WO2024252976A1 - Lower nozzle attachment/detachment device - Google Patents
Lower nozzle attachment/detachment device Download PDFInfo
- Publication number
- WO2024252976A1 WO2024252976A1 PCT/JP2024/019481 JP2024019481W WO2024252976A1 WO 2024252976 A1 WO2024252976 A1 WO 2024252976A1 JP 2024019481 W JP2024019481 W JP 2024019481W WO 2024252976 A1 WO2024252976 A1 WO 2024252976A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- lower nozzle
- robot arm
- attachment
- control unit
- holder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B22—CASTING; POWDER METALLURGY
- B22D—CASTING OF METALS; CASTING OF OTHER SUBSTANCES BY THE SAME PROCESSES OR DEVICES
- B22D41/00—Casting melt-holding vessels, e.g. ladles, tundishes, cups or the like
- B22D41/14—Closures
- B22D41/22—Closures sliding-gate type, i.e. having a fixed plate and a movable plate in sliding contact with each other for selective registry of their openings
- B22D41/28—Plates therefor
- B22D41/34—Supporting, fixing or centering means therefor
Definitions
- the present invention relates to a lower nozzle attachment/detachment device for attaching/detaching a lower nozzle used in a sliding nozzle device that controls the flow rate of molten steel during continuous casting of molten steel.
- a refractory nozzle i.e., the lower nozzle
- the lower nozzle is usually placed on the underside of the plate brick, i.e., the lower plate, which controls the flow rate of molten steel, to straighten the flow of molten steel.
- This lower nozzle needs to be replaced sooner than the plate lifespan expires due to damage caused by splash adhesion and oxygen cleaning.
- the lower nozzle is usually held by a bayonet mechanism via an annular retaining frame that holds the lower nozzle, against a cylindrical sleeve metal fitting fixed to the underside of the plate storage frame that houses the lower plate, so that it can be replaced separately.
- Patent Document 1 discloses an attachment/detachment device that includes a drive mechanism that can control the torque and rotation angle.
- Patent Document 2 also discloses a method for rotating the retaining metal frame of the lower nozzle with a specified torque.
- the inventors conducted multiple tests to attach and detach the lower nozzle, they found that it is not possible to reliably attach and detach the lower nozzle by simply controlling the torque and rotation angle as in conventional technology.
- the lower nozzle is significantly damaged and its shape changes before and after use, and the metal retaining frame and sleeve metal of the lower nozzle also undergo significant thermal expansion due to temperature changes and deformation due to external forces, resulting in significant changes in frictional resistance when attaching and detaching. For this reason, it is not possible to reliably attach and detach the lower nozzle by simply controlling the torque and rotation angle.
- the problem that this invention aims to solve is to provide a lower nozzle attachment/detachment device that can reliably attach and detach the lower nozzle.
- the inventors conducted further tests of attaching and detaching the lower nozzle, and found that it is effective to control the movement of the robot arm while monitoring the reaction forces acting on the robot arm in the forward/backward and rotational directions, as well as the amount of movement of the robot arm in the forward/backward and rotational directions when attaching and detaching the lower nozzle.
- a lower nozzle attachment/detachment device for attaching and detaching a refractory lower nozzle to and from a refractory lower plate attached to a sliding nozzle device
- the robot arm includes a holder that is detachable from a holding frame that holds the lower nozzle, a robot arm having the holder at its tip, a force sensor that detects a reaction force in a front-rear direction and a reaction force in a rotational direction that the holder receives from the holding frame as the robot arm moves, and a control unit that monitors and controls the movement of the robot arm, The control unit controls the movement of the robot arm while monitoring the reaction forces detected by the force sensors, as well as the forward/backward movement and rotational movement of the robot arm, thereby performing attachment and detachment of the lower nozzle.
- the present invention allows the lower nozzle to be attached and detached reliably.
- FIG. 1 is an overall configuration diagram of a lower nozzle attachment/detachment device according to an embodiment of the present invention.
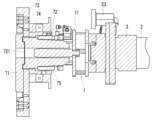
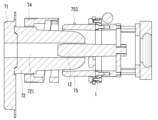
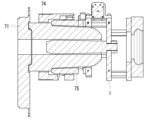
- FIG. 2 is a cross-sectional view of a main portion showing a state in which the lower nozzle attachment/detachment device of FIG. 1 is used.
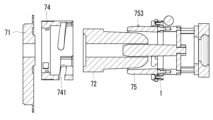
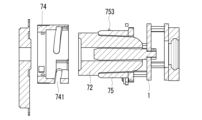
- 2 is an exploded side view showing a holder and a lower nozzle to be attached and detached in the lower nozzle attachment/detachment device of FIG. 1 .
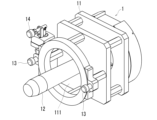
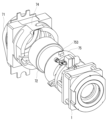
- 2 is an exploded perspective view showing a holder and a lower nozzle to be attached and detached in the lower nozzle attachment/detachment device of FIG. 1 ;
- FIG. 2 is a perspective view showing a holder in the lower nozzle attachment/detachment device of FIG. 1 alone.
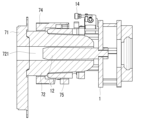
- FIG. 4 is a perspective view of a main part showing a state in which a holder is engaged with a holding metal frame in a lower nozzle removal operation by the lower nozzle installation/removal device of FIG. 1 ;
- FIG. 6B is a longitudinal cross-sectional view of FIG. 6B is a perspective view of the main part showing a state in which the holder is rotated counterclockwise and moved rearward from the state in FIG. 6A to remove the lower nozzle.
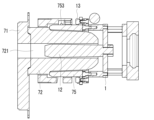
- FIG. FIG. 7B is a longitudinal cross-sectional view of FIG. 7B is a perspective view of the main part showing the state in which the holder is moved rearward from the state in FIG. 7A to remove the retaining metal frame that holds the lower nozzle from the sleeve metal.
- FIG. 6B is a longitudinal cross-sectional view of FIG. 6B is a perspective view of the main part showing a state in which the holder is rotated counterclockwise and moved rearward from the state in FIG. 6A to remove the lower nozzle
- FIG. 8B is a longitudinal cross-sectional view of FIG. 8A.
- 8B is a perspective view of the main part showing the state in which the holder has been moved rearward from the state shown in FIG. 8A to remove the lower nozzle from the sleeve metal fitting.
- FIG. 9B is a longitudinal cross-sectional view of FIG. 9A.
- 2 is a perspective view of a main part showing a state in which a holding metal frame holding a lower nozzle is attached to a holder in an installation operation of the lower nozzle by the lower nozzle installation/removal device of FIG. 1 ;
- FIG. 10B is a longitudinal cross-sectional view of FIG. 10B is a perspective view of the main part showing the state in which the holder has been moved forward from the state in FIG.
- FIG. 11B is a longitudinal cross-sectional view of FIG. 11B is a perspective view of the main part showing a state in which the lower nozzle is attached to the lower plate by moving the holder forward while rotating it clockwise from the state shown in FIG. 11A .
- FIG. 12B is a longitudinal cross-sectional view of FIG. 12A.
- Fig. 1 shows the overall configuration of a lower nozzle attachment/detachment device A according to one embodiment of the present invention
- Fig. 2 shows a cross section of a main part of the lower nozzle attachment/detachment device A in use.
- a ladle 4 is laid on its side on a ladle receiver 6 placed on a floor 5.
- a sliding nozzle device 7 is attached to the bottom 41 of this ladle, and in the state shown in Fig. 1, the sliding direction is approximately vertical.
- the lower nozzle attachment/detachment device A is a device for attaching and detaching a lower nozzle 72 made of refractory material to a lower plate 71 (see FIG.
- the lower nozzle 72 is held by a bayonet mechanism via a circular holding frame 75 that holds the lower nozzle 72 to a cylindrical sleeve metal 74 fixed to the lower surface side of a plate storage metal frame 73 that stores the lower plate 71.
- the lower nozzle attachment/detachment device A includes a holder 1 that can be attached and detached to a circular ring-shaped holding frame 75 that holds the lower nozzle 72, a robot arm 2 having the holder 1 at its tip, a force sensor 3 that detects the forward/backward reaction force and rotational reaction force that the holder 1 receives from the holding frame 75 as the robot arm 2 moves, and a control unit 21 that monitors and controls the operation of the robot arm 2.
- the base end of the robot arm 2 is fixed to a robot arm stand 22 installed on a floor 5.
- a force sensor 3 is attached to the tip of the robot arm 2. At this time, the force sensor 3 and the tip of the robot arm 2 are arranged in series so that their central axes coincide.
- the force sensor 3 can also be provided on the holder 1 side independently of the robot arm 2.
- the force sensor 3 and the tip of the robot arm 2 are also arranged in series so that their central axes coincide.
- the force sensor that detects the reaction force in this way is also called a force sensor, and a sensor that is generally used in robot arms and the like can be used.
- a six-axis force sensor is used as the force sensor 3.
- the robot arm 2 is a six-axis vertical articulated robot arm, and the attitude and position of the holder 1 attached to the tip of the robot arm 2 can be freely changed.
- a stereo sensor 23 having a camera and a laser irradiator is attached to the tip of the robot arm 2.
- the image captured by the camera is input to an image processing device, and the three-dimensional position coordinates are corrected by an image processing method.
- the robot arm 2 can move the holder 1 to a predetermined position for attaching and detaching the lower nozzle 72. Meanwhile, the above-mentioned reaction forces (front-rear reaction forces and rotational reaction forces) detected by the force sensor 3 are always input to the control unit 21.
- the control unit 21 performs attachment and detachment of the lower nozzle 72 by controlling the operation of the robot arm 2 while monitoring the above-mentioned reaction forces detected by the force sensor 3, as well as the amount of movement of the robot arm 2 in the front-rear direction and the amount of movement in the rotational direction, which will be described in detail later.
- the amount of movement of the robot arm 2 in the front-rear direction and the amount of movement in the rotational direction are recognized by the robot arm 2 itself. That is, the robot arm 2 has a motor with an encoder for moving in the front-rear direction and the rotational direction, and the control unit 21 recognizes the amount of movement in the front-rear direction and the rotational direction based on the encoder value.
- Figures 3 and 4 show an exploded view of the holder 1 and the lower nozzle 72, which is attached and detached by the lower nozzle attachment/detachment device A including the holder 1.
- Figure 5 shows a perspective view of the holder 1 alone. Note that the plate storage metal frame is omitted in Figures 3 and 4.
- the holder 1 has a base body 11, and a core rod 12, a locking pin 13, and a clamp 14 attached to the base body 11.
- the base 11 is an annular structure having a space 111 into which the lower end of the lower nozzle 72 can be inserted, and its base end is attached to the tip of the robot arm 2 .
- the core rod 12 is provided along the central axis of the space 111 , and during use, for example, as shown in FIG. 2 , is inserted into the nozzle hole 721 of the lower nozzle 72 to hold the lower nozzle 72 .
- the locking pins 13 are provided at two locations so as to protrude further from the tip of the base body 11, and the clamp 14 is provided in the vicinity of one of the locking pins 13. The functions of the locking pins 13 and the clamp 14 will be described later.
- the holding metal frame 75 which is attached to and detached from the holder 1, has, at its lower end side, two engagement grooves 751 that engage with the locking pin 13 and two engagement holes 752 into which the locking pin 13 is inserted and engaged.
- the engagement groove 751 engages with the locking pin 13 when the lower nozzle 72 is removed
- the engagement hole 752 engages with the locking pin 13 when the lower nozzle 72 is attached. That is, when the lower nozzle 72 is removed, the locking pin 13 is engaged with the groove-shaped engagement groove 751 so as not to interfere with the locking pin 13 due to the variation in the position of the locking pin 13 in the rotational direction.
- FIG. 2 shows the state at the time of attachment, that is, the state in which the engagement hole 752 is engaged with the locking pin 13.
- the retaining metal frame 75 is attached to and detached from the sleeve metal 74 by a bayonet mechanism while holding the lower nozzle 72.
- the retaining metal frame 75 has protrusions 753 at three locations on its outer circumferential surface, and the sleeve metal 74 has spiral grooves 741 at three locations into which the protrusions 753 are fitted.
- a detaching operation for detaching the lower nozzle will be described.
- a laser is emitted from the laser irradiator of the stereo sensor 23 toward a marker (not shown) that is a photographing reference portion provided on the sliding nozzle device 7, and the image is photographed by a camera and processed to calculate the deviation from the reference position of the sliding nozzle device 7 and correct the three-dimensional position coordinates of the sliding nozzle device 7.
- the robot arm 2 operates and the holder 1 attached to the robot arm 2 moves to a predetermined position in front of the lower nozzle 72 attached to the sliding nozzle device 7.
- FIG. 1 shows a state in the middle of moving to this predetermined position.
- control unit 21 controls the operation of the robot arm 2 to move the holder 1 to the above-mentioned predetermined position, stop it at that position, and then move it further forward toward the lower nozzle 72.
- the above-mentioned two locking pins 13 engage with the two engagement grooves 751, respectively, and the core rod 12 is inserted into the nozzle hole 721.
- Figures 6A and 6B show this state in a perspective view and a vertical cross section. Note that the plate storage metal frame has been omitted from Figures 6A and 6B. This also applies to the subsequent figures.
- the control unit 21 rotates the holder 1 in a direction in which the bayonet mechanism is loosened (counterclockwise in this embodiment) by controlling the operation of the robot arm 2, and moves the holder 1 in a direction in which the lower nozzle 72 is removed, that is, in the rearward direction.
- the control unit 21 controls the operation of the robot arm 2 while monitoring the above-mentioned reaction forces detected by the force sensor 3, as well as the rearward movement amount and rotational movement amount of the robot arm 2.
- FIG. 7A and 7B show this state in an oblique view and a vertical cross section. That is, in this state, the bayonet mechanism is normally released, and it can be determined that the removal of the lower nozzle 72 has been completed at this stage.
- the amount of movement of the robot arm 2 in the backward and rotational directions from the state shown in FIG. 6A and FIG. 6B to the state shown in FIG. 7A and FIG. 7B is approximately 3 mm and 25 degrees, respectively.
- control unit 21 controls the operation of the robot arm 2 to move the holder 1 further backward, and removes the holding frame 75 holding the lower nozzle 72 from the sleeve metal 74 as shown in Figs. 8A and 8B.
- control unit 21 separates the seal joint between the lower nozzle 72 and the lower plate 71 by moving the robot arm 2, for example, in the vertical direction, as necessary.
- control unit 21 controls the operation of the robot arm 2 to move the holder 1 further backward. This allows the lower nozzle 72 to be removed from the sleeve metal 74 as shown in Figs. 9A and 9B.
- the control unit 21 controls the operation of the robot arm 2 to tilt the holder 1 downward.
- the clamp 14 described above can be operated to reliably engage the locking pin 13 with the engagement groove 751. This allows only the lower nozzle 72 to fall reliably when the holder 1 is tilted downward without the holding frame 75 falling.
- the control unit 21 judges that there is a removal abnormality and stops the operation of the robot arm 2.
- the fact that at least one of the reaction forces detected by the force sensor 3 reaches a predetermined set value means that the bayonet mechanism is difficult to loosen due to an increase in friction resistance in the bayonet mechanism, etc., and if the removal operation is continued in this state, there is a risk of damage to the holder 1, robot arm 2, etc.
- the control unit 21 judges that there is a removal abnormality and stops the operation of the robot arm 2. Note that after stopping the operation of the robot arm 2, the control unit 21 can once operate the robot arm 2 in the opposite direction and then resume the above-mentioned removal operation.
- the holding metal frame 75 holding the lower nozzle 72 is attached to the holder 1 attached to the tip of the robot arm 2. Specifically, in this embodiment, the holding metal frame 75 holding the lower nozzle 72 is attached to the holder 1 by inserting the locking pin 13 of the holder 1 into the engagement hole 752 of the holding metal frame 75.
- Figures 10A and 10B show this state in a perspective view and a vertical cross section. Note that the above-mentioned work of attaching the holding metal frame 75 holding the lower nozzle 72 to the holder 1 can be performed by an operator. At this time, a seal joint material can be applied or installed on the upper end surface of the lower nozzle 72.
- a laser is emitted from the laser irradiator of the stereo sensor 23 toward a marker (not shown) that is a shooting reference portion provided on the sliding nozzle device 7, and the image is photographed by a camera and processed to calculate the deviation from the reference position of the sliding nozzle device 7 and correct the three-dimensional position coordinates of the sliding nozzle device 7.
- the robot arm 2 operates and the holding metal frame 75 and lower nozzle attached to the holder 1 move to a predetermined position just before the sleeve metal 74 fixed to the sliding nozzle device 7.
- control unit 21 controls the operation of the robot arm 2 to move the holder 1 to the above-mentioned predetermined position, stop it at that position, and then move it further forward toward the sleeve metal 74.
- the upper end surface (seal joint material) of the lower nozzle 72 comes into contact with the lower plate 71 and the protrusion 753 of the holding metal frame 75 fits into the groove 741 of the sleeve metal 74, resulting in a position where the bayonet mechanism can be configured.
- Figures 11A and 11B show this state in an oblique view and a vertical cross section.
- control unit 21 rotates the holder 1 in the direction in which the bayonet mechanism described above tightens (clockwise in this embodiment) by controlling the operation of the robot arm 2, and moves the holder 1 in the direction in which the lower nozzle 72 is attached, i.e., forward.
- control unit 21 controls the operation of the robot arm 2 while monitoring the above-mentioned reaction forces detected by the force sensor 3, as well as the forward movement amount and rotational movement amount of the robot arm 2.
- control unit 21 controls the operation of the robot arm 2 to move the holder 1 backward.
- the locking pin 13 of the holder 1 disengages from the engagement hole 752 of the holding metal frame 75, and only the holder 1 moves backward.
- the control unit 21 judges that the installation is abnormal and stops the operation of the robot arm 2.
- the bayonet mechanism is difficult to tighten due to an increase in friction resistance in the bayonet mechanism, and if the installation operation is continued as it is, there is a risk of damage to the holder 1, the robot arm 2, etc.
- the control unit 21 judges that the installation is abnormal and stops the operation of the robot arm 2 if at least one of the reaction forces detected by the force sensor 3 reaches a predetermined set value and at least one of the forward movement amount and the rotational movement amount of the robot arm does not reach a predetermined set value. Note that after stopping the operation of the robot arm 2, the control unit 21 can once operate the robot arm 2 in the reverse direction and then resume the above-mentioned installation operation.
- control unit 21 performs attachment and detachment of the lower nozzle by controlling the operation of the robot arm 2 while monitoring the above-mentioned reaction forces detected by the force sensor 3, as well as the amount of movement of the robot arm 2 in the forward and backward directions and the rotational direction. This allows the lower nozzle 72 to be attached and detached reliably.
- a Lower nozzle attachment/detachment device 1 Holder 11 Base 111 Space 12 Core rod 13 Locking pin 14 Clamp 2 Robot arm 21 Control unit 22 Stand 23 Three-dimensional sensor 3 Force sensor 4 Ladle 41 Bottom of ladle 5 Floor 6 Ladle receiving part 7 Sliding nozzle device 71 Lower plate 72 Lower nozzle 721 Nozzle hole 73 Plate storage metal frame 74 Sleeve metal 741 Groove 75 Holding metal frame 751 Engagement groove 752 Engagement hole 753 Protrusion
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Casting Support Devices, Ladles, And Melt Control Thereby (AREA)
Abstract
Description
本発明は、溶鋼の連続鋳造において、溶鋼流量を制御するスライディングノズル装置に使用される下部ノズルの取付け/取外し、すなわち着脱を行うための下部ノズル着脱装置に関する。 The present invention relates to a lower nozzle attachment/detachment device for attaching/detaching a lower nozzle used in a sliding nozzle device that controls the flow rate of molten steel during continuous casting of molten steel.
溶鋼の連続鋳造で使用されるスライディングノズル装置において、通常、溶鋼流量を制御するプレートれんが、すなわち下プレートの下面側には、溶鋼の流れを整流するために耐火物製のノズル、すなわち下部ノズルを配置している。この下部ノズルは飛散するスプラッシュの付着や酸素洗浄によるダメージでプレート寿命より早く交換が必要となる。そのため、通常、下部ノズルは、単独で交換可能となるように、下プレートを収納するプレート収納金枠の下面側に固定されている円筒状のスリーブ金物に対して、下部ノズルを保持する円環状の保持金枠を介してバイヨネット機構によって保持されている。 In sliding nozzle devices used in continuous casting of molten steel, a refractory nozzle, i.e., the lower nozzle, is usually placed on the underside of the plate brick, i.e., the lower plate, which controls the flow rate of molten steel, to straighten the flow of molten steel. This lower nozzle needs to be replaced sooner than the plate lifespan expires due to damage caused by splash adhesion and oxygen cleaning. For this reason, the lower nozzle is usually held by a bayonet mechanism via an annular retaining frame that holds the lower nozzle, against a cylindrical sleeve metal fitting fixed to the underside of the plate storage frame that houses the lower plate, so that it can be replaced separately.
このような下部ノズル及びその保持金枠を着脱するための装置として、例えば特許文献1には、トルクと回転角が制御できる駆動機構を含む着脱装置が開示されている。また特許文献2には、規定のトルクで下部ノズルの保持金枠を回転させる方法が開示されている。
As an example of a device for attaching and detaching such a lower nozzle and its retaining metal frame,
本発明者らが下部ノズルの着脱試験を重ねたところ、従来技術のようにトルク及び回転角を制御するだけでは、下部ノズルの着脱を確実に行うことができないことがわかった。すなわち、下部ノズルは使用前と使用後で大きく溶損し形状が変化し、また、下部ノズルの保持金枠やスリーブ金物も温度変化による熱膨張や外力による変形が大きいため着脱時の摩擦抵抗が大きく変化する。そのため、トルク及び回転角を制御するだけでは下部ノズルの着脱を確実に行うことができない。 After the inventors conducted multiple tests to attach and detach the lower nozzle, they found that it is not possible to reliably attach and detach the lower nozzle by simply controlling the torque and rotation angle as in conventional technology. In other words, the lower nozzle is significantly damaged and its shape changes before and after use, and the metal retaining frame and sleeve metal of the lower nozzle also undergo significant thermal expansion due to temperature changes and deformation due to external forces, resulting in significant changes in frictional resistance when attaching and detaching. For this reason, it is not possible to reliably attach and detach the lower nozzle by simply controlling the torque and rotation angle.
そこで本発明が解決しようとする課題は、下部ノズルの着脱を確実に行うことのできる下部ノズル着脱装置を提供することにある。 The problem that this invention aims to solve is to provide a lower nozzle attachment/detachment device that can reliably attach and detach the lower nozzle.
上記課題を解決するために、本発明者らが下部ノズルの着脱試験を更に重ねた結果、下部ノズルの着脱時のロボットアームの動作制御において、ロボットアームに作用する前後方向及び回転方向の各反力、並びにロボットアームの前後方向及び回転方向の各動作量を監視しながらロボットアームの動作を制御することが有効であることがわかった。 In order to solve the above problem, the inventors conducted further tests of attaching and detaching the lower nozzle, and found that it is effective to control the movement of the robot arm while monitoring the reaction forces acting on the robot arm in the forward/backward and rotational directions, as well as the amount of movement of the robot arm in the forward/backward and rotational directions when attaching and detaching the lower nozzle.
すなわち本発明の一観点によれば、次の下部ノズル着脱装置が提供される。
スライディングノズル装置に装着されている耐火物製の下プレートに対して、耐火物製の下部ノズルを着脱するための下部ノズル着脱装置であって、
前記下部ノズルを保持する保持金枠に着脱可能な保持具、この保持具を先端に有するロボットアーム、このロボットアームの動作に伴い前記保持具が前記保持金枠より受ける前後方向の反力及び回転方向の反力を検出する力センサ、並びに前記ロボットアームの動作を監視し制御する制御部を含み、
前記制御部は、前記力センサが検出する各反力、並びに前記ロボットアームの前後方向の動作量及び回転方向の動作量を監視しながら当該ロボットアームの動作を制御することにより下部ノズルの着脱を実行する、下部ノズル着脱装置。
That is, according to one aspect of the present invention, there is provided the following lower nozzle attachment/detachment device.
A lower nozzle attachment/detachment device for attaching and detaching a refractory lower nozzle to and from a refractory lower plate attached to a sliding nozzle device,
the robot arm includes a holder that is detachable from a holding frame that holds the lower nozzle, a robot arm having the holder at its tip, a force sensor that detects a reaction force in a front-rear direction and a reaction force in a rotational direction that the holder receives from the holding frame as the robot arm moves, and a control unit that monitors and controls the movement of the robot arm,
The control unit controls the movement of the robot arm while monitoring the reaction forces detected by the force sensors, as well as the forward/backward movement and rotational movement of the robot arm, thereby performing attachment and detachment of the lower nozzle.
本発明によれば、下部ノズルの着脱を確実に行うことができる。 The present invention allows the lower nozzle to be attached and detached reliably.
図1に、本発明の一実施形態である下部ノズル着脱装置Aの全体構成を示している。また図2には、下部ノズル着脱装置Aの使用状態を要部の断面で示している。
図1において、鋳造が終わった直後の取鍋4が床5に設置された取鍋受部6の上で横に倒されている。この取鍋の底41にはスライディングノズル装置7が取り付けられ、図1の状態では摺動方向がほぼ鉛直となっている。
下部ノズル着脱装置Aは、スライディングノズル装置7に装着されている耐火物製の下プレート71(図2参照)に対して、耐火物製の下部ノズル72を着脱するための装置である。図2に表れているように下部ノズル72は、下プレート71を収納するプレート収納金枠73の下面側に固定されている円筒状のスリーブ金物74に対して、下部ノズル72を保持する円環状の保持金枠75を介してバイヨネット機構によって保持されている。
Fig. 1 shows the overall configuration of a lower nozzle attachment/detachment device A according to one embodiment of the present invention, and Fig. 2 shows a cross section of a main part of the lower nozzle attachment/detachment device A in use.
In Fig. 1, immediately after casting, a
The lower nozzle attachment/detachment device A is a device for attaching and detaching a
下部ノズル着脱装置Aは、下部ノズル72を保持する円環状の保持金枠75に着脱可能な保持具1、この保持具1を先端に有するロボットアーム2、このロボットアーム2の動作に伴い保持具1が保持金枠75より受ける前後方向の反力及び回転方向の反力を検出する力センサ3、並びにロボットアーム2の動作を監視し制御する制御部21を含む。
図1に示しているように、本実施形態においてロボットアーム2は、その基端が床5に設置されたロボットアーム用の架台22に固定されている。そして、このロボットアーム2の先端部に力センサ3が取り付けられている。このとき、力センサ3とロボットアーム2の先端部とは中心軸が一致するように直列に配置される。なお、力センサ3は、ロボットアーム2から独立して保持具1側に設けることもできる。この場合も、力センサ3とロボットアーム2の先端部とは中心軸が一致するように直列に配置される。なお、このように反力を検出する力センサは、力覚センサとも称されておりロボットアーム等に一般的に使用されているものを使用することができ、本実施形態では力センサ3として6軸力センサを使用している。また、ロボットアーム2は6軸の垂直多関節ロボットアームであり、その先端に取り付けられた保持具1の姿勢や位置を自在に動かすことが可能である。
The lower nozzle attachment/detachment device A includes a
As shown in FIG. 1, in this embodiment, the base end of the
本実施形態においてロボットアーム2の先端部分には、カメラとレーザー照射機を有する立体センサ23が取り付けられている。カメラで撮影された画像は画像処理装置に入力されて、画像処理法によって3次元位置座標が補正される。この座標情報を制御部21に入力することで、ロボットアーム2は、保持具1を、下部ノズル72を着脱するための所定位置まで移動することができる。一方、力センサ3が検出する上述の各反力(前後方向の反力及び回転方向の反力)は、常に制御部21に入力されている。そして詳細は後述するが、制御部21は、力センサ3が検出する上述の各反力、並びにロボットアーム2の前後方向の動作量及び回転方向の動作量を監視しながらロボットアーム2の動作を制御することにより、下部ノズル72の着脱を実行する。なお、ロボットアーム2の前後方向の動作量及び回転方向の動作量は、ロボットアーム2自体で認識する。すなわち、ロボットアーム2は、前後方向及び回転方向の動作をさせるためのエンコーダ付モータを有し、そのエンコーダ値に基づいて制御部21が前後方向の動作量及び回転方向の動作量を認識する。
In this embodiment, a
次に、保持具1の構成について説明する。図3及び図4には、保持具1と、この保持具1を含む下部ノズル着脱装置Aにより着脱される下部ノズル72等とを分解して示している。また、図5には保持具1単体を斜視図で示している。なお、図3及び図4においてプレート収納金枠は省略している。
図2並びに図3から図5に表れているように、保持具1は、基体11と、この基体11に取り付けられた、芯棒12、係止ピン13及びクランプ14を有する。
基体11は、下部ノズル72の下端部を挿入可能な空間111を有する円環状の構造体であり、その基端部がロボットアーム2の先端に取り付けられる。
芯棒12は、空間111の中心軸に沿って設けられ、使用時には例えば図2に示すように下部ノズル72のノズル孔721に挿入され、その下部ノズル72を保持する。
係止ピン13は、基体11の先端部から更に突出するように2箇所に設けられ、クランプ14は、一方の係止ピン13の近傍に設けられている。なお、係止ピン13及びクランプ14の機能等については後述する。
Next, the configuration of the
As shown in FIG. 2 and FIGS. 3 to 5, the
The
The
The locking pins 13 are provided at two locations so as to protrude further from the tip of the
保持具1に着脱される保持金枠75は、その下端側に、係止ピン13と係合する係合溝751と、係止ピン13が挿入されて係合する係合孔752をそれぞれ2箇所に有する。詳細は後述するが、係合溝751は下部ノズル72を取り外すときに係止ピン13と係合し、係合孔752は下部ノズル72を取り付けるときに係止ピン13と係合する。すなわち、下部ノズル72を取り外すときは、係止ピン13の回転方向の位置にばらつきがあるため干渉しないように、係止ピン13は溝形状の係合溝751と係合させる。一方、下部ノズル72を取り付けるときは、作業者が保持金枠75の位置を微調整することができるため、係止ピン13は孔形状の係合孔752と係合させる。なお、図2には、取付け時の状態、すなわち係合孔752が係止ピン13と係合した状態を示している。
保持金枠75は下部ノズル72を保持した状態で、スリーブ金物74に対してバイヨネット機構によって着脱される。具体的にはバイヨネット機構として、保持金枠75はその外周面の3箇所に突起753を有し、スリーブ金物74は突起753を嵌め込むための螺旋状の溝741を3箇所に有する。
The holding
The retaining
次に、下部ノズル着脱装置Aの動作について説明する。最初に下部ノズルを取り外す際の取外し動作について説明する。
まず、スライディングノズル装置7に設けた撮影基準部であるマーカー(図示省略)に向けて、立体センサ23のレーザー照射機からレーザーを照射してカメラで撮影し画像処理することでスライディングノズル装置7の基準位置とのズレを計算してスライディングノズル装置7の3次元位置座標を補正する。このスライディングノズル装置7の補正位置を制御部21に入力することで、ロボットアーム2が動作して、ロボットアーム2に取り付けられた保持具1がスライディングノズル装置7に取り付けられた下部ノズル72の手前の所定位置まで移動する。なお、図1はこの所定位置まで移動する途中の状態を示している。
Next, there will be described an operation of the lower nozzle attaching/detaching device A. First, a detaching operation for detaching the lower nozzle will be described.
First, a laser is emitted from the laser irradiator of the
本実施形態において制御部21は、ロボットアーム2の動作制御により、保持具1を上述の所定位置まで移動させ、その所定位置で一旦停止させた後に、更に下部ノズル72に向けて前方向に移動させる。これにより、上述の2箇所の係止ピン13が2箇所の係合溝751とそれぞれ係合すると共に、芯棒12がノズル孔721に挿入される。図6A及び図6Bには、この状態を斜視図及び縦断面で示している。なお、図6A及び図6Bにおいてプレート収納金枠は省略している。以降の図面においても同様である。
In this embodiment, the
図6A及び図6Bの状態から制御部21は、ロボットアーム2の動作制御により、上述のバイヨネット機構が緩む方向(本実施形態では反時計回り方向)に保持具1を回転させると共に、下部ノズル72を取り外す方向、すなわち後方向へ保持具1を移動させる。このとき制御部21は、力センサ3が検出する上述の各反力、並びにロボットアーム2の後方向の動作量及び回転方向の動作量を監視しながらロボットアーム2の動作を制御する。具体的に本実施形態では、力センサ3が検出する上述の各反力がそれぞれ所定の設定値に達することなく、ロボットアーム2の後方向の動作量及び回転方向の動作量が所定のタイミングでそれぞれ所定の設定値に達した場合、下部ノズル72の取外しが正常に完了したと判断する。図7A及び図7Bには、この状態を斜視図及び縦断面で示している。すなわち、この状態ではバイヨネット機構が正常に解除されており、この段階で下部ノズル72の取外しが完了したと判断することができる。なお、本実施形態において、図6A及び図6Bの状態から図7A及び図7Bの状態までのロボットアーム2の後方向及び回転方向の動作量は、それぞれ3mm程度及び25度程度である。
6A and 6B, the
その後、制御部21は、ロボットアーム2の動作制御により保持具1を更に後方向へ移動させ、図8A及び図8Bに示しているように下部ノズル72を保持する保持金枠75をスリーブ金物74から取り外す。続いて制御部21は必要に応じて、ロボットアーム2を例えば上下方向に動作させることにより、下部ノズル72と下プレート71との間のシール目地を分離する。そして制御部21は、ロボットアーム2の動作制御により保持具1を更に後方向へ移動させる。これにより、図9A及び図9Bに示すように下部ノズル72をスリーブ金物74から抜き取ることができる。更に制御部21は、ロボットアーム2の動作制御により、保持具1を下方に傾ける。これにより下部ノズル72のみを落下させ、廃棄することができる。なお、保持具1を下方に傾ける際、上述のクランプ14を作動させることで、係止ピン13と係合溝751とを確実に係合させることができる。これにより、保持具1を下方に傾けたときに保持金枠75は落下することなく、下部ノズル72のみが確実に落下する。
Then, the
他方で制御部21は、下部ノズル72の取外しの際、力センサ3が検出する上述の各反力の少なくとも一方が所定のタイミングで所定の設定値に達した場合、取外し異常と判断してロボットアーム2の動作を停止する。すなわち、力センサ3が検出する各反力の少なくとも一方が所定の設定値に達したということは、上述のバイヨネット機構における摩擦抵抗が増大するなどして、バイヨネット機構が緩みにくくなっているということであり、そのまま取外し動作を継続すると、保持具1やロボットアーム2等の損傷を招くおそれがある。したがって本実施形態において制御部21は、力センサ3が検出する各反力の少なくとも一方が所定の設定値に達した場合、取外し異常と判断してロボットアーム2の動作を停止する。なお、制御部21はロボットアーム2の動作を停止した後、ロボットアーム2を一旦逆方向に動作させ、その後、上述の取外し動作を再開することもできる。
On the other hand, when at least one of the above-mentioned reaction forces detected by the
次に、下部ノズルを取り付ける際の取付け動作について説明する。
まず、ロボットアーム2の先端に取り付けた保持具1に、下部ノズル72を保持した保持金枠75を取り付ける。具体的に本実施形態では、保持金枠75の係合孔752に保持具1の係止ピン13を挿入することで、下部ノズル72を保持した保持金枠75を保持具1に取り付ける。図10A及び図10Bには、この状態を斜視図及び縦断面で示している。なお、上述の、保持具1に下部ノズル72を保持した保持金枠75を取り付ける作業は、作業者が行うことができる。またこのとき、下部ノズル72の上端面にシール目地材を塗布又は設置することができる。
Next, the mounting operation for mounting the lower nozzle will be described.
First, the holding
続いて、上述の取外し動作のときと同様に、スライディングノズル装置7に設けた撮影基準部であるマーカー(図示省略)に向けて、立体センサ23のレーザー照射機からレーザーを照射してカメラで撮影し画像処理することでスライディングノズル装置7の基準位置とのズレを計算してスライディングノズル装置7の3次元位置座標を補正する。このスライディングノズル装置7の補正位置を制御部21に入力することで、ロボットアーム2が動作して、保持具1に取り付けられた保持金枠75及び下部ノズルが、スライディングノズル装置7に固定されているスリーブ金物74の手前の所定位置まで移動する。
Next, just as in the removal operation described above, a laser is emitted from the laser irradiator of the
本実施形態において制御部21は、ロボットアーム2の動作制御により、保持具1を上述の所定位置まで移動させ、その所定位置で一旦停止させた後に、更にスリーブ金物74に向けて前方向に移動させる。これにより、下部ノズル72の上端面(シール目地材)が下プレート71に接触すると共に保持金枠75の突起753がスリーブ金物74の溝741に嵌まり込み、バイヨネット機構が構成可能な位置となる。図11A及び図11Bには、この状態を斜視図及び縦断面で示している。
In this embodiment, the
この状態から制御部21は、ロボットアーム2の動作制御により、上述のバイヨネット機構が締まる方向(本実施形態では時計回り方向)に保持具1を回転させると共に、下部ノズル72を取り付ける方向、すなわち前方向へ保持具1を移動させる。このとき制御部21は、力センサ3が検出する上述の各反力、並びにロボットアーム2の前方向の動作量及び回転方向の動作量を監視しながらロボットアーム2の動作を制御する。具体的に本実施形態では、力センサ3が検出する上述の各反力が所定のタイミングでそれぞれの所定の設定値に達し、かつロボットアーム2の前方向の動作量及び回転方向の動作量がそれぞれ所定の設定値に達した場合、下部ノズル72の取付けが正常に完了したと判断する。図12A及び図12Bには、この状態を斜視図及び縦断面で示している。
From this state, the
その後、制御部21はロボットアーム2の動作制御により、保持具1を後方向に移動させる。これにより、保持具1の係止ピン13が保持金枠75の係合孔752から外れ、保持具1のみが後方向に移動する。
Then, the
他方で制御部21は、下部ノズル72の取付けの際、力センサ3が検出する上述の各反力の少なくとも一方が所定のタイミングで所定の設定値に達した時点で、ロボットアームの前方向の動作量及び回転方向の動作量の少なくとも一方が所定の設定値に達していない場合、取付け異常と判断してロボットアーム2の動作を停止する。すなわち、この場合は、上述のバイヨネット機構における摩擦抵抗が増大するなどしてバイヨネット機構が締まりにくくなっているということであり、そのまま取付け動作を継続すると、保持具1やロボットアーム2等の損傷を招くおそれがある。したがって本実施形態において制御部21は、力センサ3が検出する各反力の少なくとも一方が所定の設定値に達した時点で、ロボットアームの前方向の動作量及び回転方向の動作量の少なくとも一方が所定の設定値に達していない場合、取付け異常と判断してロボットアーム2の動作を停止する。なお、制御部21はロボットアーム2の動作を停止した後、ロボットアーム2を一旦逆方向に動作させ、その後、上述の取付け動作を再開することもできる。
On the other hand, when at least one of the reaction forces detected by the
以上の通り本実施形態において制御部21は、力センサ3が検出する上述の各反力、並びにロボットアーム2の前後方向の動作量及び回転方向の動作量を監視しながらロボットアーム2の動作を制御することにより下部ノズルの着脱を実行する。これにより、下部ノズル72の着脱を確実に行うことができる。
As described above, in this embodiment, the
A 下部ノズル着脱装置
1 保持具
11 基体
111 空間
12 芯棒
13 係止ピン
14 クランプ
2 ロボットアーム
21 制御部
22 架台
23 立体センサ
3 力センサ
4 取鍋
41 取鍋の底
5 床
6 取鍋受部
7 スライディングノズル装置
71 下プレート
72 下部ノズル
721 ノズル孔
73 プレート収納金枠
74 スリーブ金物
741 溝
75 保持金枠
751 係合溝
752 係合孔
753 突起
A Lower nozzle attachment/
Claims (5)
前記下部ノズルを保持する保持金枠に着脱可能な保持具、この保持具を先端に有するロボットアーム、このロボットアームの動作に伴い前記保持具が前記保持金枠より受ける前後方向の反力及び回転方向の反力を検出する力センサ、並びに前記ロボットアームの動作を監視し制御する制御部を含み、
前記制御部は、前記力センサが検出する各反力、並びに前記ロボットアームの前後方向の動作量及び回転方向の動作量を監視しながら当該ロボットアームの動作を制御することにより下部ノズルの着脱を実行する、下部ノズル着脱装置。 A lower nozzle attachment/detachment device for attaching and detaching a refractory lower nozzle to and from a refractory lower plate attached to a sliding nozzle device,
the robot arm includes a holder that is detachable from a holding frame that holds the lower nozzle, a robot arm having the holder at its tip, a force sensor that detects a reaction force in a front-rear direction and a reaction force in a rotational direction that the holder receives from the holding frame as the robot arm moves, and a control unit that monitors and controls the movement of the robot arm,
The control unit controls the movement of the robot arm while monitoring the reaction forces detected by the force sensors, as well as the forward/backward movement and rotational movement of the robot arm, thereby performing attachment and detachment of the lower nozzle.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP24819208.0A EP4714573A1 (en) | 2023-06-05 | 2024-05-28 | Lower nozzle attachment/detachment device |
| CN202480022258.3A CN120897810A (en) | 2023-06-05 | 2024-05-28 | Lower nozzle mounting and dismounting device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023-092600 | 2023-06-05 | ||
| JP2023092600A JP2024174660A (en) | 2023-06-05 | 2023-06-05 | Lower nozzle attachment/detachment device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024252976A1 true WO2024252976A1 (en) | 2024-12-12 |
Family
ID=93795921
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/019481 Ceased WO2024252976A1 (en) | 2023-06-05 | 2024-05-28 | Lower nozzle attachment/detachment device |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4714573A1 (en) |
| JP (1) | JP2024174660A (en) |
| CN (1) | CN120897810A (en) |
| WO (1) | WO2024252976A1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06254670A (en) | 1993-03-08 | 1994-09-13 | Nippon Steel Corp | Device for attaching and detaching the metal frame for fixing the nozzle |
| JPH0985429A (en) * | 1995-09-27 | 1997-03-31 | Toshiba Ceramics Co Ltd | Refractory changer |
| JP2016525452A (en) | 2013-07-11 | 2016-08-25 | リフラクトリー・インテレクチュアル・プロパティー・ゲーエムベーハー・ウント・コンパニ・カーゲー | Method and apparatus for automatically replacing a dispensing nozzle on a sliding closure of a metallurgical vessel |
| WO2020179774A1 (en) * | 2019-03-04 | 2020-09-10 | 黒崎播磨株式会社 | Plate holding device, plate removing device, plate mounting device, and plate attaching/detaching device |
| WO2020196270A1 (en) * | 2019-03-27 | 2020-10-01 | 黒崎播磨株式会社 | Device for opening/closing |
-
2023
- 2023-06-05 JP JP2023092600A patent/JP2024174660A/en active Pending
-
2024
- 2024-05-28 WO PCT/JP2024/019481 patent/WO2024252976A1/en not_active Ceased
- 2024-05-28 CN CN202480022258.3A patent/CN120897810A/en active Pending
- 2024-05-28 EP EP24819208.0A patent/EP4714573A1/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06254670A (en) | 1993-03-08 | 1994-09-13 | Nippon Steel Corp | Device for attaching and detaching the metal frame for fixing the nozzle |
| JPH0985429A (en) * | 1995-09-27 | 1997-03-31 | Toshiba Ceramics Co Ltd | Refractory changer |
| JP2016525452A (en) | 2013-07-11 | 2016-08-25 | リフラクトリー・インテレクチュアル・プロパティー・ゲーエムベーハー・ウント・コンパニ・カーゲー | Method and apparatus for automatically replacing a dispensing nozzle on a sliding closure of a metallurgical vessel |
| WO2020179774A1 (en) * | 2019-03-04 | 2020-09-10 | 黒崎播磨株式会社 | Plate holding device, plate removing device, plate mounting device, and plate attaching/detaching device |
| WO2020196270A1 (en) * | 2019-03-27 | 2020-10-01 | 黒崎播磨株式会社 | Device for opening/closing |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024174660A (en) | 2024-12-17 |
| TW202506296A (en) | 2025-02-16 |
| CN120897810A (en) | 2025-11-04 |
| EP4714573A1 (en) | 2026-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7217229B2 (en) | Apparatus for automatically changing a robot tool tip member | |
| JP7014733B2 (en) | Robot-assisted grinding equipment | |
| JP5369638B2 (en) | Robot equipment | |
| JP5856212B2 (en) | Jig and processing system for supporting a workpiece rotatably with respect to a tool of a machine tool | |
| JP2020044617A (en) | Processing system | |
| JP5492067B2 (en) | Contact tip changer | |
| CN113165059B (en) | Board holding device, board removing device, board mounting device and board mounting and dismounting device | |
| EP3950238B1 (en) | Device for opening/closing | |
| WO2019142709A1 (en) | Attachment structure of robot end effector, and robot end effector | |
| JP2011000596A (en) | Welding nozzle cleaner | |
| WO2024252976A1 (en) | Lower nozzle attachment/detachment device | |
| JP7791077B2 (en) | Apparatus and method for automatically removing a grinding disc | |
| JP7088808B2 (en) | Tool changer and machine tools | |
| TWI915833B (en) | Lower nozzle loading and unloading device | |
| JP7219637B2 (en) | Plate removal device and plate attachment device | |
| JP5176331B2 (en) | Imaging apparatus and spot welding robot system | |
| CA3291675A1 (en) | Lower nozzle attachment/detachment device | |
| JP7169229B2 (en) | plate mounting device | |
| JP7219677B2 (en) | Plate attaching/detaching device | |
| JP2022021162A (en) | Automatic pipe expansion device | |
| JPH06262357A (en) | Contact tip exchange device for welding torch | |
| JP7643975B2 (en) | Holder unit and machine tool | |
| WO2019077726A1 (en) | Welding device | |
| JP7259645B2 (en) | Numerical controller and control method | |
| JP4126413B2 (en) | Mold changer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24819208 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202480022258.3 Country of ref document: CN |
|
| WWP | Wipo information: published in national office |
Ref document number: 202480022258.3 Country of ref document: CN |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112025026305 Country of ref document: BR |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024819208 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202517133061 Country of ref document: IN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWP | Wipo information: published in national office |
Ref document number: 202517133061 Country of ref document: IN |
|
| ENP | Entry into the national phase |
Ref document number: 2024819208 Country of ref document: EP Effective date: 20251217 |
|
| ENP | Entry into the national phase |
Ref document number: 2024819208 Country of ref document: EP Effective date: 20251217 |
|
| ENP | Entry into the national phase |
Ref document number: 2024819208 Country of ref document: EP Effective date: 20251217 |
|
| ENP | Entry into the national phase |
Ref document number: 2024819208 Country of ref document: EP Effective date: 20251217 |