WO2020006709A1 - Système de positionnement visuel, véhicule aérien sans pilote et procédé d'auto-détection de position de véhicule aérien sans pilote - Google Patents
Système de positionnement visuel, véhicule aérien sans pilote et procédé d'auto-détection de position de véhicule aérien sans pilote Download PDFInfo
- Publication number
- WO2020006709A1 WO2020006709A1 PCT/CN2018/094501 CN2018094501W WO2020006709A1 WO 2020006709 A1 WO2020006709 A1 WO 2020006709A1 CN 2018094501 W CN2018094501 W CN 2018094501W WO 2020006709 A1 WO2020006709 A1 WO 2020006709A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- module
- data
- series
- images
- drone
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
Definitions
- the invention relates to a visual positioning system, a drone, and a method for self-detecting the position of the drone.
- Unmanned aerial vehicle is a remotely controlled flight or autonomous aircraft carrying a camera, sensor, communication device or other payload.
- UAV Unmanned aerial vehicle
- GPS global positioning system
- the technical problem to be solved by the present disclosure is to provide a drone with a positioning system other than GPS to overcome the disadvantage that GPS positioning information may be inaccurate in many different situations.
- the present disclosure solves the above technical problems through the following technical solutions.
- a vision positioning system for a drone includes a lens module, a matching module, a sensor module, and a translation module.
- the lens module captures a series of fish-eye view images over time during the flight.
- the matching module derives the first data by comparing and contrasting at least one feature from the fisheye view image.
- the sensor module collects the second data, and the sensor module is electrically coupled to the lens module.
- the translation module is electrically coupled to the sensor module to generate positioning data by processing the first data in consideration of the second data.
- the sensor module includes one or more of a LiDAR sensor, an inertial measurement unit (IMU), a GPS receiver, and a radar.
- IMU inertial measurement unit
- the lens module includes a fisheye lens having a field of view of at least 180 degrees.
- the second data includes one or more of altitude data, GPS maps, GPS coordinates, positions relative to at least one surrounding physical object.
- the sensor module includes one or more of a LiDAR and a GPS receiver.
- an unmanned aerial vehicle (UAV)
- the drone includes a body, a fisheye lens module, a matching module, and a translation module.
- the body has a lower side.
- the fisheye lens module is disposed on the lower side of the drone.
- the fisheye lens module has a wide field of view and takes a series of images of the area under the drone over time during the flight.
- the matching module compares and contrasts the features of each of the series of images to derive the first data.
- the translation module translates the first data into positioning data.
- the drone further includes a verification module that compares the positioning data with a GPS map.
- the drone further includes a gimbal that connects the fisheye lens module to the body, the gimbal having at most 2 axes .
- the series of images taken over time are taken at a speed of at least 60 images per second.
- the drone further includes a sensor module, the sensor module is configured to collect second data, and the translation module is configured to consider the second data to derive the positioning data.
- the sensor module includes one or more of a LiDAR sensor, an inertial measurement unit (IMU), a GPS receiver, and a radar.
- a method for self-detecting the position of the drone when flying in an area with insufficient GPS signals includes: obtaining initial positioning data including altitude data; capturing a series of fish-eye view images during flight at a speed of more than 60 images per second; comparing relative changes between the series of fish-eye view images; The initial positioning data and the relative change calculate the position of the drone.
- the method further includes using data from the IMU.
- the method further includes comparing the relative change to a GPS map.
- a visual positioning system may be used in a drone to allow the drone to have additional / alternative positioning information.
- the UAV of the present invention uses the visual positioning system as a supplementary method on the existing positioning system, and can obtain more accurate positioning information.
- FIG. 1 is a side view of a UAV according to some embodiments of the present disclosure.
- FIG. 2 is a block diagram of a UAV according to some embodiments of the present disclosure.
- FIG. 3 is a side view of a lens module according to some embodiments of the present disclosure.
- FIG. 4 illustrates a two-dimensional view of diffusion of various points shown in a lens module according to some embodiments of the present disclosure.
- FIG. 5 illustrates four images taken by a lens module, which represent four views of the ground over time, according to some embodiments of the present disclosure.
- FIG. 6 is a perspective view of a lens module on a 2-axis universal joint according to some embodiments of the present disclosure.
- FIG. 7 is a block diagram of a UAV according to some embodiments of the present disclosure.
- FIG. 8 is a block diagram of a UAV according to some embodiments of the present disclosure.
- FIG. 9 is a method of self-detecting a position of a drone itself according to some embodiments of the present disclosure.
- the invention discloses a new way to improve the integrity and effectiveness of position detection of a drone by using a positioning system.
- the positioning system may be a visual positioning system.
- the visual positioning system may generate a visual position, such as a relative position with respect to a reference point or point block of the drone.
- the visual location may differ from the location defined by the Global Positioning System (GPS).
- GPS Global Positioning System
- a new method for self-detecting the relative position of the drone with respect to a reference point or a point block when flying over an area where GPS signals are insufficient is also provided.
- a visual positioning system may be used in an unmanned aerial vehicle (UAV) to obtain additional / alternative positioning information.
- UAV unmanned aerial vehicle
- additional / alternative positioning information can be used to locate the UAV.
- the visual positioning system may capture an image (photo and / or video) of the ground during the flight, and process the image (photo and / or video) in real time to obtain positioning information.
- the visual positioning system may select at least one reference object in the image and analyze the image to calculate the positioning information of the UAV based on the reference object.
- a visual positioning system can be used as a supplementary way to existing positioning systems, and therefore drones can acquire more Accurate positioning information.
- a drone having a visual positioning system according to one or more embodiments of the present disclosure can obtain accurate positioning even when flying in a place where GPS signals are limited or reception is poor, such as when flying between high-rise buildings and structures. information.
- FIG. 1 is a side view of an unmanned aerial vehicle (UAV) 100 according to some embodiments of the present disclosure.
- FIG. 2 is a block diagram of a UAV 100 according to some embodiments of the present disclosure.
- the UAV 100 or UAV is a multi-rotor aircraft.
- UAV 100 can be three-rotor, four-rotor, six-rotor, eight-rotor or other multi-rotor aircraft.
- the UAV 100 includes a body 101, a lens module 102, a matching module 103, and a translation module 104.
- the lens module 102 combined with the matching module 103 and the translation module 104 may be a visual positioning system.
- the matching module 103 and the translation module 104 may be arranged inside the body 101. In one or more embodiments, the matching module 103 and the translation module 104 may be arranged outside the body 101.
- the matching module 103 and the translation module 104 may be provided together with the lens module 102.
- the matching module 103 may be provided together with the lens module 102, and the translation module 104 may be provided within the body 101, and vice versa.
- the body 101 may have different shapes and structures according to the design or needs of the user.
- the body 101 has a lower side 1011.
- the underside 1011 is the bottom of the UAV 100 that faces the ground during the flight of the UAV 100.
- the lens module 102 is disposed on the lower side 1011 of the UAV 100 and is mounted on the bottom surface of the UAV 100.
- the lens module 102 may include a lens unit 1021 and an image sensor unit 1022 connected to each other.
- the image sensor unit 1022 is configured to sense an incident light signal from the lens unit 1021 to generate a series of fish-eye view images.
- the lens unit 1021 includes a wide-angle lens, an ultra-wide-angle lens, or a combination thereof.
- the wide-angle lens includes at least one lens having a field of view of at most 180 degrees.
- the ultra-wide-angle lens unit includes at least one lens having a field of view of at least 180 degrees.
- the ultra-wide-angle lens may be a fisheye lens.
- the lens module 102 may be considered a fisheye lens module.
- the image sensor unit 1022 may include a CCD (Charge Coupled Device) image sensor, a CMOS (Complementary Metal Oxide Semiconductor) image sensor, or a combination thereof.
- the lens module 102 may be controlled to capture or capture a series of images (photos and / or videos) I of the area (eg, the ground area) below the UAV 100 over time during the flight.
- Each image in the series of images I may include reference points or point blocks on the ground area.
- the reference point block may be a specific building or tree on the ground area.
- the series of images I may be a series of fish-eye view images.
- the series of images (photos and / or videos) I captures at least 60 images per second.
- the lens module 102 may start capturing images (photos and / or videos) I.
- the signal strength of the initial positioning information is lower than a predetermined factor.
- the lens module 102 may capture images (photos and / or videos) I from the beginning of the flight, or may not capture images (photos and / or videos) I from the beginning of the flight.
- the lens module 102 may take images (photos and / or videos) I during a predetermined period of time in flight.
- the lens module 102 may capture images (photos and / or videos) I when certain predetermined factors are met, such as when a predetermined height is reached.
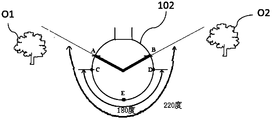
- FIG. 3 is a side view of a lens module 102 according to some embodiments of the present disclosure.
- the lens module 102 may include an ultra-wide-angle lens, such as a fisheye lens.
- the fisheye lens may have a field of view of 220 degrees (such as the coverage of points A to E to B along the circumference in FIG. 3).
- a fisheye lens may capture two distant objects O1 and O2 in FIG. 3.
- the lens module 102 can take a single image I with a 220-degree field of view.
- FIG. 4 illustrates an expanded two-dimensional view 400 of various points shown in the lens module 102 according to some embodiments of the present disclosure. As shown in FIG.
- a two-dimensional illustration of an image of the lens module 102 having a 220-degree field of view and points A, B (as shown in FIG. 3) are shown due to such a wide field of view.
- the lens module 102 can capture an image I having a wider field of view through an ultra-wide-angle lens such as a fisheye lens.
- the lens module 102 can also capture a single image I (such as coverage along points C to E to D along the circumference in FIG. 3) with a 180-degree field of view.
- the lens module 102 may include a wide-angle lens as needed.
- these are just examples and are not intended to be limiting.
- various field angles other than 220 degrees and 180 degrees are also considered.
- the UAV 100 may tilt during flight, which causes the lens module 102 to tilt as well.
- the lens module 102 has a wider field of view.
- the captured image I may contain sufficient ground information to calculate the additional / alternative positioning information of the UAV 100.
- reference point blocks on the ground area are always included in the series of images I, where the reference point blocks are used to calculate additional / alternative positioning information for UAV 100.
- the matching module 103 is electrically coupled with the lens module 102.
- the matching module 103 may be incorporated into a processor, such as a central processing unit (CPU), a digital signal processor (DSP), a programmable controller, an application specific integrated circuit (ASIC), a programmable logic device (PLD) or other similar devices, or a combination of these devices.
- the matching module 13 compares and contrasts features in each of the series of images (photos and / or videos) I to generate or derive first data D1. In other words, the matching module 103 can identify the features in each image I and compare the series of images I to distinguish the differences between the series of images I.
- the matching module 103 may obtain a flying distance or a motion vector of the UAV 100 based on the position of a predetermined reference point in the series of images I.
- the first data D1 may include image data, vector data, raster data, or other data forms, or a combination thereof.
- the translation module 104 is electrically coupled with the matching module 103.
- the translation module 104 may be incorporated into a processor, such as a central processing unit (CPU), a digital signal processor (DSP), a programmable controller, an application specific integrated circuit (ASIC), a programmable logic device ( PLD) or other similar devices, or a combination of these devices.
- the translation module 104 may be incorporated in the same processor as the matching module 103.
- the translation module 104 and the matching module 103 may be incorporated in different processors.
- the translation module 104 translates the first data D1 into positioning data.
- the translation module 104 may receive the first data D1 from the matching module 103, and the translation module 104 may calculate a relative change (e.g., direction / height / speed) of the UAV 100 based on the first data D1 to generate positioning data .
- the calculation may take into account many other known factors, such as time of flight, initial position of the UAV, or other useful factors.
- FIG. 2 and FIG. 5 illustrate four images 501-504 taken by the lens module 102 according to some embodiments of the present disclosure, which represent four views of the ground at different times t1-t4, for example.
- the lens module 102 can capture at least 60 images per second.
- UAV 100 has flown / moved from position P1 to position P4.
- the lens module 102 (for example, the image sensor unit 1022) is configured to capture respective images 501 to 504 in the order of time t1, t2, t3, and t4, respectively. It can be seen that the position of the reference point P in the images 501 to 504 changes according to the positions P1 to P4.
- the UAV 100 can calculate the relative changes of the drone itself in terms of direction / height / speed.
- the matching module 103 may identify the reference point P in a series of images, compare the relative position / position of the same reference point P, and compare the relative change of the relative position / position of the same reference point P.
- the matching module 103 may generate the first data D1 based on a change in the reference point P.
- the translation module 104 may receive the first data D1 and calculate a relative change (eg, direction / height / speed) of the UAV 100 based on the first data D1 to generate relative positioning data of the UAV 100.
- the UAV 100 may further include an antenna module (not shown) to transmit positioning data back to the remote controller (not shown) of the UAV 100.
- a small dot is used to represent a reference point or a point block P.
- the reference point P may be any stationary object (eg, a tree or a building) shown in the images 501-504.
- the UAV 100 with a visual positioning system may acquire additional / alternative positioning information in addition to traditional positioning information, such as GPS signals.
- the lens module 102 may capture an image (photo and / or video) of the ground area during the flight, and the matching module 103 and the translation module 104 may process the image (photo and // Or video) to obtain additional / alternative positioning information for UAV 100.
- UAV 100 using a visual positioning system as a supplementary method on top of existing positioning systems can have more accurate Location information.
- the UAV 100 according to one or more embodiments of the present disclosure with a visual positioning system is even when the UAV 100 is flying around a location where GPS signals are restricted or poorly received, such as flying between high-rise buildings and structures Can also obtain accurate positioning information.
- FIG. 6 is a perspective view of a lens module 102 on a gimbal 601 according to some embodiments of the present disclosure.
- the UAV 100 may include a gimbal 601.
- the gimbal 601 connects the lens module 102 to the body 1011 of the UAV 100.
- the universal joint 601 has at most 2 axes.
- the 2-axis gimbal 601 can also be used to stabilize the lens module 102.
- the pitch and roll angles of the UAV 100 can be compensated, and thus the images taken from the lens module 102 are not affected.
- a 1-axis universal joint may be used. Of course, these are just examples and are not intended to be limiting.
- FIG. 7 is a block diagram of a UAV 700 according to some embodiments of the present disclosure.
- the UAV 700 includes a body 701 and a lens module 702.
- the ontology 701 may include a matching module 703, a translation module 704, and a sensor module 705.
- the lens module 702 in combination with the matching module 703, the translation module 704, and the sensor module 705 may be regarded as a visual positioning system 709.
- the matching module 703, the translation module 704, and the sensor module 705 may be arranged inside the body 701. In one or more embodiments, the matching module 703, the translation module 704, and the sensor module 705 may be arranged together with the lens module 702. Alternatively, one of the matching module 703, the translation module 704, and the sensor module 705 may be arranged with the lens module 702, and the rest may be arranged within the body 701. Alternatively, two of the matching module 703, the translation module 704, and the sensor module 705 may be arranged with the lens module 702, and the other may be arranged within the body 701.
- the vision positioning system 709 of the UAV 700 also includes a sensor module 705.
- the sensor module 705 collects the second data D2, and the sensor module 705 is electrically coupled to the lens module 702 and the translation module 704.
- the sensor module 705 may be incorporated into a processor, such as a central processing unit (CPU), digital signal processor (DSP), programmable controller, application specific integrated circuit (ASIC), programmable logic Device (PLD) or other similar device, or a combination of these devices.
- the sensor module 705 may be incorporated into the same processor as the matching module 703 and the translation module 704. Alternatively, the sensor module 705 may be incorporated into a different processor than the matching module 703 or the translation module 704.
- the sensor module 705 may include a light detection and ranging (LiDAR) sensor, an inertial measurement unit (IMU), a GPS receiver or radar, or a combination thereof.
- the second data D2 includes altitude data, GPS maps, GPS coordinates, or positions relative to at least one surrounding physical object, or a combination thereof.
- the lens module 702 may start capturing an image (photograph and / or video) I.
- the signal strength of the second data D2 (for example, GPS data) is lower than a predetermined factor.
- the translation module 704 may receive the first data D1 from the matching module 703 and the second data D2 from the sensor module 705. In one or more embodiments, the translation module 704 calculates the relative change (eg, direction / height / speed) of the UAV 700 based on the first data D1 in consideration of the second data D2 to generate the relative positioning data of the UAV 700 . In one or more embodiments, the calculation may take into account many other known factors, such as time of flight, initial position of UAV given by GPS, initial height of UAV, speed of UAV, travel by other sensors such as LiDAR sensors, IMU or Data collected by radar. Of course, these are just examples and are not intended to be limiting. In one or more embodiments, the sensor module 705 may include an IMU to compensate or supplement the calculation / location of the translation module 704.
- the sensor module 705 may include an IMU to compensate or supplement the calculation / location of the translation module 704.
- the functions of the lens module 702, the matching module 703, and the translation module 704 may be similar to those of the lens module 102, the matching module 103, and the translation module 104, respectively. Therefore, a detailed description is omitted here for the sake of brevity.
- UAV 700 which uses a visual positioning system as a supplement to existing positioning systems, can have more accurate positioning information .
- the UAV 700 according to one or more embodiments of the present invention having a visual positioning system, even when the UAV 700 is flying in a place where GPS signals are restricted or poorly received, for example, when flying between high-rise buildings and structures Get accurate positioning information.
- FIG. 8 is a block diagram of a UAV 800 according to some embodiments of the present disclosure.
- the UAV 800 includes: a body 801, a lens module 802, a matching module 803, a translation module 804, and a verification module 806.
- the matching module 803, the translation module 804, and the verification module 806 may be arranged within the body 801. In one or more embodiments, the matching module 803, the translation module 804, and the verification module 806 may be arranged together with the lens module 802. Alternatively, one of the matching module 803, the translation module 804, and the verification module 806 may be arranged with the lens module 802, and the rest may be arranged in the body 801. Alternatively, two of the matching module 803, the translation module 804, and the verification module 806 may be arranged with the lens module 802, and the other may be arranged within the body 801.
- UAV 800 also includes a verification module 806.
- the verification module 806 is electrically coupled to the translation module 804.
- the verification module 806 may be incorporated into a processor, such as a central processing unit (CPU), digital signal processor (DSP), programmable controller, application specific integrated circuit (ASIC), programmable logic Device (PLD) or other similar device, or a combination of these devices.
- the verification module 806 may be incorporated into the same processor as the matching module 803 and the translation module 804. Alternatively, the verification module 806 may be incorporated into different processors with the matching module 803 and the translation module 804.
- the verification module 806 may compare the positioning data D3 generated by the translation module 804 with a GPS map (not shown), which may be a copy of the GPS map stored in the UAV 800 in advance. Therefore, the verification module 806 can further verify the position of the UAV 800 by using the visual positioning system as a supplementary method on the existing positioning system, and the UAV 800 can have more accurate positioning information. In one or more embodiments, the verification module 806 may also be used in the UAV 700 as described in FIG. 2 and receive a GPS map from the sensor module 705. For brevity, detailed description is omitted here.
- the functions of the lens module 802, the matching module 803, and the translation module 804 may be similar to those of the lens module 102, the matching module 103, and the translation module 104, respectively. Therefore, a detailed description is omitted here for the sake of brevity.
- FIG. 9 is a method 900 of self-detecting a position of a drone according to some embodiments of the present disclosure.
- the method 900 includes steps 901-904.
- the drone obtains initial positioning data including altitude data.
- the drone may also use many other known data, such as time of flight, speed of travel, data collected by other sensors such as LiDAR sensors, IMU or radar.
- the drone takes a series of fish-eye view images during flight at a rate of more than 60 images per second.
- the drone uses a lens module to capture a ground image.
- the lens module may include a wide-angle lens, an ultra-wide-angle lens, or a combination thereof.
- the wide-angle lens includes at least one lens having a field of view of at most 180 degrees.
- the ultra-wide-angle lens unit includes at least one lens having a field of view of at least 180 degrees.
- the ultra-wide-angle lens may be a fisheye lens.
- the series of fish-eye view images includes at least a first image at a first flight position and a second image at a second flight position.
- the drone may use a 2-axis gimbal to level the lens module to stabilize the lens module.
- the drone compares the relative changes between the series of fisheye view images. In one or more embodiments, the drone also compares this relative change to a GPS map. In one or more embodiments, the drone further measures the distance between the ground and the drone.
- the drone calculates the position of the drone based on the initial positioning data and relative changes.
- the drone converts or translates the image information into the speed and relative flight position / direction information of the drone to determine the drone's own position / position.
- the drone may send at least one of a LiDAR signal, a radar signal, an RF signal, a satellite signal, and the like to the controller.
- the drone may adjust / modify its own position by comparing and contrasting the speed and / or relative flight position / direction information of the converted drone with GPS positioning information.
- the operations of UAV 100, 700, 800 described in FIGS. 1 to 8 may be summarized as steps described in FIG. 9.
- a UAV / drone with a visual positioning system may acquire additional / alternative positioning information in addition to traditional positioning information.
- the UAV / drone can capture images (photos and / or videos) of the ground during the flight, and the UAV / drones can process the images (photos and / or Video) to obtain UAV / UAV positioning information.
- drones that use a visual positioning system as a supplement to existing positioning systems can have more accurate positioning information.
- a drone according to one or more embodiments of the present disclosure having a visual positioning system even when the UAV / drone is flying around a place where GPS reception is restricted or reception is poor, such as between high-rise buildings and structures It is also possible to obtain accurate positioning information.
- a visual positioning system for a drone includes a lens module, a matching module, a sensor module, and a translation module.
- the lens module captures a series of fish-eye view images over time during the flight.
- the matching module derives the first data by comparing and contrasting at least one feature from the fisheye view image.
- the sensor module collects the second data, and the sensor module is electrically coupled to the lens module.
- the translation module is electrically coupled to the sensor module to generate positioning data by processing the first data in consideration of the second data.
- the sensor module includes one or more of a LiDAR sensor, an inertial measurement unit (IMU), a GPS receiver, and a radar.
- IMU inertial measurement unit
- an unmanned aerial vehicle UAV
- UAV unmanned aerial vehicle
- An unmanned aerial vehicle includes a body, a fisheye lens module, a matching module, and a translation module.
- the body has a lower side.
- the fisheye lens module is disposed on the lower side.
- the fisheye lens module has a wide field of view and takes a series of images of the area under the drone over time during the flight.
- the matching module compares and contrasts features in each of the series of images to derive the first data.
- the translation module translates the first data into positioning data.
- a method for self-detecting the position of the drone when flying over an area with insufficient GPS signals.
- the method includes: (1) obtaining initial positioning data containing altitude data; (2) taking a series of fish-eye view images at a speed of more than 60 images per second during flight; (3) comparing the series of fish-eye view images (4) Calculate the position of the UAV based on the initial positioning data and relative changes.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Studio Devices (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Abstract
L'invention concerne un système de positionnement visuel, un véhicule aérien sans pilote et un procédé d'auto-détection de la position d'un véhicule aérien sans pilote. Le système de positionnement visuel (709) comprend un module de lentille (702), un module d'appariement (703), un module de traduction (704) et un module de capteur (705) ; le véhicule aérien sans pilote (100) comprend un corps (101), le corps (101) a un côté inférieur (1011), et le module de lentille (702) est situé sur le côté inférieur (1011) ; le module de lentille (702) a un large champ de vision, et capture une série d'images (I) d'une région située sous le véhicule aérien sans pilote (100) au cours du temps pendant le vol ; le module d'appariement (703) compare des caractéristiques dans chaque image (I) de la série d'images (I), de façon à dériver des premières données (D1) ; et le module de traduction (704) traduit les premières données (D1) en données de positionnement. Ledit système de positionnement visuel permet au véhicule aérien sans pilote d'obtenir des informations de positionnement supplémentaires/alternatives.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2018/094501 WO2020006709A1 (fr) | 2018-07-04 | 2018-07-04 | Système de positionnement visuel, véhicule aérien sans pilote et procédé d'auto-détection de position de véhicule aérien sans pilote |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2018/094501 WO2020006709A1 (fr) | 2018-07-04 | 2018-07-04 | Système de positionnement visuel, véhicule aérien sans pilote et procédé d'auto-détection de position de véhicule aérien sans pilote |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020006709A1 true WO2020006709A1 (fr) | 2020-01-09 |
Family
ID=69060710
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2018/094501 Ceased WO2020006709A1 (fr) | 2018-07-04 | 2018-07-04 | Système de positionnement visuel, véhicule aérien sans pilote et procédé d'auto-détection de position de véhicule aérien sans pilote |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2020006709A1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111208526A (zh) * | 2020-01-17 | 2020-05-29 | 西北工业大学 | 基于激光雷达与定位向量匹配的多无人机协同定位方法 |
| KR20220156342A (ko) * | 2021-05-18 | 2022-11-25 | 인천대학교 산학협력단 | 지면충격 저감형 드론 |
| EP4246268A1 (fr) | 2022-03-16 | 2023-09-20 | Spleenlab GmbH | Procédé de détermination sécurisée d'un trajet de vol d'un véhicule aérien sans pilote et véhicule aérien sans pilote |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104360688A (zh) * | 2014-11-19 | 2015-02-18 | 云南电网公司电力科学研究院 | 一种巡线无人机的导向装置及其控制方法 |
| CN204594468U (zh) * | 2015-05-15 | 2015-08-26 | 零度智控(北京)智能科技有限公司 | 飞行器飞行误差矫正装置及无人飞行器 |
| CN104932523A (zh) * | 2015-05-27 | 2015-09-23 | 深圳市高巨创新科技开发有限公司 | 一种无人飞行器的定位方法及装置 |
| US20160227197A1 (en) * | 2011-09-28 | 2016-08-04 | Kabushiki Kaisha Topcon | Image Acquiring Device And Image Acquiring System |
| CN106325305A (zh) * | 2015-06-29 | 2017-01-11 | 优利科技有限公司 | 对地定位或导航用相机、飞行器及其导航方法和系统 |
| CN108195359A (zh) * | 2017-12-12 | 2018-06-22 | 北京建筑大学 | 空间数据的采集方法及系统 |
-
2018
- 2018-07-04 WO PCT/CN2018/094501 patent/WO2020006709A1/fr not_active Ceased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160227197A1 (en) * | 2011-09-28 | 2016-08-04 | Kabushiki Kaisha Topcon | Image Acquiring Device And Image Acquiring System |
| CN104360688A (zh) * | 2014-11-19 | 2015-02-18 | 云南电网公司电力科学研究院 | 一种巡线无人机的导向装置及其控制方法 |
| CN204594468U (zh) * | 2015-05-15 | 2015-08-26 | 零度智控(北京)智能科技有限公司 | 飞行器飞行误差矫正装置及无人飞行器 |
| CN104932523A (zh) * | 2015-05-27 | 2015-09-23 | 深圳市高巨创新科技开发有限公司 | 一种无人飞行器的定位方法及装置 |
| CN106325305A (zh) * | 2015-06-29 | 2017-01-11 | 优利科技有限公司 | 对地定位或导航用相机、飞行器及其导航方法和系统 |
| CN108195359A (zh) * | 2017-12-12 | 2018-06-22 | 北京建筑大学 | 空间数据的采集方法及系统 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111208526A (zh) * | 2020-01-17 | 2020-05-29 | 西北工业大学 | 基于激光雷达与定位向量匹配的多无人机协同定位方法 |
| KR20220156342A (ko) * | 2021-05-18 | 2022-11-25 | 인천대학교 산학협력단 | 지면충격 저감형 드론 |
| KR102538809B1 (ko) * | 2021-05-18 | 2023-06-02 | 주식회사 라스트마일 | 지면충격 저감형 드론 |
| EP4246268A1 (fr) | 2022-03-16 | 2023-09-20 | Spleenlab GmbH | Procédé de détermination sécurisée d'un trajet de vol d'un véhicule aérien sans pilote et véhicule aérien sans pilote |
| DE102022106110A1 (de) | 2022-03-16 | 2023-09-21 | Spleenlab GmbH | Verfahren zum sicheren Bestimmen eines Flugpfads eines unbemannten Fluggeräts und unbemanntes Fluggerät |
| US12451019B2 (en) | 2022-03-16 | 2025-10-21 | Spleenlab GmbH | Method for safely determining a flight path of an unmanned aerial vehicle, and unmanned aerial vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12405113B2 (en) | System and method for auto-return | |
| US10650235B2 (en) | Systems and methods for detecting and tracking movable objects | |
| US10802509B2 (en) | Selective processing of sensor data | |
| CN110537365B (zh) | 信息处理装置、信息处理方法、信息处理程序、图像处理装置以及图像处理系统 | |
| CN205353774U (zh) | 一种伴随拍摄飞行器的无人机航拍系统 | |
| US20140192193A1 (en) | Method for acquiring images from arbitrary perspectives with uavs equipped with fixed imagers | |
| CN112650267B (zh) | 一种飞行器的飞行控制方法、装置及飞行器 | |
| JP6138326B1 (ja) | 移動体、移動体の制御方法、移動体を制御するプログラム、制御システム、及び情報処理装置 | |
| CN105956081B (zh) | 地面站地图更新方法及装置 | |
| CN104007767A (zh) | 无人机空间导航方法、无人机控制系统及控制装置 | |
| CN110716586A (zh) | 无人机的拍照控制方法、装置、无人机和存储介质 | |
| WO2020198963A1 (fr) | Procédé et appareil de traitement de données associés à un dispositif de photographie, et dispositif de traitement d'image | |
| WO2020006709A1 (fr) | Système de positionnement visuel, véhicule aérien sans pilote et procédé d'auto-détection de position de véhicule aérien sans pilote | |
| WO2018059295A1 (fr) | Procédé, dispositif et système de commande de véhicule aérien à rotors multiples | |
| CN203204299U (zh) | 空中360°全景照片拍摄装置 | |
| US20230316939A1 (en) | Collision detection and avoidance for unmanned aerial vehicle systems and methods | |
| CN111857188A (zh) | 一种空中远距离目标跟拍系统和方法 | |
| US11415990B2 (en) | Optical object tracking on focal plane with dynamic focal length | |
| JP6949930B2 (ja) | 制御装置、移動体および制御方法 | |
| CN110686664A (zh) | 视觉定位系统、无人机以及自检测无人机自身位置的方法 | |
| CN116222514A (zh) | 一种圆迹飞行地面态势监测方法及装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18925354 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18925354 Country of ref document: EP Kind code of ref document: A1 |