WO2020002223A1 - Primärmessvorrichtung zum messen einer aktuellen wirkleistung - Google Patents
Primärmessvorrichtung zum messen einer aktuellen wirkleistung Download PDFInfo
- Publication number
- WO2020002223A1 WO2020002223A1 PCT/EP2019/066655 EP2019066655W WO2020002223A1 WO 2020002223 A1 WO2020002223 A1 WO 2020002223A1 EP 2019066655 W EP2019066655 W EP 2019066655W WO 2020002223 A1 WO2020002223 A1 WO 2020002223A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- current
- power
- voltage
- value
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R21/00—Arrangements for measuring electric power or power factor
- G01R21/001—Measuring real or reactive component; Measuring apparent energy
- G01R21/002—Measuring real component
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/12—Inductive energy transfer
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/10—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling
- H02J50/12—Circuit arrangements or systems for wireless supply or distribution of electric power using inductive coupling of the resonant type
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/02—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries for charging batteries from AC mains by converters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R21/00—Arrangements for measuring electric power or power factor
- G01R21/06—Arrangements for measuring electric power or power factor by measuring current and voltage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R21/00—Arrangements for measuring electric power or power factor
- G01R21/133—Arrangements for measuring electric power or power factor by using digital technique
- G01R21/1331—Measuring real or reactive component, measuring apparent energy
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R25/00—Arrangements for measuring phase angle between a voltage and a current or between voltages or currents
- G01R25/04—Arrangements for measuring phase angle between a voltage and a current or between voltages or currents involving adjustment of a phase shifter to produce a predetermined phase difference, e.g. zero difference
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R35/00—Testing or calibrating of apparatus covered by the other groups of this subclass
- G01R35/04—Testing or calibrating of apparatus covered by the other groups of this subclass of instruments for measuring time integral of power or current
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J2105/00—Networks for supplying or distributing electric power characterised by their spatial reach or by the load
- H02J2105/30—Networks for supplying or distributing electric power characterised by their spatial reach or by the load the load networks being external to vehicles, i.e. exchanging power with vehicles
- H02J2105/33—Networks for supplying or distributing electric power characterised by their spatial reach or by the load the load networks being external to vehicles, i.e. exchanging power with vehicles exchanging power with road vehicles
- H02J2105/37—Networks for supplying or distributing electric power characterised by their spatial reach or by the load the load networks being external to vehicles, i.e. exchanging power with vehicles exchanging power with road vehicles exchanging power with electric vehicles [EV] or with hybrid electric vehicles [HEV]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/12—Electric charging stations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
Definitions
- the invention relates to the technical field of inductive charging.
- the present invention relates to a primary measuring device and a method for calibrating a measured value.
- a system for inductive energy transfer can be used if the charging should be done contactless.
- an alternating magnetic field is generated in the frequency range of 25 ... 150 kHz. It should be noted that outside of this frequency band, the limit values for the emission of electromagnetic waves are defined by internationally applicable standards. Because although in principle a magnetic field is used for energy transmission, due to the fact that the magnetic field changes inherently, it is an electromagnetic wave. Because of the slow
- electromagnetic wave however, has a wavelength of several kilometers.
- a GPM Round Pad Module
- CPM Car Pad
- GPM and CPM form a transformer for coupling and power transmission.
- Coupling elements to each other is via a positioning signal e.g. RKS (Remote Keyless Entry System) measured and set.
- RKS Remote Keyless Entry System
- a primary measuring device and a method for calibrating a measured value are specified.
- a primary measuring device for measuring a current active power in a primary circuit is a
- Energy transmission system described comprising an evaluation device and a calibration device, wherein the evaluation device has a measurement connection for detecting a current, a voltage and a measured phase shift between current and voltage in the primary circuit.
- the evaluation device and the calibration device are connected to one another and the evaluation device is further set up to perform a power measurement by evaluating the detected current and the detected voltage.
- the calibration device is set up to correct the detected current and / or the detected voltage via the cos () value of the detected phase shift between the detected current and the detected voltage and / or via a holding time.
- the evaluation device is set up to calculate a power value with the corrected value of the detected current and / or the corrected value of the detected voltage.
- the calibration device is also set up to provide the calculated power value as the current active power.
- a method for determining a calibration factor for a measurement of active power in a primary circuit of an energy transmission system is specified. This method has the setting of a predefinable working point by setting a predefinable one
- a method for calibrating a measured value has the detection of a current, a voltage and a measured phase shift between current and voltage in a primary circuit.
- the method includes performing a power measurement by evaluating the detected current and the detected voltage, correcting the detected current and / or the detected voltage via the cos () value of the detected phase shift between the detected current and the detected voltage and / or via a Hold on.
- the method has the calculation of a power value with the corrected value of the detected current and / or the corrected value of the detected voltage and the provision of the calculated power value as the current active power.
- a computer-readable storage medium is specified in which a program is stored which, when executed by a processor, executes one of the inventive methods.
- a control device or a controller can use such a processor.
- a floppy disc, hard disk, USB (Universal Serial Bus) storage device, RAM (Random Access Memory), ROM (Read Only Memory) or EPROM (Erasable Programmable Read Only Memory) may be used as a computer-readable storage medium.
- An ASIC (application-specific integrated circuit) or an FPGA (field-programmable gate array) can also be used as a storage medium, as can SSD (solid-state drive) technology or a flash-based storage medium.
- a web server or a cloud can also be used as a storage medium.
- Computer-readable storage medium may also be viewed as a communication network, such as the Internet, which may allow program code to be downloaded. It can be a radio-based network technology and / or one
- wired network technology can be used.
- a program element is also specified which, when executed by a processor, carries out one of the inventive methods.
- the corrected value of the detected current results from the detected value of the current, taking into account a delay value that has been derived from the detected phase shift.
- the calibration is carried out for a setpoint value provided for a power control.
- the primary measuring device has a sample hold device, the sample hold device for
- the sample hold device is set up to take a runtime into account in the hardware of the primary measuring device.
- a ground pad module with a primary measuring device is specified.
- FIG. 1 shows an inductive charging system according to an exemplary embodiment of the present invention.
- FIG. 2 shows a block diagram of an inductive charging system according to one
- FIG 3 shows the inductive charging system as a control loop according to an exemplary embodiment of the present invention.
- FIG. 4 shows a simplified illustration of the controlled system from FIG. 3 according to an exemplary embodiment of the present invention.
- FIG. 6 shows a flowchart for an inductive charging process according to one
- FIG. 7 shows a flow diagram for the loading phase including the startup according to an exemplary embodiment of the present invention.
- FIG. 8 shows a diagram of a three-dimensional representation of transmitted power versus frequency and duty cycle according to an exemplary embodiment of the present invention.
- 9 shows a diagram of a three-dimensional representation of the efficiency versus frequency and the duty cycle according to an exemplary embodiment of the present invention.
- FIG. 10 shows a linearized equivalent circuit diagram of the ICS system from FIG. 2 according to an exemplary embodiment of the present invention.
- FIG. 1 1 shows a detailed view of the measuring device with the primary measuring device according to an exemplary embodiment of the present invention.
- FIG. 13 shows a flowchart of a method for calibrating a measured value according to an exemplary embodiment of the present invention.
- FIG. 14 shows a timing diagram for the control of a converter for generating a PWM at the input of a filter according to an exemplary embodiment of the present invention.
- FIG. 1 shows an inductive charging system 100 according to an example
- Embodiment of the present invention shows a side view of a system for contactless charging of an electric vehicle.
- a car pad module (CPM) 104 which serves to supply the vehicle 102 with power.
- a magnetic field is used for the transmission of the energy, the magnetic field being provided inductively by a ground pad module (GPM) 105 which is permanently mounted on a ground 103.
- the energy required for charging is taken from the main connection 107, which is both
- Alternating current (AC) and direct current (DC) can be.
- a separate connection 101 is used for communication between CPM 104 and GPM 105, which
- radio protocol such as WLAN (Wireless LAN) or NFC.
- This connection can be used as a feedback channel 101 or as a communication channel 101, via which the CPM 104 and GPM 105 can exchange information.
- Both the magnetic field for energy transmission 106 and the radio signal 101 are
- FIG. 2 shows a block diagram of an inductive charging system 100 according to an exemplary embodiment of the present invention.
- a system for inductive energy transmission for contactless charging of an electric vehicle is considered.
- an alternating magnetic field 106 is generated in the frequency range from 25 to 150 kHz, for example. It should be noted that outside of this frequency band, the limit values for the emission
- electromagnetic waves are defined by internationally applicable standards. In order to comply with these limit values, it is crucial that the alternating magnetic field 106 works with the fundamental oscillation in the range 25 ... 150 kHz and contains only very small harmonics.
- the efficiency of the power transmission should be as high as possible and therefore electronic switches within an inverter 201, for example by means of MOSFETs, IGBTs, generates a square-wave signal with the fundamental frequency of the alternating magnetic field, because this results in very low losses.
- the square wave signal contains considerable harmonics. These harmonics can be filtered out very well with a filter 200, for example an LC filter 200.
- the filter 200 can be designed differently.
- a fourth order filter 200 is shown by way of example in FIG. 2, but other arrangements of capacitors and coils are also possible.
- the input current l in, and the input voltage U a are at the input 206 of the filter 200 or U in the art.
- the filter 200 has two input coils La1 and La2 connected in series and the filter input capacitor Ca as well as the series connected output coils Lb1 and Lb2 and the filter output capacitor Cb.
- a single input coil La can also be used.
- a single input coil Lb can also be used.
- Two (two-pole) components are connected in series if they only have one connection in common and they are connected in parallel if they are connected to each other at both connections.
- the input coils La1 and La2 are connected directly to the output of the inverter 201.
- Here may directly mean that no further component
- the output coils Lb1 and Lb2 at the output 207 of the filter 200 are connected directly to the coils La1 and La2 and to the primary resonance circuit 202.
- the primary resonance circuit 202 is connected to the
- the primary resonance circuit 202 has the primary resonance coil L1 and the primary resonance capacitor C1.
- the primary resonance circuit 202 converts the current 11 and the voltage U1 into the alternating magnetic field 106.
- the alternating magnetic field 106 couples with a coupling factor k into the secondary resonance circuit 203 and transmits the energy from the primary circuit through resonant and inductive energy transfer to the secondary circuit 203.
- the secondary resonance circuit 203 has the secondary resonance coil L2 and the
- Secondary resonance capacitor C2 Since the secondary resonance circuit 203 is set to the resonance frequency of the primary resonance circuit 202, the
- Secondary resonance circuit 203 is excited by the magnetic field 106 to such an extent that the secondary current I2 and the secondary voltage U2 result. These are fed to the rectifier 204, which can provide a load 205, for example a battery 205, an intermediate circuit 205, a traction circuit 205 or an HV-DC 205 on the side of the CPM 104, a DC voltage.
- a load 205 for example a battery 205, an intermediate circuit 205, a traction circuit 205 or an HV-DC 205 on the side of the CPM 104, a DC voltage.
- the inductive charging system 100 is supplied via a DC voltage source 107 or HV-DC (High Voltage-Direct Current) or via an AC voltage 107.
- HV-DC High Voltage-Direct Current
- FIG. 3 shows the inductive charging system 100 as a control loop according to one
- This control loop allows the charging power of the inductive charging system 100 to be controlled, both during inductive charging and during start-up, switching on or in the start-up phase.
- WPT wireless power transmission system
- FIG. 4 shows a simplified illustration of the controlled system 210 according to a
- Controlling an ICS system 100 can help ensure functional safety in an ICS system. Due to the strong magnetic fields 106 that are used for power transmission, there may be regulations to protect the environment from excessive magnetic radiation. For example, these regulations may provide that a field 106 generated by a GPM 105 without a CPM 104 is present, or that if a CPM 104 is inconvenient with the GPM is coupled, field 106 is switched off after 2s at the latest. So it is
- a WLAN 101 which is used for communication between GPM 105 and CPM 104, can have a cycle time of up to 300 ms. In order to enable a quick reaction within the predetermined time, it may be desirable to get by essentially without the feedback via the feedback path 101 and therefore to use a system that essentially uses parameters that are only available on the GPM 105 and therefore essentially none Need feedback from the CPM 104. According to the control circuit 300, provision may be made to measure the P1 power on the GPM 105 and to regulate it. When the GPM 105 is started up or switched on, an operating point is sought at which a power of 500W is established at P1.
- the CPM 104 then waits for this power P1, which is measured on the CPM 104 and reported back to the GPM 105 via the feedback channel 101. Only when this reported output exceeds a predefinable threshold value, the GPM 105 is started up further in order to further maintain the functional safety during inductive charging.
- Threshold value can be determined that a working point has been found with which an in
- a communication channel 101 can be used to increase the power during the charging process in a controlled manner or to increase it to the desired power Receive feedback on the performance received from the CPM 104.
- the system 100 provides for the presence or absence of a power consumer 104 or the CPM 104 to be established or detected solely by means of the GPM 104 and solely with the GPM 105 Maintaining power without communication during the charging process, so that the power P1 in the primary resonance circuit 202 is constant. If the performance in
- the primary resonance circuit 202 is also constant that the output power Pout at the output of the rectifier 204 and / or at the output 220 of the
- the output variables are the phase phase, the
- Input voltage Ue, n or U of the filter 200 the input current 11 input circuit 202, the output current I2 of the secondary circuit 203, the output power Pout of the rectifier 204 and / or the output 220 of the energy transmission system 100, the current I La through the input coil La of the filter 200 and the current Ibatt through the load 205 in the intermediate circuit.
- Actuator 201 stores the control voltage information for the control unit.
- the output Sch is provided in FIG. 3, which specifies the positive edge of the controlled bipolar voltage or PWM at the inverter 201 and controls the X phase of the PWM, ie the switch pairs A, C of the inverter 201 for the transition from low to High indicates.
- the switching behavior, in particular the switching point Sch is predetermined by the switching timing signal T SC hait and the timing signal of the current zero-crossing T stromNuii passage of a zero-cross measurement of the current Ia or l La is evaluated through the coil La to the switching behavior evaluate and determine whether it is inductive or capacitive.
- the control device 302 is set up as a phase controller and uses one
- An active power measurement of the power P1 can be carried out on the GPM 105 and the field structure of the field 106 can be detected with the aid of the measurement of the active power without a CPM 104 being required for this.
- Calibration of reactive power S1 is a useful measure for measuring active power.
- the start of inductive charging is carried out with a constant duty cycle and a variable frequency by the inverter 201 or PWM (pulse width modulation) generator 201, the variable frequency being a
- the start frequency at which the PWM generator 201 starts is set at the maximum possible frequency in order to minimize the attenuation between the input variable, i.e. the duty cycle and the output from the primary component 202 of the GPM 105.
- the normal working frequency for the magnetic field is 85 kHz, and the resonance with the least attenuation is expected there.
- the start is made at a frequency which is distant from the working frequency.
- This regulation in order to produce the greatest possible damping between the duty cycle and the output variable, means at the same time that the control device 302 or the phase controller 302 is set up to set the smallest possible ratio of active power to apparent power P1 / S1 in the primary circuit 202.
- variable frequency approaches the resonance frequency of the when the frequency is reduced
- Secondary component 203 in particular the primary resonance circuit 202 and the
- Secondary resonance circuit 203 a loosely coupled transformer 211, between which the time-varying magnetic field 106 is formed. If resonance forms in the primary component 202 and the secondary component 203, an energy can be transmitted via the field 106 between the primary component 202 and the secondary component 203.
- an operating frequency, operating frequency or an optimal operating frequency is set which is close to one of the two resulting resonance frequencies of the coupled resonant circuit including the load and which enables the energy transfer between the primary resonance circuit 202 and the secondary resonance circuit.
- two individual resonant circuits 202, 203 which influence each other through the coupling.
- the primary resonant circuit with its resonance frequency f GPM and the secondary resonant circuit with its own resonance frequency f CpM are consequently present, which are coupled to one another.
- two resonant circuits are available, which are mutually linked by the coupling
- an overall transfer function is formed over the entire route 210 or the entire control loop 210.
- the overall transfer function of the energy transfer system 100 over the section 210 can be described as current amplification and / or voltage amplification and by a phase response.
- the working frequency, operating frequency or resonance frequency between 81.35 kHz and 90 kHz is set. Since this is initially unknown, it must be found within this frequency range.
- a start frequency is used to find them.
- the start frequency can be in the range [90 kHz; 81.35 kHz] can be selected until it reaches a final frequency which falls within the range [81.5 kHz; 90 kHz] can be selected.
- the frequency in the starting phase to find the operating point can be lowered, for example, from 90 kHz to 81.35 kHz. If the operating point has been found before a range limit is reached, the frequency in the operating point may be kept constant.
- a pre-control characteristic ensures that the time interval of the start-up process does not have a predeterminable value of, for example, 2.0 s
- the first feedforward characteristic curve varies the phase shift between PWMx 1401 and PWMy 1402 at a constant switching frequency, and the second feedforward characteristic curve ensures that
- the power control starts with the help of the feedback loop 101 or with the help of the return channel 101, including the CPM 104.
- Resonance frequency or in other words, the resonance frequency depends on the distance between GPM 105 and CPM 104.
- FIG. 5 shows a diagram of a frequency-dependent power P1 during a starting process according to an exemplary embodiment of the present invention.
- a frequency range 501 is drawn in the diagram 500, in which the variable frequency of the inverter 201 or the PWM generator 201 starting from an upper frequency 502, for example 90 kHz, to a lower frequency 503 can be lowered, for example up to 36 kHz.
- the frequency f in kHz is plotted on the abscissa 504 and the effective power P1 in W is plotted on the ordinate 505, which is measured on the side of the GPM 105. While the frequency f is reduced, the duty cycle Q of the PWM remains constant. Becomes a
- Working point AP found, at which resonance is established between primary circuit 202 and secondary circuit 203. i.e. If the coupled resonance frequency of the loosely coupled transformer 21 1 is found, the duty cycle Q can be increased and thus a higher power can be exchanged between GPM 105 and CPM 104.
- Secondary circuit 203 is at f GPM and the resonance frequency of secondary circuit 203 alone, without coupling to primary circuit 202, is at f CpM .
- the threshold value of the minimum active power required in the operating point AP found is identified by reference symbol 507.
- the operating point AP is only set if the CPM 104 is also arranged in the vicinity of the GPM 105.
- the GPM 105 can also be referred to as a base station 105.
- the base station 105 is used for the energy transmission system 100 or the ICS (inductive charging system) 100.
- the base station 105 has the generator device 201, which is set up to generate a time-dependent power P1 with a predeterminable duty cycle Q or duty cycle Q and a predeterminable frequency f.
- the base station 105 has a primary circuit 202 with a primary coil L1, Lprim and a primary measuring device 301 p for measuring an active power P1 and / or
- the measuring device 301 measures the input current 11 and the input voltage Uein of the filter 200.
- the base station 105 has a control device 302 and / or a control device 302 on the primary side.
- the primary circuit 202 is connected to the generator device 201 and the measuring device.
- the measuring device 301 has a submodule 301 p that is used for the
- This submodule may be referred to as the primary measuring device 301 p and is also associated with the
- the control device 302 and / or the The control device 302 is connected to the primary measuring device 301 p and the generator device 201, the control device 302 and / or the control device 302 being set up to keep the predefinable pulse duty factor Q constant, while varying the predefinable frequency f 504 starting from a starting frequency 502.
- the control device 302 and / or the control device 302 is also set up to use the primary measuring device 301 p to measure the active power P1 and / or the apparent power S1 while varying the predefinable frequency.
- the control device 302 and / or the regulating device 302 is also set up such that when a predefinable active power limit value P1x 504 and / or apparent power limit value S1x 507 is exceeded, the predeterminable frequency 506 is kept constant and the predefined pulse duty factor is varied and a predefinable combination of values for the predeterminable frequency f and the predeterminable
- control device 302 and / or the control device 302 may have stored a predeterminable number of value pairs from frequency values and duty cycle values, which are not assumed when the variable frequency f and the constant duty cycle Q are run through.
- Duty cycle can be selected, for example, from the group of exclusion criteria, the group from the capacitive switching, the
- the design limit of an electrical component can have the current carrying capacity and / or the dielectric strength of the electrical component.
- the switching behavior that is to say whether capacitive switching and / or inductive switching of the converter 201 is present, can be checked with the time signal Sch of the control device, measuring device 301 and / or the converter 201 and the time of the zero current measurement from the signal 1 in FIG. 2.
- the control device 302 and / or the regulating device 302 can use a list of permissible operating points and / or a multidimensional limitation in a frequency-duty cycle diagram to exclude the predefinable combination of values for the predeterminable frequency f and the predefinable duty cycle Q.
- the control device 302 and / or the control device 302 of the base station 105 has a feedback connection 303 in order to receive a feedback signal 303 from a remote device 104, in particular a CPM 105 of the energy transmission system 100, which indicates the size of a received power Pist, which is greater than the
- Energy transmission system 100 is transmitted at the predeterminable frequency f and the predefinable duty cycle Q.
- This feedback connection 101, 303 may support at least one transmission protocol from the group of transmission protocols WLAN, Bluetooth and NFC (near field communication).
- the control device 302 and / or the control device 302 may have a connection via which the control device 302 and / or the control device 302 can send a signal with which the generation of the time-dependent power in the generator device 201 can be stopped if the size of the received power Pist falls below a predeterminable value 507 within a predefinable period of time.
- the predeterminable time period can be 2 s.
- the control device 302 and / or the control device 302 can have a timer. When stopping, all drivers of the primary circuit 202 are deactivated, for example converter 201 and filter 200.
- the “phase” output of the control and / or regulating device 302 in FIG. 3 is the output for controlling the phases in order to influence the phase shift of the signals PWM-X and PWM-Y at the H-bridge of the converter 201.
- the operating point AP is indicated by a parameter tuple 506, 507, which has a coupling factor k, the inductance of the primary coil Li, Lp rim , a supply voltage U Batt , a first capacitance C a or an input capacitance C a of a filter 200, a second capacitance C b or an output capacitance C b of the filter 200, the predeterminable
- the specifiable frequency f 504 is descending from the start frequency 502 in the range [90 kHz; 85 kHz] up to a final frequency 503, the final frequency from the range [81 kHz; .36 kHz] is selected.
- the primary measuring device 301 p can be set up in such a way that it calibrates measured values that were determined during the measurement of the active power P1 and / or the apparent power S1 using a previously determined calibration factor. For example,
- Calibrating an offset value, a phase shift or a holding time can be determined in future measurements of the active power P1 and / or the
- Apparent power S1 is added or subtracted and or as an additional holding time of a sample-and-hold element.
- Phase shift can be adjusted, especially in one of the measurements of U1 or 11, in order to determine a calibrated power.
- the control device 302 and / or the control device 302 can be designed as an FPGA, ASIC, processor or microcontroller.
- the energy transmission system 100 for example an ICS system 100, has a base station 105 or GPM 105, a remote device 104 or CPM 104, the base station 105 and the remote device 104 being able to be loosely coupled to one another via an inductive coupling and the feedback connection 303.
- the base station 105 has the primary circuit 202 and the remote device 104 has the secondary circuit 203.
- the primary circuit 202 has the coil L1 and the secondary circuit has the coil L2. If the coils L1 and L2 are brought closer to one another, magnetic fields 106, which are generated by the coils, can penetrate the other coils L1, L2.
- the part of the magnetic field that passes through the other coil L1, L2 forms the inductive one Coupling with the coupling factor k or the coupling factor k.
- This coupling forms a loosely coupled transformer 211.
- the part of the magnetic field 106 that lies outside the other coil L1, L2 forms a stray capacitance.
- the coupling factor in the loosely coupled transformer is variable and, for example, on the relative position of the GPM 105 and CPM 104 dependent on each other.
- FIG. 6 shows a flowchart for an inductive charging process according to an exemplary embodiment of the present invention.
- a charging process is to be started.
- a triggering event can be, for example, that the control device 302 or the measuring device 301 detects that the GPM 105 and CPM 104 have moved to a predeterminable distance from one another.
- the loading process can also be started by a CPM 104.
- a calibration of the ICS system 100 and in particular the components of the GPM 105 is carried out first.
- variable and system-specific parameters are determined in order to calibrate the measuring device 301.
- the inductive charging including the startup of the ICS system 100, is carried out in the function block S603, the startup, the start-up or start-up process essentially comprising the finding of the working point AP.
- the charging by means of the ICS system 100 or the switching off of the ICS system takes place in the state S603 and the charging process returns to the idle state S604.
- Switching off takes place, for example, if charging cannot be started within a predefinable time interval or time window. This time interval can be 2s.
- the calibration phase S602 is run through each time a charging process is started.
- FIG. 7 shows a flowchart for the loading phase S603 including the startup according to an exemplary embodiment of the present invention.
- the charging phase S603 comprises a method for controlling and / or regulating one
- Base station 105 or an energy transmission system 100.
- For the startup phase starting from an idle state S701, one is first in state S702
- time-dependent power with a predeterminable duty cycle Q and a predeterminable frequency f is generated.
- the predeterminable frequency f is then started to vary starting from a start frequency 502, and at the same time the predefinable duty cycle Q is kept constant. While the frequency f is varied with a constant pulse duty factor Q, the active power P1 and / or the apparent power S1 is measured in a primary circuit 202 of the base station 105 by means of the measuring device 301.
- the pilot direction can reverse and start at the low frequency, with a different default duty cycle, and then the frequency can be increased so that a stable operating point AP can be found at a frequency fAP 506 at fAP ⁇ f (linmax).
- the filter capacitances Ca, Cb are switched.
- the adjustment of Ca, Cb also adjusts the input impedance and thus the phase position from lin to Uin over the frequency band [80 - 90kHz].
- the capacitive areas with a first configuration that are to be excluded are different
- predeterminable frequency and / or the predefinable duty cycle Q is varied, that is to say during states S703 and S704, a predetermined combination of values for the predeterminable frequency f and the predefinable duty cycle Q is monitored or excluded.
- the charging process is started. However, if the operating point AP, which is identified by the specifiable active power limit value P1x 507 and / or apparent power limit value S1x 507, is not recognized within a predeterminable time of, for example, 2 s, the function block S705 is skipped and the charging process is not started or terminated.
- the method ends in the idle state S706.
- the control device 302 and / or regulating device 302 is designed as a phase controller. It receives a power setpoint Psoll and an actual power value Pist.
- the loose coupling of the primary circuit 202 and the secondary circuit 203 when approaching forms a resonance transformer 21 1 or a resonance converter 211.
- Resonance converter 21 1 is the search or setting of an operating point AP at which the efficiency h is as large as possible, that is to say at which the condition h—> 1 and at which inductive switching takes place.
- inductive switching means that the PWM generator 201 sees the filter 200 as an inductive load, i.e. the current should lag behind the voltage to such an extent that the commutation of the voltage in the generator 201 or inverter 201 takes place when the switches are opened.
- the filter 200 essentially serves to filter out harmonics that arise during the generation of the square-wave signal of the PWM of the generator 201 in order to
- the filter 200 can be adjustable, for example, to enable the setting of the inductive switching behavior. At the same time, ZVS switching (zero voltage switching) of the switches of generator 201 can be made possible in order to reduce losses.
- the filter 200 can be adapted to the respective working point.
- the working point AP is defined as the point at which the required target power Psoll can be transmitted in a stable and constant manner. After the working point AP is reached, the controller 302 or the control device 302 ensures that at least three
- a first boundary condition is the inductive one Switching behavior of the generator 201 and the current limitation.
- the current limitation in particular the switching current limitation, limits the filter current l in through La. Inductive switching is determined by the time measurement of the zero crossing by the current L and is set by changing the switching time of the input voltage Ue in or U in or by shifting the control frequency.
- Another boundary condition to be maintained by the controller 302 is to ensure that after the start-up phase S703 a constant charging with a constant charging power Psoll takes place.
- the controller is intended to ensure, as a further boundary condition, that maximizing efficiency h is maximized during the charging process in state S705, in order to ensure optimum operation. Since all three boundary conditions cannot always be fulfilled equally well, the controller 302 can prioritize the
- the safety-relevant boundary condition has a higher priority than the boundary condition that affects the charging power Psoll.
- this second boundary condition has a higher priority than the boundary condition that concerns optimal operation.
- the controller 302 can influence the operating parameters of the generator 201 as control parameters.
- the operating parameters of the generator 201 have the frequency / and / or period of the PWMx / y signals T, and the phase shift Q of the two signals PWMx and PWMy relative to one another.
- FIG. 14 shows a time diagram or control scheme for the control of the converter 201 for generating a PWM at the input 206 of the filter 201 according to one
- the first timing diagram 1401 shows the first control signal PWMx 1401 for the first switch group A, C and the second control signal PWMy 1402 for the second switch group B, D as
- Switching pattern results as a result a voltage curve L, Uein 1403 which fluctuates between a positive and negative voltage value.
- a signal change from 0 to 1 is used as a positive edge and a signal change from 1 to 0 as a negative edge Roger that.
- the positive edges of the first control signal PWMx 1401 and the second control signal PWMy 1402 are shifted by a time shift t. This time shift corresponds to a phase shift of the PWM signals.
- Time difference shows up in the resulting voltage curve as one
- the period of the resulting voltage curve is the time interval between two identical signal states and is identified by T.
- the signal PWMx 1401 and PWMy 1402 are square-wave signals with those of
- Generator 201 controls switch group A, C or B, D of a full-bridge circuit or H-bridge over period T.
- the frequency / gives the number of
- the configuration of system 100 is determined by the internal parameter of the system.
- the filter 200 thus has an array of capacitors connected in parallel and / or in series, which can be switched on and off as required. It is also possible to use an array of parallel and / or disconnectable coils accordingly.
- UBatt, Ca, Cb are known from the specifications in the manufacture. That is, an operating point AP by the following
- Parameter combination or the parameter tuple is defined:
- variable frequency f variable duty cycle Q or variable duty cycle Q and constant coupling factor k per curve, as well as constant inductance of the primary coil LI or Lprim and constant output voltage UBatt
- controller 302 should therefore be dimensioned in such a way that a compromise between controller dynamics, resolution and robustness is found.
- the one for the method for the working point search which is used for the controller 302 is based on a method in which the dynamics of the working point search is restricted, so that the job search is very difficult small steps can be taken, ie with very small frequency changes. Through these small steps it is avoided that at the working points AP, in which a small working frequency variation in a time interval DeltaT becomes a relatively large one
- the working frequency variation is defined as the ratio of the change in the working frequency to the time interval Delta (working frequency) / DeltaT and the power change is defined as the ratio of the power change to the time interval deltaPI / deltaT.
- the abscissa 801 indicates the frequency / in kHz from 82 kHz to 89 kHz and the ordinate 802 indicates the duty cycle Q or the phase shift in percent% from 10% to 100%, the duty cycle Q or the phase shift according to FIG. 14 to the period is related, so
- the color values indicate the measured active power P1 in the primary circuit 202.
- the power Pout varies between 0 kW and 3.3 kW. There are essentially 3 areas. In the power range 803, the power is in the order of 3.3 kW. In the 804 power range, the power is of the order of 0 kW. Inductive switching is possible in areas 803 and 804, ie the filter 200 behaves like an inductive load or the boundary condition of the inductive behavior is fulfilled. A capacitive behavior can be seen in areas 805. Therefore, the controller 302 set up so that it avoids the occurrence of corresponding value combinations of the frequency / and the duty cycle Q.
- FIG. 9 shows a diagram of a three-dimensional representation of the efficiency h over the frequency / and the duty cycle Q according to an exemplary
- Embodiment of the present invention The efficiency is plotted qualitatively in FIG. 9. The efficiency is low in the area 904 and the efficiency is high in the area 905.
- the controller 302 is set up in such a way that the search for the operating point AP starts at a high frequency as the starting point.
- a small change in frequency / or a small change in duty Q or phase shift Q due to the lower sensitivity in this area, causes less change in power than in small frequencies.
- controller 302 should be checked in such a way that a special configuration of the controller 302 also fulfills the condition that a reduction in the frequency leads to a local improvement in the efficiency. In other words, that dPout d Pout
- Pout indicates the output power of the CPM 104 at the output 220.
- the GPM 105 receives the information about the output power Pout
- Communication channel 101 for example WLAN, from the CPM 104 every 100 ms.
- the controller 302 can also be set up to recognize that the
- the controller 302 can carry out switching measures on the filter 200 which physically configure the filter 200 Change so that inductive operation is possible again. For example, an additional
- Capacitor to the input capacitor Ca and / or to the output capacitor Cb are connected in parallel or an array of filters to form a switchable filter.
- the controller 302 essentially has to constantly monitor the boundaries between the inductive and capacitive range and that a suitable start-up strategy or a control behavior for the controller 302 for the startup must be found to get into the desired working points.
- the power controller in 302 is designed as a PI controller.
- FIG. 10 shows a linearized equivalent circuit diagram of the ICS system 100 from FIG. 2 according to an exemplary embodiment of the present invention.
- This linearized system extends from the inverter 201 or generator 201 to the battery or load 205.
- This linearized system can be adopted by generator 201 in the case of a sinusoidal excitation.
- the rectifier 204 was replaced by an RC element 205 ', which maps the system of rectifier and battery for a given parameter tuple k, Ubatt, Pout in the linearized model.
- the frequency dependence was not taken into account for the calculation due to the small influence.
- the frequency controller (not shown in FIG. 3) is used in parallel to find the optimum working point, in which the losses are minimal, for the configuration ⁇ P, Ubatt, k, L1, L2 ⁇ , geometrically and depending on the load.
- These conditions are tough conditions, i.e. conditions that have to be met for a specific system.
- Working points are defined as working points at which the power, in particular the target power, is kept constant.
- local efficiency maxima are sought, of which there can also be several in the accessible area.
- AP In order to obtain a stationary working point AP, its approachability must also be ensured during the startup phase.
- the working points AP which are within the same
- Preferred directions by deciding whether the frequency should be incremented or decremented.
- the decision about the preferred direction is made depending on the electrical conditions. In one example, an optimum is searched for using a maximum power point tracker and an indication of a high current la is used to reduce the frequency and a capacitive switching behavior is used as an indicator to increment the frequency.
- the controller in the resonance converter of the GPM 105 can additionally ensure with L2 and C2 that the energy transfer is stable
- the main pout remains constant, although parameters such as the coupling factor k may change, for example if a car is charging during the
- the primary power P1 is regulated by the controller 302.
- the controller 302 receives the value of the primary power P1, as shown in FIG. 3, from the measuring device 301 via the connection 303, 101, which is connected to the output Pout of the measuring device 301.
- Pout is the power at output 220 of CPM 104 across resistor 205.
- the phase shift detected by the measuring device 301 changes from current to voltage in the primary field, i.e. in the field generated by the primary coil L1. This phase shift affects the phase shift of the measurement, not the phase shift of the real states. This means that although the system 100 and in particular the primary circuit 202 operates with a real or actual phase shift and thus actually a power P1 is generated, the controller 302 and / or the measuring device 301 assumes incorrect values for the
- Measuring device 301 calculates the power P1 from the evaluation of the phase relationship between current 11 and voltage U1.
- a sample-hold device 1 103 can be provided in the measuring device 301 during power acquisition, which has a correction device which is set up to use a time delay or a group delay in order to compensate for the angle errors and / or fix it.
- the "continuous measurement signal", ie the sinusoidal current 11 or the sinusoidal voltage U1 is digitally recorded and also delayed by a holding element before this signal is multiplied by U1 or 11, so that a positive phase shift can be added to one of the two time signals ,
- the regulation in the controller 302 is based on a power measurement S1 of the resonant circuit 202, which works with a frequency of the converter 201 in the range of 80-90 kHz and with a correspondingly short period.
- the apparent power S1 to be measured is very high and can be of the order of 1 100kVA. While with a power measurement a power of 50 W to 500W at 50Hz
- Phase errors or a dead time in the order of 0.1 mb which is only slightly affected by the measurement errors of the hardware, have a dead time of 0.1 mb with a correspondingly short period
- Vibration in the range from 80 kHz to 90 kHz is noticeably more noticeable and the falsification of the measurement result compared to the actual values of the power cannot be tolerated, in particular not when operating points of the ICS system are to be set and the controller 302 has a high sensitivity.
- the output power Pout at the output 220 can thus also be set and controlled very precisely
- the power calculation P1, S1 in the primary circuit from the primary current 11 and the primary voltage U1 is considered below. For the sake of simplicity, however, the derivation is carried out without the indices applicable to the primary circuit. Despite the general derivation, it is clear that this also applies to the primary circuit.
- the power is measured in the primary circuit 202 on the GPM side by means of a measuring device 301.
- the active power measurement P_real or P reai is determined using the effective current l rms , Urms and the phase position f from the current to the voltage fui
- a time-variant magnetic field 106 is built up.
- the control 201 or the PWM generator 201 generates a PWM signal with a pulse duty factor Q.
- the PWM signal is a voltage curve, the pulse duty factor Q being converted into the amount of a voltage can, which in turn results in a power to be transmitted, the size of which is related to the duty cycle. In this way, the transmitted power of an ICS system can be controlled via the duty cycle Q.
- the input voltage Uein or Uin is the voltage that the generator 201 generates and that is made available to the filter 200.
- the filter 200 generates the
- Transformer 21 1 transformed into the secondary current I2 and the secondary voltage U2 for the secondary circuit 203.
- Various transfer functions can be defined to describe the conversion of the different voltages and currents into one another.
- the transfer function G u (s) is the transfer function from input voltage Uin or Uein to primary current 11.
- the transfer function is the transfer function from input voltage Uin or Uein to primary voltage U1.
- the transfer function G ui (s) is a transfer function from primary current 11 to primary voltage U1.
- the transfer function G I1 I2 ⁇ s) is the transfer function from primary current 11 to secondary current I2.
- Output resistance is low, for example in the event of an output short circuit, ie if ffo—> 0 applies. Should such a situation exist in which no power can be transferred to the secondary side, it also applies that the amounts
- RMS Root Mean Square
- the control device 302 must use the measuring device 301
- Monitor control voltage U1 and control current 11. This state, in which no power can be transmitted to the secondary side, must not be operated for a long time, especially in the event of an output short circuit, in particular in the case that Ro 0. Overcurrent monitoring is provided in system 100 to detect such a state. If a short circuit occurs with low control, this protective function is bypassed and the hardware of the CPM 104 may be damaged.
- the sinusoidal signals at the output of the filter 200 are measured by means of the measuring device 301 when they are generated by the square-wave signal of the generator 201
- the measuring device 301 represents the sinusoidal measurement signals in the time domain
- the time domain essentially serves only as a description of the dependency of the measurement with the phase shifts between current 11 and voltage U1. In the time domain, a phase shift becomes noticeable as a dead time.
- Influencing factors on the measuring device 301 are observed a phase shift (
- the phase shift between current and voltage, which is caused by the filter 200, is fui.
- the phase shift between / l (t) l / rms V2sin (cot) and
- I l [t) I rms ' j2sm (a) t + (l) UI ) assuming that there is no measurement error
- the measuring device can determine the phase difference by means of the O-crossing detection or the zero-crossing detection of the current 11 and of the voltage U1 using an analog measuring method, in that the measuring device 301 determines the times of the zero crossings of 11 and U1 and uses this to determine the phase shift as the time difference of the zero crossings.
- the measuring device 301 can determine the phase difference between U1 and 11 from the ratio of a continuous active power measurement and
- Measurement error occurs in the form of ⁇ uMbM 'F ! ⁇ Mb ⁇ > F errors ⁇ au ⁇ are independent of the choice of the measuring system 301 or the measuring device 301 when detecting the
- this value is composed of the actual phase shift f ni between current and voltage, the phase error / mess between the actual phase of the current and the measured phase of the current, the phase error U mess between the actual phase of the voltage and the measured phase the voltage and an error Def / he detection of the phase position. This gives the value for the measured phase position
- the influence of digital filtering can essentially be removed deterministically, for example by using a correction filter.
- the influencing factors of analog measurement technology can be estimated and thus removed, but they are subject to stochastic scattering and therefore cannot be removed as well as the influencing factors of digital filtering.
- the influencing factors of the system configuration e.g. Changes in impedance to changes in Cb caused by unintentional changes, but also changes in L1, are difficult to remove because impedances change in different ones
- FIG. 1 1 shows a detailed view of the measuring device 301 with the primary measuring device 301 p or primary measuring device 301 p according to an exemplary
- the primary measuring device 301 p for measuring a current active power P, P1 in a primary circuit 202 of an energy transmission system 100 has an evaluation device 1 101 and a calibration device 1 102.
- the evaluation device 1 101 has a measurement connection for detecting a current I 1 mess , a voltage U1 mess and a measured phase shift (
- the current current M mess W is via the input i1 of
- Measuring device 301 measured.
- Calibration device 1 102 are connected to one another and evaluation device 1 101 is also set up to carry out a power measurement by evaluating the detected current Imess and the detected voltage Umess.
- the calibration device 1 102 is also set up to correct the detected current I mess and / or the detected voltage U mess via the cos () value of the detected phase shift f 55 between the detected current I mess and the detected voltage U mess .
- the evaluation device 1 101 is set up to calculate a power value with the corrected value l k0 rr of the detected current and / or with the corrected value U orr of the detected voltage, and the calibration device 1 102 is set up to provide the calculated power value as the current active power P k0ir .
- P corr results from f ⁇ .
- phase shift f q is determined according to formula (K3) from cos ⁇ f). This phase shift f
- phase shifts of the system namely the phase shift between real and measured voltage fu , G TM ⁇ , the phase shift between real and measured current fi ,, t ⁇ and the actually present
- Phase shifts are delays caused by the hardware of the ICS system 100, in particular delays caused by the digital and analog modules (analog and digital group delays) of the ICS system 100.
- the measured power P mess depends on these group delays and is falsified by the group delays. This falsification is to be corrected by the calibration device 1 102. With the group delays, f and thus P are also corrected.
- the primary measuring device 301 p calculates the corrected value I corr of the detected current from the detected value of the current I mess , taking into account a delay value TCAL, which has been derived from the detected phase shift f, t ⁇ .
- f q33 is the measured phase shift between the measured current Imess and the measured voltage U mess in the primary circuit 202.
- Phase shift can be carried out at any frequency within the permissible frequency range between 81.35kHz to 90kHz. In one example
- Determining the value of the calibration by means of controller 302 sets an operating point of the ICS system 100 at which the active power is very much smaller than the apparent power, in which case P «S, in particular P1« S1.
- phase shifts or phase shifts that occur within a measured cos are to be compensated by adding a group delay to a measured value of I or to a measured value of U in order to compensate for the incorrect phase shift.
- a sample hold device 1 103 is provided in a digital part of the measuring device 301.
- This calibration can be carried out for a setpoint value provided by a power control 302.
- the controller 302 by the target value setting means 304, a target value P are given as n, by the calibration is already taken into account.
- Measuring device can be cleaned by means of the calibration so that the target value setting device 304 can work with real values and does not have to take phase errors into account.
- the sample hold device 1 103 of the primary measuring device 301 p can be used for
- the sample hold device 1 103 can run in the hardware of the
- Phase shifts are converted into a group term and as
- the total group delay Tcal or total phase shift foqI of the measured signal to the real signal includes a systematic phase shift through the circuit design, e.g.
- the primary measuring device 301 p can be integrated in a ground pad module 105.
- the GPM 105 works as an autonomous system and can perform the calibration without a CPM 103.
- Measuring devices 301 which are used for the calibration, are present on the GPM 105.
- the calibration is based only on measurements on the primary side
- Calibration factor for a measurement of an active power in a primary circuit 202 of an energy transmission system 100 according to an exemplary embodiment of the present invention. This procedure is performed essentially every time before loading starts to determine the calibration factor. The calibration factor is found in the calibration phase S602
- a switch can also be provided with which the execution of the calibration phase S602 can be switched off and on.
- the method for determining a calibration factor for a measurement of active power in a primary circuit 202 of an energy transmission system 100 starts in an idle state S1201.
- state S1202 it provides for setting a predefinable operating point by setting a predefinable input voltage and a predefinable operating frequency.
- state S1203 the method further comprises generating a power ratio with a low active power and a high apparent power at this operating point.
- the calibration factor is determined as in state S1204
- Phase shift f 03 i and / or as a hold time Tcal This calibration factor can then be taken into account in the subsequent charging phase S603 of the ICS system in order to compensate for measurement errors.
- FIG. 13 shows a flowchart of a method for calibrating a measured value according to an exemplary embodiment of the present invention.
- This method can be used to use a calibration factor during a subsequent measurement phase, for example in the subsequent charging phase S603, in order to eliminate measurement errors. If the calibration factor is set, it can be taken into account during all subsequent measurements.
- a GPM 105 and / or an ICS system 100 can be calibrated in this way.
- the procedure for calibrating a measured value begins in the idle state S1301. In the subsequent state S1302, a current I mess , a voltage Umess and a measured phase shift (
- a power measurement is carried out by evaluating the detected current L ess and the detected voltage Umess.
- the detected current Imess and / or the detected voltage U mess is corrected via the cos () value of the detected
- the calculated power value is provided as the current active power P or r before the method ends in idle state S1306.
- the calibration of the power is determined with the aid of the acquisition of the calibration factor in the form of the phase position at an operating point using the following basic procedure.
- a predefined input voltage and an operating frequency are set by means of the control device 302.
- a pilot control without feedback loop 101 is used.
- the control curves PWM x / y 1401, 1402 are set via the parameters of
- Phase shift from x to y and common PWM frequency i.e. same frequency for PWMx / y with 50% PWM-X duty cycle and 50% PWM-Y duty cycle, as shown in FIG. 14 by signals 1401 1402.
- the frequency and phase are set, controlled or varied until a minimum power can be measured at the input 206 of the filter for the regulation. This results in the course of the
- the active power of the primary circuit 202 is then set by means of the control device 302 such that the active power is low or in the range of 0 W with a substantially greater apparent power than the reactive power, so that P «S applies. This big difference between apparent power and reactive power can under
- a short circuit of the load 205 can be brought about by means of the crowbar 401 present in the CPM 104, which has the switch S1. If the crowbar 401 is blocked, i.e. S1 is closed, the load at the output of the CPM 104 is essentially short-circuited and is close to zero. If no active power P2 can flow on the secondary side 203, then that is
- the setting of the property that the following applies in the primary circuit 202 of the GPM 105 can alternatively also be achieved essentially without having to make any settings on the CPM 104 by carrying out a specific system configuration in the GPM 105.
- the control device 302 sets a phase shift between the signals PWMx 1401 and PWMy 1402 of the PWM generator 201, which results in a duty cycle of the resulting PWM signal 1403, such that an input voltage Uein or Ui n arises, but no active power can build up yet.
- the input voltage is therefore only set by the phase shift and by the duty cycle Q of the resulting PWM signal.
- Frequency adjustment ensures a high apparent power to real power.
- the system is set at a frequency that is far above the resonance frequency. This shift results in a high apparent power to real power.
- the system in particular the GPM 105, requires a very high proportion of reactive power at very low powers and P -> 0 or P «S can be assumed. This is due to the system by controlling this converter in the ICS topology, as shown in FIG. 4. A low power is set at a high frequency.
- An operating point is determined by the input voltage Ue in or U in and the frequency. This operating point should be selected system-specific or configuration-specific. You may be able to use the CPM current (battery current) as a feedback source.
- This method provides for the manipulation of the resonant circuit, whereby the resonant circuit is manipulated in such a way that the coupling factor k becomes very small and that applies k -> 0. In order to carry out this manipulation, the position of the CPM and GPM would not have to be defined by the vehicle and would Charging can be influenced
- the CPM could be moved far away from the GPM by a moving system and a current could be set in the GPM.
- the coupling decreases with the distance in height (z-distance) from coil to coil. This could be used for systems that use the car
- the phase shift can be determined using a
- the phase shift fea ⁇ can be added additively for a zero crossing detection measurement.
- a group delay can be controlled dynamically with a holding time Tcal.
- a dynamic group runtime is determined by the hold time.
- phase shift measurement The calibration factor Tcal or fea ⁇ can be determined:
- Measuring device 301 scanned.
- measuring device 301 uses a sampling rate or sampling rate of 1 MHz to sample the transformer signals. This
- Sampling rate is sufficient for signals with 80kHz - 90kHz.
- the measuring device 301 detects the transformer signals U1 and 11 of the primary circuit 202 by means of an instantaneous value detection and uses this to calculate the active power P1.
- Active power is calculated during the instantaneous value acquisition
- the previously determined calibration factor Tcal is taken into account in order to eliminate measurement errors when calculating the power.
- Sample and hold or simple addition are used for calibration.
- the addition of Tcal is shown mathematically in (K12).
- the apparent power is time-independent or angle-independent.
- a short circuit is generated on the CPM.
- the CPM 104 communicates with the GPM 105 via channel 101.
- the CPM signals to the GPM that the CPM wants to be loaded.
- the GPM 105 could also start the charging process.
- This signaling can trigger the charging process by transferring power from the GPM to the CPM.
- the CPM can transmit a load command to the GPM.
- the CPM 104 holds the crowbar in the “crowbar closed” state, in which the switch S1 is closed in order to separate the battery 205 and / or the intermediate circuit 205 from the vehicle from the secondary resonant circuit 203 by means of a short circuit. This condition is also about the
- the GPM uses a precontrol device on the controller 302 to set an operating point at a defined input voltage Uin
- Working frequency fsw, cal and build up an apparent power S at this operating point means the control frequency at which the calibration is carried out, e.g. 90kHz.
- the CPM 104 is informed by means of a corresponding signaling from the GPM 105 via channel 101 that the calibration of the active power has ended, ie that the calibration factor has been determined and the corrective measures have been set in the measuring device 301. After receiving this ready message, the CPM 104 opens the Crowbar 401 changes to the "Crowbar open” state and signals back to the GPM that the Crowbar 401 is open.
- the determined delay times or calibration factors can then be used as a function of the control frequency fsw or working frequency fsw of the GPM
- the GPM 105 thus completes the calibration phase S602 and goes into the charging mode S603.
- the GPM 105 sets the active power P1 of the ICS system 100 on the basis of the measurement with the determined additional delays Tcal (i) and Tcal (u).
- the relevant transfer functions are determined for all operating states of the device.
- the condition P «S is approximated.
- the real part of the equivalent impedance Z 0 is also so small that this behavior can be equated to a short circuit of the crowbar and a procedure similar to that of the variant in which the CPM and in particular the crowbar is also used for the calibration
- the inductance values L1, L2 can be carried out.
- the inductance values L1, L2 can be carried out.
- phase shift and control frequency of the calibration is selected so that for all parking positions and battery voltages, these parameter combinations lead to a very low P1 / S1 ratio.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
Beschrieben wird eine Primärmessvorrichtung (301p) zum Messen einer aktuellen Wirkleistung (P, P1) in einem Primärkreis (202) eines Energieübertragungssystems (100), aufweisend eine Auswerteeinrichtung (1101), eine Kalibriereinrichtung (1102), wobei die Auswerteeinrichtung (1101) einen Messanschluss zum Erfassen eines Stroms (Imess), einer Spannung (Umess) und einer gemessenen Phasenverschiebung (ϕmess) zwischen Strom (Imess) und Spannung (Umess) in dem Primärkreis (202) aufweist, wobei die Auswerteeinrichtung (1101) und die Kalibriereinrichtung (1102) miteinander verbunden sind, wobei die Auswerteeinrichtung (1101) weiter zum Durchführen einer Leistungsmessung durch Auswerten des erfassten Stromes (I1mess) und der erfassten Spannung (Umess) eingerichtet ist, wobei die Kalibriereinrichtung (1102) zum Korrigieren des erfassten Stroms (Imess) und/oder der erfassten Spannung (Umess) über den cos()-Wert der erfassten Phasenverschiebung (ϕmess) zwischen erfasstem Strom (I1mess) und erfasster Spannung (Umess) und/oder über eine Haltezeit (Tcal) eingerichtet ist, wobei die Auswerteeinrichtung (1101) zum Berechnen eines Leistungswertes mit dem korrigierten Wert (Ikorr) des erfassten Stroms und/oder dem korrigierten Wert (Ukorr) der erfassten Spannung eingerichtet ist und wobei die Kalibriereinrichtung (1102) zum Bereitstellen des berechneten Leistungswerts als aktuelle Wirkleistung (Pkorr) eingerichtet ist.
Description
Primärmessvorrichtung zum Messen einer aktuellen Wirkleistung
Gebiet der Erfindung
Die Erfindung betrifft das technische Gebiet des induktiven Ladens. Insbesondere betrifft die vorliegende Erfindung eine Primärmessvorrichtung und ein Verfahren zum Kalibrieren eines Messwerts.
Hintergrund der Erfindung
Zum elektrischen Laden eines reinen Elektrofahrzeugs (EV, Electric Vehicle) oder eines Hybridfahrzeugs (PHEV, Plug-in Hybrid-Electric Vehicle), welches mit einer Kombination aus Treibstoff und elektrischer Energie betrieben wird, kann ein System für die induktive Energieübertragung genutzt werden, wenn das Laden kontaktlos erfolgen soll. In einem solchen System wird ein magnetisches Wechselfeld im Frequenzbereich von 25...150kHz erzeugt. Dabei muss beachtet werden, dass außerhalb dieses Frequenzbandes die Grenzwerte für die Emission elektromagnetischer Wellen durch international gültige Normen festgelegt sind. Denn obwohl prinzipiell ein Magnetfeld zur Energieübertragung genutzt wird, handelt es sich jedoch aufgrund der Tatsache, dass sich das Magnetfeld ändert inhärent um eine elektromagnetische Welle. Wegen der langsamen
Veränderungen der Feldstärken weist die beim induktiven Laden genutzte
elektromagnetische Welle allerdings eine Wellenlänge von mehreren Kilometern auf.
Um diese Grenzwerte für die Emission einzuhalten ist darauf zu achten, dass das zur Energieübertragung genutzte magnetische Wechselfeld mit einer Grundschwingung im Bereich 25...150kHz arbeitet und nur sehr geringe Oberwellen enthält. Daher kommen Filter zum Einsatz, die störende Oberwellen möglichst entfernen. Außerdem muss, um die international gültigen Normen und Richtlinien einzuhalten, dafür gesorgt werden, dass eine Energieübertragung nur dann erfolgt, wenn eine bestimmte Qualität der Kopplung zueinander erreicht ist, indem eine bestimmte Ausrichtung der Koppelelemente zueinander eingestellt wird, beispielsweise durch ein Positionierungssystem wie beispielsweise in der Druckschrift EP 3 103 674 A1 beschrieben ist.
Die Druckschrift EP 2 868 516 A1 beschreibt ein Verfahren zur Regelung der zwischen zwei Resonatoren eines Systems zur kontaktlosen Energieübertragung übertragenen Energie, sowie Resonanzanordnung.
Als Koppelelement für die Energieübertragung wird auf der stationären Seite ein GPM (Ground Pad Module) mit einer Primärspule und fahrzeugseitig ein CPM (Car Pad
Module) mit einer Sekundärspule genutzt. GPM und CPM bilden für die Koppelung und Energieübertragung einen Transformator. Die physikalische Ausrichtung der
Koppelelemente zueinander wird über ein Positioniersignal z.B. RKS (Remote Keyless Entry System) gemessen und eingestellt. Für die Energieübertragung und die
Übertragung des Positionierungssignals kommen unterschiedliche Übertragungsstrecken und unterschiedliche Übertragungstechniken zum Einsatz.
Es mag als eine Aufgabe der vorliegenden Erfindung angesehen werden, eine effektive Übertragung von Energie zu ermöglichen.
Zusammenfassung der Erfindung
Dementsprechend wird eine Primärmessvorrichtung und ein Verfahren zum Kalibrieren eines Messwerts angegeben.
Der Gegenstand der Erfindung wird von den Merkmalen der unabhängigen
Patentansprüche angegeben. Ausführungsbeispiele und weitere Aspekte der Erfindung werden von den abhängigen Ansprüchen und der folgenden Beschreibung angegeben.
Gemäß einem Aspekt der vorliegenden Erfindung wird eine Primärmessvorrichtung zum Messen einer aktuellen Wirkleistung in einem Primärkreis eines
Energieübertragungssystems beschrieben, aufweisend eine Auswerteeinrichtung und eine Kalibriereinrichtung, wobei die Auswerteeinrichtung einen Messanschluss zum Erfassen eines Stroms, einer Spannung und einer gemessenen Phasenverschiebung zwischen Strom und Spannung in dem Primärkreis aufweist. Die Auswerteeinrichtung und die Kalibriereinrichtung sind miteinander verbunden und die Auswerteeinrichtung ist weiter
zum Durchführen einer Leistungsmessung durch Auswerten des erfassten Stromes und der erfassten Spannung eingerichtet. Die Kalibriereinrichtung ist zum Korrigieren des erfassten Stroms und/oder der erfassten Spannung über den cos()-Wert der erfassten Phasenverschiebung zwischen erfasstem Strom und erfasster Spannung und/oder über eine Haltezeit eingerichtet. Außerdem ist die Auswerteeinrichtung zum Berechnen eines Leistungswertes mit dem korrigierten Wert des erfassten Stroms und/oder dem korrigierten Wert der erfassten Spannung eingerichtet. Die Kalibriereinrichtung ist auch zum Bereitstellen des berechneten Leistungswerts als aktuelle Wirkleistung eingerichtet.
Gemäß einem anderen Aspekt der vorliegenden Erfindung wird ein Verfahren zum Bestimmen eines Kalibrierungsfaktors für eine Messung einer Wirkleistung in einem Primärkreis eines Energieübertragungssystems angegeben. Dieses Verfahren weist das Einstellen eines vorgebbaren Arbeitspunktes durch Einstellen einer vorgebbaren
Eingangsspannung und einer vorgebbaren Arbeitsfrequenz, das Erzeugen in diesem Arbeitspunkt eines Leistungsverhältnisses mit einer geringen Wirkleistung und einer hohen Scheinleistung und das Bestimmen des Kalibrierungsfaktors als
Phasenverschiebung und/oder als Haltezeit zur bekannten Referenz auf.
Ferner wird gemäß einem Aspekt ein Verfahren zum Kalibrieren eines Messwerts angegeben. Das Verfahren weist das Erfassen eines Stroms, einer Spannung und einer gemessenen Phasenverschiebung zwischen Strom und Spannung in einem Primärkreis auf. Außerdem weist das Verfahren das Durchführen einer Leistungsmessung durch Auswerten des erfassten Stromes und der erfassten Spannung, das Korrigieren des erfassten Stroms und/oder der erfassten Spannung über den cos()-Wert der erfassten Phasenverschiebung zwischen erfasstem Strom und erfasster Spannung und/oder über eine Haltezeit auf. Ferner weist das Verfahren das Berechnen eines Leistungswertes mit dem korrigierten Wert des erfassten Stroms und/oder dem korrigierten Wert der erfassten Spannung und das Bereitstellen des berechneten Leistungswerts als aktuelle Wirkleistung auf.
Gemäß einem weiteren Aspekt der vorliegenden Erfindung wird ein computerlesbares Speichermedium angegeben, in dem ein Programm gespeichert ist, das, wenn es von einem Prozessor ausgeführt wird, eines der erfinderischen Verfahren ausführt.
Eine Steuereinrichtung oder ein Controller kann solch einen Prozessor nutzen.
Als ein computerlesbares Speichermedium mag eine Floppy Disc, eine Festplatte, ein USB (Universal Serial Bus) Speichergerät, ein RAM (Random Access Memory), ein ROM (Read Only Memory) oder ein EPROM (Erasable Programmable Read Only Memory) genutzt werden. Als Speichermedium kann auch ein ASIC (application-specific integrated Circuit) oder ein FPGA (field-programmable gate array) genutzt werden sowie eine SSD (Solid-State-Drive) Technologie oder ein Flash-basiertes Speichermedium. Ebenso kann als Speichermedium ein Web-Server oder eine Cloud genutzt werden. Als ein
computerlesbares Speichermedium mag auch ein Kommunikationsnetz angesehen werden, wie zum Beispiel das Internet, welches das Herunterladen eines Programmcodes zulassen mag. Es kann eine funkbasierte Netzwerktechnologie und/oder eine
kabelgebundene Netzwerktechnologie genutzt werden.
Ferner wird ein Programm-Element angegeben, das, wenn es von einem Prozessor ausgeführt wird, eines der erfinderischen Verfahren ausführt.
Gemäß noch einem Aspekt der vorliegenden Erfindung ergibt sich der korrigierte Wert des erfassten Stroms aus dem erfassten Wert des Stroms unter der Berücksichtigung eines Verzögerungswertes, der von der erfassten Phasenverschiebung abgeleitet worden ist.
Gemäß noch einem Aspekt der vorliegenden Erfindung wird die Kalibrierung für einen bereitgestellten Sollwert einer Leistungsregelung vorgenommen.
Gemäß noch einem Aspekt der vorliegenden Erfindung weist die Primärmessvorrichtung eine Sample-Hold-Einrichtung auf, wobei die Sample-Hold-Einrichtung zur
Berücksichtigung des Verzögerungswertes eingerichtet ist. Beispielsweise ist die Sample- Hold-Einrichtung eingerichtet, eine Laufzeit in der Hardware der Primärmessvorrichtung zu berücksichtigen.
Gemäß einem anderen Aspekt der vorliegenden Erfindung wir ein Ground Pad Modul mit einer Primärmessvorrichtung angegeben.
Kurze Beschreibung der Figuren
Im Folgenden werden weitere exemplarische Ausführungsbeispiele der vorliegenden Erfindung mit Verweis auf die Figuren beschrieben.
Fig. 1 zeigt ein induktives Ladesystem gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 2 zeigt ein Blockschaltbild eines induktiven Ladesystems gemäß einem
exemplarischen Ausführungsbeispiel der vorliegenden Erfindung dargestellt.
Fig. 3 zeigt das induktive Ladesystem als einen Regelkreis gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 4 zeigt eine vereinfachte Darstellung der Regelstrecke aus Fig. 3 gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Die Fig. 5 zeigt ein Diagramm einer frequenzabhängigen Leistung während eines
Startvorgangs gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 6 zeigt ein Flussdiagramm für einen induktiven Ladevorgang gemäß einem
exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 7 zeigt ein Flussdiagramm für die Ladephase einschließlich des Startups gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 8 zeigt ein Diagramm einer dreidimensionalen Darstellung einer übertragenen Leistung über einer Frequenz und dem Tastverhältnis gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 9 zeigt ein Diagramm einer dreidimensionalen Darstellung des Wirkungsgrades über der Frequenz und dem Tastverhältnis gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 10 zeigt ein linearisiertes Ersatzschaltbild des ICS Systems aus Fig. 2 gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 1 1 zeigt eine Detailansicht der Messvorrichtung mit der Primärmessvorrichtung gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 12 zeigt ein Flussdiagramm eines Verfahrens zum Bestimmen eines
Kalibrierungsfaktors für eine Messung einer Wirkleistung in einem Primärkreis eines Energieübertragungssystems gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 13 ein Flussdiagramm eines Verfahrens zum Kalibrieren eines Messwerts gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Fig. 14 zeigt ein Zeitdiagramm für die Ansteuerung eines Wandlers zur Erzeugung einer PWM am Eingang eines Filters gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Detaillierte Beschreibung von Ausführungsbeispielen
Die Darstellungen in den Figuren sind schematisch und nicht maßstäblich. In der folgenden Beschreibung der Fig. 1 bis Fig. 14 werden die gleichen Bezugsziffern für gleiche oder sich entsprechende Elemente verwendet.
In diesem Text mögen die Begriffe„Kondensator“ und„Kapazität“ sowie„Spule“ oder „Drossel“ und„Induktivität“ gleichbedeutend verwendet werden und sollen, sofern nichts weiter angegeben ist, nicht einschränkend interpretiert werden.
Fig. 1 zeigt ein induktives Ladesystem 100 gemäß einem exemplarischen
Ausführungsbeispiel der vorliegenden Erfindung. Hierbei ist eine Seitenansicht für ein System zum kontaktlosen Laden eines Elektrofahrzeugs dargestellt. Unterhalb eines Fahrzeugchassis 102 befindet sich ein Car Pad Modul (CPM) 104, welches dazu dient, das Fahrzeug 102 mit Strom zu versorgen. Für die Übertragung der Energie wird ein Magnetfeld genutzt, welches induktiv die Energie von einem an einem Boden 103 fix montierten Ground Pad Modul (GPM) 105 bereitgestellt wird. Die für das Laden notwendige Energie wird dem Hauptanschluss 107 entnommen, der sowohl
Wechselstrom (AC) als auch Gleichstrom (DC) sein kann. Zur Kommunikation zwischen CPM 104 und GPM 105 wird eine separate Verbindung 101 genutzt, welche
beispielsweise ein Funkprotokoll wie WLAN (Wireless LAN) oder NFC nutzen kann. Diese Verbindung kann als Feedback-Kanal 101 genutzt werden oder als Kommunikationskanal 101 , über den CPM 104 und GPM 105 Informationen austauschen kann. Sowohl das Magnetfeld zur Energieübertragung 106 als auch das Funksignal 101 sind
elektromagnetische Wellen, die jedoch unterschiedliche Frequenzen aufweisen.
In Fig. 2 ist ein Blockschaltbild eines induktiven Ladesystems 100 gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung dargestellt. Betrachtet wird ein System für die induktive Energieübertragung zum kontaktlosen Laden eines Elektrofahrzeugs. In einem solchen System wird ein magnetisches Wechselfeld 106 im Frequenzbereich von beispielsweise 25...150kHz erzeugt. Dabei muss beachtet werden, dass außerhalb dieses Frequenzbandes die Grenzwerte für die Emission
elektromagnetischer Wellen durch international gültige Normen festgelegt sind. Um diese Grenzwerte einzuhalten ist es entscheidend, dass das magnetische Wechselfeld 106 mit der Grundschwingung im Bereich 25...150kHz arbeitet und nur sehr geringe Oberwellen enthält.
Anderseits soll aber der Wirkungsgrad der Leistungsübertragung möglichst hoch sein und deshalb wird mit elektronischen Schaltern innerhalb eines Wechselrichters 201 ,
beispielsweise mittels MOSFETs, IGBTs, ein Rechtecksignal mit der Grundfrequenz des magnetischen Wechselfeldes erzeugt, denn so ergeben sich sehr geringe Verluste. Das Rechtecksignal enthält aber beträchtliche Oberwellen. Diese Oberwellen lassen sich sehr gut mit einem Filter 200, beispielweise einem LC-Filter 200 ausfiltern. Das Filter 200 kann dabei unterschiedlich ausgeführt sein. Beispielhaft ist in Fig. 2 ein Filter 4. Ordnung 200 dargestellt, aber es sind auch andere Anordnungen von Kondensatoren und Spulen möglich. An dem Eingang 206 des Filters 200 liegen der Eingangsstrom lin und die Eingangsspannung Uein oder Uin an. Das Filter 200 weist zwei in Serie geschaltete Eingangsspulen La1 und La2 und den Filter-Eingangskondensator Ca sowie die in Serie geschalteten Ausgangsspulen Lb1 und Lb2 und den Filter-Ausgangskondensator Cb auf. Statt der zwei in Serie geschalteten Eingangsspulen La1 und La2 kann auch eine einzige Eingangsspule La genutzt werden. Statt der zwei parallel geschaltete Eingangsspulen Lb1 und Lb2 kann auch eine einzige Eingangsspule Lb genutzt werden.
Zwei (zweipolige) Bauteile sind in Serie geschaltet, wenn sie nur einen Anschluss gemeinsam haben und sie sind parallelgeschaltet, wenn sie an beiden Anschlüssen miteinander verbunden sind.
Die Eingangsspulen La1 und La2 sind direkt mit dem Ausgang des Wechselrichters 201 verbunden. Hierbei mag direkt bedeuten, dass kein weiteres Bauelement
dazwischengeschaltet ist. Ein in Serie geschalteter Kondensator soll dabei eine direkte Verbindung nicht zu einer indirekten Verbindung machen. Die Ausgangsspulen Lb1 und Lb2 am Ausgang 207 des Filters 200 sind direkt mit den Spulen La1 und La2, sowie dem Primärresonanzkreis 202 verbunden. Der Primärresonanzkreis 202 wird mit der
Spannung U1 und dem Strom 11 oder IL versorgt, der aus der von dem Wechselrichter 201 erzeugten Wechselstrom hervorgegangen ist. Aufgrund der Filterwirkung des Filters 200 weisen der Primärstrom 11 und die Primärspannung U1 einen sinusförmigen Verlauf auf.
Der Primärresonanzkreis 202 weist die Primär-Resonanzspule L1 und den Primär- Resonanzkondensator C1 auf. Der Primärresonanzkreis 202 wandelt den Strom 11 und die Spannung U1 in das magnetische Wechselfeld 106. Das magnetische Wechselfeld 106 koppelt mit einem Koppelfaktor k in den Sekundärresonanzkreis 203 und überträgt
die Energie aus dem Primärkreis durch eine resonante und induktive Energieübertragung an den Sekundärkreis 203.
Der Sekundärresonanzkreis 203 weist die sekundär-Resonanzspule L2 und den
Sekundärresonanzkondensator C2 auf. Da der Sekundärresonanzkreis 203 auf die Resonanzfrequenz des Primärresonanzkreises 202 eingestellt ist, wird der
Sekundärresonanzkreis 203 durch das Magnetfeld 106 so weit zu einer Schwingung angeregt, dass sich der Sekundärstrom I2 und die Sekundärspannung U2 ergeben. Diese werden dem Gleichrichter 204 zugeführt, der einer Last 205, beispielsweise einer Batterie 205, einem Zwischenkreis 205, einem Traktionskreis 205 oder einer HV-DC 205 auf der der Seite des CPM 104 eine Gleichspannung zur Verfügung stellen kann.
Versorgt wird das induktive Ladesystem 100 über eine Gleichspannungsquelle 107 oder HV-DC (High Voltage-Direct Current) bzw. über eine Wechselspannung107.
Fig. 3 zeigt das induktive Ladesystem 100 als einen Regelkreis gemäß einem
exemplarischen Ausführungsbeispiel der vorliegenden Erfindung. Mit diesem Regelkreis ist ein sicherer Start eines drahtlosen Leistungsübertragungssystems (WPT, wireless power transfer) möglich. Dieser Regelkreis erlaubt es die Ladeleistung des induktives Ladesystems 100 zu regeln, sowohl beim induktiven Laden als auch beim Start-up, Einschalten oder in der Aufstartphase.
Fig. 4 zeigt eine vereinfachte Darstellung der Regelstrecke 210 gemäß einem
exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Die Regelung eines ICS Systems 100 kann dazu beitragen, die funktionale Sicherheit in einem ICS-System sicherzustellen. Aufgrund der starken Magnetfelder 106, die zur Leistungsübertragung genutzt werden mag es Vorschriften geben, um die Umgebung von einer zu starken magnetischen Strahlung zu schützen. Diese Vorschriften können beispielsweise vorsehen, dass ein Feld 106, das von einem GPM 105 erzeugt wird, ohne dass ein CPM 104 vorhanden ist oder, dass, wenn ein CPM 104 ungünstig mit dem GPM
gekoppelt ist, spätestens nach 2s das Feld 106 abgeschaltet wird. Es ist also
sicherzustellen, dass innerhalb eines Zeitfensters von 2s festgestellt werden kann, dass das GPM 105 und das CPM 104 vorschriftsmäßig über das Feld 106 gekoppelt sind. Ansonsten ist das Feld 106 abzuschalten. Ähnliches gilt für den Kommunikationskanal. Kann über den Kommunikationskanal 101 für 2s kein Signal empfangen werden, wird das System 100 abgeschaltet, da angenommen wird, dass die Übertragung nicht funktioniert.
Ein WLAN 101 , das für die Kommunikation zwischen GPM 105 und CPM 104 genutzt wird, kann eine Zykluszeit bis zu 300ms haben. Um ein schnelles Reagieren innerhalb der vorgegebenen Zeit zu ermöglichen mag es wünschenswert sein, im Wesentlichen ohne die Rückmeldung über die Feedbackstrecke 101 auszukommen und daher ein System einzusetzen, welches im Wesentlichen Parameter nutzt, welche alleine auf dem GPM 105 vorhanden sind und daher im Wesentlichen keine Rückmeldung von dem CPM 104 benötigen. Gemäß Regelkreis 300 mag vorgesehen sein, auf dem GPM 105 die P1 Leistung zu messen und diese zu regeln. Beim Start Up oder Einschalten des GPM 105 wird ein Arbeitspunkt gesucht, an dem sich an P1 eine Leistung von 500W einstellt.
Danach wird die Reaktion des CPM 104 auf diese Leistung P1 abgewartet, welche auf dem CPM 104 gemessen wird und über den Feedbackkanal 101 an das GPM 105 zurückgemeldet wird. Erst wenn diese zurückgemeldete Leistung einen vorgebbaren Schwellwert überschreitet, wird das GPM 105 weiter hochgefahren, um die funktionale Sicherheit beim induktiven Laden weiter einzuhalten. Durch das Übersteigen des
Schwellwertes ist feststellbar, dass ein Arbeitspunkt gefunden ist, mit dem ein im
Wesentlicher gefahrloser Betrieb des Ladesystems 100 möglich ist.
So kann auch festgestellt werden, dass das System innerhalb von Normen vorgegebenen Bereichen betrieben wird. Aus normativen Gründen mag es zu vermeiden sein, ein magnetisches und insbesondere ein elektromagnetisches Feld mit einer hohen Energie „unabgeschirmt“ länger als eine vorgegebene Zeit unkontrolliert zu betreiben. Solch ein unkontrollierter Zustand kann Vorkommen, wenn z.B. ein zu ladendes Fahrzeug wegrollt und dadurch das CPM 104 im Wesentlichen keine Leistung von dem GPM 105 aufnimmt.
Um die Leistung beim Ladevorgang kontrolliert aufzufahren oder bis zur gewünschten Leistung zu steigern, kann ein Kommunkationskanal 101 genutzt werden, um
Rückmeldungen über die empfangene Leistung von dem CPM 104 zu erhalten. Da der Kommunikationskanal 101 jedoch fehlerhaft sein kann und durch die Fehleranfälligkeit ein Ladevorgang abgebrochen werden kann, sieht das System 100 vor, kommunikationslos die Anwesenheit eines Leistungsabnehmers 104 oder des CPM 104 alleine mithilfe des GPM 104 festzustellen oder zu detektieren und alleine mit dem GPM 105 die Leistung kommunikationslos während des Ladevorgangs konstant zu halten, so dass gilt, dass die Leistung P1 im Primärresonanzkreis 202 konstant ist. Wenn die Leistung im
Primärresonanzkreis 202 konstant ist gilt auch, dass die Ausgangsleistung Pout am Ausgang des Gleichrichters 204 und/oder am Ausgang 220 des
Energieübertragungssystems 100 konstant ist.
Sämtliche Ausgangsgrößen des ICS Systems 100 werden in der Messvorrichtung 301 erfasst. Bei den Ausgangsgrößen handelt es sich um die Phase phase, die
Eingangsspannung Ue,n oder U des Filters 200, den Eingangsstrom 11 Eingangskreises 202, den Ausgangsstrom I2 des Sekundärkreises 203 die Ausgangsleistung Pout des Gleichrichters 204 und/oder des Ausgangs 220 des Energieübertragungssystems 100, den Strom I La durch die Eingangsspule La des Filters 200 und den Strom Ibatt durch die Last 205 in dem Zwischenkreis.
Die Stelleinrichtung 201 speichert für die Steuereinheit die Information der Stellspannung. So ist beispielsweise in Fig 3. der Ausgang Sch vorgesehen, der die positive Flanke der gesteuerten bipolaren Spannung oder PWM am Inverter 201 vorgibt und die X-Phase der PWM steuert, d.h die Schalterpaare A, C des Inverters 201 für den Übergang von Low nach High angibt. Das Schaltverhalten, insbesondere der Schaltpunkt Sch wird vorgegeben, indem das Schaltzeitsignal TSChait und das Zeitsignal des Strom- Nulldurchgangs T stromNuiiDurchgang einer Nulldurchgangsmessung des Stromes la oder lLa durch die Spule La ausgewertet wird, um das Schaltverhalten auszuwerten und festzustellen, ob es induktiv oder kapazitiv ist.
Die Regeleinrichtung 302 ist als Phasenregler eingerichtet und nutzt einen
Suchalgorithmus, welcher in einem Frequenz-Duty Raum die multidimensionalen
Begrenzungen umgeht oder ausschließt und einen Arbeitspunkt anhand P1 Leistung sucht.
Auf dem GPM 105 kann eine Wirkleistungsmessung der Leistung P1 durchgeführt werden und mit Hilfe der Messung der Wirkleistung kann der Feldaufbau des Feldes 106 detektiert werden, ohne dass ein CPM 104 dazu benötigt wird. Für die Messung der Wirkleistung ist die Kalibrierung der Blindleistung S1 eine nützliche Maßnahme.
Der Aufstart vom induktiven Laden wird mit einem konstanten Duty-Zyklus und einer variablen Frequenz von dem Wechselrichter 201 oder PWM (Puls-Weiten-Modulation) Generator 201 durchgeführt, wobei es sich bei der variablen Frequenz um eine
Frequenzverschiebung handelt. Die Startfrequenz, bei der der PWM-Generator 201 beginnt, wird bei der maximal-möglichen Frequenz gesetzt, um eine möglichst große Dämpfung zwischen der Eingangsgröße, d.h. dem Duty-Zyklus (Dutycycle) und der Ausgangsgröße von der Primärkomponente 202 der GPM 105 einzustellen. In einem Beispiel beträgt die normale Arbeitsfrequenz für das Magnetfeld 85kHz und dort wird die Resonanz mit der geringsten Dämpfung erwartet. Um nicht der Gefahr ausgesetzt zu sein gleich bei Beginn in einem Bereich mit Resonanzüberhöhung zu starten, wird bei einer Frequenz gestartet, die von der Arbeitsfrequenz entfernt ist.
Diese Regelvorschrift, um eine möglichst große Dämpfung zwischen Duty-Zyklus und Ausgangsgröße herzustellen, bedeutet gleichzeitig, dass die Regeleinrichtung 302 oder der Phasenregler 302 so eingerichtet ist, ein möglichst kleines Verhältnis von Wirkleistung zu Scheinleistung P1/S1 im Primärkreis 202 einzustellen.
Ausgehend von der beim Starten eingestellten maximalen Frequenz nähert sich beim Reduzieren der Frequenz die variable Frequenz an die Resonanzfrequenz der
Primärkomponente 202 oder der Resonanzfrequenz der Sekundärkomponente 203, insbesondere an die Resonanzfrequenz des Primärschwingkreis 202 oder der
Resonanzfrequenz des Sekundärschwingkreis 203 an. Dabei befindet sich die
Primärkomponente 202 auf dem GPM 105 und die Sekundärkomponente 203 auf dem CPM 104 und bei Annäherung bilden die Primärkomponente 202 und die
Sekundärkomponente 203, insbesondere der Primärresonanzkreis 202 und der
Sekundärresonanzkreis 203, einen lose gekoppelten Transformator 211 , zwischen dem sich das zeitlich variierende magnetische Feld 106 ausbildet.
Bildet sich in der Primärkomponente 202 und Sekundärkomponente 203 Resonanz aus, kann über das Feld 106 zwischen Primärkomponente 202 und Sekundärkomponente 203 eine Energie übertragen werden. In anderen Worten stellt sich, wie in Fig.5 dargestellt ist, eine Betriebsfrequenz, Arbeitsfrequenz oder eine optimale Betriebsfrequenz ein, die nahe an einer der zwei resultierenden Resonanzfrequenzen des gekoppelten Schwingkreises inkl. Last liegt und die die Energieübertragung zwischen Primärresonanzkreis 202 und Sekundärresonanzkreis ermöglicht. Es sind sozusagen zwei einzelne Schwingkreise 202, 203 vorhanden, die sich durch die Koppelung beeinflussen. Es ist folglich der primäre Schwingkreis mit seiner Resonanzfrequenz fGPM und der sekundäre Schwingkreis mit seiner eigenen Resonanzfrequenz fCpM vorhanden, die miteinander gekoppelt sind. Somit sind zwei Schwingkreise vorhanden, die sich durch die Kopplung gegenseitig
beeinflussen und eine neue gemeinsame Resonanzfrequenz aufweisen, die es aufzufinden gilt und die von einigen Faktoren abhängig sind, im Wesentlichen dem Abstand und der Ausrichtung der Spulen L1 , L2, und der Ausgangslast.
Dementsprechend bildet sich eine Gesamtübertragungsfunktion über die gesamte Strecke 210 oder den gesamten Regelkreis 210 aus. Die Gesamtübertragungsfunktion des Energieübertragungssystems 100 über die Strecke 210 kann als Stromverstärkung und/oder Spannungsverstärkung sowie durch einen Phasengang beschrieben werden.
Je nach Arbeitspunkt und oder der Kopplung k der Resonanzkreise 202, 203
untereinander stellt sich in einem Beispiel die Arbeitsfrequenz, Betriebsfrequenz oder Resonanzfrequenz zwischen 81.35kHz und 90kHz ein. Da diese zunächst unbekannt ist, muss sie innerhalb dieses Wertebereiches der Frequenz aufgefunden werden. Zum Auffinden wird mit einer Startfrequenz begonnen. Die Startfrequenz kann aus dem Bereich [90 kHz; 81.35 kHz] gewählt werden, bis sie eine Endfrequenz erreicht, die aus dem Bereich [81.5 kHz; 90 kHz] gewählt werden kann. Oder anders ausgedrückt, kann die Frequenz in der Startphase zum Auffinden des Arbeitspunktes beispielsweise von 90kHz bis 81.35 kHz erniedrigt werden. Sollte der Arbeitspunkt aufgefunden worden sein, bevor einen Bereichsgrenze erreicht ist, mag die Frequenz in dem Arbeitspunkt konstant gehalten werden.
Wird nach dem Durchlaufen eines dieser Frequenzbänder bei einem konstanten Duty- Zyklus oder Tastverhältnis eine vorgebbare Mindestleistung nicht erfasst, dann ist das Laden nicht möglich. Wenn also das GPM 105 zwar Leistung überträgt, die von dem CPM 104 empfangene Leistung nicht über einem Mindest-Schwellwert liegt, wird der
Aufstartvorgang des induktiven Ladens abgebrochen. Folglich wird bei einer geringen Kopplung zwischen GPM 105 und CPM 104 das Laden gesperrt oder blockiert. Solch eine geringe Kopplung kann sich bei einer großen Verschiebung zwischen GPM 105 und CPM 104 ergeben. Mit einer Vorsteuerungskennlinie wird dafür gesorgt, dass das Zeitintervall des Aufsstartvorgangs einen vorgebbaren Wert von beispielsweise 2,0s nicht
überschreitet, also des Zeitabschnitts beim induktiven Laden, bevor mit der eigentlichen Leistungsübertragung begonnen wird, insbesondere des Zeitabschnitts, während dem der Arbeitspunkt gesucht wird. Dieses sofortige Abbrechen des Ladevorgangs während der Startphase beim Nichterreichen der vorgebbaren Mindestleistung kann für die Sicherheit beim Aufstart vom ICS sorgen, ohne dass Kommunikation zwischen GPM 105 und CPM 104 nötig ist. Es gibt zwei Vorsteuerungskennlinien. Die erste Vorsteuerungskennlinie variiert die Phasenverschiebung zwischen PWMx 1401 und PWMy 1402 bei einer konstanten Schaltfrequenz und die zweite Vorsteuerungskennlinie sorgt für die
Frequenzänderung bei konstanter Phasenverschiebung bis die Mindestleistung erfasst wird unter Berücksichtigung der maximalen Zeitdauer von 2s für das Auffinden des Arbeitspunktes. Nach einem erfolgreichen Auffinden eines gültigen Arbeitspunktes durch die beiden Vorsteuerkennlinien startet die Leistungsregelung mit Hilfe der Feedback-Loop 101 oder mit Hilfe des Rückkanals 101 unter Einbeziehung des CPM 104.
Je grösser der Abstand zwischen GPM 105 und CPM 104 ist, desto geringer wird die Frequenz, bei der die Leistung oder Energie übertragen werden kann. D.h. je grösser der Abstand zwischen GPM 105 und CPM 104 ist, desto geringer wird ist die
Resonanzfrequenz, oder in anderen Worten ausgedrückt ist die Resonanzfrequenz vom Abstand zwischen GPM 105 und CPM 104 abhängig.
Die Fig. 5 zeigt ein Diagramm einer frequenzabhängigen Leistung P1 während eines Startvorgangs gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung. In dem Diagramm 500 ist ein Frequenzbereich 501 eingezeichnet, in dem die variable Frequenz des Wechselrichters 201 oder des PWM Generators 201 ausgehend von einer oberen Frequenz 502, beispielsweise 90kHz, zu einer unteren Frequenz 503
erniedrigt werden kann, beispielsweise bis zu 36 kHz. Im Diagramm 500 ist an der Abszisse 504 die Frequenz f in kHz und an der Ordinate 505 ist die Wirkleistung P1 in W angetragen, die auf der Seite des GPM 105 gemessen wird. Während die Frequenz f reduziert wird bleibt das Tastverhältnis (Dutycycle) Q der PWM konstant. Wird ein
Arbeitspunkt AP gefunden, bei dem zwischen Primärkreis 202 und Sekundärkreis 203 Resonanz hergestellt ist. d.h. ist die gekoppelte Resonanzfrequenz des lose gekoppelten Transformators 21 1 gefunden, kann das Tastverhältnis (Dutycycle) Q erhöht werden und somit eine höhere Leistung zwischen GPM 105 und CPM 104 ausgetauscht werden In Fig. 5 liegt die Resonanzfrequenz 506 des aus Primärkreis 202 und Sekundärkreis 203 gebildeten Transformators an der Stelle 506, beispielsweise 85kHz. Die
Resonanzfrequenz des Primärkreises 202 alleine, ohne Koppelung mit dem
Sekundärkreis 203, liegt bei fGPM und die Resonanzfrequenz des Sekundärkreises 203 alleine, ohne Koppelung mit dem Primärkreis 202, liegt bei fCpM. Der Schwellwert der im gefundenen Arbeitspunkt AP geforderten Mindestwirkleistung ist durch Bezugszeichen 507 gekennzeichnet. Der Arbeitspunkt AP stellt sich nur ein, wenn auch das CPM 104 in der Nähe des GPM 105 angeordnet ist.
Das GPM 105 kann auch als Basisstation 105 bezeichnet werden. Die Basisstation 105 wird für das Energieübertragungssystem 100 oder das ICS (inductive charging System) 100 genutzt. Die Basisstation 105 weist die Generatoreinrichtung 201 auf, welche zum Generieren einer zeitabhängigen Leistung P1 mit einem vorgebbaren Tastverhältnis Q oder Dutycycle Q und einer vorgebbaren Frequenz f eingerichtet ist. Darüber hinaus weist die Basisstation 105 einen Primärkreis 202 mit einer Primärspule L1 , Lprim und eine Primärmessvorrichtung 301 p zum Messen einer Wirkleistung P1 und/oder einer
Scheinleistung S1 in dem Primärkreis 202 auf. Zur Bestimmung von P1 und/oder S1 misst die Messvorrichtung 301 den Eingangsstrom 11 und die Eingangsspannung Uein des Filters 200. Außerdem weist die Basisstation 105 eine Steuereinrichtung 302 und/oder eine Regeleinrichtung 302 auf der Primärseite auf.
Der Primärkreis 202 ist mit der Generatoreinrichtung 201 und der Messvorrichtung, verbunden. Die Messvorrichtung 301 weist ein Submodul 301 p auf, das für die
Bestimmung von Messwerten des Primärkreises 202 zuständig ist. Dieses Submodul mag als Primärmessvorrichtung 301 p bezeichnet werden und ist ebenfalls mit der
Generatoreinrichtung verbunden. Die Steuereinrichtung 302 und/oder die
Regeleinrichtung 302 ist mit der Primärmessvorrichtung 301 p und der Generatoreinrichtung 201 verbunden, wobei die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 dazu eingerichtet ist, das vorgebbare Tastverhältnis Q konstant zu halten, während sie die vorgebbare Frequenz f 504 ausgehend von einer Startfrequenz 502 variiert. Die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 ist auch dazu eingerichtet, mit der Primärmessvorrichtung 301 p die Wirkleistung P1 und/oder die Scheinleistung S1 zu messen während sie die vorgebbare Frequenz variiert.
Die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 ist dazu noch so eingerichtet, dass beim Überschreiten eines vorgebbaren Wirkleistungsgrenzwertes P1x 504 und/oder Scheinleistungsgrenzwertes S1x 507 die vorgebbare Frequenz 506 konstant zu halten und das vorgebbare Tastverhältnis zu variieren und eine vorgebbare Kombination von Werten für die vorgebbare Frequenz f und das vorgebbare
Tastverhältnis Q beim Variieren der Frequenz f und/oder beim Variieren des
Tastverhältnisses Q auszuschließen. In anderen Worten mag die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 eine vorgebbare Anzahl von Wertpaaren aus Frequenzwerten und Tastverhältniswerten gespeichert haben, die beim Durchlaufen der variablen Frequenz f und dem konstanten Tastverhältnis Q nicht eingenommen werden.
Ein Ausschlusskriterium zum Ausschließen oder zum„Umfahren“ einer vorgebbaren Kombination von Werten für die vorgebbare Frequenz f und das vorgebbare
Tastverhältnis Q beim Variieren der Frequenz und/oder beim Variieren des
Tastverhältnisses kann beispielsweise aus der Gruppe der Ausschlusskriterien ausgewählt sein, wobei die Gruppe aus dem kapazitivem Schalten, der
Auslegungsgrenze elektrischer Bauteile, dem Ausschlusskriterium dass die vorgebbare Mindestausgangsleistung Pout unterschritten ist, dem Ausschlusskriterium, dass Mindestausgangsleistung Pout zu volatil ist und dass ein vorgebbarer
Mindestwirkungsgrad h unterschritten wird besteht. Die Auslegungsgrenze eines elektrischen Bauteils kann in einem Beispiel die Stromtragfähigkeit und/oder die Spannungsfestigkeit des elektrischen Bauteils aufweisen. Das Schaltverhalten, also ob kapazitives Schalten und/oder induktives Schalten des Wandlers 201 vorliegt, kann mit dem Zeitpunktsignal Sch der Steuervorrichtung, Messvorrichtung 301 und/oder des Wandlers 201 und der Zeitpunkt der Stromnulldurchgangsmessung vom Signal lin entsprechend Fig 2 überprüft werden.
Die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 kann zum Ausschließen der vorgebbaren Kombination von Werten für die vorgebbare Frequenz f und das vorgebbare Tastverhältnis Q eine Liste zulässiger Arbeitspunkte und/oder eine multidimensionale Begrenzung in einem Frequenz-Tastverhältnis-Diagramm nutzen.
Die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 der Basisstation 105 weist einen Feedbackanschluss 303 auf, um ein Feedbacksignal 303 einer Remoteeinrichtung 104, insbesondere einer CPM 105 des Energieübertragungssystems 100 zu erhalten, welches die Größe einer Empfangsleistung Pist angibt, die über das
Energieübertragungssystem 100 bei der vorgebbaren Frequenz f und dem vorgebbaren Tastverhältnis Q übertragen wird. Dieser Feedbackanschluss 101 , 303 mag zumindest ein Übertragungsprotokoll aus der Gruppe der Übertragungsprotokolle WLAN, Bluetooth und NFC (near field communication) unterstützen.
Die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 mag einen Anschluss aufweisen über den die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 ein Signal schicken kann, mit dem das Generieren der zeitabhängigen Leistung in der Generatoreinrichtung 201 gestoppt werden kann, wenn die Größe der Empfangsleistung Pist innerhalb einer vorgebbaren Zeitdauer einen vorgebbaren Wert 507 unterschreitet. Die vorgebbare Zeitdauer kann 2 s betragen. Zur Messung dieser Zeitdauer können die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 einen Timer aufweisen. Beim Stoppen werden sämtliche Treiber des Primärkreises 202 deaktiviert, beispielsweise Wandler 201 und Filter 200. Insbesondere wird die H-Brücke mit den Schaltern A, B, C, D des Wandlers 201 in den Zustand versetzt, dass alle Schalter offen sind, d.h. in den Zustand A=B=C=D=offen. Das ist auch der Zustand, in dem Wandler 201 in Fig 2 dargestellt ist. Der Ausgang„phase“ der Steuer- und/oder Regeleinrichtung 302 in Fig. 3 ist der Ausgang zur Ansteuerung der Phasen, um die Phasenverschiebung der Signale PWM-X und PWM-Y an der H-Brücke des Wandlers 201 zu beeinflussen. Um die Treiber zu stoppen oder abzuschalten, wird die H-Brücke durch ein Signal phase = 0 am entsprechenden Ausgang der Steuer- und/oder Regeleinrichtung 302 angesteuert, der bewirkt, dass die generierte Leistung auf einen Sollwert Null reduziert wird, d.h. Psoll = 0.
Der Arbeitspunkt AP wird durch ein Parameter-Tupel 506, 507 angegeben, welches einen Koppelfaktor k, die Induktivität der Primärspule Li, Lprim, eine Versorgungsspannung UBatt, eine erste Kapazität Ca oder eine Eingangskapazität Ca eines Filters 200, eine zweite Kapazität Cb oder eine Ausgangskapazität Cb des Filters 200, das vorgebbare
Tastverhältnis Q und die vorgebbare Frequenz f aufweist.
Die vorgebbare Frequenz f 504 wird absteigend von der Startfrequenz 502 aus dem Bereich [90 kHz; 85 kHz] bis zu einer Endfrequenz 503 variiert, wobei die Endfrequenz aus dem Bereich [ 81 kHz; .36 kHz] gewählt wird.
Die Primärmessvorrichtung 301 p kann so eingerichtet sein, dass sie Messwerte, die beim Messen der Wirkleistung P1 und/oder der Scheinleistung S1 ermittelt worden sind, mittels eines zuvor bestimmten Kalibrierungsfaktors kalibriert. Beispielsweise kann zum
Kalibrieren ein Offsetwert, eine Phasenverschiebung oder eine Haltezeit bestimmt werden, der/die bei künftigen Messungen der Wirkleistung P1 und/oder der
Scheinleistung S1 hinzuaddiert oder subtrahiert wird und oder als zusätzliche Haltezeit eines Sample-and-Hold Glieds. Mit dem Sample-and-Hold Glied kann die
Phasenverschiebung verstellt werden, insbesondere bei einer der Messungen von U1 oder 11 , um einen kalibrierte Leistung zu ermitteln. Die Multiplikation von U*l beinhaltet ein zeitverzögertes Spannungs- und/oder Stromsignal, zB. P(t) = U (t-tca I U )* I (t-tca I U ) .
Die Steuereinrichtung 302 und/oder die Regeleinrichtung 302 kann als FPGA, ASIC, Prozessor oder Mikrocontroller ausgebildet sein.
Das Energieübertragungssystem 100, beispielsweise ein ICS-System 100, weist eine Basisstation 105 oder GPM 105, eine Remoteeinrichtung 104 oder CPM 104 auf, wobei die Basisstation 105 und die Remoteeinrichtung 104 über eine induktive Kopplung und den Feedbackanschluss 303 miteinander lose koppelbar sind. Die Basisstation 105 weist den Primärkreis 202 und die Remoteeinrichtung 104 weist den Sekundärkreis 203 auf. Der Primärkreis 202 weist die Spule L1 und der Sekundärkreis weist die Spule L2 auf. Werden die Spule L1 und L2 aneinander angenähert, können sich Magnetfelder 106, die von den Spulen erzeugt werden, die jeweils andere Spule L1 , L2 durchsetzen. Der Teil des Magnetfeldes, der die jeweils andere Spule L1 , L2 durchsetzt bildet die induktive
Kopplung mit dem Koppelfaktor k oder dem Kopplungsfaktor k. Diese Kopplung bildet einen lose gekoppelten Transformator 211. Der Teil des Magnetfeldes 106, der außerhalb der jeweils anderen Spule L1 , L2 liegt bildet eine Streukapazität. Je geringer der Teil der gebildeten Streu kapazität ist, desto größer ist der Koppelfaktor k. Da jedoch wegen der Beweglichkeit des GPM 105 und CPM 104 zueinander kein Transformator mit einem Kern gebildet werden kann, bei dem der Koppelfaktor k im Wesentlichen konstant ist, ist bei dem lose gekoppelten Transformator der Koppelfaktor variabel und beispielsweise von der relativen Lage des GPM 105 und CPM 104 zueinander abhängig.
Fig. 6 zeigt ein Flussdiagramm für einen induktiven Ladevorgang gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung. Hierbei wird ausgehend von dem Idle-Zustand S601 erkannt, dass ein Ladevorgang gestartet werden soll. Ein auslösendes Ereignis kann beispielsweise sein, dass die Regeleinrichtung 302 oder die Messvorrichtung 301 erkennt, dass sich GPM 105 und CPM 104 zueinander in einen vorgebbaren Abstand bewegt haben. In einem anderen Beispiel kann der Ladevorgang auch von einem CPM 104 gestartet werden.
Es wird in dem Funktionsblock S602 oder Zustand S602 zunächst eine Kalibrierung des ICS Systems 100 und insbesondere der Bauteile des GPM 105 durchgeführt. In diesem Kalibrierungsprozess werden variable und systemspezifische Parameter ermittelt, um die Messvorrichtung 301 zu kalibrieren.
Nach der Kalibrierung wird in den Funktionsblock S603 das induktive Laden einschließlich dem Startup des ICS Systems 100 durchgeführt, wobei der Startup, der Aufstart- oder Startvorgang im Wesentlichen das Auffinden des Arbeitspunktes AP aufweist. Abhängig, von der Erfüllung der funktionalen Sicherheit erfolgt dann im Zustand S603 das Laden mittels des ICS Systems 100 oder das Abschalten des ICS Systems und der Ladevorgang kehrt in den Idle-Zustand S604 zurück. Das Abschalten erfolgt beispielsweise, wenn nicht innerhalb eines vorgebbaren Zeitintervalls oder Zeitfenster mit dem Laden begonnen werden kann. Dieses Zeitintervall kann 2s betragen.
Sowohl bei dem Startup als auch bei dem Ladevorgang in der Ladephase S603 können die während der Kalibrierungsphase S602 aufgefundenen Parameter oder der aufgefundene Kalibrierungsfaktor berücksichtigt werden. Die Kalibrierungsphase S602 wird bei jedem Start eines Ladevorgangs durchlaufen.
Fig. 7 zeigt ein Flussdiagramm für die Ladephase S603 einschließlich des Startups gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung.
Die Ladephase S603 umfasst ein Verfahren zum Steuern und/oder Regeln einer
Basisstation 105 oder eines Energieübertragungssystems 100. Für die Startup-Phase wird ausgehend von einem Idle-Zustand S701 zunächst im Zustand S702 eine
zeitabhängige Leistung mit einem vorgebbaren Tastverhältnis Q und einer vorgebbaren Frequenz f generiert. Im Zustand S703 wird dann begonnen, die vorgebbare Frequenz f ausgehend von einer Startfrequenz 502 zu variieren und gleichzeitig wird das vorgebbare Tastverhältnisses Q konstant gehalten. Während des Variierens der Frequenz f bei konstantem Tastverhältnis Q wird die Wirkleistung P1 und/oder die Scheinleistung S1 in einem Primärkreis 202 der Basisstation 105 mittels der Messvorrichtung 301 gemessen.
Der Startup-Vorgang S702, S703 kann man durch folgende Abläufe zusammenfassen. Es wird bei der maximalen Frequenz gestartet und ein erster Dutycycle wird gestellt. Dann wird Frequenz reduziert bis P=Pstart. Pstart ist Regelungsstartleistung. Das ist die Mindestleistung, bei der der Feedback-Ioop 101 initialisiert wird.
Falls kein Arbeitspunkt AP zu finden ist wird bei niedrigen Frequenzen in die andere Richtung gesucht. Es kann Vorkommen, dass bei einem Aufstart mit fstart = fmax der Arbeitspunkt aufgrund von einer Zustandsüberschreitung, wenn zB lin > linmax d.h. der Strom lin durch das Filter 200 überschreitet einen Schwellwert bei einer Frequenz fmin<f(linmax)<fmax nicht gefunden werden kann lin ist der Strom durch La und Ib ist der Strom durch Lb. Der Strom lin über La wird gemessen. Der Strom Ib über Lb kann über den anderen Parameter berechnet werden oder auch erfasst oder gemessen werden. In einem Beispiel kann die Vorsteuerungsrichtung umdrehen und bei der kleinen Frequenz starten, mit einem anderen Default-Dutycycle und dann kann die Frequenz erhöht
werden, so dass ein stabiler Arbeitspunkt AP bei einer Frequenz fAP 506 bei fAP < f(linmax) gefunden werden kann.
Falls nach dem Durchlaufen des Frequenzbandes 501 in beiden Richtungen kein
Arbeitspunkt AP gefunden wird, werden die Filterkapazitäten Ca, Cb umgeschaltet. Die Verstellung von Ca, Cb verstellt auch die Eingangsimpedanz und somit die Phasenlage von lin zu Uin über dem Frequenzband [80 - 90kHz] Die kapazitiven Bereiche mit einer ersten Konfiguration, die ausgeschlossen werden sollen, sind mit anderen
Konfigurationen unter Umständen nicht mehr kapazitiv und damit brauchbar. Das
Wegschalten von einem halben Ausgangskondensator Cb/2 und Zuschalten von weiteren Eingangskondensatoren Ca des Filters 200 führt zu einer Erhöhung der Phasenreserve und somit zu induktivem Schaltverhalten. Dieses Zu- und Wegschalten mag jedoch zu höheren Verlusten und/oder zu einer Leistungsreduktion führen und deswegen wird in einem Beispiel immer mit der Konfiguration gestartet, die die„größten kapazitiven
Bereiche“ beinhaltet.
Falls trotz Suche in beide Richtungen und Umschalten der Kapazitäten Ca, Cb immer noch kein AP gefunden ist wird im Zustand S704 die Auffstartphase abgebrochen und das ICS System 100 abgeschaltet. Es wird folglich ausgehend von einem oberen
Frequenzbereich und dann ausgehend von einem unteren Frequenzbereich immer wieder bewertet, ob ein gültiger Arbeitspunkt AP bereits gefunden ist und wenn dieser gefunden ist wird gestartet. Ansonsten wird abgebrochen.
Nachdem das Überschreiten eines vorgebbaren Wirkleistungsgrenzwertes P1x 507 und/oder Scheinleistungsgrenzwertes S1x 507 in dem Funktionsblock S704 erkannt worden ist, erfolgt im Zustand S705 ein Variieren des vorgebbaren Tastverhältnis Q bei gleichzeitigem konstant Halten der vorgebbaren Frequenz f, 506. Während die
vorgebbare Frequenz und/oder das vorgebbare Tastverhältnis Q variiert wird, also während der Zustände S703 und S704 erfolgt ein Überwachen oder Ausschließen einer vorgebbaren Kombination von Werten für die vorgebbare Frequenz f und das vorgebbare Tastverhältnis Q. Es wird der Ladevorgang gestartet.
Wird jedoch der Arbeitspunkt AP, der durch den vorgebbaren Wirkleistungsgrenzwert P1x 507 und/oder Scheinleistungsgrenzwert S1x 507 gekennzeichnet ist, nicht innerhalb einer vorgebbaren Zeit von beispielsweise 2s erkannt, wird der Funktionsblock S705 übersprungen und der Ladevorgang nicht gestartet oder abgebrochen.
Das Verfahren endet in dem Idle-Zustand S706.
Im Folgenden soll auf weitere Einzelheiten der in Fig. 3 dargestellten Steuereinrichtung 302 und/oder Regeleinrichtung 302 eingegangen werden. Die Steuereinrichtung 302 und/oder Regeleinrichtung 302 ist als Phasenregler ausgeführt. Er erhält einen Leistungs- Sollwert Psoll und einen Leistungs-Istwert Pist. Die lose Kopplung des Primärkreises 202 und des Sekundärkreises 203 bei Annäherung bildet einen Resonanztransformator 21 1 oder einen Resonanzkonverter 211. Das Ziel des Frequenzreglers 302 im
Resonanzkonverter 21 1 ist die Suche oder Einstellung eines Arbeitspunktes AP bei dem der Wirkungsgrad h möglichst groß ist, also bei dem die Bedingung h— > 1 und bei dem ein induktives Schalten stattfindet. In diesem Zusammenhang bedeutet induktives Schalten, dass der PWM Generator 201 das Filter 200 als eine induktive Last sieht, d.h. der Strom soll der Spannung so weit nacheilen, dass die Kommutierung der Spannung im Generator 201 oder Wechselrichter 201 beim Öffnen der Schalter erfolgt.
Das Filter 200 dient im Wesentlichen dazu, Oberwellen, die bei der Erzeugung des Rechtecksignals der PWM des Generators 201 entstehen auszufiltern, um dem
Primärkreis 202 ein möglichst sinusförmiges Signal bereitzustellen. Das Filter 200 kann beispielsweise um das Einstellen des induktiven Schaltverhaltens zu ermöglichen einstellbar sein. Gleichzeitig kann ein ZVS Schalten (Zero Voltage Switching) der Schalter des Generators 201 ermöglicht werden, um Verluste zu reduzieren. Das Filter 200 kann an den jeweiligen Arbeitspunkt angepasst werden.
Der Arbeitspunkt AP ist definiert als der Punkt, bei dem die geforderte Sollleistung Psoll stabil und konstant übertragen werden kann. Nachdem der Arbeitspunkt AP erreicht ist sorgt der Regler 302 oder die Regeleinrichtung 302 dafür, dass zumindest drei
Randbedingungen eingehalten werden. Eine erste Randbedingung ist das induktives
Schaltverhalten des Generators 201 und die Strombegrenzung. Die Strombegrenzung, insbesondere die Schaltstrombegrenzung begrenzt den Filterstrom lin durch La. Induktives Schalten wird über die Zeitmessung des Nulldurchgangs vom Strom L festgestellt und, durch Verändern des Schaltzeitpunkts der Eingangsspannung Uein oder Uin oder durch verschieben der Ansteuerfrequenz eingestellt.
Diese Strombegrenzung und das induktive Schaltverhalten dient der Sicherheit. Eine weitere durch den Regler 302 einzuhaltende Randbedingung ist dafür zu sorgen, dass nach der Aufstartphase S703 ein konstantes Laden mit einer konstanten Ladeleistung Psoll erfolgt. Außerdem soll der Regler als weitere Randbedingung dafür sorgen, dass während des Ladevorgangs im Zustand S705 Wirkungsgrad Maximieren h maximiert wird, um einen optimalen Betrieb zu gewährleisten. Da nicht immer alle drei Randbedingungen gleich gut erfüllt werden können, kann der Regler 302 eine Priorisierung der
Randbedingungen vornehmen. Dabei erhält die sicherheitsrelevante Randbedingung eine höhere Priorität als die Randbedingung, die die Ladeleistung Psoll betrifft. Diese zweite Randbedingung hat jedoch wiederum eine höhere Priorität als die Randbedingung, die den optimalen Betrieb betrifft.
Als Stellparameter kann der Regler 302 die Betriebsparameter des Generators 201 beeinflussen. Die Betriebsparameter des Generators 201 weisen die Frequenz / und/oder Periode der PWMx/y Signale T, sowie die Phasenverschiebung Q der beiden Signale PWMx und PWMy zueinander auf.
Fig. 14 zeigt ein Zeitdiagramm oder Ansteuerschema für die Ansteuerung des Wandlers 201 zur Erzeugung einer PWM am Eingang 206 des Filters 201 gemäß einem
exemplarischen Ausführungsbeispiel der vorliegenden Erfindung. Das erste Zeitdiagramm 1401 zeigt das erste Ansteuersignal PWMx 1401 für die erste Schaltergruppe A, C und das zweite Ansteuersignal PWMy 1402 für die zweite Schaltergruppe B, D als
Zeitdiagramm. Dabei bedeutet ein High-Wert oder 1 , dass der Schalter eingeschaltet ist und 0 oder„Low“, dass der Schalter ausgeschaltet ist. Aus dem Angegebenen
Schaltmuster ergibt sich als Ergebnis ein Spannungsverlauf L , Uein 1403 der zwischen einem positiven und negativen Spannungswert schwankt. Als positive Flanke wird ein Signalwechsel von 0 nach 1 und als negative Flanke wird ein Signalwechsel von 1 nach 0
verstanden. Die Positiven Flanken des ersten Ansteuersignal PWMx 1401 und des zweiten Ansteuersignal PWMy 1402 sind um eine Zeitverschiebung t verschoben. Diese Zeitverschiebung entspricht einer Phasenverschiebung der PWM Signale. Die
Zeitverschiebung zeigt sich in dem resultierenden Spannungsverlauf als eine
Impulsbreite, die in das Tastverhältnis q=2p— umgerechnet werden kann. Die
Periodendauer des resultierenden Spannungsverlaufs ergibt sich als zeitlicher Abstand zwischen zwei gleichen Signalzuständen und ist mit T gekennzeichnet. Bei dem Signal PWMx 1401 und PWMy 1402 handelt es sich um Rechtecksignale mit denen der
Generator 201 die Schaltergruppe A, C bzw. B, D einer Vollbrückenschaltung oder H- Brücke über die Periodendauer T ansteuert. Die Frequenz / gibt die Zahl der
Zustandswechsel innerhalb von T an. Dadurch entsteht das Tastverhältnis Q.
Die Konfiguration des Systems 100 wird durch den inneren Parameter des Systems festgelegt. Die Systemparameter, die je nach Position von GPM 105 und CPM 104 zueinander und Batteriespannung UBatt den Raum aller möglichen Arbeitspunkte aufspannen, sind der Koppelfaktor k, die Induktivität der Primärspule LI oder Lprim, die Ausgangsspannung oder Zwischenkreisspannung UBatt und die schaltenden Kapazitäten Ca, Cb die über Schalter verstellt werden, so dass sich die Kapazitäten aus einer Vielzahl CaX, CbX von Kapazitäten ergeben, deren Kapazitäten addiert werden Ca =
{Ca0,Ca0+CaX}, Cb = {Cb0,CbX}. Somit weist das Filter 200 ein Array von parallel und/oder seriell geschalteten Kapazitäten auf, die bei Bedarf zu- und weggeschaltet werden können. Es ist auch möglich ein Array von parallel und/oder wegschaltbaren Spulen entsprechend zu nutzen. Davon sind UBatt, Ca, Cb durch die Vorgaben bei der Herstellung bekannt. Das heißt, dass ein Arbeitspunkt AP durch die folgende
Parameterkombination oder das Parameter-Tupel definiert wird:
k, Lprim, UBatt, Ca, Cb, Q, f
Bei einer Analyse von Kurvenscharen für variable Frequenz f, variables Tastverhältnis Q oder variablem Dutycycle Q und pro Kurve konstantem Koppelfaktor k sowie konstanter Induktivität der Primärspule LI oder Lprim als auch konstanter Ausgangsspannung UBatt,
hat sich gezeigt, dass, um die Leistung PI konstant zu halten, die Steilheit der Kurve vergrößert mit sinkender Kopplung k. Es handelt sich somit bei dem Auffinden eines Arbeitspunktes um eine Steuer- und/oder Regelaufgabe, die ein hoch sensitives System beherrschen muss. Der Regler 302 sollte daher so dimensioniert werden, dass ein Kompromiss zwischen Regler-Dynamik, Auflösung und Robustheit gefunden werden. Da die Auflösung vom Messsystem und Hardwarekomponenten und den verwendeten Bauelementen festgelegt wird, basiert die für das Verfahren für die Arbeitspunktsuche, das für den Regler 302 genutzt wird, auf einem Verfahren, bei dem die Dynamik der Arbeitspunktssuche beschränkt wird, so dass die Arbeitssuche in sehr kleinen Schritten gemacht werden kann, d.h. mit sehr kleinen Frequenzänderungen. Durch diese kleinen Schritte wird vermieden, dass auch bei den Arbeitspunkten AP, in denen eine kleine Arbeitsfrequenzvariation in einem Zeitintervall DeltaT zu einer relativ großen
Leistungsänderung führt, keine Stabilitätsprobleme oder Überschwinger entstehen. Die Arbeitsfrequenzvariation ist als Verhältnis der Änderung der Arbeitsfrequenz zu dem Zeitintervall Delta(Arbeitsfrequenz)/DeltaT und die Leistungsänderung ist als Verhältnis der Leistungsänderung zu dem Zeitintervall definiert deltaPI/deltaT.
Fig. 8 zeigt ein Diagramm einer dreidimensionalen Darstellung der übertragenen Leistung Pout über der Frequenz / und dem Tastverhältnis Q gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung. Die Abszisse 801 gibt die Frequenz / in kHz von 82 kHz bis 89kHz und die Ordinate 802 gibt das Tastverhältnis Q oder die Phasenverschiebung in Prozent % von 10 % bis 100% an, wobei gemäß Fig. 14 das Tastverhältnis Q oder die Phasenverschiebung auf die Periodendauer bezogen ist, so
Q
dass sich der Prozentwert als y 100 ergibt. Die Farbwerte geben die gemessene Wirkleistung P1 im Primärkreis 202 an.
Die Leistung Pout variiert zwischen 0 kW und 3,3 kW. Es zeigen sich im Wesentlichen 3 Bereiche. Im Leistungsbereich 803 liegt die Leistung in der Größenordnung 3,3kW. Im Leistungsbereich 804 liegt die Leistung in der Größenordnung 0 kW. In den Bereichen 803 und 804 ist ein induktives Schalten möglich, d.h. das Filter 200 verhält sich wie eine induktive Last oder die Randbedingung des induktiven Verhaltens ist erfüllt. In den Bereichen 805 zeigt sich ein kapazitives Verhalten. Daher wird die Regeleinrichtung 302
so eingerichtet, dass sie das Auftreten entsprechender Wertekombinationen der Frequenz / und dem Tastverhältnis Q vermeidet.
Fig. 9 zeigt ein Diagramm einer dreidimensionalen Darstellung des Wirkungsgrades h über der Frequenz / und dem Tastverhältnis Q gemäß einem exemplarischen
Ausführungsbeispiel der vorliegenden Erfindung. Der Wirkungsgrad ist in Fig. 9 qualitativ aufgetragen Im Bereich 904 ist der Wirkungsgrad gering und im Bereich 905 ist der Wirkungsgrad hoch.
Aus Fig. 8 lässt sich ableiten, dass eine hohe Leistungen Pout oft bei kleinen Frequenzen mit einem kleineren Duty erreicht werden können im Vergleich zu hohen Frequenzen. Aus dem Wirkungsgrad-Diagramm der Fig. 9 lässt sich ableiten, dass hohe Wirkungsgrade sowohl in den tiefen als auch in den hohen Frequenzbereichen auftreten können, wobei ein guter Wirkungsgrad für die meisten Konfigurationen im Frequenzbereich 81 ...85kHz, d.h. im Bereich [81 kHz; 85 kHz] auftritt. Dieser Frequenzbereich ist mit Bezugszeichen 806 gekennzeichnet und ist ein Teil des zugelassenen Frequenzbereichs 501. Es kann sich somit ein Hinweis darauf entnommen werden, dass eine beispielhafte
Systemkonfiguration (Ca, Cb, La, L1 , C1 , L2, C2) in diesem unteren Band 806 von 501 aufgrund von der Konfiguration des Gesamtsystems, die höchsten Wirkungsgrade erreicht. Für eine andere Systemkonfiguration kann sich ein anderes Bild ergeben.
Daher wird der Regler 302 so eingerichtet, dass bei einer hohen Frequenz als Startpunkt bei der Suche des Arbeitspunktes AP startet. Bei hohen Frequenzen verursacht eine kleine Änderung der Frequenz / oder eine kleine Änderung des Dutys Q oder der Phasenverschiebung Q wegen der geringeren Sensibilität in diesem Bereich, eine geringere Änderung der Leistung wie bei kleinen Frequenzen. Folglich ist die
Änderungsrichtung von hohen Frequenzen zu geringen Frequenzen der
Änderungsrichtung von geringen Frequenzen zu hohen Frequenzen vorzuziehen, obwohl beide Regelverhalten des Reglers 302 möglich sind. In einer Einstellphase sollte der Regler 302 dahingehend überprüft werden, dass eine spezielle Konfiguration des Reglers 302 auch die Bedingung erfüllt, dass eine Verringerung der Frequenz zu einer lokalen Verbesserung des Wirkungsgrads führt. Oder anders ausgedrückt, dass
dPout d Pout
[fgroß) < - [fklein) gilt, wobei fgroß eine große Frequenz und fgroß eine kleine df d f
Frequenz bezeichnet. Denn nicht für jede Konfiguration mag diese Bedingung erfüllt sein. In den Diagrammen nach Fig. 8 und 9 können in anderen Konfigurationen und bei anders gewählten Parametern auch lokale Optima des Wirkungsgrads h bei hohen Frequenzen auftreten. Pout gibt die Ausgangsleistung des CPM 104 am Ausgang 220 an. Das GPM 105 erhält die Information über die Ausgangsleistung Pout über den
Kommunikationskanal 101 , beispielsweise WLAN, von der CPM 104 alle 100ms.
Es gilt jedoch immer, dass bei kleinen Leistungen wie im Bereich 804 auch der
Wirkungsgrad sinkt, wie der Bereich 904 zeigt. Es wäre deswegen denkbar je nach Sollleistung einen Sollwert h soll ( Psoll ) für den Wirkungsgrad zu setzen, um kleine Schwankungen um den Arbeitspunkt zu verhindern. Ist die Verbesserung des
Wirkungsgrads aber besser als dh soll die Frequenz immer noch variiert werden.
Der Regler 302 kann auch so eingerichtet sein, zu erkennen, dass sich das
Schaltverhalten des ICS Systems 100 in Richtung eines kapazitiven Verhaltens bewegt, dass also Parameterkombinationen auftreten können, die zu einer Leistung führen, die in dem kapazitiven Bereich 805 liegt, kann der Regler 302 Schaltmaßnahmen an dem Filter 200 durchführen, die die physikalische Konfiguration des Filters 200 so ändern, dass wieder ein induktiver Betrieb möglich ist. Beispielsweise könnte ein zusätzlicher
Kondensator zu dem Eingangskondensator Ca und/oder zu dem Ausgangskondensator Cb parallelgeschaltet werden oder ein Array von Filtern, um ein umschaltbares Filter zu bilden.
In einem Betrieb des Reglers ist davon auszugehen, dass ein Großteil der Frequenz-Duty Bereiche, die durch Frequenz-Duty-Tupel angegeben werden können, nicht zulässig ist und daher von dem Regler 302 zu vermeiden oder zu umfahren sind oder durch andere geeignete Maßnahmen, wie dem Schalten des Filters 200, zu umgehen sind.
Insbesondere können solche verbotenen Bereiche vor allem bei kleinen Kopplungen k groß ausfallen. Dies hat zur Folge, dass der Regler 302 im Wesentlichen ständig die Grenzen zwischen induktivem und kapazitiven Bereich überwachen muss und dass eine geeignete Aufstartstrategie oder ein Regelverhalten für den Regler 302 für den Startup
gefunden werden muss um in die gewünschten Arbeitspunkte reinzukommen. Eine Umschaltung von Kapazitäten Ca, Cb ist auch nötig, um bei kleiner und großer Kopplung die volle Leistung, in Fig. 8 Pout = 3.3kW, Bereich 803 übertragen zu können. Der Leistungsregler in 302 ist als PI-Regler ausgeführt.
Fig. 10 zeigt ein linearisiertes Ersatzschaltbild des ICS Systems 100 aus Fig. 2 gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung. Dieses linearisierte System reicht vom Inverter 201 oder Generator 201 zu der Batterie oder Last 205. Dieses linearisierte System kann bei einer sinusförmigen Anregung Durch Generator 201 angenommen werden.
Der Gleichrichter 204 wurde durch ein RC-Glied 205‘ ersetzt, welches das System aus Gleichrichter und Batterie für ein vorgegebenes Parameter-Tupel k, Ubatt, Pout im linearisierten Modell abbildet. Die Frequenzabhängigkeit wurde aufgrund des kleinen Einflusses für die Berechnung nicht berücksichtigt. Für eine maximale Leistung ist der Strom im Sekundärkreis I2eff = 16.67A. Aus diesem Wert kann man alle anderen
Effektivwerte im System für k, L1 , Ubatt, Pout für die Systemdimensionierung berechnen
Diese Effektivwerte k, L1 , Ubatt, Pout wurden für eine Batteriespannung von U=350V und eine Ausgangsleistung Pout=3.3kW berechnet. Die Bedingungen im Arbeitspunkt lauten wie folgt:
- Uin < 350Veff
- Uin/cos(phi) < 350Veff
- Induktiv
- la, Ib < 35Aeff
- 11 < 28Aeff
werden diese Bedingungen eingehalten, so wird parallel mithilfe vom Frequenzregler (nicht gezeigt in Fig. 3) der optimale Arbeitspunkt, in dem die Verluste minimal sind, für die Konfiguration {P,Ubatt,k,L1 ,L2} gesucht, geometrisch und lastabhängig. Diese Bedingungen sind harte Bedingungen, also Bedingungen, die für ein spezifisches System eingehalten werden müssen.
Es gibt in Kontinuum unendlich vieler Arbeitspunkte stationäre Arbeitspunkte sind definiert als Arbeitspunkte, bei denen die Leistung insbesondere die Sollleistung konstant gehalten wird. Arbeitspunkte, die anfahrbar sind, d.h. von P = Pstart = 500W bis P = Psoll sind mögliche Arbeitspunkte. Auch Punkte, die so nah wie möglich an Psoll liegen sind mögliche Arbeitspunkte. Zusätzlich werden lokale Wirkungsgradmaxima gesucht, von denen es auch mehrere im anfahrbaren Bereich geben kann. Um einen stationären Arbeitspunkt AP zu erhalten muss auch dessen Anfahrbarkeit während der Startup-Phase sichergestellt werden. Die Arbeitspunkte AP, die sich innerhalb des gleichen
abgeschlossenen Gebietes wie der Startpunkt befinden, können mit einer kontinuierlichen Änderung der Frequenz und des Dutycycles erreicht werden. Arbeitspunkte AP, die sich außerhalb dieses Gebietes befinden, können nur erreicht werden, indem der Regler einen Frequenz- / Dutysprung durch die verbotenen Gebiete durchführt. Zusätzlich ist es zu bedenken, dass bei mehreren lokalen Optima der Arbeitspunkt AP gewählt wird, der am nächsten zum Ausgangspunkt ist (lokaler Frequenzoptimierer) AP. In anderen Worten bedeutet das, dass die Betriebsstrategie die Leistung von 500W bis P = Psoll hochfährt und dabei den Dutycycle Q, insbesondere die Phasenverschiebung t, nach oben limitiert, um Strom- und Spannungsgrenzen einzuhalten, und nach einer Frequenz sucht, die erlaubt, dass der Dutycycle wieder erhöht werden kann, so dass die Leistung
hochgefahren wird. Dieser Prozess wird iterativ durchgeführt anhand von
Vorzugsrichtungen durch die Entscheidung, ob die Frequenz inkrementiert oder dekrementiert werden soll. Die Entscheidung über die Vorzugsrichtung wird wiederrum abhängig von den elektrischen Zuständen gemacht. In einem Beispiel wird nach einem Optimum mithilfe eines maximalen Power-Point-Trackers gesucht und eine Indikation eines hohen Stromes la genutzt, um die Frequenz zu reduzieren und ein kapazitives Schaltverhalten als Indikator genutzt, um die Frequenz zu inkrementieren.
Durch Einhalten der Randbedingungen kann der Regler im Resonanzkonverter des GPM 105 zusätzlich mit L2 und C2 für eine stabile Energieübertragung sorgen, dass im
Wesentlichen Pout konstant bleibt, obwohl sich evtl Parameter wie der Koppelfaktor k ändern, beispielsweise wenn sich bei einem Laden eines Autos während der
Energieübertragung ein Abstand zwischen GPM 105 und CPM 104 verringert. Da die Effizienz maximiert wird und zugleich die Zustände des Systems überwacht werden müssen, kann man die Integration vom Regler mit der Maximierung der Effizienz und die Limitierung der Zustände als Optimierungsproblem beschreiben.
Im Folgenden soll weiter auf die im Zustand S602 durchgeführte Kalibrierungsphase eingegangen werden, die spezifische Parameter oder einen Kalibrierungsfaktor bestimmt, um die Messvorrichtung 301 korrekt betreiben zu können.
In dem ICS (Inductive charging System) 100 wird die Primärleistung P1 von dem Regler 302 geregelt. Den Wert der Primärleistung P1 erhält der Regler 302, wie in Fig. 3 dargestellt, von der Messvorrichtung 301 über die Verbindung 303, 101 , die mit dem Ausgang Pout der Messvorrichtung 301 verbunden ist. Pout ist die Leistung am Ausgang 220 der CPM 104 über dem Widerstand 205.
Aufgrund von Toleranzen, beispielsweise durch die Streuung des Magnetfelds 106 und verschiedene Gerätekonfigurationen, z.B. dem Einsatz eines Filters 4. Ordnung für das Filter 200, ändert sich die von der Messvorrichtung 301 erfasste Phasenverschiebung von Strom zu Spannung im Primärfeld, d.h. in dem Feld, welches von der Primärspule L1 erzeugt wird. Diese Phasenverschiebung betrifft die Phasenverschiebung der Messung, nicht die Phasenverschiebung der realen Zustände. Das bedeutet, dass obwohl das System 100 und insbesondere der Primärkreis 202 mit einer realen oder tatsächlichen Phasenverschiebung arbeitet und so tatsächlich eine Leistung P1 erzeugt wird, geht der Regler 302 und/oder die Messvorrichtung 301 von falschen Werten für die
Phasendifferenz zwischen Strom und Spannung und somit auch von einer falschen Leistung P1 oder Pist aus. Obwohl demnach in dem System 100 tatsächlich eine Leistung P1 vorhanden ist, geht der Regler 302 von einer verfälschten Leistung Pist aus. Zu der Verfälschung der Leistung kommt es, da durch die Phasenverschiebung Winkelfehler entstehen. Denn das eingesetzte Verfahren zur Leistungsmessung in der
Messvorrichtung 301 berechnet die Leistung P1 aus der Bewertung der Phasenlage zwischen Strom 11 und Spannung U1.
Zur Behebung der aufgrund der Winkelfehler hervorgerufenen Messfehler kann bei der Leistungserfassung eine Sample-Hold-Einrichtung 1 103 in der Messvorrichtung 301 vorgesehen werden, welche eine Korrektureinrichtung aufweist, die dazu eingerichtet ist, eine Zeitverzögerung oder einen Group-Delay einzusetzen, um die Winkelfehler auszugleichen und/oder zu beheben. Dabei wird das„kontinuierliche Messsignal“, d.h. der sinusförmige Strom 11 oder die sinusförmige Spannung U1 digital erfasst und auch über ein Halteglied verzögert, bevor dieses Signal wiederrum mit U1 oder 11 multipliziert wird, somit kann eine positive Phasenverschiebung zu einem der zwei Zeitsignale hinzugefügt werden.
Die Regelung im Regler 302 basiert auf einer Leistungsmessung S1 des Schwingkreises 202, der mit einer Frequenz des Wandlers 201 im Bereich von 80-90kHz und mit einer entsprechend kurzen Periodendauer arbeitet. Die Scheinleistung S1 , die gemessen werden soll, ist sehr hoch und kann in der Größenordnung von 1 100kVA liegen. Während bei einer Leistungsmessung einer Leistung von 50 W bis 500W bei 50Hz ein
Phasenfehler oder eine Totzeit in der Größenordnung 0,1 mb, der/die durch die Messfehler der Hardware in das Ergebnis eingerechnet wird, nur eine geringe Auswirkung hat, macht sich eine Totzeit von 0,1 mb bei einer entsprechend kurzen Periodendauer einer
Schwingung im Bereich von 80kHz bis 90 kHz wesentlich stärker bemerkbar und die Verfälschung des Messergebnisses gegenüber den tatsächlichen Werten der Leistung kann nicht toleriert werden, insbesondere nicht, wenn Arbeitspunkte des ICS Systems eingestellt werden sollen und der Regler 302 eine hohe Sensibilität hat.
Weiter erschwerend bei der Berücksichtigung des Phasenfehlers ist, dass der
Phasenfehler von der Messvorrichtung 301 abhängt und daher von Messvorrichtung zu Messvorrichtung unterschiedlich sein kann und sich selbst bei Messvorrichtungen der gleichen Bauart unterscheiden kann. Da sich somit die Gruppenlaufzeit / Phasendrehung von ICS-System 100 zu ICS System 100 unterscheiden kann, wird das Kalibrieren der Leistung P1 in jeder Aufstartphase S602 vor dem induktiven Laden in der Phase S603 durchgeführt Sie kann parallel mit der Arbeitspunktfindung in der Phase S702, S703 des Ladevorgangs stattfinden. In der Aufstartphase ist die Wirkleistung P1 =0W oder
Primärfeld-Leistung P1 = 0W bei einem geringen Dutycycle, da während der
Aufstartphase noch keine Leistung übertragen werden soll, sondern nur der Arbeitspunkt bestimmt werden soll. Die Kalibrierung auf genau 0W ist sehr schwierig und kann nicht sichergestellt werden, ohne das zugelassene Frequenzband zu verlassen. Man kann aber mit wenig Fehler P1 = 0W annehmen. Obwohl die Wirkleistung P1 im Wesentlichen nicht vorhanden ist, ist allerdings eine hohe Scheinleistung vorhanden. Es gilt P1 «S1. Ist ein zu kleines Frequenzband vorhanden, wird die Leistungsmessung über den cos (0)
Dieses Prinzip, das in Formeln (K7) und (K8) dargelegt wird, sorgt für eine Kalibrierung der Leistung bei geringen Leistungen. Bei großen Leistungen können die Abweichungen grösser sein. Die Regelung der kleinen Leistungen ist aber eine Herausforderung beim ICS da es schwer ist festzustellen, ob ein Arbeitspunkt gefunden ist. Außerdem ist es schwer die Mindestleistung an der Ausgangsseite 220 zu regeln. Oder in anderen Worten ausgedrückt, können mit dieser Winkelanpassungsmethode auch die kleinen Leistungen, d.h. Leistungen mit einem kleinen Verhältnis Wirkleistung zu Scheinleistung P1/S1.
autonom sehr gut gestellt und/oder gesteuert werden, was den autonomen
Leistungsaufstart, also ohne CPM 104 Nutzung, garantiert und zu einer genaueren Leistungserfassung führt. Somit kann auch die Ausgangsleistung Pout am Ausgang 220 sehr genau eingestellt und gesteuert werden
Mit Bezug zu Fig. 4 werden die folgenden Abkürzungen aus Tabelle 1 genutzt.
Tabelle 1

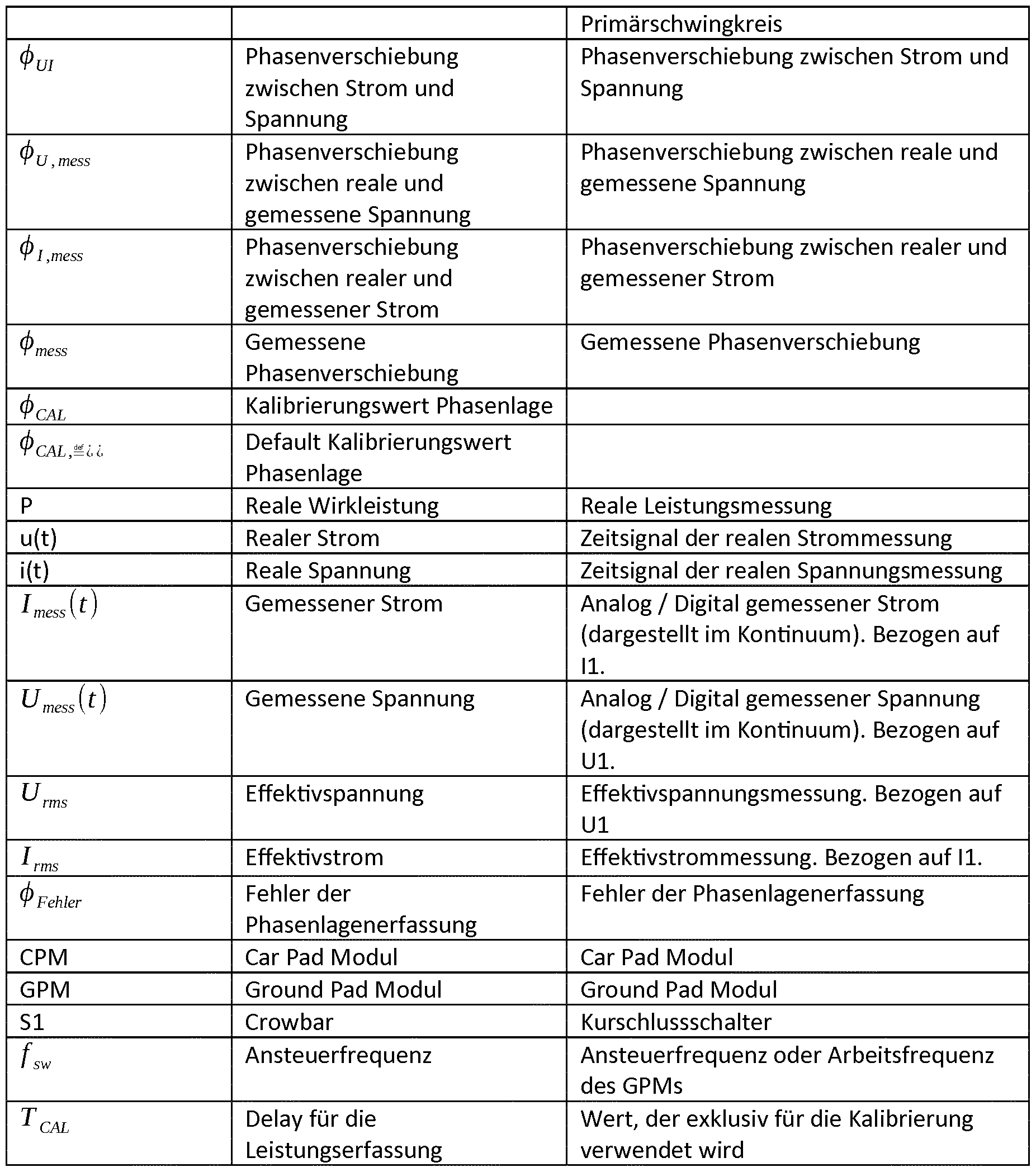
Im Folgenden wird die Leistungsberechnung P1 , S1 im Primärkreis aus dem Primärstrom 11 und der Primärspannung U1 betrachtet. Die Herleitung wird jedoch der Einfachheit halber ohne den für den Primärkreis geltenden Indizes durchgeführt. Trotz der allgemeinen Herleitung ist klar, sich diese auch auf den Primärkreis bezieht.
Die Leistungsmessung erfolgt im Primärkreis 202 auf GPM Seite mittels Messvorrichtung 301. Die Wirkleistungsmessung P_real oder Preai wird mithilfe von dem Effektivstrom lrms, Urms und der Phasenlage f von dem Strom zur Spannung fui ermittelt

Bei Koppelung von GPM 105 und CPM 104 wird ein zeitvariantes magnetisches Feld 106 aufgebaut. Um das Feld 106 für die induktive Kopplung zeitvariant zu machen, erzeugt die Ansteuerung 201 oder der PWM-Generator 201 ein PWM-Signal mit einem Tastverhältnis Q. Das PWM-Signal ist ein Spannungsverlauf, wobei das Tastverhältnis Q in die Höhe einer Spannung umgerechnet werden kann, die wiederum eine zu übertragene Leistung ergibt deren Größe mit dem Tastverhältnis in Verbindung steht. Auf diese Art und Weise lässt sich über das Tastverhältnis Q die übertragene Leistung eines ICS-Systems steuern. Die Eingangsspannung Uein oder Uin ist die Spannung, die der Generator 201 erzeugt und die dem Filter 200 zur Verfügung gestellt wird. Das Filter 200 generiert die
Primärspannung U1 und den Primärstrom 11 für den Primärkreis 202. Der Primärstrom 11 und die Primärspannung U1 werden durch den sich bildenden lose gekoppelten
Transformator 21 1 in den Sekundärstrom I2 und die Sekundärspannung U2 für den Sekundärkreis 203 transformiert. Um die Konvertierung der verschiedenen Spannungen und Ströme ineinander zu beschreiben, lassen sich verschiedene Übertragungsfunktionen definieren.
Die Übertragungsfunktion Gu ( s) ist die Übertragungsfunktion von Eingangsspannung Uin oder Uein zu Primärstrom 11.
Die Übertragungsfunktion
 ist die Übertragungsfunktion von Eingangsspannung Uin oder Uein zu Primärspannung U1.
Die Übertragungsfunktion G u i( s) ist eine Übertragungsfunktion von Primärstrom 11 zu Primärspannung U1.
ist die Übertragungsfunktion von Eingangsspannung Uin oder Uein zu Primärspannung U1.
Die Übertragungsfunktion G u i( s) ist eine Übertragungsfunktion von Primärstrom 11 zu Primärspannung U1.
Die Übertragungsfunktion GI1 I2 {s) ist die Übertragungsfunktion von Primärstrom 11 zu Sekundärstrom I2.
Diese Randbedingungen und Übertragungsfunktionen zeigen wie ein großes P1/S1 Verhältnis eingestellt werden kann. Mit den Übertragungsfunktionen kann ein P1/S1 erzeugt werden kann.
Es soll gelten, dass ||Gm (s
 ^ 0,5, d.h. bei maximalem Sekundärstrom I2. Ist der Betrag der Verstärkung von Primärstrom 11 zu Sekundärstrom I2 größer oder gleich dem Wert 0,5. Das Verhältnis ||Gm (s wird für den Normalbetrieb genutzt und wird bei der Kalibrierung nicht genutzt.
^ 0,5, d.h. bei maximalem Sekundärstrom I2. Ist der Betrag der Verstärkung von Primärstrom 11 zu Sekundärstrom I2 größer oder gleich dem Wert 0,5. Das Verhältnis ||Gm (s wird für den Normalbetrieb genutzt und wird bei der Kalibrierung nicht genutzt.
0,5 < COS(4G;U/I(S)) < 1 , d.h. während eine Energieübertragung des ICS-Systems 100 stattfindet, liegt der Cosinus des Winkels der Übertragungsfunktion von Primärstrom 11 zu Primärspannung U1 zwischen den Werten 0,5 und 1 .
COS(4G;K/I(S))— > 0, d.h. wenn keine Leistung auf die Sekundärseite übertragen werden kann geht der Cosinus des Winkels der Übertragungsfunktion von Primärstrom 11 zu Primärspannung U1. Fälle in denen keine Leistung auf die Sekundärseite übertragen werden kann treten beispielsweise auf wenn keine oder nur eine schlechte Kopplung zwischen GPM 105 und CPM 104 existiert, also wenn k—> 0 gilt oder, wenn der
Ausgangswiderstand gering ist, beispielsweise bei einem Ausgangskurzschluss, also wenn ffo— > 0 gilt. Sollte ein solcher Zustand existieren, in dem keine Leistung auf die Sekundärseite übertragen werden kann, gilt gleichzeitig, dass die Beträge | |Guinui (s)||2 und IIG uini (s)| I sehr groß sind. In anderen Worten bedeutet das, dass mit einem kleinen Dutycycle (und somit eine kleine Eingangsspannung Uin) sowohl ein sehr hoher RMS
(Root Mean Square) Wert im Effektivwert des Stromes 11 wie auch in der Spannung U1 erreicht wird, was zu einem sehr hohen S1 führt.
Die Regeleinrichtung 302 muss mittels der Messvorrichtung 301 die
Ansteuerungsspannung U1 und den Ansteuerstrom 11 überwachen. Dieser Zustand, in dem keine Leistung auf die Sekundärseite übertragen werden kann, darf nicht lang betrieben werden, vor allem für den Fall des Ausgangskurzschlusses, insbesondere den Fall, dass Ro = 0. Zur Detektion solch eines Zustandes ist eine Überstromüberwachung im System 100 vorgesehen. Wenn ein Kurzschluss bei geringer Ansteuerung entsteht, wird diese Schutzfunktion umgangen und unter Umständen wird die Hardware des CPM 104 beschädigt.
Um nun vor der Startup-Phase S702 eine Kalibrierung durchführen zu können, werden mittels Messvorrichtung 301 die sinusförmigen Signale am Ausgang des Filters 200 gemessen, wenn die durch das Rechtecksignal des Generators 201 erzeugten
Oberwellen mittels Filter 200 im Wesentlichen entfernt worden sind. Die Messvorrichtung 301 stellt die sinusförmigen Messsignale im Zeitbereich dar. Diese Darstellung im
Zeitbereich dient im Wesentlichen nur als Beschreibung der Abhängigkeit der Messung mit den Phasenverschiebungen zwischen Strom 11 und Spannung U1. Im Zeitbereich macht sich eine Phasenverschiebung als eine Totzeit bemerkbar.

In anderen Worten bedeutet das, dass aufgrund der Messung ein Phasenfehler oder eine fälschlich ermittelte Phasenverschiebung zwischen der realen Spannung U 1 und der gemessenen Spannung Umess bzw. zwischen realem Strom 11 und dem gemessenen Strom besteht. Allein durch die Messvorrichtung 301 und die unterschiedlichen
Einflussfaktoren auf die Messvorrichtung 301 wird eine Phasenverschiebung (|)u,mess bzw. <|)i,mess beobachtet, die in der Realität gar nicht existiert. Die Phasenverschiebung zwischen Strom und Spannung, welche durch das Filter 200 verursacht wird beträgt fui.
Die Phasenverschiebung fui zwischenl/ l(t)= l/rmsV2sin (cot) und
I l [t ) = Irms'j2sm (a)t +(l)UI) kann unter der Annahme, dass kein Messfehler
1 F U, messt F !, messt F Fehler^ , , , , , . . . .
vorhanden ist, von der Messvorrichtung 301 mit zwei
verschiedenen Verfahren ermittelt werden. Die Messvorrichtung kann mittels der O- Durchgangserkennung oder der Nulldurchgangserkennung vom Strom 11 und von der Spannung U1 die Phasendifferenz mit einem analogen Messverfahren ermitteln, indem die Messvorrichtung 301 die Zeiten der Nulldurchgänge von 11 und U1 bestimmt und daraus die Phasenverschiebung als Zeitdifferenz der Nulldurchgänge ermittelt. Alternativ oder zusätzlich kann die Messvorrichtung 301 die Phasendifferenz zwischen U1 und 11 aus dem Verhältnis aus einer kontinuierlichen Wirkleistungsmessung und
Scheinleistungsmessung als cos (0mess) ermitteln, vgl. Formel (K3). In anderen Worten wird die Wirkleistung P und die Scheinleistung S gemessen und daraus der Wert für cos (0mess) ermittelt. Dieser kann nach der Phase aufgelöst werden und man erhält einen Wert für die Phase 0mess .
Bei einer real mit der Messvorrichtung 301 durch geführten Messung wird sich jedoch ein Messfehler der Phase gegenüber der tatsächlichen Phasenlage ergeben. Dieser
Messfehler tritt in der Form von ^uMbM’ F!·Mb^> F Fehler ^ au^ unabhängig von der Wahl des Messsystems 301 oder der Messvorrichtung 301 sind bei der Erfassung der
Phasenlage Verfälschungen der Phasenlage ^u>fTMKa’ F! mäSS, FRBMM >
 Einfluss der digitalen Filterung, aufgrund von Einflussfaktoren der Analog-Messtechnik, wie Bauteilstreuung oder Bauteiletoleranz, aufgrund von Einflussfaktoren der
Einfluss der digitalen Filterung, aufgrund von Einflussfaktoren der Analog-Messtechnik, wie Bauteilstreuung oder Bauteiletoleranz, aufgrund von Einflussfaktoren der
Systemkonfiguration und/oder weiteren Einflussfaktoren wie Temperatur, und
Alterungseffekte möglich.
Wenn also 0mess gemessen wird setzt sich dieser Wert zusammen aus der tatsächlichen Phasenverschiebung fni zwischen Strom und Spannung, dem Phasenfehler / mess zwischen tatsächlicher Phase des Stromes und gemessener Phase des Stromes, dem Phasenfehler U mess zwischen tatsächlicher Phase der Spannung und gemessener Phase
der Spannung und einem Fehler Feh/er der Phasenlagenerfassung. So ergibt sich als Wert für die gemessene Phasenlage der Wert

Damit kann das Ziel erreicht werden
 d.h. das Kompensieren des Gesamtfehlers über / mess und U mess
d.h. das Kompensieren des Gesamtfehlers über / mess und U mess
Einigen der Einflüsse, die zu einer fehlerhaften Phasenmessung führen, kann
entgegengewirkt werden. Beispielsweise kann der Einfluss der digitalen Filterung im Wesentlichen deterministisch entfernt werden, indem beispielsweise ein Korrekturfilter eingesetzt wird. Die Einflussfaktoren der Analog-Messtechnik können geschätzt werden und dadurch entfernt werden, sie unterliegen aber einer stochastischen Streuung und können daher nicht so gut wie die Einflussfaktoren der digitalen Filterung entfernt werden. Die Einflussfaktoren der Systemkonfiguration, z.B. Impedanzänderungen bei durch nicht beabsichtigt herbeigeführte Änderungen von Cb, aber auch Änderungen in L1 , sind schwierig zu entfernen, denn Impedanzen ändern sich bei verschiedenen
Systemkonfigurationen. Durch Temperatur und Alterung können sich u.U. die
Tiefpasscharakteristik der Messschaltung, die Kapazität Cb des Filters 200 und auch die Induktivität L1 ändern. Diese Einflussfaktoren der Systemkonfiguration können sich von ICS-System 100 zu ICS-System 100 unterscheiden, selbst wenn die ICS-system 100 gleicher Bauart sind. Diese Einflussfaktoren der Systemkonfiguration können jedoch mittels Kalibrierungsmaßnahmen weitestgehend eliminiert werden. Unabhängig von der Fehlerquelle wird über bekannte Systemzusammenhänge der Gesamtfehler korrigiert.
Diese Einflüsse sind geschätzt und werden in einer gerätunabhängigen Konstante „Default Kalibrierungswert Phasenlage“ <pcal, charakterisiert. Hierbei gibt es einen Default-Wert als Referenz, der für alle Systeme 100 gleich ist. Die Systeme 100 kalibrieren sich bei jedem Ladestart in der Kalibrierungsphase S602 von selbst mit der erwähnten Methodik und zwar rekursiv, d.h. immer anhand vom letzten eingestellten Kalibrierungswert aus dem letzten Ladezyklus S603.
Aufgrund der Fehler bei der Bestimmung der Phasenlage, kann man sich nicht sicher sein, ob die Werte mit denen die Messvorrichtung 301 und die Regeleinrichtung 302 arbeiten, auch den tatsächlichen Werten entspricht, und dies sowohl in den Phasen des Startup-Vorgangs S702, S703 als auch der daran anschließenden
Übertragungsleistungsregelung in der Phase S705 also während der Phase des induktiven Ladens S603. Das Voranstellen der Kalibrierungshase S602 kann daher ein genaues induktives Laden ermöglichen, da es im Wesentlichen dazu beiträgt Messfehler zu vermeiden.
Fig. 1 1 zeigt eine Detailansicht der Messvorrichtung 301 mit der Primärmessvorrichtung 301 p oder Primärmesseinrichtung 301 p gemäß einem exemplarischen
Ausführungsbeispiel der vorliegenden Erfindung.
Die Primärmessvorrichtung 301 p zum Messen einer aktuellen Wirkleistung P, P1 in einem Primärkreis 202 eines Energieübertragungssystems 100 weist eine Auswerteeinrichtung 1 101 und eine Kalibriereinrichtung 1 102. Die Auswerteeinrichtung 1 101 weist einen Messanschluss zum Erfassen eines Stroms I 1 mess, einer Spannung U1 mess und einer gemessenen Phasenverschiebung (|)mess zwischen Strom I 1 mess und Spannung U1 mess in dem Primärkreis 202 auf. Der Strom Strom M mess Wird über den Eingang i1 der
Messvorrichtung 301 gemessen. Die Auswerteeinrichtung 1 101 und die
Kalibriereinrichtung 1 102 sind miteinander verbunden und die Auswerteeinrichtung 1 101 ist weiter zum Durchführen einer Leistungsmessung durch Auswerten des erfassten Stromes Imess und der erfassten Spannung Umess eingerichtet. Die Kalibriereinrichtung 1 102 ist ferner zum Korrigieren des erfassten Stroms Imess und/oder der erfassten Spannung Umess über den cos()-Wert der erfassten Phasenverschiebung f 55 zwischen erfasstem Strom Imess und erfasster Spannung Umess eingerichtet. Die Auswerteeinrichtung 1 101 ist zum Berechnen eines Leistungswertes mit dem korrigierten Wert l k0rr des erfassten Stroms und/oder mit dem korrigierten Wert U orr der erfassten Spannung eingerichtet und die Kalibriereinrichtung 1 102 ist zum Bereitstellen des berechneten Leistungswerts als aktuelle Wirkleistung Pk0ir eingerichtet. Pkorr ergibt sich aus f^. Wenn die Phase korrigiert ist, dann ist auch die Leistung korrigiert; Pk0rr= l rms*U,™*^korT
Die Spannung U(t) und der Strom l(t), insbesondere U 1 (t) und 11 (t) im Primärkreis 202, werden mit einer hohen Abtastrate von beispielsweise 1 MHz gesampelt. Die Frequenzen der Signale U(t) und l(t) liegen in einem zulässigen Bereich zwischen 81 .35kHz bis 90kHz, dem zugelassenen Frequenzband für ICS-Systeme. Die Phasenverschiebung f q wird gemäß Formel (K3) aus cos {f ) ermittelt. Diese Phasenverschiebung f


beinhaltet alle Phasenverschiebungen des Systems nämlich die Phasenverschiebung zwischen realer und gemessener Spannung fu,G™^, die Phasenverschiebung zwischen realem und gemessenem Strom fi,,t^ und die tatsächlich vorhanden
Phasenverschiebung zwischen Strom und Spannung fui- Bei diesen
Phasenverschiebungen handelt es sich um Verzögerungen verursacht durch die Hardware des ICS-Systems 100, insbesondere um Verzögerungen durch die digitalen und analogen Baugruppen (Analoge und Digitale Group Delays) des ICS-Systems 100. Die gemessene Leistung Pmess ist von diesen Group-Delays abhängig und wird durch die Group-Delays verfälscht. Diese Verfälschung soll durch die Kalibriereinrichtung 1 102 korrigiert werden. Mit den Group-Delays werden f und damit P auch korrigiert.
Die Primärmessvorrichtung 301 p berechnet den korrigierten Wert Ikorr des erfassten Stroms aus dem erfassten Wert des Stroms Imess unter der Berücksichtigung eines Verzögerungswertes TCAL, der von der erfassten Phasenverschiebung f,t^ abgeleitet worden ist.
f q33 ist die gemessene Phasenverschiebung zwischen gemessenem Strom Imess und gemessener Spannung Umess in dem Primärkreis 202.

A T Phaseshift wird iterativ zu Tcal hinzugefügt.d.h. Tca lk=A TphaseShjji+ Tcal k-l
Dieses Prinzip sorgt für eine Kalibrierung der Leistung bei geringen Leistungen. Bei großen Leistungen können die Abweichungen grösser sein. Jedoch ist die Regelung der kleinen Leistungen schwieriger in einem ICS System 100, wobei festgestellt werden muss, ob ein Arbeitspunkt gefunden ist und die Mindestleistung an der Ausgangsseite 220 geregelt werden muss.
In den Gleichungen (K7) und (K8) sind Randbedingungen gewählt, die die
Systemausführung des ICS-Systems 100 charakterisieren, Eine Kalibrierung, also die Bestimmung und Berücksichtigung eines Verzögerungswertes TCAL einer
Phasenverschiebung, kann bei jeder Frequenz des zulässigen Frequenzbereichs zwischen 81.35kHz bis 90kHz durchgeführt werden. In einem Beispiel wird zur
Bestimmung des Wertes der Kalibrierung mittels Regler 302 ein Arbeitspunkt des ICS- Systems 100 eingestellt, bei dem die Wirkleistung sehr viel kleiner als die Scheinleistung ist, in dem also gilt P«S, insbesondere P1 «S1 . In diesem spezifischen Arbeitspunkt beträgt der Cosinus-Wert der Phasenverschiebung Null cos (0)=- = O, so dass
angenommen werden kann, dass die erfassten Messwerte I mess , Umess auch den realen Messwerten entsprechen.
Es kann somit als eine Idee der Kalibrierung angesehen werden, alle Phasendrehungen oder Phasenverschiebungen, die innerhalb eines gemessenem cos
 vorhanden sind, dadurch zu kompensieren, dass eine Gruppenlaufzeit zu einem Messerwert von I oder zu einem Messwert von U hinzufügt wird, um die fehlerhafte Phasendrehung auszugleichen. Für diesen Ausgleich wird in einem digitalen Teil der Messvorrichtung 301 eine Sample- Hold-Einrichtung 1 103 vorgesehen.
Diese Kalibrierung kann für einen bereitgestellten Sollwert einer Leistungsregelung 302 vorgenommen werden. In anderen Worten ausgedrückt kann dem Regler 302 durch die Soll-Wert-Vorgabeeinrichtung 304 ein Sollwert Pson vorgegeben werden, indem bereits die Kalibrierung berücksichtigt ist. Alternativ kann aber auch der Messwert in der
vorhanden sind, dadurch zu kompensieren, dass eine Gruppenlaufzeit zu einem Messerwert von I oder zu einem Messwert von U hinzufügt wird, um die fehlerhafte Phasendrehung auszugleichen. Für diesen Ausgleich wird in einem digitalen Teil der Messvorrichtung 301 eine Sample- Hold-Einrichtung 1 103 vorgesehen.
Diese Kalibrierung kann für einen bereitgestellten Sollwert einer Leistungsregelung 302 vorgenommen werden. In anderen Worten ausgedrückt kann dem Regler 302 durch die Soll-Wert-Vorgabeeinrichtung 304 ein Sollwert Pson vorgegeben werden, indem bereits die Kalibrierung berücksichtigt ist. Alternativ kann aber auch der Messwert in der
Messvorrichtung mittels der Kalibrierung bereinigt werden, so dass die Soll-Wert- Vorgabeeinrichtung 304 mit realen Werten arbeiten kann und keine Phasenfehler berücksichtigen muss.
Die Sample-Hold-Einrichtung 1 103 der Primärmessvorrichtung 301 p kann zur
Berücksichtigung des Verzögerungswertes TCAL eingerichtet sein, um die fehlerhafte Phasendrehung in einem Messsignal auszugleichen.
Die Sample-Hold-Einrichtung 1 103 kann eine Laufzeit in der Hardware der
Primärmessvorrichtung 301 p berücksichtigen, also eine Laufzeit, die durch die Laufzeit eines Signals durch die Hardware der Primärmessvorrichtung 301 p entsteht. Die
Phasenverschiebungen entstehen aufgrund von der Messtechnik, insbesondere aufgrund der Laufzeit durch die Messmodule der Primärmessvorrichtung 301 p. Diese
Phasenverschiebungen werden in eine Gruppenlaufzeit umgerechnet und als
Kalibrierungswert in Form einer Gruppenlaufzeit bereitgestellt. Die Gesamtgruppenlaufzeit Tcal oder gesamte Phasenverschiebung foqI des gemessenen Signals zum realen Signal beinhaltet eine systematische Phasendrehung durch die Schaltungsauslegung, z.B.
Trafos und durch zusätzliche Systemkorrekturen.
Die Primärmessvorrichtung 301 p kann in einem Ground Pad Modul 105 integriert sein. Das GPM 105 arbeitet als autonomes System und kann die Kalibrierung ohne ein CPM 103 vorzunehmen. Es ist aber alternativ auch möglich, mit einem CPM 103 für die
Bestimmung eines Kalibrierungswertes zu kooperieren. Die Komponenten der
Messvorrichtung 301 , die für die Kalibrierung genutzt werden, sind auf dem GPM 105 vorhanden. Die Kalibrierung basiert nur auf primärseitigen Messungen von den
Messgrößen, die auf der Primärseite vorhanden sind, P1 , S1 , 11 , U1. Die Größen R0 und
Pout werden von der Kalibrierung nicht genutzt, dienen nur zur Veranschaulichung des Kalibrierungsverfahrens
Fig. 12 zeigt ein Flussdiagramm eines Verfahren zum Bestimmen eines
Kalibrierungsfaktors für eine Messung einer Wirkleistung in einem Primärkreis 202 eines Energieübertragungssystems 100 gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung. Dieses Verfahren wird im Wesentlichen bei jedem Ladevorgang bevor mit dem Laden begonnen zum Ermitteln des Kalibrierungsfaktors ausgeführt. Das Auffinden des Kalibrierungsfaktors erfolgt in der Kalibrierungsphase S602 eines
Ladevorgangs. Es kann auch ein Schalter vorgesehen sein, mit dem das Durchführen der Kalibrierungsphase S602 ab- und angeschaltet werden kann.
Das Verfahren zum Bestimmen eines Kalibrierungsfaktors für eine Messung einer Wirkleistung in einem Primärkreis 202 eines Energieübertragungssystems 100 startet in einem Idle-Zustand S1201. Es sieht im Zustand S1202 das Einstellen eines vorgebbaren Arbeitspunktes durch Einstellen einer vorgebbaren Eingangsspannung und einer vorgebbaren Arbeitsfrequenz vor. Das Verfahren weist ferner im Zustand S1203 das Erzeugen eines Leistungsverhältnisses mit einer geringen Wirkleistung und einer hohen Scheinleistung in diesem Arbeitspunkt auf. Bevor das Verfahren im Idle-Zustand S1205 endet, erfolgt im Zustand S1204 das Bestimmen des Kalibrierungsfaktors als
Phasenverschiebung f03i und/oder als Haltezeit Tcal. Dieser Kalibrierungsfaktor kann dann in der nachfolgenden Ladephase S603 des ICS-Systems berücksichtigt werden, um Messfehler auszugleichen.
Fig. 13 zeigt ein Flussdiagramm eines Verfahrens zum Kalibrieren eines Messwerts gemäß einem exemplarischen Ausführungsbeispiel der vorliegenden Erfindung. Dieses Verfahren kann genutzt werden einen Kalibrierungsfaktor während einer nachfolgenden Messphase, beispielsweise in der nachfolgenden Ladephase S603, zu nutzen, um Messfehler zu eliminieren. Wenn der Kalibrierungsfaktor eingestellt ist, kann er während sämtlicher nachfolgender Messungen berücksichtigt werden. Auf diese Art und Weise kann ein GPM 105 und/oder ein ICS-System 100 kalibriert werden.
Das Verfahren zum Kalibrieren eines Messwerts beginnt im Idle-Zustand S1301. Im nachfolgenden Zustand S1302 erfolgt das Erfassen eines Stroms Imess, einer Spannung Umess und einer gemessenen Phasenverschiebung (|)mess zwischen Strom Imess und
Spannung Umess in einem Primärkreis 202. Im Zustand S1303 erfolgt das Durchführen einer Leistungsmessung durch Auswerten des erfassten Stromes Less und der erfassten Spannung Umess. Im Zustand S1304 erfolgt das Korrigieren des erfassten Stroms Imess und/oder der erfassten Spannung Umess über den cos()-Wert der erfassten
Phasenverschiebung
 zwischen erfasstem Strom Imess und erfasster Spannung Umess und/oder über eine Haltezeit Tcai und das Berechnen eines Leistungswertes mit dem korrigierten Wert l k0rr des erfassten Stroms und/oder dem korrigierten Wert Ukom der erfassten Spannung. Im Zustand S1305 erfolgt das Bereitstellen des berechneten Leistungswerts als aktuelle Wirkleistung P orrbevordas Verfahren im Idle-Zustand S1306 endet.
zwischen erfasstem Strom Imess und erfasster Spannung Umess und/oder über eine Haltezeit Tcai und das Berechnen eines Leistungswertes mit dem korrigierten Wert l k0rr des erfassten Stroms und/oder dem korrigierten Wert Ukom der erfassten Spannung. Im Zustand S1305 erfolgt das Bereitstellen des berechneten Leistungswerts als aktuelle Wirkleistung P orrbevordas Verfahren im Idle-Zustand S1306 endet.
Die Kalibrierung der Leistung wird mithilfe der Erfassung des Kalibrierungsfaktors in der Form der Phasenlage bei einem Arbeitspunkt mit dem folgenden prinzipiellen Vorgehen ermittelt.
Mittels der Regeleinrichtung 302 wird eine vordefinierte Eingangsspannung und eine Arbeitsfrequenz eingestellt. Hierzu wird eine Vorsteuerung ohne Feedback-Loop 101 genutzt In anderen Worten wird bei einer Vorsteuerung ohne Feedback Loop eine Einstellung der Steuerkurven PWM x/y 1401 , 1402 über die Parameter der
Phasenverschiebung von x zu y und gemeinsamer PWM Frequenz, d.h. gleiche Frequenz für PWMx/y mit 50% PWM-X Dutycycle und 50% PWM-Y Dutycycle vorgenommen, wie in Fig. 14 durch die Signale 1401 1402 dargestellt. Die Frequenz und die Phase werden gestellt, gesteuert oder variiert, bis eine Mindestleistung am Eingang 206 des Filters für die Regelung gemessen werden kann. Somit ergibt sich der Verlauf der
Eingangsspannung Uein 1403 oder Uin.
Das mag bedeuten, dass hierfür das GPM 105 autark arbeiten kann, ohne dass ein CPM 104 benötigt wird. Es ist somit ausreichend zum Einstellen der vordefinierten
Eingangsspannung und einer Arbeitsfrequenz das GPM 105 mittels Regeleinrichtung 302 lokal zu definieren, ohne einen Einfluss des CPM 104 berücksichtigen zu müssen.
Die Wirkleistung des Primärkreises 202 wird dann mittels Regeleinrichtung 302 so eingestellt, dass die Wirkleistung gering oder im Bereich von 0 W liegt mit einer wesentlich größeren Scheinleistung gegenüber der Blindleistung, so dass gilt P«S. Dieser große Unterschied zwischen Scheinleistung und Blindleistung kann unter
Einbeziehung des CPM 104 aber auch autark von dem GPM 105 alleine durch eine Systemkonfiguration des GPM 105 eingestellt werden.
Das Einstellen der Eigenschaft, dass im Primärkreis 202 der GPM 105 gilt, dass P«S lässt sich mithilfe des CPM erreichen, indem das CPM 104 einen Zustand einstellt, in dem die Last 205, d.h. R0 oder RLast minimiert wird, so dass gilt RLast— > 0W.
Zum Minimieren der Last an dem CPM 104 kann das CPM 104 die Last 205 auf der Sekundärseite kurzschließen, so dass Ro = 0 gilt, insbesondere dass die Impedanz Zo eine reelle Last ist und diese gegen Null geht. Ein Kurzschluss der Last 205 kann mittels der in der CPM 104 vorhandenen Crowbar 401 herbeigeführt werden, welche den Schalter S1 aufweist. Wird die Crowbar 401 gesperrt, d.h. S1 wird geschlossen, ist die Last am Ausgang des CPM 104 im Wesentlichen kurzgeschlossen und liegt nahe Null. Wenn keine Wirkleistung P2 auf der Sekundärseite 203 fließen kann, dann ist die
Leistung im Primärkreis 202 P1 = 0 bei einer beliebigen Scheinleistung S1. Außerdem sind Strom I und Spannung U im Primärkreis um 90° phasenverschoben. Diese Methode der Reduktion der Wirkleistung gegenüber der Scheinleistung so dass P«S gilt unter Einbeziehung des CPM 104 ist unabhängig von den Eigenschaften vom Schwingkreis 211 und dessen Parameter k, L1 , L2 sowie von den Spannungen Uein oder Uin am Eingang des Filters 200 und U1 bzw. UBatt des Systems 100.
Das Einstellen der Eigenschaft, dass im Primärkreis 202 des GPM 105 gilt: P«S, lässt sich alternativ auch im Wesentlichen ohne Einstellungen an dem CPM 104 vornehmen zu müssen erreichen, indem in dem GPM 105 eine spezifische Systemkonfiguration vorgenommen wird. Hierfür stellt die Regeleinrichtung 302 eine Phasenverschiebung zwischen den Signals PWMx 1401 und PWMy 1402 des PWM Generators 201 ein, woraus sich ein Tastverhältnis des resultierenden PWM Signals 1403ergibt, so ein, dass
sich eine Eingangsspannung Uein oder Uin einstellt, aber sich noch keine Wirkleistung aufbauen kann Die Eingangsspannung wird somit nur durch die Phasenverschiebung gestellt und durch Tastverhältnis Q von resultierende PWM Signal. Die
Frequenzverstellung sorgt für eine hohe Scheinleistung zu Wirkleistung. Das System wird mit einer Frequenz eingestellt, die weitem über der Resonanzfrequenz liegt. Durch diese Verschiebung ergibt sich eine hohe Scheinleistung zu Wirkleistung.
Das System, insbesondere das GPM 105, braucht bei sehr geringen Leistungen einen sehr hohen Anteil an Blindleistung und man kann P -> 0 bzw. P«S annehmen. Das ist systembedingt durch die Ansteuerung dieses Wandlers in der ICS Topologie, gemäß Fig. 4. Eine geringe Leistung wird bei einer hohen Frequenz gestellt.
Durch die Eingangsspannung Uein oder Uin und die Frequenz wird ein Arbeitspunkt bestimmt. Dieser Arbeitspunkt ist systemspezifisch oder konfigurationsspezifisch zu wählen. Dazu kann man u.U. den CPM-Strom (Batteriestrom) als Feedbackquelle nutzen.
Da bei einem ICS-System der Ladevorgang erst nach Koppelung von CPM und GPM gestartet wird, ist eine weitere Möglichkeit um P«S zu erfüllen nicht implementiert. Diese Methode sieht die Manipulation des Schwingkreises vor, wobei der Schwingkreis so manipuliert wird, dass der Koppelfaktor k sehr klein wird und dass gilt k -> 0. Um diese Manipulation vorzunehmen müsste die Lage von CPM und GPM nicht vom Fahrzeug definiert werden und müsste beim Laden beeinflussbar sein
Es wäre eine denkbare Anwendung für andere Systeme. Beispielsweise könnte durch ein bewegtes System das CPM von de GPM weit weg verschoben werden und in dem GPM ein Strom gestellt werden. Die Kopplung nimmt mit dem Abstand in der Höhe (z-Abstand) von Spule zu Spule ab. Dies könnte für Systeme genutzt werden, die das Auto
kontrollieren können und erst ein Feld aufbauen dürfen, wenn ein Auto sich über der Ladekomponente befindet und für die funktionale Sicherheit kein Feldaufbau ohne CPM Anforderung zugelassen ist.
Es ergibt sich bei dem einstellen eines Arbeitspunktes mit einer konkreten Stellspannung Uin und einer Ansteuerfrequenz fSw folgender Zusammenhang für den Kalibrierungswert der Phasenlage feaΐ:
Wie weiter oben ausgeführt kann die Phasenverschiebung mithilfe einer
Nulldurchgangserkennung von Strom und Spannung analog als Zeitwert ermittelt werden oder als cos (f) = bei einer kontinuierlichen Wirk- und Scheinleistungsmessung gemäß

Formel (K3). Die Phasenverschiebung feaί kann bei einer Nulldurchgangserkennungs- messung additiv hinzugefügt werden. Bei einer Erfassung von der Wirkleistung mithilfe einer kontinuierlichen Messung kann eine Gruppenlaufzeit dynamisch mit einer Haltezeit Tcal gesteuert werden. Eine dynamische Gruppenlaufzeit ist durch die Haltezeit bestimmt. Die Haltezeit Tcal ist an einer bestimmten Arbeitsfrequenz gerechnet worden zB. Bei der Startfrequenz fstart = 90kHz. Da die Phase korrigiert werden soll, muss die Zeit mit der aktuellen Ansteuerfrequenz korrigiert werden. Die untere Rechnung zeigt die Berechnung der Korrektur. Ein System muss diese Korrekturmaßnahme jedoch nicht unbedingt haben, da mit einem konstanten Wert von Tcal (f = 90kHz) gerechnet werden kann. Wenn die Korrektur vorgesehen ist, kann die Messung genauer gemacht werden.
In anderen Worten kann je nach eingesetztem Verfahren zur
Phasenverschiebungsmessung Der Kalibrierungsfaktor Tcal oder feaί bestimmt werden:

(K10), (K1 1 )
In den Formeln (K10), (K11 ) sind die Werte, auf die Phasenverschiebung bezogen ist 0. So ist in (K10) die Spannung der Bezug für die Phasendifferenz des Stroms und in (K1 1 ) der Strom der Bezug für die Phasendifferenz der Spannung.
Zur Bestimmung der einzelnen Messwerte in dem ICS-System 100 und insbesondere in dem GPM 105, werden die GPM Signale oder Trafosignale U1 und 11 mittels der
Messvorrichtung 301 abgetastet. In einem Beispiel nutzt die Messvorrichtung 301 eine Abtastrate oder Samplingrate von 1 MHz, um die Trafo Signale abzutasten. Diese
Abtastrate ist für Signale mit 80kHz - 90kHz ausreichend.
Die Messvorrichtung 301 erfasst durch eine Momentanwerterfassung die Trafo-Signale U1 und 11 des Primärkreises 202 und berechnet daraus die Wirkleistung P1. Die
Wirkleistung berechnet sich bei der Momentanwerterfassung durch

Hierin wird der zuvor ermittelte Kalibrierungsfaktor Tcal berücksichtigt, um Messfehler bei der Berechnung der Leistung zu eliminieren. Für die Kalibrierung wird Sample und Hold oder einfache Addition genutzt. Die Addition von Tcal ist mathematisch in (K12) abgebildet. Die Scheinleistung ist zeitunabhängig oder winkelunabhängig. Die
Phasenverschiebung ist nicht relevant, wie aus (K13) hervorgeht.
Die Scheinleistung ergibt sich durch:

Leistungsmessung das Einstellen eines großen Unterschieds zwischen Wirk- und
Scheinleistung vorgesehen P«S. Dieser große Unterschied zwischen Scheinleistung und Blindleistung kann unter Einbeziehung des CPM 104 aber auch autark von dem GPM 105 alleine durch eine Systemkonfiguration des GPM 105 eingestellt werden.
Bei der Variante, bei der das CPM 104 eines Fahrzeugs einbezogen wird, wird ein Kurzschluss auf dem CPM generiert. Für das Einstellen des Kurzschlusses kommuniziert das CPM 104 mit dem GPM 105 über den Kanal 101. Dabei signalisiert das CPM dem GPM, dass das CPM geladen werden möchte. In einem anderen Beispiel könnte auch die GPM 105 den Ladevorgang starten.
Dieses Signalisieren kann den Ladevorgang durch Leistungsübertragung vom GPM zum CPM auslösen. Um das Laden zu beginnen kann das CPM dem GPM einen Ladebefehl übertragen. Das CPM 104 hält die Crowbar nach Absetzen des Ladebefehls im Zustand „Crowbar geschlossen“, in dem der Schalter S1 geschlossen ist um die Batterie 205 und/oder den Zwischenkreis 205 vom Fahrzeug vom Sekundärschwingkreis 203 mittels eines Kurzschlusses zu trennen. Dieser Zustand wird auch über die
Kommunikationsschnittstelle 101 dem GPM 105 zugestellt. Da das GPM noch nicht lädt, meldet es noch einen Zustand„Kalibration-Anhängig“, während dem die Kalibrierung des GPM 105 durchgeführt wird.
Das GPM verwendet eine Vorsteuerungseinrichtung auf dem Regler 302, um einen Arbeitspunkt bei einer definierten Eingangsspannung Uin, mit einer definierten
Arbeitsfrequenz fsw,cal und in diesem Arbeitspunkt eine Scheinleistung S aufzubauen. Hierbei bedeutet cal im Index, die Ansteuerfrequenz, bei der die Kalibrierung durchgeführt wird, zB. 90kHz.
Das CPM 104 wird mittels einer entsprechenden Signalisierung von dem GPM 105 über Kanal 101 informiert, dass die Kalibrierung der Wirkleistung abgeschlossen ist, d.h. dass die Ermittlung des Kalibrierungsfaktors und Einstellung der Korrekturmaßnahmen in Messeinrichtung 301 erfolgt sind. Nach Erhalt dieser Fertigmeldung öffnet das CPM 104
die Crowbar 401 und wechselt in den Zustand„Crowbar open“ und signalisiert an das GPM zurück, dass die Crowbar 401 geöffnet ist.
Mit den ermittelten Delay-Zeiten oder Kalibrierungsfaktoren können dann in Abhängigkeit von der Ansteuerfrequenz fsw oder Arbeitsfrequenz fsw des GPMs angepasst werden
Das GPM 105 schließt damit die Kalibrierungsphase S602 ab und geht in den Ladebetrieb S603 über. Während des Ladebetriebs S603 stellt das GPM 105 die Wirkleistung P1 des ICS-Systems 100 anhand von der Messung mit den ermittelten zusätzlichen Delays Tcal(i) und Tcal(u) ein.
Bei der Variante, bei der eine Systemkonfiguration oder eine Systemanalyse
vorgenommen wird, um eine Kalibrierung durchzuführen, wird die Steuerung der Crowbar in den Kurzschluss nicht durchgeführt oder weggelassen. Die Crowbar bleibt somit während dieses Kalibrierungsvorgangs außer Betrieb. Da jedoch die Crowbar nicht aktiviert wird, muss der Zustand P«S auf eine andere Weise hergestellt werden.
Die relevanten Übertragungsfunktionen werden für alle Betriebszustände des Geräts ermittelt. Es wird nach der maximalen Ansteuerungsspannung Uein, max gesucht, bei der bei einem überresonanten Betrieb ( fsw = fsw,) weniger als 50W von dem GPM 105 zu dem CPM 104 übertragen werden können unter Berücksichtigung aller Kopplungswerte k, aller Induktivitätswerte und Ausgangsspannungswerte UBatt, welche durch Z0 definiert werden. Folglich wird die Bedingung P«S angenähert. Somit wird indirekt der Realanteil von der Ersatzimpedanz Z0 auch so klein, dass dieses Verhalten einem Kurzschluss der Crowbar gleichgesetzt werden kann und ein ähnliches Verfahren wie bei der Variante, bei der die CPM und insbesondere die Crowbar mitverwendet wird, um die Kalibrierung
durchzuführen, ausgeführt werden kann. Die Induktivitätswerte L1 , L2 können
beispielsweise in einer Parkposition variieren. Diese Vorgaben können bei der
Dimensionierung und Auslegung des ICS-Systems berücksichtigt werden. Die
Phasenverschiebung und Ansteuerfrequenz der Kalibrierung wird so gewählt, so dass bei allen Parkpositionen und Batteriespannungen, diese Parameterkombinationen zu einem sehr kleinen P1/S1 Verhältnis führt.
Ergänzend ist darauf hinzuweisen, dass„umfassend“ und„aufweisend“ keine anderen Elemente oder Schritte ausschließt und„eine“ oder„ein“ keine Vielzahl ausschließt.
Ferner sei darauf hingewiesen, dass Merkmale oder Schritte, die mit Verweis auf eines der obigen Ausführungsbeispiele beschrieben worden sind, auch in Kombination mit anderen Merkmalen oder Schritten anderer oben beschriebener Ausführungsbeispiele verwendet werden können. Bezugszeichen in den Ansprüchen sind nicht als
Einschränkung anzusehen.
Claims
1. Primärmessvorrichtung (301 p) zum Messen einer aktuellen Wirkleistung (P, P1 ) in einem Primärkreis (202) eines Energieübertragungssystems (100), aufweisend:
- eine Auswerteeinrichtung (1101 );
- eine Kalibriereinrichtung (1102);
wobei die Auswerteeinrichtung (1101 ) einen Messanschluss zum Erfassen eines Stroms (I mess), einer Spannung (Umess) und einer gemessenen Phasenverschiebung (i|)mess) zwischen Strom (l mess) und Spannung (Umess) in dem Primärkreis (202) aufweist;
wobei die Auswerteeinrichtung (1101 ) und die Kalibriereinrichtung (1102) miteinander verbunden sind;
wobei die Auswerteeinrichtung (1101 ) weiter zum Durchführen einer
Leistungsmessung durch Auswerten des erfassten Stromes (I 1 mess) und der erfassten Spannung (U mess) eingerichtet ist;
wobei die Kalibriereinrichtung (1 1 02) zum Korrigieren des erfassten Stroms (I mess) und/oder der erfassten Spannung (Umess) über den cos()-Wert der erfassten
Phasenverschiebung (f Q55) zwischen erfasstem Strom (I 1 mess) und erfasster Spannung (Umess) und/oder über eine Haltezeit (Tcal) eingerichtet ist;
wobei die Auswerteeinrichtung (1101 ) zum Berechnen eines Leistungswertes mit dem korrigierten Wert (l k0rr) des erfassten Stroms und/oder dem korrigierten Wert (Ukom) der erfassten Spannung eingerichtet ist; und
wobei die Kalibriereinrichtung (1102) zum Bereitstellen des berechneten
Leistungswerts als aktuelle Wirkleistung (Pk0ir) eingerichtet ist .
2. Primärmessvorrichtung (301 p) nach Anspruch 1 , wobei sich der korrigierte Wert des erfassten Stroms (Lorr) aus dem erfassten Wert des Stroms (Imess) unter der
Berücksichtigung eines Verzögerungswertes (TCAL) ergibt, der von der erfassten Phasenverschiebung (f,^) abgeleitet worden ist.
3. Primärmessvorrichtung (301 p) nach Anspruch 1 oder 2, wobei die Kalibrierung für einen bereitgestellten Sollwert einer Leistungsregelung vorgenommen wird.
4. Primärmessvorrichtung (301 p) nach einem der Ansprüche 2 bis 3, weiter aufweisend:
eine Sample-Hold-Einrichtung (1 103);
wobei die Sample-Hold-Einrichtung zur Berücksichtigung des Verzögerungswertes (TCAL) eingerichtet ist.
5. Primärmessvorrichtung (301 p) nach Anspruch 4, wobei die Sample-Hold- Einrichtung (1103) eine Laufzeit in der Hardware der Primärmessvorrichtung berücksichtigt.
6. Ground Pad Modul (105) mit einer Primärmessvorrichtung (301 p) nach einem der Ansprüche 1 bis 5.
7. Verfahren zum Bestimmen eines Kalibrierungsfaktors für eine Messung einer Wirkleistung in einem Primärkreis (202) eines Energieübertragungssystems (100), aufweisend:
Einstellen eines vorgebbaren Arbeitspunktes durch Einstellen einer vorgebbaren Eingangsspannung und einer vorgebbaren Arbeitsfrequenz;
Erzeugen in diesem Arbeitspunkt eines Leistungsverhältnisses mit einer geringen Wirkleistung und einer hohen Scheinleistung;
Bestimmen des Kalibrierungsfaktors als Phasenverschiebung (f03i) und/oder als Haltezeit (Tcal) zur bekannten Referenz (f^)
8. Verfahren zum Kalibrieren eines Messwerts, aufweisend:
Erfassen eines Stroms (Less), einer Spannung (Umess) und einer gemessenen Phasenverschiebung {§mess) zwischen Strom (Less) und Spannung (Umess) in einem Primärkreis (202);
Durchführen einer Leistungsmessung durch Auswerten des erfassten Stromes (Less) und der erfassten Spannung (Umess);
Korrigieren des erfassten Stroms (Less) und/oder der erfassten Spannung (Umess) über den cos()-Wert der erfassten Phasenverschiebung (^mess) zwischen erfasstem Strom (Less) und erfasster Spannung (Umess) und/oder über eine Haltezeit (Tcal); Berechnen eines Leistungswertes mit dem korrigierten Wert (Ikon) des erfassten Stroms und/oder dem korrigierten Wert (Ukom) der erfassten Spannung;
Bereitstellen des berechneten Leistungswerts als aktuelle Wirkleistung (Pkon).
9. Computerlesbares Speichermedium, in dem ein Programm gespeichert ist, das, wenn es von einem Prozessor ausgeführt wird, das Verfahren nach Anspruch 7 oder 8 auszuführen.
10. Programm-Element, das, wenn es von einem Prozessor ausgeführt wird, das Verfahren nach Anspruch 7 oder 8 ausführt.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/253,014 US11630136B2 (en) | 2018-06-29 | 2019-06-24 | Primary measuring device for measuring a current effective power |
| CN201980043049.6A CN112912739B (zh) | 2018-06-29 | 2019-06-24 | 用于测量当前作用功率的初级测量装置 |
| DE112019003307.7T DE112019003307A5 (de) | 2018-06-29 | 2019-06-24 | Primärmessvorrichtung zum Messen einer aktuellen Wirkleistung |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018115887 | 2018-06-29 | ||
| DE102018115887.4 | 2018-06-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020002223A1 true WO2020002223A1 (de) | 2020-01-02 |
Family
ID=67106026
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/EP2019/066655 Ceased WO2020002223A1 (de) | 2018-06-29 | 2019-06-24 | Primärmessvorrichtung zum messen einer aktuellen wirkleistung |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11630136B2 (de) |
| CN (1) | CN112912739B (de) |
| DE (1) | DE112019003307A5 (de) |
| WO (1) | WO2020002223A1 (de) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117461239A (zh) * | 2021-06-08 | 2024-01-26 | B和R工业自动化有限公司 | 用于感应式能量传输的方法 |
| CN113740591B (zh) * | 2021-09-10 | 2023-10-13 | 温州大学 | 一种周期信号有效值最优估计方法 |
| CN113740594B (zh) * | 2021-09-10 | 2023-10-17 | 温州大学 | 一种交流电压有效值高精度测量电路 |
| CN113740592B (zh) * | 2021-09-13 | 2023-10-13 | 温州大学 | 一种周期信号有效值最优测量电路 |
| CN117639188A (zh) * | 2022-08-19 | 2024-03-01 | 荣耀终端有限公司 | 一种无线充电控制方法及电子设备 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03108674A (ja) * | 1989-09-22 | 1991-05-08 | Hitachi Ltd | デジタル電力計測器 |
| RU519U1 (ru) * | 1993-09-27 | 1995-06-16 | Леонид Федорович Дружинин | Счетчик электроэнергии |
| EP0899864A1 (de) * | 1997-03-11 | 1999-03-03 | Mitsubishi Denki Kabushiki Kaisha | Regler für induktionsmotor |
| WO2003060540A1 (fr) * | 2002-01-09 | 2003-07-24 | Mitsubishi Denki Kabushiki Kaisha | Watt-heuremetre, procede d'ajustement d'erreurs pour un tel watt-heuremetre et circuit de calcul de puissance |
| WO2009007237A1 (en) * | 2007-07-06 | 2009-01-15 | Siemens Aktiengesellschaft | Method and apparatus for correcting the phase error in measurement-control equipment for a power network |
| EP2437573A1 (de) * | 2009-05-26 | 2012-04-04 | Mitsubishi Electric Corporation | Induktionskochgerät und induktionserhitzungsverfahren |
| US20150061636A1 (en) * | 2013-09-04 | 2015-03-05 | Texas Instruments Incorporated | Automatic calibration method for active and reactive power measurement |
| EP2868516A1 (de) | 2013-10-31 | 2015-05-06 | Brusa Elektronik AG | Verfahren zur Regelung der zwischen zwei Resonatoren eines Systems zur kontaktlosen Energieübertragung übertragenen Energie, sowie Resonatoranordnung |
| JP2016086472A (ja) * | 2014-10-23 | 2016-05-19 | 株式会社ダイヘン | 直流電力供給装置および直流電力供給方法 |
| EP3103674A1 (de) | 2015-06-12 | 2016-12-14 | Brusa Elektronik AG | Positionsbestimmungssystem, verfahren zur positionsbestimmung und system zur induktiven energieübertragung mit positionsbestimmungssystem |
| WO2017025131A1 (de) * | 2015-08-11 | 2017-02-16 | Siemens Aktiengesellschaft | Verfahren zur regelung eines selbstgeführten umrichters, selbstgeführter umrichter sowie anordnung zur übertragung elektrischer leistung |
| DE102015011285A1 (de) * | 2015-08-27 | 2017-03-02 | Daimler Ag | Bodenstation zum Laden eines Kraftfahrzeugs |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3429150A1 (de) | 1984-08-08 | 1986-02-20 | Brown, Boveri & Cie Ag, 6800 Mannheim | Verfahren zur feststellung des erdungszustandes von freigeschalteten elektrischen leitungen |
| EP2397864A1 (de) | 2010-06-18 | 2011-12-21 | Nxp B.V. | Stromzähler und Verfahren zur Bestimmung einer Menge |
| KR101234879B1 (ko) | 2011-09-27 | 2013-02-19 | 한국전력공사 | 전력산출 장치 및 방법 |
| EP3039770B1 (de) * | 2013-08-14 | 2020-01-22 | WiTricity Corporation | Impedanzabstimmung |
| US9784777B2 (en) * | 2014-09-24 | 2017-10-10 | Qualcomm Incorporated | Methods and systems for measuring power in wireless power systems |
| US9995815B2 (en) * | 2014-12-30 | 2018-06-12 | Energybox Ltd. | Energy metering system and method for its calibration |
| US11207989B2 (en) * | 2016-03-22 | 2021-12-28 | University Of Georgia Research Foundation, Inc. | Wireless charging of electric vehicles |
| US10132846B2 (en) * | 2016-06-14 | 2018-11-20 | Analog Devices Global | Method of and apparatus for learning the phase error or timing delays within a current transducer and power measurement apparatus including current transducer error correction |
| DE102016224295A1 (de) | 2016-12-06 | 2018-06-07 | Audi Ag | Verfahren zum Betrieb einer Ladeeinrichtung, Ladeeinrichtung und Kraftfahrzeug |
| US9919610B1 (en) * | 2017-01-12 | 2018-03-20 | The Florida International University Board Of Trustees | Wireless power electronics and controls |
-
2019
- 2019-06-24 CN CN201980043049.6A patent/CN112912739B/zh active Active
- 2019-06-24 US US17/253,014 patent/US11630136B2/en active Active
- 2019-06-24 DE DE112019003307.7T patent/DE112019003307A5/de active Pending
- 2019-06-24 WO PCT/EP2019/066655 patent/WO2020002223A1/de not_active Ceased
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03108674A (ja) * | 1989-09-22 | 1991-05-08 | Hitachi Ltd | デジタル電力計測器 |
| RU519U1 (ru) * | 1993-09-27 | 1995-06-16 | Леонид Федорович Дружинин | Счетчик электроэнергии |
| EP0899864A1 (de) * | 1997-03-11 | 1999-03-03 | Mitsubishi Denki Kabushiki Kaisha | Regler für induktionsmotor |
| WO2003060540A1 (fr) * | 2002-01-09 | 2003-07-24 | Mitsubishi Denki Kabushiki Kaisha | Watt-heuremetre, procede d'ajustement d'erreurs pour un tel watt-heuremetre et circuit de calcul de puissance |
| WO2009007237A1 (en) * | 2007-07-06 | 2009-01-15 | Siemens Aktiengesellschaft | Method and apparatus for correcting the phase error in measurement-control equipment for a power network |
| EP2437573A1 (de) * | 2009-05-26 | 2012-04-04 | Mitsubishi Electric Corporation | Induktionskochgerät und induktionserhitzungsverfahren |
| US20150061636A1 (en) * | 2013-09-04 | 2015-03-05 | Texas Instruments Incorporated | Automatic calibration method for active and reactive power measurement |
| EP2868516A1 (de) | 2013-10-31 | 2015-05-06 | Brusa Elektronik AG | Verfahren zur Regelung der zwischen zwei Resonatoren eines Systems zur kontaktlosen Energieübertragung übertragenen Energie, sowie Resonatoranordnung |
| JP2016086472A (ja) * | 2014-10-23 | 2016-05-19 | 株式会社ダイヘン | 直流電力供給装置および直流電力供給方法 |
| EP3103674A1 (de) | 2015-06-12 | 2016-12-14 | Brusa Elektronik AG | Positionsbestimmungssystem, verfahren zur positionsbestimmung und system zur induktiven energieübertragung mit positionsbestimmungssystem |
| WO2017025131A1 (de) * | 2015-08-11 | 2017-02-16 | Siemens Aktiengesellschaft | Verfahren zur regelung eines selbstgeführten umrichters, selbstgeführter umrichter sowie anordnung zur übertragung elektrischer leistung |
| DE102015011285A1 (de) * | 2015-08-27 | 2017-03-02 | Daimler Ag | Bodenstation zum Laden eines Kraftfahrzeugs |
Non-Patent Citations (2)
| Title |
|---|
| "IEEE Master Test Guide for Electrical Measurements in Power Circuits;ANSI/IEEE Std 120-1989", IEEE STANDARD, IEEE, PISCATAWAY, NJ, USA, 1 January 1989 (1989-01-01), pages _1, XP017602505, ISBN: 978-0-7381-1023-3 * |
| ZUPUNSKI I ET AL: "Power factor calibrator", PRECISION ELECTROMAGNETIC MEASUREMENTS DIGEST, 1996 CONFERENCE ON, IEEE, 17 June 1996 (1996-06-17), pages 554 - 555, XP032373649, ISBN: 978-0-7803-3376-5, DOI: 10.1109/CPEM.1996.547345 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112912739B (zh) | 2024-06-11 |
| US11630136B2 (en) | 2023-04-18 |
| CN112912739A (zh) | 2021-06-04 |
| US20210116484A1 (en) | 2021-04-22 |
| DE112019003307A5 (de) | 2021-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020002223A1 (de) | Primärmessvorrichtung zum messen einer aktuellen wirkleistung | |
| EP1257048B1 (de) | Regelvorrichtung für einen resonanten Konverter | |
| DE102012200841B4 (de) | Elektrisches system und verfahren | |
| DE102006022845B4 (de) | Ansteuerschaltung für eine Schaltereinheit einer getakteten Leistungsversorgungsschaltung und Resonanzkonverter | |
| WO2020002219A1 (de) | Basisstation für ein energieübertragungssystem | |
| DE102012007477B4 (de) | Verfahren zum Betreiben eines LLC-Resonanzwandlers für ein Leuchtmittel, Wandler und LED-Konverter | |
| EP3481664B1 (de) | Fahrzeugbordnetz, ladesystem, ladestation und verfahren zur übertragung von elektrischer energie | |
| EP2393181B1 (de) | Schaltung für ein System zur kontaklosen, induktiven Energieübertragung | |
| DE112019001196B4 (de) | Kontaktlose energieübertragungsvorrichtung | |
| DE112019004409T5 (de) | Energie-umwandlungseinrichtung | |
| DE102016114101A1 (de) | Transformatorloses stromisoliertes bordladegerät mit festkörper-schaltersteuerung | |
| DE102010031615A1 (de) | Ladevorrichtung mit galvanischer Trennung und vielfältigen Betriebsarten | |
| DE69615610T2 (de) | Schaltung und Verfahren zur Steuerung der Ausgangseigenschaften eines Schaltnetzteiles | |
| DE102021130757A1 (de) | System und Verfahren für eine reaktive Steuerung für eine Leistungsfaktorkorrektur (PFC) an einem einstufigen Onboard-Ladegerät | |
| DE102011083203A1 (de) | Systems and Methods for Providing Power to a Load based upon a control Strategy | |
| DE102017103226A1 (de) | Ss-l-kompensationsschaltung zur drahtlosen leistungsübertragung | |
| DE102012111853B4 (de) | Schaltnetzteilvorrichtung und Verwendung einer solchen | |
| WO2020002240A1 (de) | Primärkreisvorrichtung, sekundärkreisvorrichtung und system zum induktiven laden | |
| DE102013207883A1 (de) | Schaltungsanordnung mit einem Resonanzwandler und Verfahren zum Betreiben eines Resonanzwandlers | |
| DE102012208543A1 (de) | Wandler mit variabler Frequenzsteuerung | |
| DE102020209079A1 (de) | Fahrzeugeigenes Ladegerät (OBC) mit Netzfrequenzunterdrückungseinrichtung | |
| WO2020002227A1 (de) | Induktive ladung von fahrzeugen mit sekundärseitiger spannungsmessung und rückwirkung der sekundärseite auf die primärseite | |
| DE102024138776A1 (de) | Integrierung einer dc-schnellladungsverstärkungsschaltung in ein batteriestromsteuermodul | |
| DE102022203649A1 (de) | Vorrichtung und verfahren zum steuern eines llc-resonanzwandlers | |
| DE112004000598T5 (de) | Entkopplungsschaltungen |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19734034 Country of ref document: EP Kind code of ref document: A1 |
|
| REG | Reference to national code |
Ref country code: DE Ref legal event code: R225 Ref document number: 112019003307 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19734034 Country of ref document: EP Kind code of ref document: A1 |