RU2190382C2 - Механизм против опрокидывания для транспортного средства - Google Patents
Механизм против опрокидывания для транспортного средства Download PDFInfo
- Publication number
- RU2190382C2 RU2190382C2 RU99103214/14A RU99103214A RU2190382C2 RU 2190382 C2 RU2190382 C2 RU 2190382C2 RU 99103214/14 A RU99103214/14 A RU 99103214/14A RU 99103214 A RU99103214 A RU 99103214A RU 2190382 C2 RU2190382 C2 RU 2190382C2
- Authority
- RU
- Russia
- Prior art keywords
- vehicle
- ground
- tipping
- wheel
- contact
- Prior art date
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/06—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs with obstacle mounting facilities, e.g. for climbing stairs, kerbs or steps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/1089—Anti-tip devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K11/00—Motorcycles, engine-assisted cycles or motor scooters with one or two wheels
- B62K11/007—Automatic balancing machines with single main ground engaging wheel or coaxial wheels supporting a rider
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/30—General characteristics of devices characterised by sensor means
- A61G2203/36—General characteristics of devices characterised by sensor means for motion
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
- Handcart (AREA)
- Dental Tools And Instruments Or Auxiliary Dental Instruments (AREA)
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Body Structure For Vehicles (AREA)
- Details Of Aerials (AREA)
- Steroid Compounds (AREA)
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
- Toys (AREA)
- Automatic Cycles, And Cycles In General (AREA)
- Vending Machines For Individual Products (AREA)
- Constitution Of High-Frequency Heating (AREA)
- Centrifugal Separators (AREA)
Abstract
Изобретение относится к раздвижному механизму против опрокидывания и непосредственно к раздвижному механизму против опрокидывания для предотвращения падения транспортного средства типа инвалидной коляски. Механизм имеет точку контакта с землей и центр масс, включающий стойку. Стойка установлена с возможностью ее движения вокруг оси от убранного положения до развернутого положения. На конце стойки установлено колесо. Для вращения стойки от убранного положения до развернутого положения имеется исполнительный механизм, а для выявления момента центра масс непосредственно перед контактом с землей - воспринимающий элемент. С воспринимающим элементом связан регулятор для приведения исполнительного механизма. В результате механизм против опрокидывания представляет возможность раздвинуть колесо для того, чтобы сдержать опрокидывание транспортного средства, при этом он не ограничивает маневренность транспортного средства. 4 з.п.ф-лы, 8 ил.
Description
Изобретение относится к раздвижному механизму против опрокидывания и, непосредственно, к раздвижному механизму против опрокидывания для предотвращения падения транспортного средства типа инвалидной коляски.
Транспортные средства как для перевозки людей, так и чего-либо другого, могут иметь недостаточную устойчивость как благодаря конструкции, где присущая устойчивость приносится в жертву для того, чтобы получить сравнительную мобильность, так и благодаря характеру их использования. Многие такие транспортные средства особенно чувствительны к опрокидыванию как из-за столкновения, механической неисправности, внезапных поворотов, крутых наклонов, так и из-за неожиданного наезда на неровности поверхности, которые механизм не в состоянии компенсировать. Конечно, любое индивидуальное транспортное средство может перевернуться, когда неожиданно натолкнется на достаточно грубые неровности на поверхности. При данных обстоятельствах пассажир или содержимое транспортного средства должны быть защищены таким образом, чтобы повреждение не было нанесено в результате продвижения пассажира к земле или к какому-либо другому твердому телу. До тех пор, пока он не защищен, пассажир может получить увечье благодаря травме или раздавливанию, если транспортное средство, которое может быть сравнительно массивным, упадет или будет продвинуто вперед за счет своей инерции на твердый предмет или сверху на пассажира. Для защиты пассажира транспортного средства от повреждений и транспортного средства от порчи это транспортное средство должно быть удержано от опрокидывания.
Способ, который использовался в кресле на колесах с целью предотвратить опрокидывание при условиях внезапной остановки или внезапного ускорения, предполагает размещение ролика или колеса впереди передней оси или позади задней оси. Цель зафиксированного ролика или колеса заключается в том, чтобы соприкоснуться с землей и катиться в случае, когда транспортное средство опрокидывается вперед или назад, тем самым удерживая транспортное средство от перевертывания. Присутствие зафиксированного колеса, выдвинутого впереди рамы транспортного средства, ограничивает маневренность транспортного средства из-за уменьшения высоты над землей и ограничения способности транспортного средства пересекать неровную местность и препятствия. Ограниченная маневренность особенно вредна, если транспортное средство является креслом на колесах. Подобное ограничение налагается зафиксированным колесом, расположенным позади задней оси с целью сдержать заднее наклонение транспортного средства.
Другой механизм против опрокидывания, который применялся в кресле на колесах для того, чтобы предотвратить заднее опрокидывание, предполагал два колеса, установленных позади задней оси под шасси кресла на колесах на шарнирных подкосах с пружинами на растяжение.
В соответствии с конкретным исполнением настоящего изобретения предусматривается механизм против опрокидывания для транспортного средства. Механизм против опрокидывания имеет стойку, которая смонтирована таким образом, что позволяет двигаться вокруг оси от убранного положения до раздвинутого положения. Колесо установлено на конце стойки. Механизм против опрокидывания имеет также исполнительный механизм, который вращает стойку от убранного положения до раздвинутого положения.
В соответствии с последующим исполнением изобретения механизм против опрокидывания может иметь механизм зацепления для приведения колеса в контакт с землей. Дополнительно механизм против опрокидывания может иметь воспринимающий элемент для определения момента центра масс непосредственно перед контактом с землей и регулятор в сообщении с воспринимающим элементом для введения в действие исполнительного механизма. Воспринимающим элементом может быть уклономер. Механизмом зацепления для приведения колеса в контакт с землей может быть штанга, помещенная во втулку в стойке.
Механизм против опрокидывания, описанный здесь, выгодно предоставляет возможность раздвинуть колесо для того, чтобы сдержать опрокидывание транспортного средства. Дополнительным преимуществом настоящего изобретения является то, что предусматривается такой механизм против опрокидывания, который не ограничивает маневренность транспортного средства, когда механизм против опрокидывания убран и не раздвинут. Другие цели и преимущества настоящего изобретения являются в части очевидными, а в части указаны в дальнейшем.
Изобретение будет более понятным при ссылке на следующее описание, взятое с прилагаемыми чертежами.
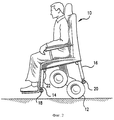
Фиг.1 - вид сбоку транспортного средства типа кресло на колесах, использующего конкретное исполнение изобретения, где два механизма против опрокидывания показаны в убранном положении.
Фиг. 2 - вид сбоку транспортного средства типа кресла на колесах фиг.1, где один механизм против опрокидывания показан в частично раздвинутом положении, обращенным вперед.
Фиг. 3 - вид сбоку транспортного средства типа кресла на колесах фиг.1, где один механизм против опрокидывания показан в частично раздвинутом и частично выдвинутом положении, обращенным вперед.
Фиг. 4 - вид сбоку транспортного средства типа кресло на колесах фиг.1, где один механизм против опрокидывания показан в полностью раздвинутом и полностью выдвинутом положении, обращенным вперед.
Фиг. 5 - вид спереди в перспективе транспортного средства типа кресла на колесах фиг. 1, где один механизм против опрокидывания показан в полностью раздвинутом и полностью выдвинутом положении, обращенным вперед.
Фиг. 6 - вид сбоку транспортного средства типа кресла на колесах фиг.1, где один механизм против опрокидывания показан в частично раздвинутом и частично выдвинутом положении, обращенным назад.
Фиг. 7 - вид сбоку транспортного средства типа кресло на колесах фиг.1, где один механизм против опрокидывания показан в полностью раздвинутом и полностью выдвинутом положении, обращенным назад.
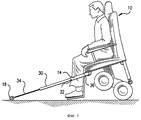
Фиг. 8 - вид снизу в перспективе транспортного средства типа кресло на колесах, применяющего альтернативное исполнение изобретения, где механизм против опрокидывания показан в частично раздвинутом и частично выдвинутом положении, обращенным вперед.
Ссылаясь теперь на фиг.1-4, где вид сбоку транспортного средства типа кресло на колесах, обозначенного в целом цифрой 10, показан в стадиях развития движения опрокидывания вперед. Образец такого транспортного средства описан в совместно рассматриваемой заявке на патент США 08/250693, дата подачи 27 мая 1994 года, изобретатель Камен и др. Ссылаясь конкретно на фиг.1, транспортное средство 10 показано опирающимся на пару расположенных сбоку колес 12, которые обеспечивают контакт транспортного средства 10 с землей. Механизм против опрокидывания, который является предметом настоящего изобретения, конкретно содержащийся в устройствах против опрокидывания вперед, обозначенных в целом цифрой 6, и устройствах против опрокидывания, обращенных назад, обозначенных в целом цифрой 8. В предпочтительном исполнении два устройства против опрокидывания вперед 6 и два устройства против опрокидывания назад 8 прикреплены к транспортному средству 10. В альтернативных исполнениях может быть предусмотрено большее или меньшее количество устройств против опрокидывания. Стойки 14 устройств против опрокидывания 6 и стойки 16 устройств против опрокидывания 8 прикреплены к транспортному средству 10 так, чтобы можно было вращаться вокруг оси в направлении, которое имеет векторную составляющую параллель к направлению движения транспортного средства. В предпочтительном исполнении стойки 14 устройств против опрокидывания 6 и стойки 16 устройств против опрокидывания 8 прикреплены к транспортному средству так, чтобы можно было вращаться в направлении, которое перпендикулярно направлению движения транспортного средства. В пределах объема изобретения и прилагаемых формул устройства против опрокидывания 6 могут также работать полностью в направлении поперек направлению движения транспортного средства.
На фиг.1 стойки 14 и 16 показаны в убранном положении, не выдвинутыми ни впереди, ни позади транспортного средства 10. Это убранное положение показано по существу вертикальным лишь для примера и может быть отклонено вперед или назад от показанного положения. В предпочтительном исполнении стойки 14 энергично раздвигаются исполнительными механизмами 22 и 24, если приближающееся опрокидывание выявлено транспортным средством 10 и опрокидывание не может быть компенсировано иначе, как только теми средствами, которые имеются на транспортном средстве 10. В качестве примера исполнительные механизмы 22 и 24 могут использовать энергию, накопленную в пружине (не показана), и могут также использовать любые средства, известные в технике, для поворота стоек 14 перед опрокидыванием транспортного средства 10. Выявление наклона осуществляется одним из способов, известных в технике, таким как выявление поворота колес 12 по отношению к транспортному средству 10 или посредством уклонометра (не показан) или другого датчика для выявления момента центра масс вокруг точки 13 касания с землей. В ответ на выявленный уклон регулятор, такой как микропроцессор, приводит в действие исполнительные механизмы 22 и 24 с целью развернуть стойки 14 или 16. Колеса 18 и 20 прикреплены к стойкам 14 на удалении от исполнительных механизмов 22 и 24 таким образом, что когда контакт с землей состоялся в точке впереди колес 12, он выполняется колесами 18, а когда контакт с землей состоялся в точке позади колес 12, он выполняется колесами 20.
Ссылаясь теперь на фиг. 2, транспортное средство показано в начальной стадии наклона вперед. В ответ на передний уклон исполнительный механизм 22 показан в начале развертывания стоек 14 путем продвигания вперед стоек 14 на значительную степень переднего разворота. Дальнейшее опрокидывание транспортного средства 10 показано на фиг.3, сопровождающееся дальнейшим развертыванием вперед стоек 14. Затем раздвижной элемент 30 выдвинулся из втулки 32 за счет механизма зацепления (не показан), который содержится внутри стойки 14. Выдвижение раздвижного элемента 30 обеспечивает контакт с землей колеса 18 таким образом, что транспортное средство 10 может продолжать катиться и опрокидывание сдержано. После того как колесо 18 приходит в контакт с землей, стойка 14 может продолжать разворот вперед. В предпочтительном исполнении совместное раздвижение элементов 30 и 34 выполнено последовательно, как показано на фиг.4. Ссылаясь далее на фиг.4, стойка 14 показана в полностью развернутом положении с последующим поворотом вперед, сдерживаемая стопором 36. Затем раздвижные элементы 30 и 34 показаны полностью выдвинутыми таким образом, что дальнейшее опрокидывание транспортного средства 10 предотвращено. Ссылаясь на фиг.5, полностью развернутое положение стоек 14 показано спереди вместе с полностью выдвинутыми раздвижными элементами 30 и 34.
Ссылаясь теперь на фиг.6, транспортное средство 10 показано опрокидывающимся в заднем направлении со стойкой 16 в процессе заднего развертывания и раздвижным элементом 40, выдвинутым с целью привести колесо 20 в контакт с землей для введения во вращение колеса 20. Выдвижение раздвижного элемента 40 обеспечивает контакт с землей колеса 20, таким образом, транспортное средство 10 может продолжать катиться и опрокидывание сдержано. Приведение в действие исполнительного механизма 24 в ответ на опрокидывание транспортного средства является по способу аналогичным тому, которое было описано в отношении стойки 14 в ссылке на фиг.1-5. На фиг.7 стойка 16 показана полностью развернутой с дальнейшим вращением, сдержанным стопором 42. Фиг.8 показывает альтернативное исполнение изобретения, как реализованного на транспортном средстве типа кресло на колесах 10, указывая стойки 14, раздвижные элементы 40 и колеса 20.
Описанные исполнения изобретения предназначаются для того, чтобы являться обоснованием, а многочисленные вариации и модификации будут очевидны для тех, кто опытен в технике. Предполагается, что все подобные вариации и модификации должны находиться в пределах объема настоящего изобретения, как описано в прилагаемых пунктах.
Claims (5)
1. Механизм против опрокидывания для транспортного средства, имеющего точку контакта с землей и центр масс, включающий стойку, установленную с возможностью ее движения вокруг оси от убранного положения до развернутого положения, колесо, установленное на конце стойки, исполнительный механизм для вращения стойки от убранного положения до развернутого положения, воспринимающий элемент для выявления момента центра масс непосредственного перед контактом с землей, и регулятор, связанный с воспринимающим элементом для приведения исполнительного механизма.
2. Механизм против опрокидывания по п.1, кроме того включающий механизм зацепления для приведения колеса в контакт с землей.
3. Механизм против опрокидывания по п.2, в котором механизм зацепления оснащен раздвижным элементом, взаимодействующим со стойкой.
4. Механизм против опрокидывания по п.2, в котором раздвижной элемент является штангой, закрепленной во втулке стойки.
5. Механизм против опрокидывания по п.1, в котором воспринимающим элементом является уклонометр.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US2187296P | 1996-07-17 | 1996-07-17 | |
| US60/021,872 | 1996-07-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU99103214A RU99103214A (ru) | 2001-02-20 |
| RU2190382C2 true RU2190382C2 (ru) | 2002-10-10 |
Family
ID=21806608
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU99103214/14A RU2190382C2 (ru) | 1996-07-17 | 1997-07-14 | Механизм против опрокидывания для транспортного средства |
Country Status (14)
| Country | Link |
|---|---|
| US (1) | US6062600A (ru) |
| EP (1) | EP0912154B1 (ru) |
| JP (1) | JP2000514680A (ru) |
| CN (1) | CN1163209C (ru) |
| AT (1) | ATE279895T1 (ru) |
| AU (1) | AU710104B2 (ru) |
| BR (1) | BR9710331A (ru) |
| CA (1) | CA2260220C (ru) |
| DE (1) | DE69731296T2 (ru) |
| IL (1) | IL127778A (ru) |
| NO (1) | NO321573B1 (ru) |
| RU (1) | RU2190382C2 (ru) |
| TW (1) | TW353619B (ru) |
| WO (1) | WO1998002122A1 (ru) |
Families Citing this family (105)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU728453B2 (en) * | 1995-02-03 | 2001-01-11 | Deka Research And Development Corporation | Indication system for a vehicle |
| WO1998038958A1 (en) * | 1997-03-05 | 1998-09-11 | Massachusetts Institute Of Technology | A reconfigurable footprint mechanism for omnidirectional vehicles |
| GB2331963B (en) * | 1997-10-22 | 2002-01-23 | Andrew Paul Ockwell | A pushchair stand and brake |
| US6530598B1 (en) | 1999-04-29 | 2003-03-11 | Ronald Lee Kirby | Anti-tip devices for wheeled conveyances including wheelchairs and method related thereto |
| US6405816B1 (en) * | 1999-06-03 | 2002-06-18 | Deka Products Limited Partnership | Mechanical improvements to a personal vehicle |
| US7275607B2 (en) | 1999-06-04 | 2007-10-02 | Deka Products Limited Partnership | Control of a personal transporter based on user position |
| JP4769915B2 (ja) * | 2000-05-01 | 2011-09-07 | 独立行政法人労働安全衛生総合研究所 | 車椅子用転倒衝撃吸収装置 |
| JP3527686B2 (ja) | 2000-05-08 | 2004-05-17 | 株式会社カワムラサイクル | 車椅子の転倒防止機構及び車椅子 |
| US6752400B2 (en) | 2000-06-09 | 2004-06-22 | Shimadzu Mectem, Inc. | Moving unit |
| US6554086B1 (en) | 2000-10-27 | 2003-04-29 | Invacare Corporation | Obstacle traversing wheelchair |
| US7040429B2 (en) * | 2001-10-10 | 2006-05-09 | Invacare Corporation | Wheelchair suspension |
| US7066290B2 (en) | 2001-10-19 | 2006-06-27 | Invacare Corp. | Wheelchair suspension having pivotal motor mount |
| US20040032119A1 (en) * | 2002-05-29 | 2004-02-19 | Sy Tran | Control of an anti-tip wheel in wheelchairs |
| AU2003247972A1 (en) | 2002-07-12 | 2004-02-02 | Deka Products Limited Partnership | Control of a transporter based on attitude |
| JP2004074814A (ja) * | 2002-08-09 | 2004-03-11 | Matsushita Electric Works Ltd | 人用移動機器 |
| US6776430B2 (en) | 2002-09-09 | 2004-08-17 | Pride Mobility Products Corporation | Stabilizing system for a reclinable wheelchair |
| US7011171B1 (en) * | 2002-10-08 | 2006-03-14 | Poulter Andrew R | Rugged terrain robot |
| US11213441B2 (en) | 2002-10-25 | 2022-01-04 | Invacare Corporation | Suspension for wheeled vehicles |
| US7293801B2 (en) * | 2003-08-18 | 2007-11-13 | Invacare Corporation | Self-stabilizing suspension for wheeled vehicles |
| JP4422415B2 (ja) * | 2003-01-17 | 2010-02-24 | トヨタ自動車株式会社 | 2輪車 |
| NL1023378C2 (nl) * | 2003-05-09 | 2004-11-15 | Movingpeople Net Internat B V | Rolstoel. |
| US7311329B2 (en) * | 2003-05-23 | 2007-12-25 | Pride Mobility Products Corporation | Anti-tip wheel for a wheelchair |
| US7232008B2 (en) * | 2003-10-08 | 2007-06-19 | Pride Mobility Products Corporation | Active anti-tip wheels for power wheelchair |
| JP4333398B2 (ja) * | 2004-02-17 | 2009-09-16 | トヨタ車体株式会社 | ホイールベース可変式車輌 |
| DE102004010089A1 (de) * | 2004-02-27 | 2005-09-15 | Losch Airport Equipment Gmbh | Transportfahrzeug für Rollstühle |
| US20060076748A1 (en) * | 2004-10-08 | 2006-04-13 | Sunrise Medical Hhg Inc. | Wheelchair with damping mechanism |
| US7360792B2 (en) * | 2004-10-20 | 2008-04-22 | Pride Mobility Products Corporation | Power wheelchair |
| US20060091663A1 (en) * | 2004-10-21 | 2006-05-04 | Sunrise Medical Hhg Inc. | Wheelchair with telescopic anti-tip wheel |
| CN100557539C (zh) * | 2005-07-26 | 2009-11-04 | 松下电器产业株式会社 | 倒立二轮行走型机器人及其控制方法 |
| US7854435B2 (en) * | 2005-10-06 | 2010-12-21 | Colin Alan Campbell | Wheel mechanism |
| JP4556831B2 (ja) * | 2005-10-13 | 2010-10-06 | トヨタ自動車株式会社 | 走行装置及びその制御方法 |
| US7744331B2 (en) * | 2006-01-26 | 2010-06-29 | Xerox Corporation | Transport vehicle and method |
| JP4291822B2 (ja) * | 2006-02-03 | 2009-07-08 | トヨタ自動車株式会社 | 倒立車輪型の走行体 |
| JP2007237750A (ja) * | 2006-03-03 | 2007-09-20 | Toyota Motor Corp | 倒立振子型移動体 |
| DE102006013910B3 (de) * | 2006-03-25 | 2007-07-26 | Otto Bock Healthcare Ip Gmbh & Co. Kg | Kippschutz für Rollstühle |
| US7686319B1 (en) * | 2006-05-31 | 2010-03-30 | Robert M Fink | Double amputee conveyance |
| CN101135522B (zh) * | 2006-08-30 | 2011-02-02 | 海尔集团公司 | 具有防倾倒装置的整体制冷压缩机仓冷柜 |
| EP1943995A1 (en) * | 2007-01-12 | 2008-07-16 | Invacare International Sàrl | A wheeled conveyance with suspension arms for wheels |
| DK2277490T3 (en) | 2007-02-08 | 2015-04-13 | Invacare Corp | Wheelchair suspension |
| CA2676724C (en) | 2007-02-14 | 2013-12-17 | Invacare Corporation | Stability control system |
| US20100114421A1 (en) * | 2007-03-29 | 2010-05-06 | Equos Research Co., Ltd. | Vehicle |
| JP5024662B2 (ja) * | 2007-03-29 | 2012-09-12 | 株式会社エクォス・リサーチ | 車両 |
| JP5004003B2 (ja) * | 2007-03-29 | 2012-08-22 | 株式会社エクォス・リサーチ | 車両 |
| JP4858847B2 (ja) * | 2007-03-29 | 2012-01-18 | 株式会社エクォス・リサーチ | 車両 |
| JP4924179B2 (ja) * | 2007-04-25 | 2012-04-25 | トヨタ自動車株式会社 | 倒立車輪型移動体、及びその制御方法 |
| JP4973303B2 (ja) * | 2007-04-27 | 2012-07-11 | トヨタ自動車株式会社 | 倒立型移動体および倒立型移動体の移動停止方法 |
| JP4867823B2 (ja) | 2007-07-09 | 2012-02-01 | トヨタ自動車株式会社 | 倒立車輪型移動体、及びその制御方法 |
| JP4681016B2 (ja) | 2008-03-10 | 2011-05-11 | 株式会社豊田中央研究所 | 倒立振子型車輪移動体 |
| JP5158712B2 (ja) * | 2008-11-14 | 2013-03-06 | アイシン精機株式会社 | パーソナルビークル |
| KR101265745B1 (ko) | 2008-11-27 | 2013-05-20 | 도요타 지도샤(주) | 이동체 및 그 제어방법 |
| JP5045707B2 (ja) * | 2009-05-28 | 2012-10-10 | トヨタ自動車株式会社 | 走行装置、その制御方法、及び制御プログラム |
| EP2485698B1 (en) | 2009-10-09 | 2017-05-17 | Invacare Corporation | Wheelchair suspension |
| US20110204592A1 (en) * | 2010-02-17 | 2011-08-25 | Johansen N Layne | Mobility and Accessibility Device and Lift |
| US8616574B2 (en) * | 2011-09-12 | 2013-12-31 | Donald MONACO | Compact ergonomic mobility chair |
| ITMI20112311A1 (it) * | 2011-12-19 | 2013-06-20 | Gm Italia S R L | Carrozzella motorizzata |
| AU2015249084B2 (en) * | 2012-02-09 | 2017-09-07 | Omeo Group Limited | Powered Mobility Device with Tilt Mechanism Having Multiple Pivots |
| NZ628837A (en) | 2012-02-15 | 2016-10-28 | Invacare Corp | Wheelchair suspension |
| JP5922489B2 (ja) * | 2012-05-14 | 2016-05-24 | 本田技研工業株式会社 | 倒立振子型車両 |
| CN103010190B (zh) * | 2012-12-14 | 2014-11-12 | 盐城市盐海拖拉机制造有限公司 | 一种手扶拖拉机安全刹车装置 |
| WO2015098722A1 (ja) * | 2013-12-25 | 2015-07-02 | 株式会社村田製作所 | 手押し車 |
| JP6179398B2 (ja) * | 2013-12-27 | 2017-08-16 | トヨタ自動車株式会社 | 同軸二輪車の制御方法 |
| US9186289B2 (en) * | 2014-04-14 | 2015-11-17 | James Nicholas | Anti-tipping safety device |
| JP6278113B2 (ja) * | 2014-06-23 | 2018-02-14 | 株式会社村田製作所 | 手押し車 |
| DE102014113278B4 (de) * | 2014-09-15 | 2016-08-25 | Freee Mobility Gmbh | Stützsystem, elektronisch selbstbalancierter Rollstuhl, Verfahren zum Steuern eines Stützsystems und Umrüstsatz |
| US9682603B2 (en) * | 2014-10-10 | 2017-06-20 | Max Mobility, Llc | System and method for adjusting a wheelchair seat |
| US9889562B1 (en) | 2015-10-16 | 2018-02-13 | X Development Llc | Smart kickstand for balancing a mobile robotic arm |
| US10908045B2 (en) | 2016-02-23 | 2021-02-02 | Deka Products Limited Partnership | Mobility device |
| EP4194971A1 (en) | 2016-02-23 | 2023-06-14 | DEKA Products Limited Partnership | Method for establishing the center of gravity for a mobility device |
| US10926756B2 (en) | 2016-02-23 | 2021-02-23 | Deka Products Limited Partnership | Mobility device |
| US11399995B2 (en) | 2016-02-23 | 2022-08-02 | Deka Products Limited Partnership | Mobility device |
| JP6916812B2 (ja) | 2016-04-14 | 2021-08-11 | デカ・プロダクツ・リミテッド・パートナーシップ | トランスポータのためのユーザ制御デバイス |
| MX2023008304A (es) * | 2016-05-20 | 2024-02-29 | Deka Products Lp | Dispositivo de movilidad. |
| USD840872S1 (en) | 2016-07-20 | 2019-02-19 | Razor Usa Llc | Two wheeled board |
| USD837323S1 (en) | 2018-01-03 | 2019-01-01 | Razor Usa Llc | Two wheeled board |
| USD807457S1 (en) | 2016-07-20 | 2018-01-09 | Razor Usa Llc | Two wheeled board |
| USD941948S1 (en) | 2016-07-20 | 2022-01-25 | Razor Usa Llc | Two wheeled board |
| USD803963S1 (en) | 2016-07-20 | 2017-11-28 | Razor Usa Llc | Two wheeled board |
| CN106240698B (zh) * | 2016-08-01 | 2018-11-06 | 林允杜 | 一种高安全性高稳定性平衡车 |
| US10772774B2 (en) | 2016-08-10 | 2020-09-15 | Max Mobility, Llc | Self-balancing wheelchair |
| EP3311786A1 (en) * | 2016-10-21 | 2018-04-25 | Airbus Defence and Space Limited | Vehicle wheel assembly |
| JP6746521B2 (ja) * | 2017-03-16 | 2020-08-26 | Whill株式会社 | 電動モビリティおよびその分解方法 |
| US12227257B2 (en) | 2017-04-01 | 2025-02-18 | Razor Usa Llc | Electric balance vehicles |
| USD846452S1 (en) | 2017-05-20 | 2019-04-23 | Deka Products Limited Partnership | Display housing |
| USD1047785S1 (en) | 2017-05-20 | 2024-10-22 | Deka Products Limited Partnership | Toggle control device |
| USD829612S1 (en) | 2017-05-20 | 2018-10-02 | Deka Products Limited Partnership | Set of toggles |
| CN107361931A (zh) * | 2017-08-17 | 2017-11-21 | 福尔智能科技南通有限公司 | 一种防倾斜轮椅床 |
| EP3446669B1 (de) | 2017-08-25 | 2020-07-29 | Lukas Rigler | Stützsystem für einen elektronisch selbstbalancierten rollstuhl |
| CN108186220A (zh) * | 2017-12-22 | 2018-06-22 | 江阴市新盛医疗器材设备有限公司 | 一种防摔倒轮 |
| US11654995B2 (en) | 2017-12-22 | 2023-05-23 | Razor Usa Llc | Electric balance vehicles |
| FR3079139A1 (fr) * | 2018-03-26 | 2019-09-27 | Vincent Poullet | Fauteuil roulant avec element stabilisateur pilote |
| CA3239378A1 (en) | 2018-06-07 | 2019-12-12 | Deka Products Limited Partnership | System and method for distributed utility service execution |
| US11602468B2 (en) | 2018-06-12 | 2023-03-14 | Rehabilitation Institute Of Chicago | Methods and apparatus for increasing the effectiveness of wheelchair training |
| JP7030188B2 (ja) * | 2018-06-20 | 2022-03-04 | 本田技研工業株式会社 | 移動体 |
| CN108652848B (zh) * | 2018-06-21 | 2019-12-03 | 朱全祥 | 一种可跃障碍轮椅 |
| CN109431700B (zh) * | 2018-11-02 | 2020-04-24 | 定远县中林机械技术有限公司 | 一种多功能轮椅 |
| CN109646756B (zh) * | 2018-12-29 | 2021-01-29 | 中国人民解放军陆军军医大学第一附属医院 | 一种重力式防倾倒输液车 |
| US10905607B2 (en) * | 2019-01-29 | 2021-02-02 | Toyota Motor North America, Inc. | Modular power base arrangement |
| CN111184609A (zh) * | 2019-02-25 | 2020-05-22 | 永康国科康复工程技术有限公司 | 一种助行装置 |
| JP7125236B2 (ja) * | 2019-04-05 | 2022-08-24 | 国立大学法人 東京大学 | 走行装置 |
| CN111803337A (zh) * | 2019-04-12 | 2020-10-23 | 曹可瀚 | 防倾倒助行装置和使用方法 |
| US11903887B2 (en) | 2020-02-25 | 2024-02-20 | Invacare Corporation | Wheelchair and suspension systems |
| JP7009535B2 (ja) * | 2020-03-16 | 2022-02-10 | 本田技研工業株式会社 | 乗り物及び乗り物の制御方法 |
| FR3116792B1 (fr) * | 2020-11-30 | 2022-11-04 | Univ Versailles Saint Quentin En Yvelines | Dispositif d’aide au déplacement d’une charge |
| CN112837498A (zh) * | 2021-03-01 | 2021-05-25 | 国网冀北电力有限公司唐山供电公司 | 一种线路检修用安全防护装置及其使用方法 |
| CN114587809A (zh) * | 2022-03-29 | 2022-06-07 | 中南大学湘雅二医院 | 一种防止病人摔倒的新型心内科护理专用轮椅 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1591529A (en) * | 1922-05-12 | 1926-07-06 | Roger S S Guerber | Invalid chair |
| SU1586706A1 (ru) * | 1988-06-13 | 1990-08-23 | Иркутский Авиационный Завод Им.60-Летия Союза Сср | Инвалидна кол ска |
| SU1634276A1 (ru) * | 1988-02-01 | 1991-03-15 | М.С.Исламов | Кол ска дл инвалидов |
| SU1752386A1 (ru) * | 1990-01-31 | 1992-08-07 | А.Д.Лебедев | Инвалидна кол ска |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE50975C (de) * | FR. A. ZSCHIESCHE in Cottbus | Vorrichtung zur Verhütung des Urnfallens von Kinderwagen | ||
| US2402322A (en) * | 1945-04-25 | 1946-06-18 | Jr Andrew J Flynn | Antitipping device for infants' vehicles |
| US3397898A (en) * | 1967-02-06 | 1968-08-20 | Caterpillar Tractor Co | Stabilizer for motor vehicle |
| US3804435A (en) * | 1971-09-15 | 1974-04-16 | Caterpillar Tractor Co | Vehicle roll-over safety apparatus |
| JPS5144534Y2 (ru) * | 1973-04-17 | 1976-10-28 | ||
| US3848883A (en) * | 1973-08-08 | 1974-11-19 | S Breacain | Wheelchair anti-tip apparatus |
| JPS6033172A (ja) * | 1983-08-05 | 1985-02-20 | Hiroyasu Funakubo | 走行・歩行装置 |
| US4691798A (en) * | 1985-10-10 | 1987-09-08 | Engelbach Thomas S | System for automatically preventing turnover of two wheeled vehicles |
| WO1988003012A1 (fr) * | 1986-10-24 | 1988-05-05 | Comporgan Rendszerház K.V. | Fauteuil roulant pour handicapes, permettant notamment de monter les escaliers |
| JPH048061Y2 (ru) * | 1987-01-16 | 1992-03-02 | ||
| DE3800476A1 (de) * | 1988-01-11 | 1989-07-20 | Anschuetz & Co Gmbh | Verfahren zum stabilisieren eines einachsigen radfahrzeugs und fahrzeug, das nach diesem verfahren stabilisiert ist |
| IL91588A (en) * | 1989-09-10 | 1994-10-07 | Propel Partnership 1987 | Electric drive attachment for wheelchairs |
| EP0557440B1 (en) * | 1990-11-14 | 1998-07-15 | Invacare Corporation | Attended to self-propelled convertible pivoting wheelchair |
| US5421598A (en) * | 1991-04-26 | 1995-06-06 | Everest & Jennings International, Ltd. | Modular wheelchair |
| JP2530127Y2 (ja) * | 1991-06-07 | 1997-03-26 | セイレイ工業株式会社 | 高所作業車の転倒防止機構 |
| JPH0582345U (ja) * | 1992-04-09 | 1993-11-09 | 中川研材株式会社 | 簡易ベッド兼用型いす |
| US5401055A (en) * | 1992-05-28 | 1995-03-28 | Pham; Roger | Space efficient center tracking vehicle |
| DE4231876C1 (de) * | 1992-09-23 | 1994-04-21 | Christian Klepsch | Treppengängiger Rollstuhl |
| DE4334069A1 (de) * | 1993-06-21 | 1995-04-13 | Zeiss Carl Fa | Ausbalancierbares Stativ |
| JPH0731656A (ja) * | 1993-07-23 | 1995-02-03 | Kazuo Tsuruta | 座席部を傾斜昇降できる車椅子並に浴槽ユニット |
| US5513716A (en) * | 1994-05-09 | 1996-05-07 | Trustees Of The University Of Pennsylvania | Adaptive mobility system |
| EP0740542B1 (fr) * | 1994-11-18 | 2005-02-02 | Degonda-Rehab S.A. | Siege roulant pour le transport ou l'assistance au deplacement d'au moins un utilisateur, notamment d'une personne handicapee |
| ATE281138T1 (de) * | 1995-02-03 | 2004-11-15 | Deka Products Lp | Transportfahrzeuge und verfahren |
-
1997
- 1997-07-14 BR BR9710331A patent/BR9710331A/pt not_active IP Right Cessation
- 1997-07-14 EP EP97932588A patent/EP0912154B1/en not_active Expired - Lifetime
- 1997-07-14 WO PCT/US1997/012145 patent/WO1998002122A1/en not_active Ceased
- 1997-07-14 AU AU40004/97A patent/AU710104B2/en not_active Expired
- 1997-07-14 IL IL12777897A patent/IL127778A/en not_active IP Right Cessation
- 1997-07-14 US US08/892,566 patent/US6062600A/en not_active Expired - Lifetime
- 1997-07-14 CN CNB97196386XA patent/CN1163209C/zh not_active Expired - Fee Related
- 1997-07-14 CA CA002260220A patent/CA2260220C/en not_active Expired - Fee Related
- 1997-07-14 RU RU99103214/14A patent/RU2190382C2/ru not_active IP Right Cessation
- 1997-07-14 DE DE69731296T patent/DE69731296T2/de not_active Expired - Lifetime
- 1997-07-14 JP JP10506194A patent/JP2000514680A/ja active Pending
- 1997-07-14 AT AT97932588T patent/ATE279895T1/de not_active IP Right Cessation
- 1997-07-30 TW TW086110288A patent/TW353619B/zh active
-
1998
- 1998-12-22 NO NO19986067A patent/NO321573B1/no not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1591529A (en) * | 1922-05-12 | 1926-07-06 | Roger S S Guerber | Invalid chair |
| SU1634276A1 (ru) * | 1988-02-01 | 1991-03-15 | М.С.Исламов | Кол ска дл инвалидов |
| SU1586706A1 (ru) * | 1988-06-13 | 1990-08-23 | Иркутский Авиационный Завод Им.60-Летия Союза Сср | Инвалидна кол ска |
| SU1752386A1 (ru) * | 1990-01-31 | 1992-08-07 | А.Д.Лебедев | Инвалидна кол ска |
Also Published As
| Publication number | Publication date |
|---|---|
| NO986067L (no) | 1999-01-29 |
| AU710104B2 (en) | 1999-09-16 |
| WO1998002122A1 (en) | 1998-01-22 |
| TW353619B (en) | 1999-03-01 |
| IL127778A0 (en) | 1999-10-28 |
| CA2260220C (en) | 2006-05-16 |
| BR9710331A (pt) | 1999-08-17 |
| NO986067D0 (no) | 1998-12-22 |
| ATE279895T1 (de) | 2004-11-15 |
| EP0912154B1 (en) | 2004-10-20 |
| US6062600A (en) | 2000-05-16 |
| EP0912154A1 (en) | 1999-05-06 |
| JP2000514680A (ja) | 2000-11-07 |
| AU4000497A (en) | 1998-02-09 |
| CN1163209C (zh) | 2004-08-25 |
| NO321573B1 (no) | 2006-06-06 |
| IL127778A (en) | 2004-09-27 |
| CN1225004A (zh) | 1999-08-04 |
| DE69731296T2 (de) | 2005-11-17 |
| DE69731296D1 (de) | 2004-11-25 |
| CA2260220A1 (en) | 1998-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2190382C2 (ru) | Механизм против опрокидывания для транспортного средства | |
| US5316328A (en) | Bumper mounted anti-tip stabilizers for chair-mounting vehicles utilized by physically disadvantaged persons and others desiring mobility assistance, and methods of stabilizing such vehicles | |
| US6394738B1 (en) | Automatic outrigger for a vehicle | |
| US4684142A (en) | Steerable auxiliary axle | |
| JPS5849562A (ja) | 2輪車用安定システム | |
| EP3538406A1 (en) | A carriage for moving a wheeled object | |
| US7673902B2 (en) | Deployable running board to provide rollover resistance | |
| US4437537A (en) | Vehicle for supporting handicapped occupants | |
| CN1154459C (zh) | 用于乘车人与车辆安全分开的机构和方法 | |
| KR101290955B1 (ko) | 차체 자세 제어용 측방 안전 바퀴를 구비한 휠체어 | |
| CN208993840U (zh) | 一种电动平衡车 | |
| JPS62117557A (ja) | 移動台車 | |
| KR100663951B1 (ko) | 전복 방지 휠체어 | |
| WO2003051675A1 (en) | A support device for a statically unstable and dynamically stable personal vehicle | |
| EP1475063B1 (en) | Wheel Chair | |
| KR101290837B1 (ko) | 차체 자세 제어용 측방 안전 바퀴를 구비한 휠체어 | |
| JP4252843B2 (ja) | 車椅子 | |
| JP3318181B2 (ja) | トラクターの転倒保護フレーム固定装置 | |
| JPH05168662A (ja) | 電動歩行機 | |
| HUP0600811A2 (en) | Safety system for vehicles | |
| SU1685760A1 (ru) | Устройство дл предотвращени опрокидывани транспортного средства | |
| RU2003552C1 (ru) | Устройство дл предотвращени скольжени и опрокидывани трактора | |
| JPS59166006A (ja) | ロ−タリ自動水平装置を有するトラクタにおける横転防止装置 | |
| JP2515985Y2 (ja) | キャッチャー付き運搬車の荷物キャッチ構造 | |
| JPS6316586Y2 (ru) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20110715 |