RU2201577C2 - Способ измерения геометрических параметров профиля дороги и устройство для его осуществления - Google Patents
Способ измерения геометрических параметров профиля дороги и устройство для его осуществления Download PDFInfo
- Publication number
- RU2201577C2 RU2201577C2 RU2000106327/28A RU2000106327A RU2201577C2 RU 2201577 C2 RU2201577 C2 RU 2201577C2 RU 2000106327/28 A RU2000106327/28 A RU 2000106327/28A RU 2000106327 A RU2000106327 A RU 2000106327A RU 2201577 C2 RU2201577 C2 RU 2201577C2
- Authority
- RU
- Russia
- Prior art keywords
- road
- profile
- analog signals
- parameters
- radiation
- Prior art date
Links
Images
Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
Изобретение относится к строительству и эксплуатации дорог и касается определения геометрических параметров профиля дорожного покрытия. Для измерения геометрических параметров в процессе движения автомобиля на поверхность дорожного покрытия в поперечном его направлении подают отдельные излучения лазерного света, которые преобразуют в непрерывную линию, оптическими приемниками принимают отраженные линейные излучения, преобразуют отраженные линейные излучения в аналоговые сигналы по форме профиля дороги. Компаратором из аналоговых сигналов выделяют части, соответствующие отдельным отраженным излучениям, и преобразуют их в TTL-уровень. Процессорным блоком в заданные отрезки времени синхронизируют и суммируют отдельные аналоговые сигналы и с помощью ЭВМ по заданным программам определяют параметры поперечного профиля дороги в виде координат его точек с заданным шагом измерения. Колебания кузова автомобиля в процессе движения автомобиля корректируют. Технический результат - повышение достоверности и точности измеряемых параметров, простота обслуживания. 2 с.п.ф-лы, 4 ил.
Description
Изобретение относится к области транспорта, а точнее к строительству и эксплуатации дорог, дорожных покрытий, машинам и вспомогательному оборудованию для строительства, ремонта дорог.
Известен способ измерения геометрических параметров профиля дороги, включающий подачу на поверхность дорожного покрытия в процессе движения автомобиля световых излучений и воздействие на нее механическими контактными датчиками, прием отраженных излучений и сигналов от контактных датчиков и их преобразование в аналоговые сигналы, обработку аналоговых сигналов, определение по заданным программам геометрических параметров профиля дороги в виде поперечного профиля, продольного профиля, колейности покрытия, дефектов и объектов дорожной поверхности (см., например, патент ЕР 0215948, кл. G 01 В 11/30, G 01 В 11/24, публ. 1985 г.).
Недостаток известного способа заключается в том, что он не позволяет одновременно в один отрезок времени оценивать все геометрические параметры профиля дороги, требует применения разных систем воздействия на поверхность дорожного покрытия, установленных на кузове спереди и сзади автомобиля, и не учитывает влияние колебаний кузова автомобиля в процессе движения, что снижает точность оценки параметров дорожного покрытия.
Известен способ измерения геометрических параметров профиля дороги, включающий подачу на поверхность дорожного покрытия в процессе движения автомобиля ультразвуковых сигналов поперек направления движения автомобиля и лазерного светового потока, прием отраженных сигналов и их преобразование в геометрические параметры профиля дороги в виде продольного профиля, ровности, поперечного профиля и колейности, дефектов дорожного покрытия с учетом коррекции колебаний кузова автомобиля при его движении (см., например, каталог фирмы VTT, Финляндия 1992 г., Road, Traffic and Geotechnical Laboratory, приложение 1).
Недостаток известного способа заключается в том, что использование отдельных дискретных ультразвуковых сигналов, подаваемых поперек поверхности дорожного покрытия для оценки его геометрических параметров, снижает точность измерений и обнаружения дефектов покрытия, а использование одного лазерного источника излучений для измерения продольной ровности не позволяет конкретизировать изменения продольной ровности по ширине дорожного покрытия, при этом использование нескольких аналитических систем и программ, применяемых для определения и анализа измеренных параметров, усложняет обслуживание.
Известен способ измерения геометрических параметров профиля дороги, включающий подачу на поверхность дорожного покрытия световых лазерных излучений, прием тремя камерами телеметрической системы отраженных от поверхности излучений и их преобразование в геометрические параметры профиля дороги (см. , например, патент США 4928175, кл. НКИ 358-108, кл. МПК Н 04 N 7/18, публ. 1986 г., или патент Финляндии 861550, кл. МПК Н 04 N 7/18, публ. 1986 г.; или патент WO 87/06353, кл. МПК Н 04 N 7/18, публ. 1987 г.).
Известный способ из-за использования в движущемся автомобиле телевизионных систем и лазерного сканирующего устройства, предназначенных для измерения геометрических параметров, предъявляет дополнительные требования к синхронизации процессов в заданные отрезки времени, усложняет обслуживание систем, обеспечивающих поддержание эксплуатационных требований к процессу измерения вследствие использования усложненного программного обеспечения, приводит к необходимости дополнительных корректировок измеряемых параметров по отношению к базовому уровню отсчета.
Известен наиболее близкий к описываемому по технической сущности и назначению способ измерения геометрических параметров профиля дороги, включающий подачу на поверхность дорожного покрытия в поперечном его направлении в процессе движения автомобиля ряда излучений лазерного света, прием отраженных излучений и их преобразование в аналоговые сигналы, передачу, преобразование аналоговых сигналов и определение по заданным программам геометрических параметров профиля дороги в виде поперечного профиля дороги, колейности дорожного покрытия, шероховатости, продольной ровности, дефектов дорожного покрытия и их геометрических размеров с привязкой параметров профиля дороги к пройденному пути, коррекцию геометрических параметров в зависимости от колебаний кузова автомобиля (см., например, каталог Swedish Road and Transport Research Institute, Road Surface Testing, 1980 г., приложение 2).
Недостаток данного известного способа заключается в том, что он не позволяет из-за использования отдельных дискретных излучений в виде пучков лазерного света цилиндрической формы с достаточной точностью и достоверностью измерять поперечный профиль дороги, что приводит к снижению точности измерения остальных геометрических параметров профиля дороги, а выборочное в каком-либо одном, определенном заранее, предварительно заданном продольном направлении измерение текстуры поверхности, трещин не позволяет оценивать состояние поверхности дорожного покрытия по всей ее ширине, а аппроксимация профиля по отдельным, редко расположенным точкам измерения не приводит к построению качественных характеристик.
Задача, на решение которой направлено описываемое изобретение, заключается в создании такого способа измерения геометрических параметров профиля дороги, который бы позволил использовать одну видовую систему воздействия на поверхность дорожного покрытия и приема отраженных излучений, использовать программное обеспечение одного системного вида при одновременном определении всех геометрических параметров профиля дороги в продольном и поперечном направлениях. Одновременно решается задача расширения арсенала методов и технических средств, предназначенных для измерения и определения геометрических параметров профиля дороги.
Технический результат, который может быть получен при осуществлении данного изобретения, заключается в повышении достоверности и точности измеряемых параметров за счет непрерывного их измерения в поперечном направлении, позволяет одновременно оценивать по всей ширине дорожного покрытия все геометрические параметры его профиля и упростить обслуживание.
Это достигается тем, что в известном способе измерения геометрических параметров профиля дороги, который включает подачу на поверхность дорожного покрытия в поперечном его направлении в процессе движения автомобиля ряда излучений лазерного света, прием отраженных излучений и их преобразование в аналоговые сигналы, передачу, преобразование аналоговых сигналов и определение по заданным программам геометрических параметров профиля дороги в виде поперечного профиля дороги, колейности дорожного покрытия, шероховатости, продольной ровности, дефектов дорожного покрытия и их геометрических размеров с привязкой параметров профиля дороги к пройденному пути, коррекцию геометрических параметров в зависимости от колебаний кузова автомобиля, накопление информации и обслуживание пользователей, в соответствии с описываемым способом, излучения подают в виде линий лазерного света с образованием непрерывной линии по ширине поверхности дорожного покрытия, аналоговые сигналы синхронизируют и суммируют в заданные отрезки времени, выделяют из них части, соответствующие отраженному излучению по форме поперечного профиля дороги в виде непрерывной линии, преобразовывают эти части в TTL-уровень с выделением из него геометрических параметров профиля дороги в виде координат его точек, при этом размерные координаты поперечного профиля с заданным шагом определяют по зависимости:
Yi = f(x0+ih)+g(x0+ih),
где f(x0+ih) - сплайн-функция, построенная по измеренным значениям;
x0 - начальная координата;
i - номер точки;
h - заданный шаг;
g(x) - корректирующая колебаний кузова автомобиля в процессе движения;
колейность покрытия определяют по зависимости:

где f(x) - функция, описывающая поперечный профиль дорожного покрытия;
x - текущая координата;
a, b - коэффициенты линейного преобразования;
Е - заданная глубина колеи;
микрошероховатость поверхности в поперечнике определяют по зависимости:

где hi - текущий размер микронеровности, определяемый как

f(x) - функция, описывающая профиль поверхности;
Рn(x) - приближение функции полиномом Фурье;
n - степень полинома.
Yi = f(x0+ih)+g(x0+ih),
где f(x0+ih) - сплайн-функция, построенная по измеренным значениям;
x0 - начальная координата;
i - номер точки;
h - заданный шаг;
g(x) - корректирующая колебаний кузова автомобиля в процессе движения;
колейность покрытия определяют по зависимости:
где f(x) - функция, описывающая поперечный профиль дорожного покрытия;
x - текущая координата;
a, b - коэффициенты линейного преобразования;
Е - заданная глубина колеи;
микрошероховатость поверхности в поперечнике определяют по зависимости:
где hi - текущий размер микронеровности, определяемый как
f(x) - функция, описывающая профиль поверхности;
Рn(x) - приближение функции полиномом Фурье;
n - степень полинома.
Известно устройство для измерения геометрических параметров профиля дороги, содержащее излучатели, приемники отраженных излучений, контактные с поверхностью дорожного покрытия механические датчики, преобразователи отраженных излучений и сигналов с контактных датчиков в аналоговые сигналы, датчики времени и пройденного пути, программный комплекс, ЭВМ (см., например, патент ЕР 0215948, кл. G 01 B 11/30, G 01 B 11/24, публ. 1985 г.).
Недостаток известного устройства заключается в том, что для подачи световых сигналов, приема их отражений от дорожного покрытия, фиксации на носитель информации сведений о параметрах профиля дороги, использованы раздельно и разного вида оптические, фиксирующие и механические датчики, установленные спереди и сзади автомобиля, что требует дополнительных средств синхронизации во времени и привязки к конкретному участку пройденного пути измеряемых параметров, также программного обеспечения под каждый вид применяемого оборудования.
Это усложняет процесс определения и преобразования в координаты точек профиля поверхности дороги параметров конкретных участков пройденного пути, не позволяет одновременно оценивать и устанавливать взаимозависимость параметров. Кроме того, известное устройство работает при пониженных скоростях движения автомобиля и не позволяет проводить коррекцию измеряемых и фиксируемых параметров профиля дороги в зависимости от колебаний кузова автомобиля.
Известно наиболее близкое по технической сущности, назначению и достигаемому результату устройство для измерения геометрических параметров профиля дороги, содержащее установленные в ряд на поперечной балке переднего бампера автомобиля излучатели с оптическими системами для подачи пучков лазерного света на поверхность дорожного покрытия, оптические приемники, преобразователи отраженных излучений в аналоговые сигналы, преобразователи аналоговых сигналов, процессорный блок, программный комплекс, ЭВМ, датчики корректировки колебаний кузова автомобиля, датчики времени и пройденного пути (см. , например, каталог Swedish Road and Transport Research Institute, Road Surface Testing, 1980 г., приложение 2).
Недостаток известного устройства заключается в том, что вследствие установки на бампере ряда отдельных излучателей, каждый из которых фиксирует координаты конкретных точек поверхности дороги на определенном расстоянии друг от друга, измеряемые координаты и параметры точек профиля носят дискретный характер, а их аппроксимация в линию поперечного профиля дорожного покрытия приводит к значительным погрешностям и не позволяет достигнуть высокой точности измерения. Кроме того, не достигается определение всех дефектов поверхности по ширине дорожного покрытия, что снижает эффективность использования известного устройства.
Задача, на решение которой направлено описываемое изобретение, заключается в создании такого комплексного устройства, которое бы позволило использовать однотипное оборудование и приборы для измерения геометрических параметров профиля дороги, расширить арсенал технических средств определенного назначения, повысить его надежность.
Технический результат, который может быть получен при осуществлении описываемого устройства, заключается в реализации устройства для измерения параметров профиля дорожного покрытия, повышении стабильности работы оборудования при упрощении обслуживания, получение достоверных характеристик измеряемых параметров.
Это достигается тем, что в известном устройстве для измерения геометрических параметров профиля дороги, которое содержит установленные в ряд на поперечной балке переднего бампера автомобиля излучатели с оптическими системами для подачи пучков лазерного света на поверхность дорожного покрытия, оптические приемники отраженных излучений, преобразователи отраженных излучений в аналоговые сигналы, преобразователи аналоговых сигналов, процессорный блок, программный комплекс, ЭВМ, датчики корректировки колебаний кузова автомобиля, датчики времени и пройденного пути, в соответствии с описываемым устройством оптическая система каждого излучателя выполнена в виде преобразователя пучка лазерного света в линию с образованием непрерывной линии по ширине дорожного покрытия, каждый оптический приемник отраженных излучений выполнен в виде камеры, преобразующей отраженные линейные излучения в аналоговые сигналы по форме профиля дороги, каждый преобразователь аналоговых сигналов выполнен в виде компаратора, выделяющего из аналогового сигнала часть, соответствующую отраженному излучению, и преобразующего эту часть аналогового сигнала в TTL-уровень, процессорный блок выполнен с возможностью суммирования сигналов TTL-уровня в заданные отрезки времени, при этом каждый компаратор связан с процессорным блоком и выполнен с возможностью обратной связи с ним, а каждая камера дополнительно связана с процессорным блоком с возможностью обратной связи с ним.
Сущность изобретения представлена на чертежах, где на фиг.1 показана блок-схема устройства для осуществления способа измерения геометрических параметров профиля дороги, на фиг.2 - график координат профиля поверхности дороги, на фиг.3 - график колейности, на фиг.4 - график микрошероховатости.
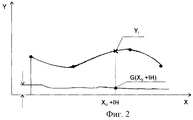
Описываемый способ измерения геометрических параметров профиля дороги в виде поперечного профиля дороги, колейности дорожного покрытия, шероховатости, продольной ровности, дефектов дорожного покрытия и их геометрических размеров включает подачу излучателями 1 на поверхность дорожного покрытия в поперечном его направлении в процессе движения автомобиля ряда отдельных излучений лазерного света с образованием непрерывной линии по ширине поверхности дорожного покрытия. Отраженные излучения лазерного света принимают оптическими приемниками, преобразуют в аналоговые сигналы, которые синхронизируют и суммируют в заданные отрезки времени. Из полученного аналогового сигнала выделяют части, соответствующие отраженному излучению по форме поперечного профиля дороги в виде непрерывной линии, преобразовывают эти части в TTL-уровень с выделением из него геометрических параметров профиля дороги в виде координат его точек, при этом размерные координаты поперечного профиля с заданным шагом, фиг.2, определяют по зависимости:
Yi = f(x0+ih)+g(x0+ih),
где f(x0+ih) - сплайн-функция, построенная по измеренным значениям, полученным путем наложения формы профиля на матрицу оптического приемника 2 и последующего их выделения;
x0 - начальная координата;
i - номер точки;
h - заданный шаг абсциссы профиля;
g(x) - функция, предназначенная для коррекции колебаний кузова автомобиля в процессе движения, определяемая по данным, поступающим с акселерометров;
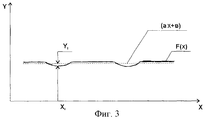
колейность покрытия, фиг.3, определяют по зависимости:

где f(x) - функция, описывающая профиль;
a, b - коэффициенты линейного преобразования, построенные по методу наименьших квадратов;
Е - заданная глубина колеи;
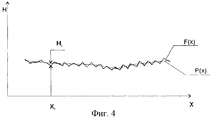
микрошероховатость поверхности в поперечнике, фиг.4, определяют в виде средней высоты микронеровностей поверхности по зависимости:

где hi - текущий размер микронеровности, определяемый как

где f(x) - функция, описывающая профиль поверхности;
Рn(x) - приближение функции полиномом Фурье;
n - степень полинома.
Yi = f(x0+ih)+g(x0+ih),
где f(x0+ih) - сплайн-функция, построенная по измеренным значениям, полученным путем наложения формы профиля на матрицу оптического приемника 2 и последующего их выделения;
x0 - начальная координата;
i - номер точки;
h - заданный шаг абсциссы профиля;
g(x) - функция, предназначенная для коррекции колебаний кузова автомобиля в процессе движения, определяемая по данным, поступающим с акселерометров;
колейность покрытия, фиг.3, определяют по зависимости:
где f(x) - функция, описывающая профиль;
a, b - коэффициенты линейного преобразования, построенные по методу наименьших квадратов;
Е - заданная глубина колеи;
микрошероховатость поверхности в поперечнике, фиг.4, определяют в виде средней высоты микронеровностей поверхности по зависимости:
где hi - текущий размер микронеровности, определяемый как
где f(x) - функция, описывающая профиль поверхности;
Рn(x) - приближение функции полиномом Фурье;
n - степень полинома.
При этом определяемые по заданным программам параметры профиля дороги привязывают к пройденному пути и корректируют в зависимости от колебаний кузова автомобиля в процессе его движения. Параметры профиля дороги вводят в базу данных и используют по мере необходимости.
Устройство для реализации описываемого способа содержит установленные в ряд на переднем бампере автомобиля излучатели 1 лазерного света с оптической системой, преобразующей световой цилиндрический пучок в линию. Излучатели 1 установлены с возможностью образования непрерывной световой линии по ширине дорожного покрытия. Устройство также включает установленные последовательно по числу излучателей 1 оптические приемники 2 отраженных излучений лазерного света, преобразователи 3 отраженных от дорожного покрытия излучений в аналоговые сигналы по форме профиля дороги, компараторы 4 для выделения из аналогового сигнала, поступающего с оптического приемника 2 той его части, которая соответствует отраженному потоку, и преобразование его в TTL-уровень, общий процессорный блок 5, ЭВМ 6. При этом процессорный блок 5 имеет обратную связь с каждым оптическим приемником 2, каждый из которых дополнительно связан непосредственно с процессорным блоком 5. Процессорный блок 5 связан с акселерометрами 7, предназначенными для коррекции колебаний кузова автомобиля, датчиком 8 пути, позволяющим привязывать определяемые параметры профиля дороги к координатам их места нахождения в соответствии с пройденным путем. Процессорный блок 5 синхронизирует и управляет в требуемые отрезки времени работу оптических приемников 2, обрабатывает TTL-сигналы при поступлении их с компараторов 4, суммирует их в заданные отрезки времени и выделяет из сигналов форму профиля дороги по всей ширине дорожного покрытия в виде координат его точек, управляет передачей результатов в ЭВМ. ЭВМ 6 накапливает, обрабатывает получаемые с процессорного блока 5 данные по аналитическим программам и определяет параметры профиля дороги в виде поперечного профиля дороги, колейности покрытия, шероховатости поверхности с определением коэффициента сцепления, продольной ровности, дефектов дорожного покрытия (выбоин, трещин и др.), их размеры.
Claims (2)
1. Способ измерения геометрических параметров профиля дороги, включающий подачу на поверхность дорожного покрытия в поперечном его направлении в процессе движения автомобиля ряда отдельных излучений лазерного света, прием отраженных излучений и их преобразование в аналоговые сигналы, передачу, преобразование аналоговых сигналов и определение по заданным программам геометрических параметров профиля дороги в виде поперечного профиля дороги, колейности дорожного покрытия, шероховатости, продольной ровности, дефектов дорожного покрытия и их геометрических размеров с привязкой параметров профиля дороги к пройденному пути, коррекцию геометрических параметров в зависимости от колебаний кузова автомобиля, накопление информации и обслуживание пользователей, отличающийся тем, что излучения подают в виде линий лазерного света с образованием непрерывной линии по ширине поверхности дорожного покрытия, аналоговые сигналы синхронизируют и суммируют в заданные отрезки времени, выделяют из них части, соответствующие отраженному излучению по форме поперечного профиля дороги в виде непрерывной линии, преобразовывают эти части в TTL-уровень с выделением из него геометрических параметров профиля дороги в виде координат его точек, при этом размерные координаты поперечного профиля с заданным шагом определяют по зависимости
Yi= f(xo+ih)+g(xo+ih),
где f(x0+ih) - сплайн-функция, построенная по измеренным значениям;
x0 - начальная координата;
i - номер точки;
h - заданный шаг;
g(x) - корректирующая колебаний кузова автомобиля в процессе движения,
колейность покрытия определяют по зависимости:

где f(x) - функция, описывающая поперечный профиль дорожного покрытия;
x - текущая координата;
a, b - коэффициенты линейного преобразования;
Е - заданная глубина колеи,
шероховатость поверхности в поперечнике определяют по зависимости

где hi - текущий размер микронеровности, определяемый как

где f(x) - функция, описывающая профиль поверхности, Рn(x) - приближение функции полиномом Фурье;
n - степень полинома.
Yi= f(xo+ih)+g(xo+ih),
где f(x0+ih) - сплайн-функция, построенная по измеренным значениям;
x0 - начальная координата;
i - номер точки;
h - заданный шаг;
g(x) - корректирующая колебаний кузова автомобиля в процессе движения,
колейность покрытия определяют по зависимости:
где f(x) - функция, описывающая поперечный профиль дорожного покрытия;
x - текущая координата;
a, b - коэффициенты линейного преобразования;
Е - заданная глубина колеи,
шероховатость поверхности в поперечнике определяют по зависимости
где hi - текущий размер микронеровности, определяемый как
где f(x) - функция, описывающая профиль поверхности, Рn(x) - приближение функции полиномом Фурье;
n - степень полинома.
2. Устройство для измерения геометрических параметров профиля дороги, содержащее установленные в ряд на поперечной балке переднего бампера автомобиля излучатели с оптическими системами для подачи пучков лазерного света на поверхность дорожного покрытия, оптические приемники отраженных излучений, преобразователи отраженных излучений в аналоговые сигналы, преобразователи аналоговых сигналов, процессорный блок, программный комплекс, ЭВМ, датчики корректировки колебаний кузова автомобиля, датчики времени и пройденного пути, отличающееся тем, что оптическая система каждого излучателя выполнена в виде преобразователя пучка лазерного света в линию с образованием непрерывной линии по ширине дорожного покрытия, каждый оптический приемник отраженных излучений выполнен в виде камеры, преобразующей отраженные линейные излучения в аналоговые сигналы по форме профиля дороги, каждый преобразователь аналоговых сигналов выполнен в виде компаратора, выделяющего из аналогового сигнала часть, соответствующую отраженному излучению, и преобразующего эту часть аналогового сигнала в TTL-уровень, процессорный блок выполнен с возможностью суммирования сигналов TTL-уровня в заданные отрезки времени, при этом каждый компаратор связан с процессорным блоком и выполнен с возможностью обратной связи с ним, а каждая камера дополнительно связана с процессорным блоком с возможностью обратной связи с ним.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2000106327/28A RU2201577C2 (ru) | 2000-03-16 | 2000-03-16 | Способ измерения геометрических параметров профиля дороги и устройство для его осуществления |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2000106327/28A RU2201577C2 (ru) | 2000-03-16 | 2000-03-16 | Способ измерения геометрических параметров профиля дороги и устройство для его осуществления |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2000106327A RU2000106327A (ru) | 2002-01-27 |
| RU2201577C2 true RU2201577C2 (ru) | 2003-03-27 |
Family
ID=20231844
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2000106327/28A RU2201577C2 (ru) | 2000-03-16 | 2000-03-16 | Способ измерения геометрических параметров профиля дороги и устройство для его осуществления |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2201577C2 (ru) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2311611C1 (ru) * | 2006-05-16 | 2007-11-27 | Открытое акционерное общество "Дорожный научно-исследовательский институт "Союздорнии"-ОАО "Союздорнии" | Способ оценки эксплуатационного состояния дорожной одежды с асфальтобетонным покрытием |
| RU2352899C2 (ru) * | 2005-05-26 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Способ калибровки автомобильных площадок |
| RU2352898C2 (ru) * | 2005-05-19 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Способ калибровки площадки стенда регулировки фар автотранспортных средств |
| RU2352900C2 (ru) * | 2005-05-26 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Способ калибровки автомобильных площадок регулировочных стендов |
| RU2352896C2 (ru) * | 2005-05-19 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Способ калибровки рабочей площадки стенда регулировки фар автотранспортных средств |
| RU2352897C2 (ru) * | 2005-05-19 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Устройство калибровки автомобильной площадки регулировочных стендов |
| RU2422306C1 (ru) * | 2010-01-11 | 2011-06-27 | Государственное образовательное учреждение высшего профессионального образования "Воронежская государственная лесотехническая академия" | Устройство для обнаружения неровностей дороги и автоматического управления тормозной системой автомобиля |
| CN112611344A (zh) * | 2020-11-30 | 2021-04-06 | 北京建筑大学 | 一种自主移动式平面度检测方法、设备及存储介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4928175A (en) * | 1986-04-11 | 1990-05-22 | Henrik Haggren | Method for the three-dimensional surveillance of the object space |
| RU2114391C1 (ru) * | 1996-09-23 | 1998-06-27 | Государственное предприятие "РОСДОРНИИ" | Способ определения кривизны и уклонов профиля поверхности дорожного покрытия в двух различных направлениях, преимущественно в направлении движения автомобиля и в поперечном ему направлении |
-
2000
- 2000-03-16 RU RU2000106327/28A patent/RU2201577C2/ru not_active IP Right Cessation
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4928175A (en) * | 1986-04-11 | 1990-05-22 | Henrik Haggren | Method for the three-dimensional surveillance of the object space |
| RU2114391C1 (ru) * | 1996-09-23 | 1998-06-27 | Государственное предприятие "РОСДОРНИИ" | Способ определения кривизны и уклонов профиля поверхности дорожного покрытия в двух различных направлениях, преимущественно в направлении движения автомобиля и в поперечном ему направлении |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2352898C2 (ru) * | 2005-05-19 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Способ калибровки площадки стенда регулировки фар автотранспортных средств |
| RU2352896C2 (ru) * | 2005-05-19 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Способ калибровки рабочей площадки стенда регулировки фар автотранспортных средств |
| RU2352897C2 (ru) * | 2005-05-19 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Устройство калибровки автомобильной площадки регулировочных стендов |
| RU2352899C2 (ru) * | 2005-05-26 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Способ калибровки автомобильных площадок |
| RU2352900C2 (ru) * | 2005-05-26 | 2009-04-20 | Открытое акционерное общество "АВТОВАЗ" | Способ калибровки автомобильных площадок регулировочных стендов |
| RU2311611C1 (ru) * | 2006-05-16 | 2007-11-27 | Открытое акционерное общество "Дорожный научно-исследовательский институт "Союздорнии"-ОАО "Союздорнии" | Способ оценки эксплуатационного состояния дорожной одежды с асфальтобетонным покрытием |
| RU2311611C9 (ru) * | 2006-05-16 | 2008-02-10 | Открытое акционерное общество "Дорожный научно-исследовательский институт "Союздорнии"-ОАО "Союздорнии" | Способ оценки эксплуатационного состояния дорожной одежды с асфальтобетонным покрытием |
| RU2422306C1 (ru) * | 2010-01-11 | 2011-06-27 | Государственное образовательное учреждение высшего профессионального образования "Воронежская государственная лесотехническая академия" | Устройство для обнаружения неровностей дороги и автоматического управления тормозной системой автомобиля |
| CN112611344A (zh) * | 2020-11-30 | 2021-04-06 | 北京建筑大学 | 一种自主移动式平面度检测方法、设备及存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5405477B2 (ja) | 車両タイヤの圧力とプロファイル深さを決定する方法 | |
| US4866642A (en) | Method and apparatus for determining the diameter of rail vehicle wheels | |
| US6559936B1 (en) | Measuring angles of wheels using transition points of reflected laser lines | |
| EP3141449B1 (en) | Rail profile monitoring, e.g. geometry of the frogs | |
| US8625106B2 (en) | Method for optically scanning and measuring an object | |
| RU2201577C2 (ru) | Способ измерения геометрических параметров профиля дороги и устройство для его осуществления | |
| GB2241061A (en) | Light scanning system | |
| CA2561923A1 (en) | Measuring apparatus and method in a distribution system | |
| AU2018425917A1 (en) | Apparatus and method for calculating wooden crosstie plate cut measurements and rail seat abrasion measurements based on rail head height | |
| KR20190125441A (ko) | 차량에서 기울기 신호의 결정 장치 및 그 방법 | |
| US11247705B2 (en) | Train wheel measurement process, and associated system | |
| US10514447B2 (en) | Method for propagation time calibration of a LIDAR sensor | |
| DE502004004889D1 (de) | Verfahren und messvorrichtung zur berührungslosen messung von winkeln oder winkeländerungen an gegenständen | |
| JP4633794B2 (ja) | 少なくとも一部が透明な媒体の厚さを測定するための光学装置 | |
| EP1256780B1 (en) | A process for identifying a specific light signal in a goniometer from among other potentially disturbing light signals | |
| EP3152518A1 (en) | Device and method for determining at least one parameter characteristic of at least one component of a vehicle in the scope of a diagnostic, main¢ tenance or monitoring operation | |
| CN104321614A (zh) | 用于测定测量站的至少一条路轨的定向的方法以及用于执行该方法的设备 | |
| RU2000106327A (ru) | Способ измерения геометрических параметров профиля дороги и устройство для его осуществления | |
| CN110632567B (zh) | 用于初始校准车辆的驾驶员辅助系统的传感器的方法 | |
| JP2007010405A (ja) | タイヤ動的接地形状測定方法及び装置 | |
| CN1143751A (zh) | 基于微功率脉冲雷达的车轮探测器 | |
| JPH0660807B2 (ja) | 光の中心位置の高精度計測方法 | |
| RU2266226C2 (ru) | Способ мониторинга параметров колесной пары и ее положения относительно рельсового пути | |
| JPH06307937A (ja) | 連続鋳造機のロールアライメントの測定装置及び測定方法 | |
| JPH10132523A (ja) | 物体表面高さ測定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| NF4A | Reinstatement of patent | ||
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20050317 |
|
| NF4A | Reinstatement of patent | ||
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20070317 |