RU2419476C1 - Способ спуска с наклонных поверхностей (варианты) - Google Patents
Способ спуска с наклонных поверхностей (варианты) Download PDFInfo
- Publication number
- RU2419476C1 RU2419476C1 RU2010125946/12A RU2010125946A RU2419476C1 RU 2419476 C1 RU2419476 C1 RU 2419476C1 RU 2010125946/12 A RU2010125946/12 A RU 2010125946/12A RU 2010125946 A RU2010125946 A RU 2010125946A RU 2419476 C1 RU2419476 C1 RU 2419476C1
- Authority
- RU
- Russia
- Prior art keywords
- braking
- wheel
- contact
- brake
- inclined surfaces
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 22
- 230000035939 shock Effects 0.000 claims abstract description 23
- 239000006096 absorbing agent Substances 0.000 claims abstract description 22
- 230000006835 compression Effects 0.000 claims description 5
- 238000007906 compression Methods 0.000 claims description 5
- 238000000926 separation method Methods 0.000 claims description 5
- 238000005096 rolling process Methods 0.000 abstract description 6
- 230000000694 effects Effects 0.000 abstract description 4
- 230000009194 climbing Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 230000036316 preload Effects 0.000 description 2
- 241000282472 Canis lupus familiaris Species 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 238000005086 pumping Methods 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images



Landscapes
- Motorcycle And Bicycle Frame (AREA)
- Footwear And Its Accessory, Manufacturing Method And Apparatuses (AREA)
Abstract
Предлагаемая конструкция относится к области спортивно-туристического инвентаря, а именно к роликовым конькам, предназначенным для спуска с наклонных поверхностей. Изобретение направлено на обеспечение возможности при спуске совершать непрерывные прыжки (шаги) и выбирать подходящие места для приземления (прокатывания) с автоматическим плавным торможением, что делает возможным спуски по более крутым поверхностям с сложным рельефом. Способ спуска с наклонных поверхностей, включающий использование роликовых коньков, оснащенных амортизатором, устройством торможения, отличающийся тем, что вокруг колес роликовых коньков располагают конвейерную ленту или гусеницу, обладающую свойствами плавного торможения посредством использования педали, обеспечивающей включение плавного торможения посредством тормоза при контакте роликового конька с поверхностью, а при разрыве этого контакта - возвращающее тормозное устройство в первоначальное состояние. Другой вариант подразумевает, что вместо конвейерной ленты или гусеницы может быть использовано колесо или обруч оснащенный(ое) амортизатором, устройством торможения, отличающийся тем, что оно (он) обладает свойствами плавного торможения посредством использования педали, обеспечивающей включение плавного торможения посредством тормоза при контакте колеса с поверхностью, а при разрыве этого контакта - возвращающее тормозное устройство в первоначальное состояние. 2 н. и 6 з.п. ф-лы, 5 ил.
Description
Изобретение относится к области спортивно-туристического инвентаря, а именно к способам спуска с наклонных поверхностей, и может быть использовано в роликовых коньках и езде на одноколесных опорах.
Из уровня техники известны роликовые коньки (патенты FR 2633524, FR 2859920, US 5961131), которые отличает наличие амортизаторов.
Недостатком решения является то, что такие роликовые коньки не могут быть использованы для спусков с наклонной поверхности, поскольку не обладают возможностью плавного торможения.
Из уровня техники известны роликовые коньки (патент RU 35076U), включающие несущую платформу с элементами крепления обуви и снабженную колесами-роликами, отличающиеся тем, что в конструкцию роликовых коньков дополнительно введен механический привод, приводимый в действие нажатием стопы ноги на форму-рычаг, включающий амортизатор-ограничитель, возвратную пружину и зубчатую рейку, которая передает качательное движение платформы-рычага через редуктор шестерне ведущего колеса-ролика, снабженного обгонным механизмом, состоящим из храповика и собачек. Недостатком решения является то, что такие роликовые коньки не могут быть использованы для спусков с наклонной поверхности, поскольку не обладают возможностью плавного торможения.
Из уровня техники известны роликовые коньки (патент RU 70145U), каждый из которых содержит платформу, на верхней стороне которой установлен узел крепления обуви конькобежца, а на нижней продольно закреплены, по меньшей мере, два профильных ролика качения по замкнутой направляющей, замкнутая направляющая для роликов платформы, узел поджатия роликов к направляющей, отличающиеся тем, что замкнутая направляющая для роликов платформы выполнена в виде жесткого круглого обруча, с профилированной под ролики внутренней поверхностью, размещенного верхней частью с наружной стороны ноги конькобежца, а узел поджатия роликов платформы к направляющей выполнен, например, в виде пружинного амортизатора, закрепленного одним концом на оси платформы с возможностью прокачки в плоскости качения, а другим через дополнительный профильный ролик поджат к обручу, кроме того, в каждом коньке введен узел фиксации амортизатора относительно голени конькобежца, выполненный, например, в виде ремня, скрепленного с амортизатором, для пристегивания последнего к подколенной части голени конькобежца.
Недостатком решения является то, что такие роликовые коньки не могут быть использованы для спусков с наклонной поверхности, поскольку не обладают возможностью плавного торможения.
Наиболее близким решением являются роликовые коньки (патент RU 71896U), каждый из которых содержит платформу, на верхней стороне которой установлен узел крепления обуви конькобежца, а на нижней продольно закреплены, по меньшей мере, два профильных ролика качения по замкнутой направляющей в виде обруча с профилированной под ролики внутренней поверхностью, размещенного верхней частью с наружной стороны ноги конькобежца, узел поджатия роликов к направляющей, узел фиксации амортизатора относительно голени конькобежца, отличающиеся тем, что каждый конек снабжен узлом торможения обруча.
Предложенную конструкцию роликовых коньков отличает наличие тормозного устройства с одновременным повышением спортивных возможностей пользователей при спусках.
Недостатком решения является сложность конструкции, ее малая надежность и потребность пользователя самостоятельно регулировать плавность торможения, что вынуждает пользователя быть в постоянном напряжении и внимании с целью регулировать торможение, в то время когда он большую часть внимания должен уделять выбору относительно ровных мест для приземления.
Технический результат: обеспечивается возможность при спуске совершать непрерывные прыжки (шаги) и выбирать подходящие места для приземления (прокатывания) с автоматическим плавным торможением, что делает возможным спуски по более крутым поверхностям с сложным рельефом.
Это достигается за счет упрощения конструкции роликовых коньков при спуске, повышения надежности управления ими и обеспечения автоматического плавного торможения при спуске без потребности управления тормозами со стороны пользователя.
Заявленный технический результат достигается за счет того, что способ спуска с наклонных поверхностей, включающий использование роликовых коньков, оснащенных амортизатором тормоза, устройством торможения, отличающийся тем, что вокруг колес роликовых коньков располагают конвейерную ленту или гусеницу, обладающую свойствами плавного торможения посредством использования педали, обеспечивающей включение плавного торможения посредством тормоза при контакте роликового конька с поверхностью, а при разрыве этого контакта, возвращающее тормозное устройство в первоначальное состояние.
Свойства плавного торможения способа отличает то, что при шаге (приземлении) и контакте гусеницы или ленты с наклонной поверхностью коэффициент сопротивления свободному ходу гусеницы возрастает со своего минимального значения до полного прекращения движения гусеницы относительно конька под действием кинетической энергии шага, а при разрыве контакта гусеницы или ленты с поверхностью (отрыве ноги с коньком от поверхности), коэффициент сопротивления свободному ходу гусеницы возвращается к своему минимальному значению.
Кроме того, используют амортизатор тормоза в качестве устройства, обеспечивающего плавное торможение с плавно нарастающим сопротивлением и этим обеспечивающее прокатывание конька на определенную длину.
А в качестве тормоза используют спиральную пружину или пружину сжатия, оснащенную роликом и тросиком.
Другой вариант реализации способа подразумевает, что способ спуска с наклонных поверхностей, включающий использование колеса или обруча, оснащенных амортизатором тормоза, устройством торможения, крепящегося к коньку или ботинку пользователя, отличающийся тем, что колесо или обруч выполняют обладающим свойствами плавного торможения посредством использования педали, обеспечивающей включение плавного торможения посредством тормоза при контакте колеса с поверхностью, а при разрыве этого контакта - возвращающее тормозное устройство в первоначальное состояние.
Кроме того, свойства плавного торможения способа отличает то, что при шаге (приземлении) и контакте гусеницы, или ленты, или колеса, или обруча с наклонной поверхностью коэффициент сопротивления свободному ходу гусеницы, или ленты, или колеса, или обруча возрастает со своего минимального значения до полного прекращения движения гусеницы, или ленты, или колеса, или обруча относительно конька под действием кинетической энергии шага, а при разрыве контакта гусеницы, или ленты, или колеса, или обруча с поверхностью (отрыве ноги с коньком от поверхности) коэффициент сопротивления свободному гусеницы, или ленты, или, колеса, или обруча возвращается к своему минимальному значению. Кроме того, используют амортизатор тормоза в качестве устройства, обеспечивающего плавное торможение с плавно нарастающим сопротивлением и этим обеспечивающее прокатывание конька на определенную длину.
Другой вариант реализации способа подразумевает, что способ спуска с наклонных поверхностей, включающий использование колеса или обруча, крепящегося к коньку или ботинку пользователя, оснащенных устройством торможения колеса или обруча, отличающийся тем, что при колесе или обруче располагают упор для крепления ноги пользователя, который оснащают педалью, активирующей натяжение спиральной пружины, размещаемой внутри обода колеса или обруча так, что в момент касания колеса поверхности пружина начинает скручиваться и трением гасит усилие вращения колеса, а в момент отрыва колеса от поверхности колесо освобождается и возвращается в начальное состояние. Причем при шаге (приземлении) и контакте колеса или обруча с наклонной поверхностью коэффициент сопротивления свободному ходу колеса или обруча возрастает со своего минимального значения до полного прекращения движения колеса или обруча относительно конька под действием кинетической энергии шага, а при разрыве контакта колеса или обруча с поверхностью (отрыве ноги с коньком от поверхности) коэффициент сопротивления свободному ходу колеса или обруча возвращается к своему минимальному значению. Кроме того, используют амортизатор тормоза в качестве устройства, обеспечивающего плавное торможение с плавно нарастающим сопротивлением и этим обеспечивающее прокатывание конька на определенную длину. В качестве тормоза используют спиральную пружину или пружину сжатия, оснащенную роликом и тросиком.
Краткое описание чертежей
На Фиг.1 показаны варианты возможного конструктивного устройства конька, реализующего способ, где 1 - амортизатор тормоза, 2 - педаль, 3 - тормозное устройство (дисковый тормоз), 4 - гусеница, 5 - устройство, обеспечивающее стопорение движения гусеницы в другую сторону, 6 - компенсатор натяжения гусеницы, 7 - тросик.
На Фиг.2 показана физика процесса спуска, где 8 - роликовые колеса.
На Фиг.3 показан тормозной путь при спуске.
На Фиг.4 показан принцип спуска на колесе, где 9 - колесо, 10 - храповой механизм (устройство, обеспечивающее стопорение движения колеса в другую сторону), 11 - прижимной ролик, 12 - ось колеса (не вращается), 13 - место крепления оси (12), 14 - барабан намотки тросика (15), 16 - прижимной ролик, 17 - тормозной рычаг, 18 - пружина, амортизатор тормоза - 19.
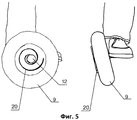
На Фиг.5 показан принцип торможения колеса с использованием спиральной пружины вместо дискового тормоза (3) и амортизатора (19), где 20 - спиральная пружина.
Способ может быть реализован на основе устройства (см. Фиг.1), в котором вокруг колес роликовых коньков располагают конвейерную ленту или гусеницу (4), обладающую свойствами плавного торможения посредством использования педали (2), обеспечивающей включение плавного торможения посредством тормоза (3) при контакте роликового конька с поверхностью, а при разрыве этого контакта - возвращающее тормозное устройство (3) в первоначальное состояние.
Поскольку используется лента или гусеница, предпочтительно применять устройство (5), обеспечивающее стопорение движения гусеницы в другую сторону, компенсатор натяжения гусеницы (6).
При использовании тормоза (3), независимого от нажатия педали (2), задействуют тросик (7), с помощью которого усилие стопора передается на тормоз (3).
При спуске с горы или любой другой наклонной плоскости человек совершает шаги или прыжки, которые гасятся (демпфируются) (при наступании/приземлении) путем постепенного торможения (см. Фиг.2).
В фазе (Фиг.2(a)) при шаге (приземлении) и контакте гусеницы роликового конька (или колеса) с поверхностью коэффициент сопротивления свободному ходу гусеницы ds возрастает на отрезке X с своего минимального значения ds min до ds max - полного прекращения движения гусеницы относительно конька (под действием кинетической энергии шага F).
В фазе (Фиг.2(б)) при подъеме ноги (разрыве контакта гусеницы с поверхностью) значение ds становится равным ds min, после чего фазы повторяются.
Достигаемый эффект реализуется благодаря следующим отличительным особенностям.
Используется педаль - устройство, обеспечивающее включение постепенного торможения при контакте конька с поверхностью, и при разрыве этого контакта - возвращающее тормозное устройство в первоначальное состояние.
Используется амортизатор тормоза - устройство, обеспечивающее плавное торможение (торможение с плавно нарастающим сопротивлением и этим обеспечивающее прокатывание конька на длину X) (см. Фиг.3).
Используется тормозное устройство.
Педаль, тормозное устройство и его свойства плавного торможения (либо амортизатор тормоза) обеспечивают вместе автоматическое плавное торможение при спуске без потребности управления тормозами со стороны пользователя.
Другой вариант реализации способа подразумевает, что при спуске используют колесо, крепящееся к коньку или ботинку пользователя (см. Фиг.4).
В момент касания колеса (9) поверхности педаль (2) нажимается, в результате чего прижимные ролики (11) и (16) вступают в контакт, тросик (15) наматывается на барабан (14), и в результате чего срабатывает тормозной рычаг (17), активирующий дисковый тормоз (3). В момент отрыва колеса от поверхности прижимные ролики (11) и (16) теряют контакт, в результате чего барабан (14) под действием пружины разматывается, освобождая тормозной рычаг (17), который деактивирует тормоз (3).
Поскольку используется колесо, предпочтительно применять устройство (10), обеспечивающее стопорение движения колеса в другую сторону.
Также вместо дискового тормоза (3) и амортизатора (19) можно использовать для плавного торможения пружину (20) (см. Фиг.5) или пружину сжатия, оснащенную тросиком и роликом. В момент касания колеса (9) поверхности пружина (20) начинает скручиваться и трением гасит усилие вращения колеса.
В момент отрыва колеса от поверхности колесо (9) освобождается и возвращается в начальное состояние.
За счет исключения потребности в использовании ручного тормоза и длинных тросов с механическими приводами, ведущих от колес к рукам пользователя, обеспечивается упрощение конструкции роликовых коньков и колеса (обруча) и повышение надежности управления ими. Кроме того, достигается эффект передвижения большими шагами (прыжками), позволяющий испытать конькобежцу ощущения, недостижимые в реализованных ранее моделях роликовых коньков, а также то, что конькобежец прокатывается по поверхности относительно на небольшую длину X, а остальное время находится в прыжке, позволяет ему выбрать достаточное место для приземления (прокатывания) даже в условиях сложного рельефа местности, что делает возможным освоить новые места катания с сложным рельефом и наклоном, ранее оцененные как непригодные.
Claims (8)
1. Способ спуска с наклонных поверхностей, включающий использование роликовых коньков, оснащенных амортизатором тормоза, устройством торможения, отличающийся тем, что вокруг колес роликовых коньков располагают конвейерную ленту или гусеницу, обладающую свойствами плавного торможения посредством использования педали, обеспечивающей включение плавного торможения посредством тормоза при контакте роликового конька с поверхностью, а при разрыве этого контакта возвращающее тормозное устройство - в первоначальное состояние.
2. Способ спуска с наклонных поверхностей по п.1, отличающийся тем, что при шаге (приземлении) и контакте гусеницы или ленты с наклонной поверхностью коэффициент сопротивления свободному ходу гусеницы возрастает со своего минимального значения до полного прекращения движения гусеницы относительно конька под действием кинетической энергии шага, а при разрыве контакта гусеницы или ленты с поверхностью (отрыве ноги с коньком от поверхности) коэффициент сопротивления свободному ходу гусеницы возвращается к своему минимальному значению.
3. Способ спуска с наклонных поверхностей по п.1 или 2, отличающийся тем, что используют амортизатор тормоза в качестве устройства, обеспечивающего плавное торможение с плавно нарастающим сопротивлением и этим обеспечивающее прокатывание конька на определенную длину.
4. Способ спуска с наклонных поверхностей по п.1 или 2, отличающийся тем, что в качестве тормоза используют спиральную пружину или пружину сжатия, оснащенную роликом и тросиком.
5. Способ спуска с наклонных поверхностей, включающий использование колеса или обруча, оснащенных амортизатором тормоза, устройством торможения, крепящегося к коньку или ботинку пользователя, отличающийся тем, что колесо или обруч выполняют обладающим свойствами плавного торможения посредством использования педали, обеспечивающей включение плавного торможения посредством тормоза при контакте колеса с поверхностью, а при разрыве этого контакта возвращающее тормозное устройство, в первоначальное состояние.
6. Способ спуска с наклонных поверхностей по п.5, отличающийся тем, что при шаге (приземлении) и контакте колеса или обруча с наклонной поверхностью коэффициент сопротивления свободному ходу колеса или обруча возрастает со своего минимального значения до полного прекращения движения колеса или обруча относительно конька под действием кинетической энергии шага, а при разрыве контакта колеса или обруча с поверхностью (отрыве ноги с коньком от поверхности) коэффициент сопротивления свободному ходу колеса или обруча возвращается к своему минимальному значению.
7. Способ спуска с наклонных поверхностей по п.5 или 6, отличающийся тем, что используют амортизатор тормоза в качестве устройства, обеспечивающего плавное торможение с плавно нарастающим сопротивлением и этим обеспечивающее прокатывание конька на определенную длину.
8. Способ спуска с наклонных поверхностей по п.5 или 6, отличающийся тем, что в качестве тормоза используют спиральную пружину или пружину сжатия, оснащенную роликом и тросиком.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2010125946/12A RU2419476C1 (ru) | 2010-06-25 | 2010-06-25 | Способ спуска с наклонных поверхностей (варианты) |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2010125946/12A RU2419476C1 (ru) | 2010-06-25 | 2010-06-25 | Способ спуска с наклонных поверхностей (варианты) |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2419476C1 true RU2419476C1 (ru) | 2011-05-27 |
Family
ID=44734824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2010125946/12A RU2419476C1 (ru) | 2010-06-25 | 2010-06-25 | Способ спуска с наклонных поверхностей (варианты) |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2419476C1 (ru) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2067480C1 (ru) * | 1990-06-07 | 1996-10-10 | Евгений Васильевич Шкулев | Лыжероллеры |
| RU2112575C1 (ru) * | 1992-10-08 | 1998-06-10 | Вюртнер Хольгер | Полозковый спортивный снаряд или полозковое транпортное средство |
| RU71896U1 (ru) * | 2007-11-08 | 2008-03-27 | Дмитрий Константинович Колбасников | Роликовые коньки |
| CN101264382A (zh) * | 2007-03-16 | 2008-09-17 | 玉山江·依底力斯 | 行走鞋 |
| CN201419007Y (zh) * | 2009-04-13 | 2010-03-10 | 吴少华 | 一种跷步轮 |
-
2010
- 2010-06-25 RU RU2010125946/12A patent/RU2419476C1/ru not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2067480C1 (ru) * | 1990-06-07 | 1996-10-10 | Евгений Васильевич Шкулев | Лыжероллеры |
| RU2112575C1 (ru) * | 1992-10-08 | 1998-06-10 | Вюртнер Хольгер | Полозковый спортивный снаряд или полозковое транпортное средство |
| CN101264382A (zh) * | 2007-03-16 | 2008-09-17 | 玉山江·依底力斯 | 行走鞋 |
| RU71896U1 (ru) * | 2007-11-08 | 2008-03-27 | Дмитрий Константинович Колбасников | Роликовые коньки |
| CN201419007Y (zh) * | 2009-04-13 | 2010-03-10 | 吴少华 | 一种跷步轮 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101122520B1 (ko) | 짚 트렉 시스템 | |
| US9381926B2 (en) | Rider controlled zip line trolley brake system | |
| US7441633B2 (en) | Apparatus for automatic brake of walking support machine | |
| US8118319B2 (en) | Twisted structure for a skateboard | |
| US20120145498A1 (en) | Braking system for a zip line | |
| CN203714110U (zh) | 滑板车擦地式刹车装置 | |
| JPS59186574A (ja) | ロ−ラスケ−ト | |
| CN102837797A (zh) | 自行车的转矩驱动的自动变速设备 | |
| US5860492A (en) | Hand-activated brake and method | |
| RU2419476C1 (ru) | Способ спуска с наклонных поверхностей (варианты) | |
| CN103372301A (zh) | 用于轮滑鞋的制动机构 | |
| US9205321B2 (en) | Snowboard binding and braking system | |
| KR101486145B1 (ko) | 빠르게 걷는 신발 | |
| KR100932682B1 (ko) | 풋 바이크 | |
| CN101274136A (zh) | 滑雪板减速器 | |
| CN101385895A (zh) | 室内攀岩安全装置 | |
| JP2003299764A (ja) | 歩行の加速補助型スポーツ用具 | |
| KR20160118697A (ko) | 제동 및 견인기능이 부가된 공중 활강 체험시설 | |
| KR100985732B1 (ko) | 보드의 제동장치 | |
| JPH1133238A (ja) | 滑走飛行遊戯装置 | |
| SK282622B6 (sk) | Koliesková lyža | |
| KR200392906Y1 (ko) | 구름판 | |
| CN113318422A (zh) | 一种与步行及跑步相吻合的仿生自行鞋 | |
| EP3329967B1 (fr) | Systeme d'evacuation utilisant un element textile de diametre variable | |
| RU2010584C1 (ru) | Роликовые коньки |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20120626 |