CN110901896A - 升、推一体动力装置及其在飞行器上的应用方法 - Google Patents
升、推一体动力装置及其在飞行器上的应用方法 Download PDFInfo
- Publication number
- CN110901896A CN110901896A CN201811076919.3A CN201811076919A CN110901896A CN 110901896 A CN110901896 A CN 110901896A CN 201811076919 A CN201811076919 A CN 201811076919A CN 110901896 A CN110901896 A CN 110901896A
- Authority
- CN
- China
- Prior art keywords
- section
- lifting
- aircraft
- panel
- air
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 27
- 230000006835 compression Effects 0.000 claims abstract description 15
- 238000007906 compression Methods 0.000 claims abstract description 15
- 230000001133 acceleration Effects 0.000 claims abstract description 14
- 239000007921 spray Substances 0.000 claims abstract description 7
- 230000005484 gravity Effects 0.000 claims description 39
- 230000008602 contraction Effects 0.000 claims description 11
- 238000004891 communication Methods 0.000 claims description 8
- 241000264877 Hippospongia communis Species 0.000 claims description 4
- 238000013016 damping Methods 0.000 claims description 4
- 230000001276 controlling effect Effects 0.000 description 9
- 101100436435 Mus musculus Atp5me gene Proteins 0.000 description 5
- 238000007664 blowing Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 238000002347 injection Methods 0.000 description 5
- 239000007924 injection Substances 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 230000001105 regulatory effect Effects 0.000 description 5
- 230000002441 reversible effect Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 3
- 230000009286 beneficial effect Effects 0.000 description 2
- 230000033228 biological regulation Effects 0.000 description 2
- 239000012530 fluid Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 230000017525 heat dissipation Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C15/00—Attitude, flight direction, or altitude control by jet reaction
- B64C15/02—Attitude, flight direction, or altitude control by jet reaction the jets being propulsion jets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U50/00—Propulsion; Power supply
- B64U50/10—Propulsion
- B64U50/13—Propulsion using external fans or propellers
- B64U50/14—Propulsion using external fans or propellers ducted or shrouded
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Aerodynamic Tests, Hydrodynamic Tests, Wind Tunnels, And Water Tanks (AREA)
Abstract
升、推一体动力装置,由压气与整流段、气流加速段、升力段、姿态控制面板段或导气喷管、导气管、分布式传感器、电子控制模块及其可在线升级控制软件组成,由电池提供直接能源。一个或多个该动力装置的组合在飞行器上对称布置的应用方法,实现飞行器系统在受动力装置的合力和合力矩平衡或不平衡态下都可控运行。
Description
技术领域
本发明涉及一种动力装置及其在飞行器上的应用方法,尤其是一种升力、推力一体化生成的新型动力装置,以及该动力装置在新型短距或垂直起降飞行器上的应用方法。
背景技术
现有固定翼飞机一般通过喷气式发动机或者螺旋桨发动机提供动力,这些传统动力装置一般只能直接提供水平向前的推力,无法或者不能很好地实现飞机短距或垂直起降,其巨大的机翼结构亦不利于自身在小空间上的放置和运行。现有的可以垂直起降的航空器中,直升飞机因其外露且高速运转的旋翼结构而不够安全,且其结构较复杂,操控较困难; F35B垂直起降飞机结构复杂,且其升力风扇在巡航时为死重,效率较低;尾座式飞行器和多旋翼飞行器都有低效和不够安全的问题,且都难以做到大载重和长续航;固定翼-多旋翼复合飞行器在垂直起飞时有效载重低,在巡航时旋翼机构成为死重,整体局限仍然较大;MV22类型的倾转旋翼机由于倾转机构复杂,易发生事故,可靠性较低;历史上美国的YC-14及其他采用动力增升技术的飞机,因受制于常规的固定翼布局设计和动力增升只提供部分升力,无法做到垂直起降,虽然具有短距起降的能力,但同时带来了气动结构和机体材料耐热性方面的问题,难以大规模应用。
发明内容
为了改进现有航空动力装置及应用现有动力装置的飞行器的上述不足,本发明提供了升、推一体动力装置及其在飞行器上的应用方法。该动力装置由压气与整流段、气流加速段、升力段、姿态控制面板段或导气喷管、分布式传感器、电子控制模块及其可在线升级控制软件组成。以电池作为直接能源。
该动力装置在飞行器上的应用方法为:多个动力装置按照受合力和受合力矩可以保持平衡及对称式的布局方式,按照推力、升力及力矩差动输出的控制方法,依据分布式传感器的反馈数据或人工控制信号,由电子控制模块及其可在线升级控制软件调控,安全、可靠、高效地实现以该动力装置做为动力的新型飞行器的可控运行。
本发明解决其技术问题所采用的技术方案是:升、推一体动力装置及其在飞行器上的应用方法。该动力装置中,压气与整流段、气流加速段、升力段、姿态控制面板段无缝连接;由压气与整流段、气流加速段组成的高速气流发生装置产生、整流并加速的高速气流,以阻力最小的平直路径,流经升力段中的升力翼面板,以产生升力;还流经姿态控制面板段中的水平和垂直面板或部分气流通过导气喷管沿径向可控喷出,以产生姿态控制力矩;部分气流通过导气管吹向芯片、电池或其他易发热器件,以进行高效散热;最后高速气流直接作用于大气环境中,实现一体化生成升力、推力及力矩。
在升力翼面板和姿态控制面板的上下垂直投影与外界大气环境相连通的条件下,由一个或多个压气与整流段,一个或多个气流加速段,一个或多个升力段,零个、一个或多个姿态控制面板段或导气喷管,多个分布式传感器,多个电子控制模块及其可在线升级控制软件,一个或多个导气管,一块或多块电池组成。依据分布式传感器的反馈数据或人工控制信号,由电子控制模块及其可在线升级控制软件调控力和力矩的输出。以电池作为直接能源。
外界大气环境中的空气在高速气流发生装置出口吹气或入口吸气或二者共同制造的压强差的作用下,经过整流后在升力段产生平顺、规整、高速的气流,这些高速气流流经升力翼面板(升力翼面板须有翼型或攻角)或仅流经升力翼面板上表面(升力翼面板与升力段下壁面重合,此时升力段下壁面须为矩形面),使升力翼面板上表面气流流速大于其下表面气流流速,依据伯努利原理,升力翼面板上表面静压小于下表面静压,基于此压强差,将在升力翼面板上产生垂直向上的升力。
该动力装置中升力翼面板产生的升力的控制方法为:依据升力公式F=Cy×1/2×ρ×v2×S(F为升力,Cy为升力系数,ρ为空气密度,v为来流速度,S为翼面积),可通过转动机构控制升力翼面板的仰角大小(在其失速范围内)来控制升力系数Cy的大小,或通过电子调速器控制压气与整流段中电动风扇的转速来控制流经升力翼面板的气流速度v的大小,或通过机械机构控制升力翼面板有效升力面积S的大小。
高速气流流出该动力装置后,直接作用于外界大气环境,依据牛顿定律,该动力装置获得相反方向的推力。
该动力装置产生的推力的控制方法为:控制压气与整流段中电动风扇的转速来控制动力装置出口喷气速度,以控制产生的推力的大小;控制压气与整流段中电动风扇的转向来控制动力装置喷气方向,以控制产生的推力的方向。
该动力装置产生的力矩的控制方法为:电子控制模块及其可在线升级控制软件依据分布式传感器的实时反馈数据或人工控制信号,通过电子调速器差动控制压气与整流段中电动风扇的转速或转向,使所有电动风扇转动合力矩不平衡;或通过控制升力段中的升力翼面板以其中心轴线为转动轴作顺、逆时针转动,使垂直于升力翼面板的升力产生偏航的分量;或通过舵机调节姿态控制面板段中的水平面板和垂直面板对高速气流的偏转,或控制一个或一组导气喷管在径向的喷气。
多个该动力装置构成的动力单元组在飞行器上的应用方法为:以外挂或与机身融合的方式,为飞行器垂直起降飞行和飞行姿态控制提供推力、升力和姿态控制力矩,并且动力单元组输出的非零推力的合力可以为零、动力单元组输出的非零升力与飞行器重力的合力可以为零、动力单元组输出的非零力矩的合力矩可以为零,动力单元组以穿过飞行器系统重心的中轴线为对称轴对称布置,通过控制动力装置在飞行器系统上产生的合力和合力矩的平衡或不平衡实现飞行器可控运行。
对飞行器飞行状态的控制方法为:通过控制动力单元组的合升力与飞行器系统重力的合力来控制飞行器系统的上升或下降;通过控制动力单元组在前进方向和后退方向的合推力来控制飞行器系统的前进或后退;通过控制动力单元组在穿过飞行器系统重心的中轴线两侧不平衡的推力所产生的转向力矩或不平衡的升力在飞行器系统重心所产生的偏航力矩来实现飞行器系统的姿态控制,或通过控制动力单元组中电动风扇的转速、升力翼面的转动、姿态控制面板的偏转或导气喷管不同方向喷气中的一种或多种控制方式在飞行器重心产生的不平衡合力矩来实现对飞行器的姿态控制。
每个动力单元的电子控制模块间的电气连接方法为:每个动力单元的电子控制模块的数据线之间通过数据总线相互连接,相互通信;控制线之间通过控制总线相互连接,相互通信。实现传感器数据共享,并互为备份,互为主从节点。任一动力单元的电子控制模块可以作为主节点,依据自身的和汇总至其他从节点的分布式传感器的实时反馈数据或接收的人工控制信号,通过控制总线控制其他从节点的有序运行,当前主节点失效后,随机分配一个正常运行的从节点作为主节点。
基于该新型飞行器的上述设计,可以进一步优化其安全性和飞行效率:对其机身两侧部位加装常规固定式机翼或可伸缩可折叠式机翼,以进一步增强飞行系统巡航时的飞行效率及滑翔能力;在其机身顶部加装降落伞包,在发生极端故障时可以自动或手动打开,作为最后一道安全保障措施;在其底部设置三个或四个用于地面行使的由电池驱动的可控车轮,使其具备地面驾驶的能力;在其机身底部两侧加装充气式浮筒,使其可以在水面上无动力漂浮。
本发明的有益效果是:升、推一体动力装置,由于其电动风扇置于动力装置内部,与外界隔离,防护性好;通过设置由收缩管和扩张管组成的气流加速段,利用拉瓦尔管加速流体的原理对流体进行充分的加速,效率高;由于升力翼面板只处于发动机内部经过整流的稳定、规整、可控的高速气流中,不受外界大气环境中复杂紊乱气流的影响,稳定性好;只要动力装置运行正常,高速气流不会出现与升力翼面板分离而导致失速的情形,可靠性好;由于完全应用了吹气增升技术,升力系数相比现有普通飞行器大大提高,进一步提高了运行效率。
以多个该动力装置的组合在飞行器上的应用方法,为飞行器系统提供了推力、升力及姿态控制力矩,可以实现短距起降或垂直起降飞行及飞行姿态控制。多个动力单元既相互独立,相互备份,又互联互通,互为主从,其中任何一个或一定数目内的多个动力单元发生硬件或软件故障,甚至完全失效,也不影响飞行器系统整体的正常运行,极大程度降低该新型飞行器出现严重安全事故的概率。由于应用该动力装置的新型飞行器不再必须外置任何机翼、螺旋桨、旋翼,既保障了接触安全性,又大大降低了飞行器系统对自身停放和起降场所面积和平整度的高要求,拥有了更好的适应性,还大大减小了飞行阻力,提高了飞行效率。在分布式传感器的实时反馈数据和电子控制模块及其可在线升级控制软件的配合下,可实现无人自动运行,智能化程度高,控制软件可在线升级,扩展性强。由于以电池作为直接能源,可用性、经济性和环保性好,利于大规模推广应用。
附图说明
下面结合附图和实施例对本发明进一步说明。
图1是高速气流发生装置结构示意图。
图2是后高速气流发生装置结构示意图。
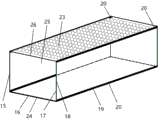
图3是升力段结构示意图。
图4是升力段结构中升力翼面板与下壁面融合的示意图。
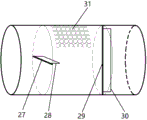
图5是姿态控制面板段结构示意图。
图6是动力装置典型实施方式结构示意图。
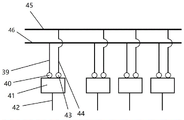
图7是动力装置组的电子控制模块之间电气连接示意图。
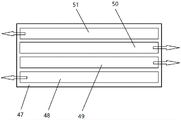
图8是动力装置组在新型飞行器上的一种典型应用方法示意图。
具体实施方式
如附图1所示,高速气流发生装置由压气与整流段和气流加速段依次无缝连接组成。压气与整流段结构为:压气与整流段为圆筒形或渐缩圆筒形管道,其进气口1和出口截面都为圆形。其结构按气流流动方向依次有:进气口1吸入空气,其入口位置有防护网罩;内部的风扇叶片2和电动机3组成电动风扇,电动机3与风扇叶片2的固定轴前端部位有锥形整流罩,电动风扇与管道外壳14构成一个涵道风扇或离心风机,一个或多个电动风扇用于压气,为装置内部空气的高速流动提供能量;位于管道外的电子调速器与电动风扇连接,用于执行电子控制模块的控制信号而实时调节电动风扇转速或转向;一个或多个蜂窝器4和一个或多个阻尼网5固定于管道内部并垂直于轴向依次排布,用于整流。
气流加速段结构为:气流加速段由内壁光滑的收缩管8和扩张管12无缝连接组成,构成一个拉瓦尔管。收缩管8的形状为拉瓦尔管的收缩部分,其入口7截面为圆形,出口9截面为圆形或椭圆形或半圆形或矩形,其出口9与入口7截面面积之比小于一,其入口7前有一段截面积相同的平直光滑管段6,起到均匀气流的作用;扩张管12的形状为拉瓦尔管的扩张部分,其出口13和入口11截面为圆形或椭圆形或半圆形或矩形,其出口13与入口11截面面积之比大于一;收缩管8的出口9与扩张管12的入口11无缝连接并构成拉瓦尔管的喉部10,可以在喉部10产生音速气流,从而在扩张管12中产生超音速气流。当其喉部10最大气流速度不足以达到音速时,气流加速段简化为仅由收缩管8构成。
如附图2所示,后高速气流发生装置结构为:由镜像气流加速段、镜像压气与整流段依次无缝连接组成,通过低压吸气在其内部产生高速气流。如附图1所示的通过高压吹气在其内部产生高速气流的也称为前高速气流发生装置。高速气流发生装置分为前高速气流发生装置和后高速气流发生装置,后高速气流发生装置与前高速气流发生装置在结构上呈镜像对称,通过调控电动风扇转向而改变动力装置中高速气流的流动方向,二者可以相互转化。
如附图3所示,升力段结构为:升力段为长方体形或圆筒形或半圆筒形或椭圆筒形管道,管道内腔25中有升力翼面板24,在升力翼面板24水平时的上、下、左、右方向所对应的管道壁上,分别有上壁面26、下壁面16、左壁面17、右壁面15,四个壁面分别通过四个刚性轴20连接。
升力段四个壁面都为镂空网状23或为完全开放式,使垂直于升力翼面板24上、下表面的投影都不受完全遮挡地与外界大气环境连通,防止升力段中系统内力相互平衡。
升力翼面板24为由航空材料制成的有翼型的耐压不透气板。升力翼面板24的长宽小于或等于内腔25中心轴截面或下壁面16的长宽,并将升力段内腔25空间分隔成两层,或者如附图4所示的升力翼面板24与下壁面16重合并融为一体。
升力翼面板24的左、右边缘19上分别设置有垂直于边缘的矩形或弧形不透气刚性挡板18,每块挡板18在结构上分别以左、右边缘19为对称轴上下对称,整体上呈“H”型,或者仅有“H”型的上半部分或下半部分,起到阻挡气流从升力翼面板24下表面高压区域流向其上表面低压区域的作用。左、右边缘19挡板18的尺寸可为以升力翼面板24下表面为中心轴截面的圆筒形的四分之一弧面或为该弧面的矩形弦面的尺寸,使整个升力翼面板可在升力段内腔25中转动。
圆环形内滑轨21固定在升力段内壁面上,升力翼面板24的左、右边缘19通过左、右转轴22固定在圆环形内滑轨21上,使升力翼面板24既可以通过转轴22绕内腔25径向做俯仰偏转,以在合理范围内改变升力翼面板24的仰角;同时又可以通过圆环形内滑轨21相对升力段内腔25绕轴向做顺逆时针的相对转动,或使升力段整体固定于动力装置外壳上的圆环形外滑轨上,可使升力翼面板24跟随升力段整体绕轴向做顺逆时针同步转动,使垂直于升力翼面板24的升力产生偏航的分量。
当简化设计,可取消圆环形内滑轨21和转轴22。当取消圆环形内滑轨21,升力翼面板24不能相对升力段内腔25绕其轴向做顺逆时针转动,此时升力翼面板24左、右边缘19直接固定在升力段左壁面17、右壁面15上,并且左、右边缘19挡板18分别与升力段左壁面17、右壁面15重合并融为一体;当取消转轴22,升力翼面板24不能在升力段内腔25绕径向做俯仰偏转。
当升力段为长方体形管道时,上壁面26、下壁面16、左壁面17、右壁面15都为矩形面,升力翼面板24可以位于上壁面26与下壁面16之间,也可以与下壁面16重合并融为一体;当升力段为圆筒形或椭圆筒形管道时,上壁面26、下壁面16、左壁面17、右壁面15为圆弧面或椭圆弧面,升力翼面板24位于其中心轴截面上;当升力段为半圆筒形管道时,上壁面26为弧形面,下壁面16为矩形面,左壁面17和右壁面15取消,升力翼面板24与下壁面16重合并融为一体。当升力翼面板24与下壁面16重合并融为一体时,升力翼面板24可退化为无翼型的平板且被固定,并取消圆环形内滑轨21和转轴22,即此时升力翼面板24既不能绕径向做俯仰偏转,也不能相对升力段内腔25绕轴向做顺逆时针转动,此时升力翼面板24左、右边缘19上的挡板18分别与升力段的左壁面17、右壁面15重合并融为一体,整个左壁面17和右壁面15成为挡板18,并且在此情形下,为了减弱外界环境气流对升力翼面板24下表面的扰动,可在升力翼面板24下表面的四个边缘上分别设置气流挡板和在这四个挡板下的镂空网状盖板。
如图五所示,姿态控制面板段结构为:姿态控制面板段为圆筒形或长方体形管道,内部空间与外界大气环境连通。内部空间设置有可独立偏转且互不干扰的耐压不透气水平面板28和垂直面板30。如有必要,可在姿态控制面板段气流入口处设置蜂窝器和阻尼网,起到平顺来流的作用。水平面板28位于固定于左、右壁面的径向中心横轴27上,可由电子控制模块及其可在线升级控制软件依据传感器反馈数据或人工控制信号,通过舵机控制水平面板28绕横轴27做上、下自由偏转,起到偏转高速气流而产生俯仰力矩的作用;垂直面板30位于固定于上、下壁面的垂直于径向的中心竖轴29上,可由电子控制模块及其可在线升级控制软件依据传感器反馈数据或人工控制信号,通过舵机控制垂直面板30绕竖轴29做左、右自由偏转,起到偏转高速气流而产生偏航力矩的作用。这些姿态控制面板偏转的气流作用于姿态控制面板段外壳壁面的部位都设置有镂空网孔31或为开放式,使被偏转的气流能不被完全阻隔地直接作用在外界大气环境中。姿态控制面板段分为姿态控制面板段前段和姿态控制面板段后段,二者在结构上呈镜像对称,随着动力装置中高速气流方向的改变,二者可以相互转化。
如图六所示,是该动力装置的典型实施方式的结构示意图。一种典型的实施方式为:高速气流可以以阻力最小的平直路径流动,依次经由无缝连接的姿态控制面板段前段32、前高速气流发生装置33、升力段34、后高速气流发生装置35、姿态控制面板段后段36,最后直接作用于大气环境中。依据分布式传感器的反馈数据或人工控制信号,由电子控制模块及其可在线升级控制软件调控。以电池作为直接能源。
基于上述典型实施方式,该动力装置实施方式可简化为:高速气流依次流过无缝连接的前高速气流发生装置33、升力段34、姿态控制面板段后段36,最后作用于大气环境中。或者高速气流依次流过无缝连接的升力段34、后高速气流发生装置35、姿态控制面板段后段36,最后直接作用于大气环境中。
基于上述简化的实施方式,该动力装置的实施方式可进一步精简为:高速气流依次流过无缝连接的一个前高速气流发生装置33和一个升力段34,最后直接作用于大气环境中;或者高速气流依次流过无缝连接的一个升力段34和一个后高速气流发生装置35,最后直接作用于大气环境中。其中高速气流发生装置的气流加速段只包含收缩管,不包含扩张管,升力段34中升力翼面板与升力段下壁面重合并融为一体。
基于上述几种实施方式,该动力装置的实施方式可扩展为:在满足由高速气流发生装置33或35产生并加速的高速气流以阻力最小的平直路径流过升力段34中的升力翼面板和姿态控制面板段32或36中的姿态控制面板,且升力翼面板和姿态控制面板的上、下垂直投影与外界大气环境之间不受完全遮挡的条件下,多个高速气流发生装置33或35、多个升力段34、多个姿态控制面板段32或36平直无缝连接,或以一组可控径向喷气的导气喷管37或38作为姿态调节的方式,一组导气管用于对发热器件吹气散热,最后直接作用于大气环境中。以一块或多块电池作为直接能源。
如图七所示,是该动力装置组的电子控制模块之间电气连接示意图。以四个相同的电子控制模块为例,它们之间的电气连接方法为:动力装置组中的每个动力单元的电子控制模块45的通信接口39通过通信线40连接在通信总线41上,实现所有动力单元之间的相互通信;每个动力单元的数据接口44通过数据线43连接在数据总线42上,任一动力单元的电子控制模块45可以通过数据总线42获取其他任一动力单元分布式传感器的实时数据,实现数据共享;任一动力单元的电子控制模块45可以作为主节点,主节点依据自身以及从数据总线42获得的传感器数据或接收的人工控制信号,经其处理器及可在线升级控制软件运算和处理后,向通信总线41发布系统级调控指令,每个从节点从通信总线41解析出对应于自身的调控指令后,通过控制线向自身的电子调速器或舵机等控制器件发出控制信号,从而对自身运行状态做出相应调控。主节点通过实时并行调控每个动力单元的运行状态,实现飞行器系统整体的有序和可控运行。当前主节点失效后,随机分配某个正常运行的从节点作为主节点。
如图八所示,是该动力装置组在新型飞行器上的一种典型应用方法示意图,与飞行器轴向平行的箭头方向表示动力单元的推力方向。以四个相同配置的动力单元的组合为例,在新型飞行器上的典型应用方法为:四个动力单元在新型飞行器机身47上的同一平面上,在穿过飞行器重心的中轴线两侧依次并排对称排列。每个动力单元长度与该新型飞行器系统的机身长度相同或相近,使得每个动力单元产生的升力在飞行器系统重心上只产生偏航力矩,不产生俯仰力矩。
飞行器系统受到的力和力矩有:飞行器系统重力、四个动力单元的推力、四个动力单元的升力、四个动力单元升力分别作用于飞行器系统重心的偏航力矩、四个动力单元推力分别作用于飞行器系统重心的转向力矩,或者动力单元中姿态控制面板偏转气流或导气喷管喷气而分别作用于飞行器系统重心上的偏航力矩和俯仰力矩,或者动力单元中升力段升力翼面板转动产生的分力作用于飞行器系统重心上的偏航力矩。设飞行器系统重力值为G,第一动力单元48推力值为T1、升力值为L1、推力在重心的转向力矩为Tfm1、升力在重心的偏航力矩为Lfm1;第二动力单元49推力值为T2、升力值为L2、推力在重心的转向力矩为Tfm2、升力在重心的偏航力矩为Lfm2;第三动力单元50推力值为T3、升力值为L3、推力在重心的转向力矩为Tfm3、升力在重心的偏航力矩为Lfm3;第四动力单元51推力值为T4、升力值为L4、推力在重心的转向力矩为Tfm4、升力在重心的偏航力矩为Lfm4。
其控制方法为:在飞行器系统的合力和合力矩平衡状态,四个动力单元的推力大小相等:T1=T2=T3=T4,第一动力单元48、第四动力单元51的推力方向相同,并与第二动力单元49、第三动力单元50的推力方向相反,四个推力的合力平衡:T1+T4=T2+T3;四个推力在飞行器系统重心上的合力矩也平衡:Tfm1+Tfm3=Tfm2+Tfm4;四个升力在飞行器系统重心上的合力矩也平衡:Lfm1+Lfm2=Lfm3+Lfm4;四个动力单元的合升力大小等于飞行器系统重力大小:G=L1+L2+L3+L4;第一动力单元48、第四动力单元51的电动风扇的转动合力矩与第二动力单元49、第三动力单元50的电动风扇的转动合力矩也平衡;具有姿态调节功能的翼面或导气喷管在飞行器系统重心上的作用力矩为零。飞行器系统此时保持空中悬停状态。
在飞行器系统水平向不平衡而垂直向平衡状态,分为前进或后退状态、最大加速度状态、最大减速状态、原地顺时针或逆时针转向状态、左偏航或右偏航状态。此时,四个动力单元的合升力大小始终等于飞行器系统重力大小。
在前进状态:T1+T4>T2+T3。在后退状态则相反:T1+T4<T2+T3。
在最大加速度状态,通过调节动力单元中电动风扇转向,使得四个动力单元同时提供与飞行器速度方向相同的正向推力;当电动风扇转向不可调时,可以增大提供正向推力的电动风扇的转速,同时减小提供反向推力电动风扇的转速直至停止。
在最大减速状态,通过调节动力单元中电动风扇转向,使得四个动力单元同时提供与飞行器速度方向相反的反向推力;当电动风扇转向不可调时,可以增大提供反向推力的电动风扇的转速,同时减小提供正向推力电动风扇的转速直至停止。
在原地顺时针转向状态,首先使推力的合力保持平衡:T1+T4=T2+T3;然后使升力在重心上的合力矩保持平衡:L1>L4,L3>L2,Lfm1+Lfm2=Lfm3+Lfm4;最后使推力在重心上的合力矩不平衡:T1>T4,T3>T2,Tfm1+Tfm3>Tfm2+Tfm4。还可以通过姿态控制面板中垂直面板偏转或导气喷管径向喷气产生原地转向力矩。原地逆时针转向状态控制方法以此类推。
在右偏航状态,首先使推力的合力保持平衡:T1+T4=T2+T3;然后使推力在重心上的合力矩保持平衡:T1>T4,T2<T3,Tfm1+Tfm3=Tfm2+Tfm4;最后使升力在重心上的合力矩不平衡:Lfm1+Lfm2>Lfm3+Lfm4。还可以通过转动一个或若干个动力单元升力段中的升力翼面板产生偏航的分力,从而在飞行器系统重心上产生偏航力矩。左偏航状态控制方法以此类推。
在飞行器系统水平向平衡而垂直向不平衡状态,即垂直上升或垂直下降状态。此时四个动力单元的推力的合力为零:T1+T4=T2+T3,四个动力单元推力在飞行器系统重心的合力矩为零:Tfm1+Tfm3=Tfm2+Tfm4,四个动力单元升力在飞行器系统重心的合力矩为零:Lfm1+Lfm2=Lfm3+Lfm4,具有姿态调节功能的面板或导气喷管在飞行器系统重心上的合力矩为零。
在垂直上升状态:L1+L2+L3+L4>G。垂直下降状态则相反:L1+L2+L3+L4<G。
上述不同状态的两种或两种以上的合状态,可以构成飞行器系统其他的飞行状态,比如顺时针螺旋上升状态为顺时针状态和垂直上升状态的合状态,其他的合状态依此类推。
上述四个动力单元在新型航空器上的应用方法可以等效替换为使用三个动力单元的组合的情形。也可以为四个动力单元的的另一种组合方式,即四个动力单元在新型飞行器上的同一平面上,分别位于平面的四个边角位置并对称分布,每个动力单元长度小于该新型飞行器系统机身长度的一半或不越过飞行器系统重心所在的横截面,使得每个动力单元产生的升力在飞行器系统重心上既产生偏航力矩,又产生俯仰力矩。还可以扩展为多于四个动力单元的组合的情形,比如四个动力单元中的每个动力单元可以被等效替换为多个动力单元。参照上述控制方法,使飞行器系统可以在受动力装置合力和合力矩平衡或不平衡态下都可控运行。
Claims (9)
1.升、推一体动力装置,其特征是:由压气与整流段、气流加速段、升力段、姿态控制面板段或导气喷管、分布式传感器、电子控制模块及其可在线升级控制软件组成。
2.根据权力要求1所述的动力装置,其特征是:压气与整流段、气流加速段、升力段、姿态控制面板段无缝连接;由压气与整流段、气流加速段组成的高速气流发生装置产生、整流并加速的高速气流,以阻力最小的平直路径,流经升力段中的升力翼面板及姿态控制面板段中的水平和垂直面板,或部分气流通过导气喷管可控喷出,部分气流通过导气管对芯片、电池或其他易发热器件进行吹气散热,最后直接作用于大气环境中;在升力翼面板和姿态控制翼面板的上下垂直投影与外界大气环境相连通的条件下,由一个或多个压气与整流段,一个或多个气流加速段,一个或多个升力段,零个、一个或多个姿态控制面板段,零个、一个或多个姿态控制导气喷管,多个分布式传感器,多个电子控制模块及其可在线升级控制软件组成;依据分布式传感器的反馈数据或人工控制信号,由电子控制模块及其可在线升级控制软件调控力和力矩的输出;以电池作为直接能源。
3.根据权力要求1所述的动力装置,其特征是:压气与整流段为圆筒形或渐缩圆筒形管道,内部的一个或多个电动风扇与管道外壳构成涵道风扇或离心风机,管道外有电子调速器,一个或多个蜂窝器和一个或多个阻尼网在管道内部垂直于轴向依次排布。
4.根据权力要求1所述的动力装置,其特征是:气流加速段由内壁光滑的收缩管和扩张管无缝连接组成,构成一个拉瓦尔管,或仅由收缩管构成。
5.根据权力要求1所述的动力装置,其特征是:升力段为具有上、下、左、右壁面的管道,壁面为镂空网状或开放式;升力段内腔中有升力翼面板,为有翼型的耐压不透气板,将升力段内腔空间分隔成上下两层,或与升力段下壁面重合并融为一体;升力翼面板的左、右边缘上分别设置有垂直于边缘的矩形或弧形不透气刚性挡板;当升力段内壁面上固定有圆环形内滑轨时,升力翼面板的左、右边缘通过左、右转轴固定在圆环形内滑轨上,否则直接固定在升力段内壁面上;升力翼面板可以通过转轴绕升力段径向做俯仰偏转,还可以通过圆环形内滑轨绕升力段轴向做顺逆时针的相对转动;垂直于升力翼面板上、下表面的投影都不受完全遮挡地与外界大气环境连通。
6.根据权力要求1所述的动力装置,其特征是:姿态控制面板段为内部空间与外界大气环境连通的管道;内部空间设置有可以独立运转且互不干扰的耐压不透气水平面板和垂直面板;水平面板和垂直面板位于远离动力装置或飞行器系统重心的位置;气流入口处设置蜂窝器和阻尼网。
7.该动力装置在航空器上的应用方法,其特征是:多个该动力装置以外挂或与机身融合的方式,为新型航空器垂直起降飞行和飞行姿态控制的提供推力、升力和姿态控制力矩。
8.根据权力要求7所述的应用方法,其特征是:以多个该动力装置的组合构成的动力单元组输出的非零推力的合力可以为零、输出的非零升力与飞行器重力的合力可以为零、输出的非零力矩的合力矩可以为零,动力单元组以穿过飞行器系统重心的中轴线为对称轴并排对称布置,可控制动力装置在飞行器中轴线两侧产生的合力和合力矩的平衡或不平衡。
9.根据权力要求7所述的应用方法,其特征是:每个动力装置电子控制模块的通信线通过通信总线相互连接,数据线通过数据总线相互连接,电子控制模块之间相互通讯、数据共享、互为主从节点,主节点实时并行向每个动力单元发出控制指令,每个动力单元的电子控制模块及其可在线升级控制软件根据此指令,通过控制线向控制器件发出控制信号。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811076919.3A CN110901896A (zh) | 2018-09-14 | 2018-09-14 | 升、推一体动力装置及其在飞行器上的应用方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811076919.3A CN110901896A (zh) | 2018-09-14 | 2018-09-14 | 升、推一体动力装置及其在飞行器上的应用方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN110901896A true CN110901896A (zh) | 2020-03-24 |
Family
ID=69812300
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811076919.3A Pending CN110901896A (zh) | 2018-09-14 | 2018-09-14 | 升、推一体动力装置及其在飞行器上的应用方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110901896A (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113200141A (zh) * | 2021-05-26 | 2021-08-03 | 西安理工大学 | 一种基于拉瓦管状等离子体吸气式增升装置 |
| CN119088085A (zh) * | 2024-08-21 | 2024-12-06 | 浙江大学 | 一种面向动力失效故障的无人机运动规划与容错控制方法 |
-
2018
- 2018-09-14 CN CN201811076919.3A patent/CN110901896A/zh active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113200141A (zh) * | 2021-05-26 | 2021-08-03 | 西安理工大学 | 一种基于拉瓦管状等离子体吸气式增升装置 |
| CN113200141B (zh) * | 2021-05-26 | 2022-05-31 | 西安理工大学 | 一种基于拉瓦管状等离子体吸气式增升装置 |
| CN119088085A (zh) * | 2024-08-21 | 2024-12-06 | 浙江大学 | 一种面向动力失效故障的无人机运动规划与容错控制方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12006030B2 (en) | Distributed electric propulsion modular wing aircraft with blown wing and extreme flaps for VTOL and/or STOL flight | |
| US10131426B2 (en) | Aircraft capable of vertical take-off | |
| US8733690B2 (en) | Lightweight vertical take-off and landing aircraft and flight control paradigm using thrust differentials | |
| JP5421503B2 (ja) | 自家用航空機 | |
| CN106428548B (zh) | 一种垂直起降无人飞行器 | |
| US9487286B2 (en) | Lift and propulsion device, and heavier-than-air aircraft provided with such a device | |
| EP2991897B1 (en) | Vertical takeoff and landing (vtol) air vehicle | |
| US10287011B2 (en) | Air vehicle | |
| US9085355B2 (en) | Vertical takeoff and landing aircraft | |
| US20040149857A1 (en) | Ducted fan vehicles particularly useful as vtol aircraft | |
| CN113753229B (zh) | 一种可折叠式固定翼四旋翼复合无人机及其控制方法 | |
| CN112334386B (zh) | 垂直起飞和着陆的个人飞行设备 | |
| RU141669U1 (ru) | Летательный аппарат вертикального взлета и посадки | |
| US11186367B2 (en) | Multicopter with improved failsafe operation | |
| EP4337527B1 (en) | Aircraft | |
| RU2635431C1 (ru) | Конвертоплан | |
| US20040164203A1 (en) | Vertical take-off and landing aircraft | |
| RU2700154C1 (ru) | Летательный аппарат вертикального взлета и посадки | |
| CN108791876B (zh) | 一种可以垂直起飞和降落的飞行器 | |
| CN213200096U (zh) | 一种涵道风扇无人飞行器 | |
| CN110901896A (zh) | 升、推一体动力装置及其在飞行器上的应用方法 | |
| WO2004031876A1 (en) | Flight control system for vtol aircraft | |
| CN114275156B (zh) | 一种基于涵道风扇的推力矢量无人飞行器 | |
| CN113104195B (zh) | 一种双涵道复合翼飞行器 | |
| CN113415416A (zh) | 一种飞行器及其控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20200324 |