KR20200095192A - 회전 고정 장치 및 이를 포함하는 2 자유도 회전 암 - Google Patents
회전 고정 장치 및 이를 포함하는 2 자유도 회전 암 Download PDFInfo
- Publication number
- KR20200095192A KR20200095192A KR1020190012992A KR20190012992A KR20200095192A KR 20200095192 A KR20200095192 A KR 20200095192A KR 1020190012992 A KR1020190012992 A KR 1020190012992A KR 20190012992 A KR20190012992 A KR 20190012992A KR 20200095192 A KR20200095192 A KR 20200095192A
- Authority
- KR
- South Korea
- Prior art keywords
- rotation
- link
- friction
- rotation axis
- connector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/04—Arms extensible rotatable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/02—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0004—Braking devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/1005—Program-controlled manipulators characterised by positioning means for manipulator elements comprising adjusting means
- B25J9/101—Program-controlled manipulators characterised by positioning means for manipulator elements comprising adjusting means using limit-switches, -stops
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Pivots And Pivotal Connections (AREA)
Abstract
Description
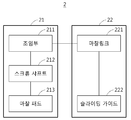
도 2는 일 실시 예에 따른 회전 고정 장치의 블록도이다.
도 3은 일 실시 예에 따른 2 자유도 회전 암의 분해 사시도이다.
도 4는 일 실시 예에 따른 회전 고정 장치가 고정 해제된 상태에 있는 2 자유도 회전 암의 단면도이다.
도 5는 일 실시 예에 따른 회전 고정 장치가 고정된 상태에 있는 2 자유도 회전 암의 단면도이다.
Claims (10)
- 베이스부;
상기 베이스부에 대해 제 1 회전 축을 기준으로 회전 가능하게 연결되는 제 1 회전 링크;
상기 제 1 회전 링크에 대해 제 2 회전 축을 기준으로 회전 가능하게 연결되는 제 2 회전 링크;
상기 베이스부 및 제 1 회전 링크 사이에 마찰력을 제공하도록 작동하여 상기 베이스부 및 제 1 회전 링크 사이의 회전을 고정하는 제 1 회전 고정부; 및
상기 제 1 회전 고정부가 작동함에 따라 상기 제 1 회전 링크 및 제 2 회전 링크 사이에 마찰력을 제공하도록 작동하여 상기 제 1 회전 링크 및 제 2 회전 링크 사이의 회전을 고정하는 제 2 회전 고정부를 포함하는 2 자유도 회전 암.
- 제 1 항에 있어서,
상기 베이스부는, 상기 제 1 회전 축을 따라서 관통 형성되는 제 1 조인트 홀을 포함하고,
상기 제 1 회전 링크는, 제 1 조인트 홀에 연결되는 제 1 연결체와, 상기 제 1 연결체에 고정되어 회전하는 제 1 링크 부재와, 상기 제 1 링크 부재에 상기 제 2 회전 축을 따라서 관통 형성되는 제 2 조인트 홀을 포함하고,
상기 제 2 회전 링크는, 상기 제 2 조인트 홀에 연결되는 제 2 연결체와, 상기 제 2 연결체에 고정되어 회전하는 제 2 링크 부재를 포함하고,
상기 제 1 회전 고정부는, 상기 베이스부에 대해 상기 제 1 연결체를 가압함으로써 상기 베이스부 및 상기 제 1 회전 링크 사이의 회전을 고정하고,
상기 제 2 회전 고정부는, 상기 제 1 회전 링크에 대해 상기 제 2 연결체를 가압함으로써 상기 제 1 회전 링크 및 제 2 회전 링크 사이의 회전을 고정하는 것을 특징으로 하는 2 자유도 회전 암.
- 제 2 항에 있어서,
제 1 회전 고정부는,
상기 제 1 조인트 홀 및 제 1 연결체를 상기 제 1 회전 축을 따라 통과하고 외주면의 일부에 나사산이 형성되어 있는 스크류 샤프트;
상기 스크류 샤프트의 일측에 나사 결합되어 상기 제 1 회전 축을 따라서 상기 제 1 연결체에 대하여 상대적으로 이동하는 조임부; 및
상기 스크류 샤프트의 타측에 설치되어 상기 제 1 연결체의 단부 표면에 접촉 가능한 마찰 패드를 포함하고,
상기 제 2 회전 고정부는,
상기 조임부의 이동에 따라 간섭되어 상기 제 2 회전 축에 수직한 방향을 따라서 상기 제 1 링크 부재에 대하여 상대적으로 이동함으로써 상기 제 2 연결체의 외면에 접촉 가능한 마찰 링크를 포함하는 2 자유도 회전 암.
- 제 3 항에 있어서,
상기 마찰 패드는,
상기 베이스부에 대하여, 상기 제 1 회전 축과 평행한 방향으로 슬라이딩 가능하면서, 상기 제 1 회전 축을 중심으로 회전 불가능하게 설치되는 것을 특징으로 하는 2 자유도 회전 암.
- 제 3 항에 있어서,
상기 조임부는,
상기 스크류 샤프트와 나사 결합되는 노브;
상기 노브가 조여짐에 따라 상기 제 1 회전 축을 따라 이동하여 상기 마찰 링크를 간섭하여, 상기 마찰 링크가 상기 제 1 회전 축에 수직한 방향으로 이동되게 하는 가압 부재; 및
상기 가압 부재가 상기 제 1 연결체로부터 멀어지는 방향으로 탄성력을 인가하는 제 1 탄성체를 포함하는 2 자유도 회전 암.
- 제 5 항에 있어서,
상기 가압 부재는, 상기 마찰 링크와 접촉하는 부분이 상기 제 1 회전 축에 대하여 경사진 형상을 갖는 제 1 접촉부를 포함하고,
상기 마찰 링크는, 상기 제 1 접촉부와 접촉 가능하고 상기 제 1 회전 축에 대하여 경사진 형상을 갖는 제 2 접촉부를 포함하는 2 자유도 회전 암.
- 제 2 항에 있어서,
상기 마찰 링크는, 상기 제 2 연결체의 외면의 표면과 면 접촉하도록 굴곡진 형상의 표면을 갖는 마찰 단부를 포함하는 2 자유도 회전 암.
- 제 7 항에 있어서,
상기 마찰 링크는, 상기 마찰 단부가 상기 제 2 연결체로부터 멀어지는 방향으로 탄성력을 인가하는 제 2 탄성체를 더 포함하는 2 자유도 회전 암.
- 제 8 항에 있어서,
상기 제 2 탄성체는 플런저인 것을 특징으로 하는 2 자유도 회전 암.
- 제 1 항에 있어서,
상기 제 1 회전 고정부의 동작 여부에 무관하게, 상기 제 1 회전 링크가 상기 베이스부에 대하여 상기 제 1 회전 축을 따라서 병진 이동되는 것을 방지하기 위한 제 1 지지 구조; 및
상기 제 2 회전 고정부의 동작 여부에 무관하게, 상기 제 2 회전 링크가 상기 제 1 회전 링크에 대하여 상기 제 2 회전 축을 따라서 병진 이동되는 것을 방지하기 위한 제 2 지지 구조를 더 포함하는 2 자유도 회전 암.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190012992A KR102188407B1 (ko) | 2019-01-31 | 2019-01-31 | 회전 고정 장치 및 이를 포함하는 2 자유도 회전 암 |
| PCT/KR2019/009250 WO2020159020A1 (en) | 2019-01-31 | 2019-07-25 | Rotation locking device and two-degree-of-freedom (2dof) rotary arm including same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190012992A KR102188407B1 (ko) | 2019-01-31 | 2019-01-31 | 회전 고정 장치 및 이를 포함하는 2 자유도 회전 암 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200095192A true KR20200095192A (ko) | 2020-08-10 |
| KR102188407B1 KR102188407B1 (ko) | 2020-12-08 |
Family
ID=71842250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190012992A Active KR102188407B1 (ko) | 2019-01-31 | 2019-01-31 | 회전 고정 장치 및 이를 포함하는 2 자유도 회전 암 |
Country Status (2)
| Country | Link |
|---|---|
| KR (1) | KR102188407B1 (ko) |
| WO (1) | WO2020159020A1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230064214A (ko) * | 2021-11-03 | 2023-05-10 | 한국과학기술원 | 단일 고정장치에 의해 위치가 고정될 수 있는 스카라 로봇 암 |
| WO2023080651A1 (ko) * | 2021-11-03 | 2023-05-11 | 주식회사 로엔서지컬 | 단일 고정장치에 의해 위치가 고정될 수 있는 포지셔닝 암 |
| KR20240062809A (ko) * | 2022-11-02 | 2024-05-09 | 한국과학기술원 | 단일 고정장치에 의해 위치가 고정될 수 있는 포지셔닝 암 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4217085A4 (en) * | 2020-09-25 | 2024-10-16 | Virtuix Holdings Inc. | OMNIDIRECTIONAL LIFTING SYSTEM WITH FULL RANGE OF MOTION IN MULTIPLE DEGREES OF FREEDOM FOR WALKABLE OR INTERACTIVE VIRTUAL REALITY |
| CN114484176A (zh) * | 2022-01-28 | 2022-05-13 | 武汉大学 | 一种多自由度传感器安装支架 |
| CN218762382U (zh) * | 2022-12-23 | 2023-03-28 | 武汉联影医疗科技有限公司 | 旋转锁止机构及医疗设备 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009147832A1 (ja) * | 2008-06-06 | 2009-12-10 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| KR101117458B1 (ko) * | 2010-07-27 | 2012-02-29 | 김동철 | 의료장치에 구비되는 로봇암의 관절고정장치 |
| JP2016187858A (ja) * | 2015-03-30 | 2016-11-04 | 川崎重工業株式会社 | ロボットアーム固定装置およびロボット |
| CN107013793A (zh) * | 2017-05-15 | 2017-08-04 | 宁波市镇海文鑫视听器材有限公司 | 一种多臂组合万向支架 |
| KR20180060264A (ko) * | 2016-11-28 | 2018-06-07 | 한국전기연구원 | 다관절 로봇의 스토퍼장치 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101013792B1 (ko) * | 2008-09-18 | 2011-02-14 | 주식회사 로보테크 | 로봇 상부아암의 2자유도 구동장치 |
| FR2950831B1 (fr) * | 2009-10-05 | 2012-08-10 | Commissariat Energie Atomique | Articulation motorisee pour bras de robot |
| JP2016107382A (ja) * | 2014-12-09 | 2016-06-20 | 株式会社安川電機 | ロボット |
| KR101903904B1 (ko) * | 2017-02-23 | 2018-11-13 | 고려대학교 산학협력단 | 중력보상에 기반한 수동식 자세유지장치 |
-
2019
- 2019-01-31 KR KR1020190012992A patent/KR102188407B1/ko active Active
- 2019-07-25 WO PCT/KR2019/009250 patent/WO2020159020A1/en not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009147832A1 (ja) * | 2008-06-06 | 2009-12-10 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| KR101117458B1 (ko) * | 2010-07-27 | 2012-02-29 | 김동철 | 의료장치에 구비되는 로봇암의 관절고정장치 |
| JP2016187858A (ja) * | 2015-03-30 | 2016-11-04 | 川崎重工業株式会社 | ロボットアーム固定装置およびロボット |
| KR20180060264A (ko) * | 2016-11-28 | 2018-06-07 | 한국전기연구원 | 다관절 로봇의 스토퍼장치 |
| CN107013793A (zh) * | 2017-05-15 | 2017-08-04 | 宁波市镇海文鑫视听器材有限公司 | 一种多臂组合万向支架 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230064214A (ko) * | 2021-11-03 | 2023-05-10 | 한국과학기술원 | 단일 고정장치에 의해 위치가 고정될 수 있는 스카라 로봇 암 |
| WO2023080651A1 (ko) * | 2021-11-03 | 2023-05-11 | 주식회사 로엔서지컬 | 단일 고정장치에 의해 위치가 고정될 수 있는 포지셔닝 암 |
| KR20230085117A (ko) * | 2021-11-03 | 2023-06-13 | 한국과학기술원 | 스카라 로봇 암 |
| KR20240062809A (ko) * | 2022-11-02 | 2024-05-09 | 한국과학기술원 | 단일 고정장치에 의해 위치가 고정될 수 있는 포지셔닝 암 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102188407B1 (ko) | 2020-12-08 |
| WO2020159020A1 (en) | 2020-08-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102188407B1 (ko) | 회전 고정 장치 및 이를 포함하는 2 자유도 회전 암 | |
| US10881903B2 (en) | Hand grip | |
| US10849815B2 (en) | Wearable hand rehabilitation system | |
| US10279484B2 (en) | Mechanical finger for grasping apparatus | |
| KR101903904B1 (ko) | 중력보상에 기반한 수동식 자세유지장치 | |
| US10927931B2 (en) | Robot and arm assembly thereof | |
| KR101608516B1 (ko) | 그립퍼 | |
| EP2743042A2 (en) | Apparatus for fixing a joint structure | |
| CN107613902B (zh) | 可调节支撑臂 | |
| HUT69237A (en) | Clamp with screw | |
| JP2016153161A (ja) | 把持ヘッド | |
| JPH0414981B2 (ko) | ||
| US20120090169A1 (en) | Coaxial cable connector compression tool and method of use thereof | |
| KR20090064283A (ko) | 클램프 장치 | |
| US10259126B1 (en) | Modular cable strain relief device for articulated arm robotic systems | |
| KR20190128872A (ko) | 개방 각도를 설정할 수 있는 도어 힌지용 스토퍼 | |
| US11605927B2 (en) | Crimping handtool | |
| US20160302810A1 (en) | Surgical Tool | |
| JP6953007B2 (ja) | 回動角度調整機構及び義手 | |
| JP2015186396A (ja) | ケーブル曲げ装置 | |
| JP7577384B2 (ja) | コネクティングロッドコンポーネント、ダブルコネクティングロッド固定装置及び手術ヘッドレスト | |
| KR101279916B1 (ko) | 각도 제어가 가능한 복강경 수술용 수술 도구 및 그 제어방법 | |
| US12053335B2 (en) | Holding device | |
| TW202332541A (zh) | 具有旋轉進給裝置的夾具 | |
| KR101259387B1 (ko) | 토크 인가 및 해제 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| P14-X000 | Amendment of ip right document requested |
St.27 status event code: A-5-5-P10-P14-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| R18 | Changes to party contact information recorded |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R18-OTH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 6 |