KR20200084609A - 차량용 회전시트 및 그 제어방법 - Google Patents
차량용 회전시트 및 그 제어방법 Download PDFInfo
- Publication number
- KR20200084609A KR20200084609A KR1020190000705A KR20190000705A KR20200084609A KR 20200084609 A KR20200084609 A KR 20200084609A KR 1020190000705 A KR1020190000705 A KR 1020190000705A KR 20190000705 A KR20190000705 A KR 20190000705A KR 20200084609 A KR20200084609 A KR 20200084609A
- Authority
- KR
- South Korea
- Prior art keywords
- seat
- rotating
- vehicle
- controller
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000000034 method Methods 0.000 title claims description 44
- 238000013016 damping Methods 0.000 claims description 59
- 239000002184 metal Substances 0.000 claims description 46
- 238000001514 detection method Methods 0.000 claims description 30
- 230000008859 change Effects 0.000 claims description 15
- 230000001133 acceleration Effects 0.000 claims description 12
- 238000004891 communication Methods 0.000 claims description 9
- 230000007423 decrease Effects 0.000 claims description 6
- 230000000452 restraining effect Effects 0.000 claims description 5
- 230000002996 emotional effect Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 230000005684 electric field Effects 0.000 description 5
- 238000003745 diagnosis Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000005674 electromagnetic induction Effects 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 210000003195 fascia Anatomy 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000010985 leather Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/04—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable
- B60N2/14—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable rotatable, e.g. to permit easy access
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/0224—Non-manual adjustments, e.g. with electrical operation
- B60N2/02246—Electric motors therefor
-
- B60N2/0232—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/0224—Non-manual adjustments, e.g. with electrical operation
- B60N2/0244—Non-manual adjustments, e.g. with electrical operation with logic circuits
- B60N2/0268—Non-manual adjustments, e.g. with electrical operation with logic circuits using sensors or detectors for adapting the seat or seat part, e.g. to the position of an occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/0224—Non-manual adjustments, e.g. with electrical operation
- B60N2/0244—Non-manual adjustments, e.g. with electrical operation with logic circuits
- B60N2/0272—Non-manual adjustments, e.g. with electrical operation with logic circuits using sensors or detectors for detecting the position of seat parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/04—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable
- B60N2/12—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable slidable and tiltable
-
- B60N2002/0268—
-
- B60N2002/0272—
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Seats For Vehicles (AREA)
Abstract
Description
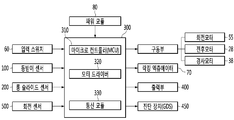
도 2는 본 발명의 실시예에 따른 차량용 회전시트의 제어 구성을 보여주는 블록도
도 3은 본 발명의 실시예에 따른 등받이센서의 구성 및 감지 원리를 보여주는 도면
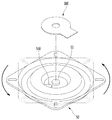
도 4는 본 발명의 실시예에 따른 회전판 및 회전센서의 연결관계를 보여주는 도면
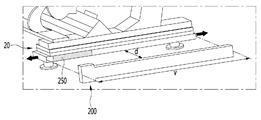
도 5는 본 발명의 실시예에 따른 이동레일 및 롱슬라이드센서의 연결관계를 보여주는 도면
도 6은 본 발명의 실시예에 따른 차량용 회전시트의 회전을 위한 제어방법을 보여주는 플로우 차트
도 7은 도 6의 초기조건확인(S10) 단계의 상세한 제어방법을 보여주는 플로우 차트
도 8은 도 6의 로테이션(S20) 단계의 상세한 제어방법을 보여주는 플로우 차트
도 9는 도 8의 회전가능포지션 판단(S100) 단계의 상세한 제어방법을 보여주는 플로우 차트
도 10은 도 8의 제어기 안전모드 실행(S200) 단계의 상세한 제어방법을 보여주는 플로우 차트
도 11은 본 발명의 실시예에 따른 댐핑(damping)제어를 보여주는 타이밍(timing) 차트
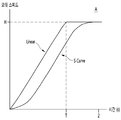
도 12는 도 11의 댐핑스타트구간(A)에서 시간 대비 모터 스피드(speed)를 비교해주는 그래프
30 : 시트 50 : 회전판
100: 등받이센서 200: 롱슬라이드센서
500: 회전센서
Claims (20)
- 사용자가 앉을 수 있는 시트, 상기 시트를 틸팅시킬 수 있는 틸팅축, 상기 시트를 전후 방향으로 이동시킬 수 있는 이동레일 및 상기 시트를 회전시킬 수 있는 회전판을 포함하는 차량용 회전시트에 있어서,
상기 틸팅축에 설치되어 상기 시트의 틸팅각도를 감지할 수 있는 등받이센서;
상기 이동레일에 설치되어 상기 시트의 전후 이동위치를 감지할 수 있는 롱슬라이드센서;
상기 회전판에 설치되어 상기 시트의 회전각도를 감지할 수 있는 회전센서; 및
상기 시트의 회전 동작을 제어하는 제어기를 포함하며,
상기 제어기는,
상기 등받이센서 및 상기 롱슬라이드센서로부터 감지되는 정보를 기초로 상기 시트가 회전가능포지션에 위치하는지 판단하고,
상기 회전가능포지션에 상기 시트가 위치하는 경우, 상기 회전판이 회전되도록 제어하는 것을 특징으로 하는 차량용 회전시트.
- 제 1 항에 있어서,
상기 등받이센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 틸팅축에 결합되는 타겟금속을 더 포함하며,
상기 등받이센서는 상기 틸팅축과 함께 회전하는 상기 타겟금속에 의하여 상기 시트의 틸팅각도를 감지하는 것을 특징으로 하는 차량용 회전시트.
- 제 1 항에 있어서,
상기 롱슬라이드센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 이동레일에 결합되는 레일타켓금속을 더 포함하며,
상기 롱슬라이드센서는 상기 이동레일과 함께 전후로 이동하는 상기 레일타겟금속에 의하여 상기 시트의 전후 이동위치를 감지하는 것을 특징으로 하는 차량용 회전시트.
- 제 1 항에 있어서,
상기 회전판의 중심에 구비되며, 상기 회전판의 회전에 독립적으로 고정된 위치를 유지하는 회전축; 및
상기 회전센서로부터 미리 설정된 거리(d)만큼 이격되도록 상기 회전판에 결합되는 회전타겟금속을 더 포함하며,
상기 회전센서는 상기 회전축에 결합되며, 상기 회전판과 함께 회전하는 상기 회전타겟금속에 의하여 상기 시트의 회전각도를 감지하는 것을 특징으로 하는 차량용 회전시트.
- 제 1 항에 있어서,
상기 회전판에 연결되어 상기 회전판이 회전하도록 구동력을 제공하는 회전모터를 더 포함하며,
상기 제어기는,
상기 회전모터의 출력이 상승 또는 하강하는 구간에서 가속도가 가변되도록 제어하는 것을 특징으로 하는 차량용 회전시트.
- 제 5 항에 있어서,
상기 회전모터는 브러시리스(BLDC)모터를 포함하는 차량용 회전시트.
- 제 5 항에 있어서,
상기 제어기는,
상기 회전센서로부터 감지되는 회전각도를 기초로 상기 회전모터의 출력을 제어하는 것을 특징으로 하는 차량용 회전시트.
- 제 1 항에 있어서,
상기 제어기는,
상기 시트가 상기 회전가능포지션을 벗어난 경우, 상기 시트를 상기 회전가능포지션으로 이동시키기 위해 상기 이동레일에 설치되는 전후모터 및 상기 틸팅축에 설치되는 경사모터를 제어하는 것을 특징으로 하는 차량용 회전시트.
- 제 1 항에 있어서,
차량에 설치되는 다수의 센서로부터 감지된 정보를 기초로 차량의 상태를 관리하기 위한 진단장치를 더 포함하며,
상기 다수의 센서는, 도어감지센서, 파킹감지센서 및 속도감지센서 중 적어도 어느 하나를 포함하는 차량용 회전시트.
- 제 9 항에 있어서,
상기 제어기는, 상기 진단장치와 정보를 송수신 할 수 있는 통신모듈을 포함하는 차량용 회전시트.
- 차량의 내부에 설치된 시트를 회전시키기 위한 초기조건을 확인하는 단계;
상기 시트의 틸팅각도를 감지하는 등받이센서와 상기 시트의 전후 이동위치를 감지하는 롱슬라이드센서에 의해 감지된 정보를 기초로 상기 시트가 회전가능포지션에 위치하는지 판단하는 단계;
상기 시트의 회전을 제어하는 제어기의 상태를 감지하는 제어기 안전모드 실행단계;
상기 시트에 구비되는 회전판의 구속이 해제되는 단계;
상기 회전판에 연결된 회전모터가 작동되는 단계;
상기 회전모터의 작동에 따른 상기 시트의 회전 각도에 따라, 상기 회전모터의 출력을 펄스 폭 변조(PWM)로 제어하는 댐핑제어가 수행되는 단계; 및
상기 시트의 회전완료 여부를 판단하고, 상기 회전판을 다시 구속시키는 단계를 포함하는 차량용 회전시트의 제어방법.
- 제 11 항에 있어서,
상기 댐핑제어는,
상기 회전모터의 출력이 0V로부터 미리 설정된 최대출력까지 상승하는 댐핑스타트구간 및
상기 회전모터의 출력이 상기 미리 설정된 최대출력으로부터 OV까지 하강하는 댐핑스톱구간에서 수행되는 것을 특징으로 하는 차량용 회전시트의 제어방법.
- 제 12 항에 있어서,
상기 제어기는,
상기 댐핑스타트구간 및 상기 댐핑스톱구간에서 듀티비(duty ratio)를 가변하도록 상기 펄스 폭 변조(PWM)제어를 수행하는 것을 특징으로 하는 차량용 회전시트의 제어방법.
- 제 13 항에 있어서,
상기 제어기는,
상기 댐핑스타트구간에서 상기 듀티비가 시간의 경과에 따라 점차 커지도록 제어하고,
상기 댐핑스톱구간에서 상기 듀티비가 시간의 경과에 따라 점차 작아지도록 제어하는 것을 특징으로 하는 차량용 회전시트의 제어방법.
- 제 12 항에 있어서,
상기 제어기는,
상기 댐핑스타트구간 및 상기 댐핑스톱구간에서 상기 회전모터의 회전 가속도를 가변시키는 것을 특징으로 하는 차량용 회전시트의 제어방법.
- 제 11 항에 있어서,
상기 회전가능포지션에 위치하는지 판단하는 단계는,
상기 등받이센서로부터 상기 시트의 현 틸팅각도를 감지하는 단계;
상기 롱슬라이드센서로부터 상기 시트의 현 이동위치를 감지하는 단계; 및
상기 제어기가 상기 현 틸팅각도 및 상기 현 이동위치가 미리 설정된 범위를 만족하는지 판단하는 단계를 포함하는 차량용 회전시트의 제어방법.
- 제 15 항에 있어서,
상기 제어기는,
상기 현 틸팅각도 및 상기 현 이동위치가 미리 설정된 범위를 벗어난 경우, 상기 미리 설정된 범위를 만족하도록 상기 시트를 회동 또는 이동시키는 것을 특징으로 하는 차량용 회전시트의 제어방법.
- 제 11 항에 있어서,
상기 제어기 안전모드 실행단계는,
상기 제어기의 입력전류 및 상기 시트의 회전속도 변화율이 미리 설정된 안전조건을 만족하는지 판단하는 단계; 및
상기 회전모터의 과전류를 감지하기 위한 스톨조건 감지단계를 포함하며,
상기 제어기는, 상기 스톨조건이 감지되면 상기 회전모터를 정지시키는 것을 특징으로 하는 차량용 회전시트의 제어방법.
- 제 18 항에 있어서,
상기 제어기는,
상기 안전조건을 만족하지 못하거나 상기 스톨조건이 감지된 경우, 출력부로 안내가 출력되도록 제어하며, 차량 진단장치에 관련 정보를 전송하는 것을 특징으로 하는 차량용 회전시트의 제어방법.
- 제 11 항에 있어서,
상기 초기조건을 확인하는 단계는,
차량의 도어 오픈 여부를 감지하는 도어감지센서, 차량의 주차여부를 감지하는 파킹감지센서 및 차량의 정차여부를 감지하는 속도감지센서 중 적어도 어느 하나의 센서로부터 감지된 정보를 기초로 판단하는 것을 특징으로 하는 차량용 회전시트의 제어방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190000705A KR20200084609A (ko) | 2019-01-03 | 2019-01-03 | 차량용 회전시트 및 그 제어방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190000705A KR20200084609A (ko) | 2019-01-03 | 2019-01-03 | 차량용 회전시트 및 그 제어방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200084609A true KR20200084609A (ko) | 2020-07-13 |
Family
ID=71570710
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190000705A Ceased KR20200084609A (ko) | 2019-01-03 | 2019-01-03 | 차량용 회전시트 및 그 제어방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200084609A (ko) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210276575A1 (en) * | 2020-03-04 | 2021-09-09 | Ford Global Technologies, Llc | Vehicle component identification system |
| CN113968175A (zh) * | 2021-10-28 | 2022-01-25 | 长春富维安道拓汽车饰件系统有限公司 | 一种用于汽车旋转座椅的双电机控制方法及系统 |
| KR20220095907A (ko) * | 2020-12-30 | 2022-07-07 | 대원산업 주식회사 | 차량 시트의 파워 스위블 제어 방법 및 차량 시트의 파워 스위블 장치 |
| CN114940106A (zh) * | 2022-06-15 | 2022-08-26 | 大陆汽车研发(重庆)有限公司 | 车辆座椅的防夹方法、装置、设备和存储介质 |
| KR20230032163A (ko) * | 2021-08-30 | 2023-03-07 | 한국로봇융합연구원 | 자율주행차의 스위블 시트 테스트 베드 |
| KR102586495B1 (ko) * | 2022-12-23 | 2023-10-11 | 주식회사 금창 | 자동 회전 시트 및 그 제어 방법 |
| KR20240034101A (ko) * | 2022-09-06 | 2024-03-13 | 에스앤티모티브 주식회사 | 차량용 사이드스텝장치의 제어방법 |
| KR20240154355A (ko) * | 2023-04-18 | 2024-10-25 | 대원산업 주식회사 | 스위블 코어의 회전 각도 감지 시스템 및 방법 |
| WO2025016378A1 (zh) * | 2023-07-17 | 2025-01-23 | 浙江极氪智能科技有限公司 | 车辆座椅系统及车辆 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101826513B1 (ko) | 2016-07-29 | 2018-02-07 | 주식회사 서연이화 | 차량용 전동식 시트 회전장치 |
-
2019
- 2019-01-03 KR KR1020190000705A patent/KR20200084609A/ko not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101826513B1 (ko) | 2016-07-29 | 2018-02-07 | 주식회사 서연이화 | 차량용 전동식 시트 회전장치 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210276575A1 (en) * | 2020-03-04 | 2021-09-09 | Ford Global Technologies, Llc | Vehicle component identification system |
| US12325431B2 (en) * | 2020-03-04 | 2025-06-10 | Ford Global Technologies, Llc | Vehicle component identification system |
| KR20220095907A (ko) * | 2020-12-30 | 2022-07-07 | 대원산업 주식회사 | 차량 시트의 파워 스위블 제어 방법 및 차량 시트의 파워 스위블 장치 |
| KR20230032163A (ko) * | 2021-08-30 | 2023-03-07 | 한국로봇융합연구원 | 자율주행차의 스위블 시트 테스트 베드 |
| CN113968175A (zh) * | 2021-10-28 | 2022-01-25 | 长春富维安道拓汽车饰件系统有限公司 | 一种用于汽车旋转座椅的双电机控制方法及系统 |
| CN114940106A (zh) * | 2022-06-15 | 2022-08-26 | 大陆汽车研发(重庆)有限公司 | 车辆座椅的防夹方法、装置、设备和存储介质 |
| CN114940106B (zh) * | 2022-06-15 | 2023-11-24 | 大陆汽车研发(重庆)有限公司 | 车辆座椅的防夹方法、装置、设备和存储介质 |
| KR20240034101A (ko) * | 2022-09-06 | 2024-03-13 | 에스앤티모티브 주식회사 | 차량용 사이드스텝장치의 제어방법 |
| KR102586495B1 (ko) * | 2022-12-23 | 2023-10-11 | 주식회사 금창 | 자동 회전 시트 및 그 제어 방법 |
| KR20240154355A (ko) * | 2023-04-18 | 2024-10-25 | 대원산업 주식회사 | 스위블 코어의 회전 각도 감지 시스템 및 방법 |
| WO2025016378A1 (zh) * | 2023-07-17 | 2025-01-23 | 浙江极氪智能科技有限公司 | 车辆座椅系统及车辆 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200084609A (ko) | 차량용 회전시트 및 그 제어방법 | |
| KR101393916B1 (ko) | 차량의 도어 스텝장치 | |
| JP4985164B2 (ja) | 駐車支援装置および駐車支援装置用のプログラム | |
| CN102951042A (zh) | 使用单个霍尔传感器控制车座位置的方法 | |
| US20220144146A1 (en) | Vehicular system capable of adjusting a passenger compartment from a first arrangement to a child care arrangement | |
| EP2716491B1 (en) | Vehicle seat device | |
| CN117881569A (zh) | 用于调节内部空间组件的驱动设备 | |
| JP4134197B2 (ja) | 車両用開閉体の制御システム | |
| CN118790120B (zh) | 汽车座椅控制方法、车载控制器、汽车座椅及汽车 | |
| JP2014159220A (ja) | シート装置及び車両用シート装置 | |
| JP7565825B2 (ja) | シート制御装置 | |
| KR20150001042A (ko) | 탑승자 승하차 편의를 위한 차량 시트 위치 조절 장치 및 그 방법 | |
| US7276872B2 (en) | Power window device | |
| CN115871526B (zh) | 汽车座椅调整方法及汽车座椅调整系统 | |
| JP4480596B2 (ja) | 車両におけるヘッドレスト制御装置 | |
| JP2013244914A (ja) | シート位置制御装置 | |
| JP4675621B2 (ja) | ヘッドレスト制御装置 | |
| EP4067163A1 (en) | Power swivel apparatus and power swivel control method using same | |
| JPS6226136A (ja) | 車両用シ−ト調整装置 | |
| JP2000326773A (ja) | 車両用回転座席の駆動装置 | |
| KR100956199B1 (ko) | 차량용 도어체커의 개폐각 제어장치 및 제어방법 | |
| JP5297051B2 (ja) | 車両用シート装置および車両用シート装置の制御方法 | |
| JP7674998B2 (ja) | パワーシート制御装置及びパワーシート | |
| JP4186207B2 (ja) | 車両のスライドドア制御装置 | |
| JPS61207237A (ja) | 回転式車両用シ−ト |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190103 |
|
| PA0201 | Request for examination | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200331 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20200701 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20200331 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| PG1501 | Laying open of application |