산기능을 갖는 로봇 청소기 및 그의 제어 방법 Download PDFInfo
- Publication number
- KR20200084278A KR20200084278A KR1020190028505A KR20190028505A KR20200084278A KR 20200084278 A KR20200084278 A KR 20200084278A KR 1020190028505 A KR1020190028505 A KR 1020190028505A KR 20190028505 A KR20190028505 A KR 20190028505A KR 20200084278 A KR20200084278 A KR 20200084278A
- Authority
- KR
- South Korea
- Prior art keywords
- driving
- fragrance
- cleaner
- robot
- cleaning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4038—Disk shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
- A47L11/4083—Liquid supply reservoirs; Preparation of the agents, e.g. mixing devices
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4097—Means for exhaust-air diffusion; Exhaust-air treatment, e.g. air purification; Means for sound or vibration damping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- C—CHEMISTRY; METALLURGY
- C02—TREATMENT OF WATER, WASTE WATER, SEWAGE, OR SLUDGE
- C02F—TREATMENT OF WATER, WASTE WATER, SEWAGE, OR SLUDGE
- C02F1/00—Treatment of water, waste water, or sewage
- C02F1/48—Treatment of water, waste water, or sewage with magnetic or electric fields
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/648—Performing a task within a working area or space, e.g. cleaning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D3/00—Control of position or direction
- G05D3/12—Control of position or direction using feedback
- G05D3/14—Control of position or direction using feedback using an analogue comparing device
- G05D3/18—Control of position or direction using feedback using an analogue comparing device delivering a series of pulses
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2601/00—Washing methods characterised by the use of a particular treatment
- A47L2601/06—Electrolysed water
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/10—Specific applications of the controlled vehicles for cleaning, vacuuming or polishing
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Water Supply & Treatment (AREA)
- Environmental & Geological Engineering (AREA)
- Organic Chemistry (AREA)
- Hydrology & Water Resources (AREA)
- Life Sciences & Earth Sciences (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
Description
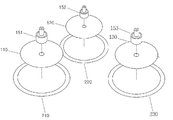
도 2는 본 발명의 일 실시 예에 따른 로봇 청소기의 개념도.
도 3은 본 발명의 실시 예에 따른 로봇 청소기의 요부 분해 사시도.
도 4는 본 발명의 일 실시 예에 따른 로봇 청소기를 나타내는 블록도.
도 5는 본 발명의 일 실시 예에 따른 로봇 청소기의 제어 방법을 나타내는 흐름도.
도 6은 본 발명의 향기 약액 도포장치 분해 사시도.
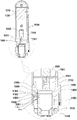
도 7은 본 발명의 향기 약액 도포장치 단면도 및 요부 단면도.
도 8은 본 발명의 향기 약액 도포장치의 요부 확대 단면도.
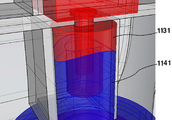
도 9는 본 발명의 향기 약액 도포장치의 회전모터 및 상하 구동 실린더 구성도.
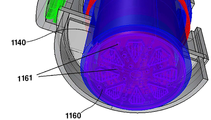
도 10은 본 발명의 향기 약액 도포장치의 회전모터 및 상하 구동 실린더 요부 확대도.
도 11은 본 발명의 향기 약액 도포장치의 임시고정수단 구성도.
도 12는 본 발명의 향기 약액 도포장치의 임시고정수단 다른 각도 구성도.
도 13은 본 발명의 약액 통과용 홀 구성도.
도 14는 본 발명의 블록도.
도 15는 본 발명의 제어 순서도.
도 16은 본 발명의 물통 설치 개념도.
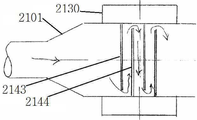
도 17은 본 발명의 이온수 공급 개념도.
도 18은 본 발명의 칸막이 제 1 실시예도.
도 19는 본 발명의 칸막이 제 2 실시예도.
20 : 범퍼 110: 제1 회전 부재
120: 제2 회전 부재 130: 감지부
140: 통신부 150: 구동부
160: 저장부 170: 제어부
180: 입력부 185: 출력부
190 : 전원 공급부
Claims (13)
- 로봇 청소기에 있어서,
본체와;
상기 본체에 구비되어 상기 로봇 청소기의 주행을 위한 동력을 공급하는 구동부와;
상기 구동부의 동력에 의하여 제1 회전축, 제2 회전축을 중심으로 각각 회전 운동하여 상기 로봇 청소기의 주행을 위한 이동력원을 제공하고, 습식 청소를 위한 클리너가 각각 고정 가능한 제1, 제2, 제3 회전 부재와;
상기 로봇 청소기의 청소 주행 패턴을 결정하고, 상기 결정된 청소 주행 패턴에 따라 제1 측면 방향으로 회전하며 전진 주행하는 제1 주행 단계 및 상기 제1 측면의 반대인 제2 측면 방향으로 회전하며 전진 주행하는 제2 주행 단계를 순차적으로 반복하면서 주행하도록 상기 제1, 제2, 제3 회전 부재의 회전을 제어하는 제어부와;
상기 본체의 일단에 설치되어 청소기 가동시 향기를 외부로 발산하는 향기도포장치를 포함하여 구성함을 특징으로 하는 향 발산기능을 갖는 로봇 청소기. - 제 1 항에 있어서,
상기 향기도포장치(1100)는,
하우징(1110)과;
상기 하우징(1110)의 내부에 설치되며 외부에서 전력을 공급받아 전기를 충전후 장치에 전기를 제공하는 배터리(1120)와;
상기 배터리에 전기적으로 연결되어 배터리로부터 전력을 공급받아 이를 기계적인 회전운동으로 변환시키는 회전모터(1130)와;
상기 회전모터의 중심축상에 설치되어 회전모터의 회전에 상응하여 회전하되, 저면이 파형 형태로 이루어져 굴곡진 파형 형태가 연속적으로 회전하는 모터축(1131)과;
상기 회전모터의 하단에 위치되며 회전모터의 회전을 왕복 수직운동으로 전환하여 상하로 승하강하면서 유동되는 상하구동 실린더(1140)와;
상기 상하구동 실린더(1140)의 상부에 위치하되 중심축상에 위치되고, 회전모터(1130)의 모터축(1131)에 접면되면서 기계적으로 접촉되며, 회전모터(1130)의 모터축(1131)과 결합 및 분리를 반복하면서 승하강 동작을 하는 회전축(1141)과;
상기 상하 구동 실린더(1140)의 외주연에 설치하되 일측이 하우징 내측의 걸림턱에 고정되고 타측이 상하 구동 실린더의 걸림턱에 고정되어 상하 구동 실린더를 탄발지지하여 상하 구동 실린더가 승하강 작동을 유지할 수 있도록 하는 승하강 지지용 탄발 스프링(1150)과;
상기 상하 구동 실린더(1140)의 내측에 삽입 결합되고, 전체적으로 실린더 형상이고 저면에 약물 통과용 홀(1161)이 다수개 설치되어 이루어지며, 상하 구동 실린더의 움직임에 따라 상하로 유동하면서 약물을 공급하는 향기 약물 도포기(1160)와;
일측은 향기 약물 도포기(1160)에 결합되고 타측은 하우징(1110)의 일단에 결합되며, 하우징을 기준으로 상하 구동 실린더 및 향기 약물 도포기(1160)를 동시에 임시 고정시켜 향기 약물 도포기(1160)가 중력작용에 의해서 아래로 추락하는 것을 막는 향기 약물 도포기 임시 고정수단(1180)을 포함하여 구성되어 이루어지는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기. - 제 2 항에 있어서,
상기 향기 약물 도포기 임시 고정수단(1180)은,
끝단이 날카로운 쐐기 형태로 이루어지며 상하구동 실린더의 결합홀 및 약물 도포기의 결합홀을 통해 강제 끼움 결합되어 향기 약물 도포기가 상하구동 실린더의 내주연에 결합된 상태를 유지시키는 걸림용 후크(1181)와;
상기 걸림용 후크(1181)에 사선 방향으로 일체로 연결되며 회전운동에 의해서 걸림용 후크(1181)가 시계방향 또는 반시계 방향으로 움직이도록 유도하는 연결편(1182)과;
상기 연결편(1182)과 걸림용 후크(1181) 사이에 설치되며 연결편이 회전되는 것을 지지하는 회전 지지용 힌지(1183)와;
상기 연결편(1182)과 상하구동 실린더(1140) 사이에 설치되어 연결편을 외측으로 밀어서 걸림용 후크(1181)가 시계 반대방향으로 유동되어 약물 도포기가 상하구동 실린더에 결합된 상태를 유지시키는 기능을 하며, 외부의 힘에 의해서 연결편이 눌러져서 상하구동 실린더 방향으로 압착되면 걸림용 후크(1181)가 상하구동 실린더(1140) 및 약물 도포기(1160)로부터 분리되면서 약물 도포기(1160)가 상하구동 실린더(1140)로부터 탈거되도록 유도하는 지지용 스프링(1184)과;
상기 연결편(1182)의 끝단부에 설치되며 상하구동 실린더(1140)의 상하 유동에 따라 걸림용 후크(1181) 및 연결편(1182)이 상하로 움직일때 동시에 움직이는 슬라이딩 유동편(1185)와;
상기 슬라이딩 유동편(1185)과 슬라이딩 결합되어 슬라이딩 유동편(1185)의 상하 움직임을 지지하며, 향기 약물 도포기(1160)를 교체시에 상하구동 실린더(1140) 방향으로 푸시하여 연결편(1182)을 누름으로서 연결편(1182)이 회전지지용 힌지핀(1183)을 중심으로 회전하게 되어 걸림용 후크(1181)가 상하구동 실린더(1140) 및 약물 도포기(1160)로부터 분리되면서 향기 약물 도포기(1160)가 상하구동 실린더(1140)로부터 탈거되도록 유도하는 푸시버튼(1186)을 포함하여 구성함을 특징으로 하는 향 발산기능을 갖는 로봇 청소기. - 제 1 항에 있어서,
상기 본체에 이온수 공급수단(2100)을 더 구비하고,
상기 이온수 공급수단(2100)은,
전자기장을 발생시키는 장치를 수전류에 부착하여 물의 이온에너지를 상승시키기 위해,
배관에 구비되며, 수전 밸브를 열면 수압에 의해 이동자석이 이동하여 리드스위치를 선택적으로 스위칭시켜 전자기장이 발생하도록 전원 스위칭회로를 구비한 리드스위치 작동수단과;
배관을 통해 물이 통과되고, 코일이 감기는 보빈(Bobbin)과;
보빈의 외주면에 권취되며, 전류를 흘리면 자속을 발생하고, 전자 유도나 전자력의 작용을 촉진시키는 코일(Coil)과;
코일(Coil)에 연결되며, 전자기장과 유도기전력을 발생시키면서 반파직류를 만드는 적어도 하나 이상의 다이오드(diode)와;
코일(Coil)에 연결되며, 교류(AC) 전기를 공급해 주는 전원과 전기회로를 개폐시키는 리드스위치와;
상기 배관의 내측에 설치되어 이온수를 고르게 섞는 역할을 하는 믹싱수단을 포함하여 이루어지는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기. - 제 4 항에 있어서,
상기 믹싱수단은,
가장자리에 홀이 형성되어 배관을 통과하는 물이 가장자리홀을 통해 통과하도록 유도하는 제 1 칸막이와,
상기 제 1 칸막이에 일정거리 이격되어 설치하되 중앙에 홀이 형성되어 제 1 칸막이를 통과한 물이 중앙홀을 통해 통과하면서 이온수가 섞이도록 유도하는 제 2 칸막이를 구비하여 이루어지며,
상기 제 1 칸막이와 제 2 칸막이가 다수개 배열되어 이루어지는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기. - 제 4 항에 있어서,
상기 믹싱수단은,
하부에 홀을 형성하여 오픈된 제 3 칸막이와, 상부에 홀을 형성하여 오픈된 제 4 칸막이를 구비하며, 상기 제 3 칸막이와 제 4 칸막이를 순차적으로 다수개 배열하여 구성하여 이루어지는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기. - 청소기를 구동하면 제 1 회전부재와 제 2 회전부재 및 제 3 회전부재에 전원이 공급되어 청소기 본체의 전후진 또는 일정각도로 이동 준비를 하는 단계와;
제 1 회전부재 및 제 2 회전부재의 작동에 따라 청소기 본체의 전후진 또는 일정각도 이동하면서 청소를 하는 단계와;
제 1 회전부재와 제 2 회전부재의 작동에 따라 청소기 본체가 움직일때 비직진성으로 요동치면서 움직이는지 확인하는 단계와;
상기 단계에서 비직진성이 확인되면 제 3 회전부재를 구동하여 청소기 본체의 방향성을 보정함으로서 청소기 본체의 직진성을 유지시키는 단계와;
청소기가 구동되면 향을 외부로 발산시키는 향 발산단계를 포함하고;
본체와;
상기 본체에 구비되어 상기 로봇 청소기의 주행을 위한 동력을 공급하는 구동부와;
상기 구동부의 동력에 의하여 제1 회전축, 제2 회전축을 중심으로 각각 회전 운동하여 상기 로봇 청소기의 주행을 위한 이동력원을 제공하고, 습식 청소를 위한 클리너가 각각 고정 가능한 제1, 제2, 제3 회전 부재와;
상기 로봇 청소기의 청소 주행 패턴을 결정하고, 상기 결정된 청소 주행 패턴에 따라 제1 측면 방향으로 회전하며 전진 주행하는 제1 주행 단계 및 상기 제1 측면의 반대인 제2 측면 방향으로 회전하며 전진 주행하는 제2 주행 단계를 순차적으로 반복하면서 주행하도록 상기 제1, 제2, 제3 회전 부재의 회전을 제어하는 제어부와;
상기 본체의 일단에 설치되어 청소기 가동시 향기를 외부로 발산하는 향기도포장치와;
청소 로봇의 모션 명령을 입력하는 입력부와;
상기 입력된 모션 명령에 따라 움직이는 상기 청소 로봇의 위치를 측정하는 위치센서와;
상기 좌측 구동모터에 설치되어 상기 청소 로봇의 모션 명령에 의해 생성된 상기 좌측 구동모터의 이동량을 측정하는 제1엔코더와;
상기 우측 구동모터에 설치되어 상기 청소 로봇의 모션 명령에 의해 생성된 상기 우측 구동모터의 이동량을 측정하는 제2엔코더를 더 포함하는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기 제어 방법. - 제 7 항에 있어서,
상기 제어부는,
상기 제1 및 제2엔코더의 측정값에 따라 상기 청소 로봇이 이동한 각도를 계산하고, 상기 위치센서의 센서 정보에 따라 상기 청소 로봇이 이동한 각도를 측정하고, 상기 계산된 상기 청소 로봇의 각도와 상기 측정된 상기 청소 로봇의 각도 차이를 이용하여 상기 청소 로봇의 비직진성을 파악하는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기 제어 방법. - 제 7 항에 있어서,
상기 제어부는,
상기 제1 및 제2엔코더의 측정값에 따라 상기 청소 로봇이 이동한 제1 및 제2엔코더 변화량(A1, A2)을 계산하고, 상기 위치센서의 센서 정보에 따라 상기 청소 로봇이 이동한 위치 변화량(B)을 계산하고, 상기 계산된 제1 및 제2엔코더 변화량(A1, A2)과 상기 계산된 위치센서의 기울기 값의 변화량(B)을 이용하여 청소로봇의 비직진성을 파악하는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기 제어 방법. - 제 7 항에 있어서,
상기 제어부는,
상기 계산된 상기 청소 로봇의 각도와 상기 측정된 상기 청소 로봇의 각도 차이를 일정 시간 동안 검출하여 상기 청소 로봇의 비직선성을 파악하는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기 제어 방법. - 제 7 항에 있어서,
상기 제어부는,
상기 제1 및 제2엔코더의 측정값에 따라 상기 청소 로봇이 제1시간(t1) 동안 이동한 제1 및 제2엔코더 변화량(A1t1, A2t1)을 계산하고, 상기 위치센서의 센서 정보에 따라 상기 청소 로봇이 이동한 위치값의 변화량(B)을 계산하고, 상기 계산된 제1 및 제2엔코더 변화량(A1t1, A2t1)과 상기 계산된 위치값의 변화량(B)을 이용하여 상기 청소 로봇의 비직선성을 파악하는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기 제어 방법. - 제 7 항에 있어서,
상기 제어부는,
상기 청소 로봇이 비직진성이면, 제 3 구동로봇을 시계방향 또는 반시계방향으로 구동하여 직진성을 유도하는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기 제어 방법. - 제 7 항에 있어서,
상기 제어부는,
상기 청소 로봇이 고위험의 상부 '끼임' 상태에서 빠져 나올 수 있도록 상기 구동모터를 후직방향으로 역회전하여 적합한 탈출 정보를 제공하는 것을 특징으로 하는 향 발산기능을 갖는 로봇 청소기 제어 방법.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20190000164 | 2019-01-02 | ||
| KR1020190000164 | 2019-01-02 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200084278A true KR20200084278A (ko) | 2020-07-10 |
| KR102146136B1 KR102146136B1 (ko) | 2020-08-28 |
Family
ID=71604099
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190028505A Expired - Fee Related KR102146136B1 (ko) | 2019-01-02 | 2019-03-13 | 향 발산기능을 갖는 로봇 청소기 및 그의 제어 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102146136B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115736718A (zh) * | 2022-11-30 | 2023-03-07 | 深圳亿嘉和科技研发有限公司 | 机器人的脱困处理方法及机器人 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1057282A (ja) * | 1996-08-27 | 1998-03-03 | Sharp Corp | 電気掃除機 |
| KR20010078935A (ko) * | 2001-05-22 | 2001-08-22 | 조은진 | 향기분사장치를 구비한 이동통신단말기 및 그이동통신단말기의 향기 분사방법 |
| JP2003061882A (ja) * | 2001-08-28 | 2003-03-04 | Matsushita Electric Ind Co Ltd | 自走式掃除機 |
| KR20030066870A (ko) * | 2002-02-05 | 2003-08-14 | 주식회사 동양과학 | 이온수 생성기의 전환 밸브 |
| KR20040010990A (ko) * | 2002-07-25 | 2004-02-05 | 김주하 | 물걸레 청소기 |
| KR100548894B1 (ko) * | 2003-07-29 | 2006-02-02 | 삼성광주전자 주식회사 | 방향기능을 구비한 로봇청소기 |
| KR20060032333A (ko) * | 2004-10-12 | 2006-04-17 | 삼성광주전자 주식회사 | 로봇청소기의 미끄러짐 감지장치 및 이를 이용한 미끄러짐감지방법 |
| US20070186958A1 (en) * | 2006-02-10 | 2007-08-16 | Tennant Company | Method of producing a sparged cleaning liquid onboard a mobile surface cleaner |
| KR20110069965A (ko) * | 2009-12-18 | 2011-06-24 | 엘지전자 주식회사 | 필터장치가 구비된 진공청소기 |
| KR101578887B1 (ko) * | 2014-09-05 | 2015-12-21 | 에브리봇 주식회사 | 습식 청소 장치, 로봇 청소기 및 그의 제어 방법 |
| KR20160015926A (ko) * | 2014-08-01 | 2016-02-15 | 신정호 | 전자기장과 이온수를 이용한 과수성장 관리시스템 |
| CN108185896A (zh) * | 2017-12-21 | 2018-06-22 | 罗积川 | 清洁机及其路径控制方法 |
| KR101982836B1 (ko) * | 2018-04-23 | 2019-07-01 | 주식회사 오이코스 | 약물 도포수단을 갖는 피부 관리장치 |
-
2019
- 2019-03-13 KR KR1020190028505A patent/KR102146136B1/ko not_active Expired - Fee Related
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1057282A (ja) * | 1996-08-27 | 1998-03-03 | Sharp Corp | 電気掃除機 |
| KR20010078935A (ko) * | 2001-05-22 | 2001-08-22 | 조은진 | 향기분사장치를 구비한 이동통신단말기 및 그이동통신단말기의 향기 분사방법 |
| JP2003061882A (ja) * | 2001-08-28 | 2003-03-04 | Matsushita Electric Ind Co Ltd | 自走式掃除機 |
| KR20030066870A (ko) * | 2002-02-05 | 2003-08-14 | 주식회사 동양과학 | 이온수 생성기의 전환 밸브 |
| KR20040010990A (ko) * | 2002-07-25 | 2004-02-05 | 김주하 | 물걸레 청소기 |
| KR100548894B1 (ko) * | 2003-07-29 | 2006-02-02 | 삼성광주전자 주식회사 | 방향기능을 구비한 로봇청소기 |
| KR20060032333A (ko) * | 2004-10-12 | 2006-04-17 | 삼성광주전자 주식회사 | 로봇청소기의 미끄러짐 감지장치 및 이를 이용한 미끄러짐감지방법 |
| US20070186958A1 (en) * | 2006-02-10 | 2007-08-16 | Tennant Company | Method of producing a sparged cleaning liquid onboard a mobile surface cleaner |
| KR20110069965A (ko) * | 2009-12-18 | 2011-06-24 | 엘지전자 주식회사 | 필터장치가 구비된 진공청소기 |
| KR20160015926A (ko) * | 2014-08-01 | 2016-02-15 | 신정호 | 전자기장과 이온수를 이용한 과수성장 관리시스템 |
| KR101578887B1 (ko) * | 2014-09-05 | 2015-12-21 | 에브리봇 주식회사 | 습식 청소 장치, 로봇 청소기 및 그의 제어 방법 |
| CN108185896A (zh) * | 2017-12-21 | 2018-06-22 | 罗积川 | 清洁机及其路径控制方法 |
| KR101982836B1 (ko) * | 2018-04-23 | 2019-07-01 | 주식회사 오이코스 | 약물 도포수단을 갖는 피부 관리장치 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115736718A (zh) * | 2022-11-30 | 2023-03-07 | 深圳亿嘉和科技研发有限公司 | 机器人的脱困处理方法及机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102146136B1 (ko) | 2020-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102146137B1 (ko) | 로봇 청소기 및 그의 제어 방법 | |
| JP7733220B2 (ja) | 洗浄方法、装置、ベースステーションおよび記憶媒体 | |
| US11284756B2 (en) | Window cleaning robot | |
| US10362919B2 (en) | Cleaning robot and method for controlling the same | |
| KR101578887B1 (ko) | 습식 청소 장치, 로봇 청소기 및 그의 제어 방법 | |
| KR101578881B1 (ko) | 로봇 청소기 및 그의 제어 방법 | |
| TWI747403B (zh) | 清掃機器人及具有該清掃機器人的機器人系統 | |
| CN114258278B (zh) | 人工智能机器人清洁器和包括其的机器人系统 | |
| KR101295282B1 (ko) | 창문청소용 로봇청소기와 그 제어방법 | |
| TW202112295A (zh) | 清掃機器人及其控制方法 | |
| KR20150126210A (ko) | 로봇 청소기 및 그 제어 방법 | |
| CN107249418A (zh) | 清洁机器人及其控制方法 | |
| CN110507253A (zh) | 一种清洁机器人及其控制方法 | |
| JP2023552483A (ja) | 洗浄制御方法および装置、コンピュータ可読記憶媒体、ならびに電子機器 | |
| GB2560366A (en) | Improvements relating to robotic cleaning systems and robots therefor | |
| KR102146135B1 (ko) | 에러 경보기능을 갖는 로봇 청소기 | |
| JP2026509553A (ja) | 清掃ロボットシステム | |
| KR20200084278A (ko) | 향 발산기능을 갖는 로봇 청소기 및 그의 제어 방법 | |
| CN109419455A (zh) | 具有电机驱动的地面处理元件的地面处理设备 | |
| KR101622737B1 (ko) | 로봇 청소기 및 그의 제어 방법 | |
| KR101294820B1 (ko) | 창문청소용 로봇청소기와 그 제어방법 | |
| KR100876691B1 (ko) | 청소기의 충전 시스템 및 그 제어방법 | |
| KR20130019703A (ko) | 창문청소용 로봇청소기와 그 제어방법 | |
| KR20120078916A (ko) | 로봇 청소기 | |
| CN115067802A (zh) | 自移动设备、系统、模块及控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20230813 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20230813 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |