CN112189227A - 地图信息生成系统以及作业援助系统 - Google Patents
地图信息生成系统以及作业援助系统 Download PDFInfo
- Publication number
- CN112189227A CN112189227A CN201980034851.9A CN201980034851A CN112189227A CN 112189227 A CN112189227 A CN 112189227A CN 201980034851 A CN201980034851 A CN 201980034851A CN 112189227 A CN112189227 A CN 112189227A
- Authority
- CN
- China
- Prior art keywords
- unit
- information
- map information
- work
- work vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
- G09B29/003—Maps
- G09B29/004—Map manufacture or repair; Tear or ink or water resistant maps; Long-life maps
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D41/00—Combines, i.e. harvesters or mowers combined with threshing devices
- A01D41/02—Self-propelled combines
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D69/00—Driving mechanisms or parts thereof for harvesters or mowers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Environmental Sciences (AREA)
- Automation & Control Theory (AREA)
- Educational Technology (AREA)
- Mathematical Physics (AREA)
- Educational Administration (AREA)
- Business, Economics & Management (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Guiding Agricultural Machines (AREA)
- Combines (AREA)
- Instructional Devices (AREA)
- Navigation (AREA)
- Lifting Devices For Agricultural Implements (AREA)
Abstract
地图信息生成系统获取:具有第一机体部以及支承于所述第一机体部的第一作业部的第一作业车辆在田地内的特定地点处的位置信息,基于所述特定地点处的所述第一机体部的姿势控制信息以及/或者所述第一作业部的姿势控制信息,而确定多个耕作层深度信息,生成:使得所述特定地点处的所述第一作业车辆的位置信息与所述多个耕作层深度信息建立关联的地图信息。
Description
技术领域
本发明涉及地图信息生成系统、以及利用该地图信息生成系统的作业援助系统。
背景技术
下述专利文献1中公开了如下技术:基于利用在作业车的车宽方向的中央设置的GPS装置每隔一定时间检测出的纬度经度信息以及高度信息而生成田地凹凸数据映射图(地图信息)。
现有技术文献
专利文献
专利文献1:日本特开2004-008187号公报
发明内容
在专利文献1中,利用GPS装置而获取作业车的车宽方向中央的高度,但并未检测从行进方向观察而作业车向哪一侧倾斜。因此,无法生成田地中对纬度经度信息进行了检测的地点的、详细的凹凸数据映射图。
田地有时由表层的表面以及位于表层下方的耕作层构成。作为表层的表面与耕作层的表面之间的距离的耕作层深度,由于对作物的生长、作业效率等造成影响,因此在田地作业中较为重要。然而,在专利文献1中,虽然能够获取凹凸数据,但却无法获取与耕作层的深度相关的信息。
因此,本发明的主要目的在于提供能够生成使得作业援助的质量得到提高的地图信息的地图信息生成系统、以及利用该地图信息生成系统的作业援助系统。
本发明的一个实施方式提供一种地图信息生成系统,该地图信息生成系统获取:具有第一机体部以及支承于所述第一机体部的第一作业部的第一作业车辆在田地内的特定地点处的位置信息,基于所述特定地点处的所述第一机体部的姿势控制信息以及/或者所述第一作业部的姿势控制信息,而确定多个耕作层深度信息,生成:使得所述特定地点处的所述第一作业车辆的位置信息与所述多个耕作层深度信息建立关联的地图信息。
根据该结构,在特定地点确定多个耕作层深度信息。因此,通过使特定地点处的第一作业车辆的位置信息与多个耕作层深度信息建立关联而能够生成具有特定地点处的详细的耕作层深度信息的地图信息。由此,能够实现作业援助的质量的提高。
在本发明的一个实施方式中,所述多个耕作层深度信息中包括:一对行驶部接地的部位处的耕作层深度信息,所述一对行驶部对所述第一机体部以及所述第一作业部进行支承且配置为在所述第一机体部的宽度方向上隔开规定间隔。
即,在第一机体部的宽度方向上的两处部位获取耕作层深度信息。因此,能够针对特定地点而生成具有详细的耕作层深度信息的地图信息。
在本发明的一个实施方式中,所述第一作业车辆的位置信息中包括高度信息。而且,对于所述地图信息,以能够互相识别的方式对所述特定地点处的所述多个耕作层深度信息进行显示,并且以能够识别的方式对所述特定地点处的高度信息以及与所述特定地点不同的其他地点处的高度信息进行显示。因此,通过参照地图信息而能够对特定地点处的耕作层的海拔(標高)与其他地点处的耕作层的海拔进行比较。
本发明的一个实施方式提供一种作业援助系统,其基于利用所述地图信息生成系统生成的所述地图信息,而对第二作业车辆进行援助,所述第二作业车辆具有:第二机体部,其在所述田地内行驶;以及第二作业部,其以相对于所述第二机体部能够升降的方式安装于所述第二机体部,且在所述田地内进行作业。而且,所述作业援助系统根据基于所述地图信息确定的通报对象位置以及所述第二作业车辆的位置信息,而在所述第二作业车辆到达所述通报对象位置之前进行规定的通报。
根据该结构,用户能够在第二作业车辆到达通报对象位置之前进行适合于通报对象位置的作业的准备。由此,能够实现作业援助的质量的提高。
在本发明的一个实施方式中,所述作业援助系统基于所述地图信息,以使得所述第二作业部的高度位置比基于所述地图信息而确定的耕作层深度更高的方式对所述第二作业部的升降范围进行限制。因此,能够抑制第二作业部相对于耕作层的接触。
在本发明的一个实施方式中,所述作业援助系统基于所述地图信息而确定禁止所述第二作业车辆行驶的行驶禁止区域,以不从所述行驶禁止区域通过的方式生成供所述第二作业车辆行驶的行驶路径。由此,能够避开行驶禁止区域,因此,能够使第二作业车辆顺场地行驶。其结果,能够实现作业援助的质量的提高。
在本发明的一个实施方式中,所述第二作业部构成为:设置于所述第二机体部的前部,且被朝向相对于所述田地的表面的高度呈恒定的目标位置进行升降控制。而且,所述作业援助系统基于所述地图信息而确定标准控制位置以及迟钝控制位置,使得所述第二作业部相对于所述第二作业车辆到达所述迟钝控制位置时的所述目标位置的追随性低于所述第二作业部相对于所述第二作业车辆到达所述标准控制位置时的所述目标位置的追随性。
在耕作层深度沿着第二作业车辆的行进方向而变化的情况下,第二作业部朝向相对于田地的表面的高度呈恒定的目标位置而升降。在将迟钝控制位置处的第二作业部相对于目标位置的追随性设为标准的情况下,第二作业部相对于第二机体部的高度位置的变化量变得过大,第二作业部有可能与田地的表面接触。因此,通过将第二作业部相对于第二作业车辆到达迟钝控制位置时的目标位置的追随性设为低于第二作业部相对于第二作业车辆到达标准控制位置时的目标位置的追随性,能够抑制在迟钝控制位置处第二作业部相对于第二机体部的高度位置的变化量。由此,能够抑制第二作业部相对于田地的表面的接触。
通过下面参照附图而叙述的实施方式的说明,使得本发明的上述的或者其他目的、特征以及效果变得明确。
附图说明
图1是示出本发明的一个实施方式所涉及的作业援助系统以及地图信息生成系统的结构的示意图。
图2是作为用于所述地图信息生成系统的第一作业车辆的联合收割机的侧视图。
图3是所述联合收割机的俯视图。
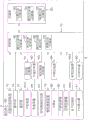
图4是示出所述联合收割机的电结构的框图。
图5是从行进方向观察在田地行驶过程中的所述联合收割机时的示意图。
图6示出了利用所述地图信息生成系统生成的地图信息的一例。
图7是作为所述第一作业车辆的拖拉机的侧视图。
图8是所述拖拉机的俯视图。
图9是示出所述拖拉机的电结构的框图。
图10是从行进方向观察在田地行驶过程中的所述拖拉机时的示意图。
图11是作为所述第一作业车辆的插秧机的侧视图。
图12是所述插秧机的俯视图。
图13是示出所述插秧机的电结构的框图。
图14是示出由所述地图信息确定的通报对象位置以及通报位置的示意图。
图15是示出所述作业援助系统的通报处理的一例的流程图。
图16是示出所述作业援助系统的升降范围限制处理的一例的流程图。
图17是示出利用所述作业援助系统生成的行驶路径的一例的示意图。
图18A是用于对第二作业车辆所具备的第二作业部的标准控制位置处的升降控制进行说明的示意图。
图18B是用于对所述第二作业部的迟钝控制位置处的升降控制进行说明的示意图。
图18C是用于对所述第二作业部的迟钝控制位置处的升降控制进行说明的示意图。
图19是示出所述作业援助系统的升降控制处理的一例的流程图。
具体实施方式
图1是示出本发明的一个实施方式所涉及的地图信息生成系统1以及作业援助系统2的结构的示意图。地图信息生成系统1是基于具备信息获取功能的第一作业车辆3获取到的信息而生成地图信息的系统。作业援助系统2是基于利用地图信息生成系统1生成的地图信息而对第二作业车辆4在田地中的各种作业进行援助的系统。
作业车辆3、4能够借助信息通信网5而与管理服务器6进行通信。另外,作业车辆3、4以及管理服务器6能够与显示用于作业援助的各种信息的无线通信终端7进行无线通信。
作为作业车辆3、4,例如采用联合收割机、拖拉机、插秧机等农业用作业车辆。作业车辆3、4可以是共通的作业车辆(例如均为拖拉机),也可以是互不相同的作业车辆(例如,一方为联合收割机,另一方为拖拉机)。
以下,对基于第一作业车辆3获取到的信息而生成地图信息、且将该地图信息灵活运用于各种作业援助的地图信息生成系统1以及作业援助系统2进行说明。此处,以第一作业车辆3是联合收割机的情况为例进行说明。
图2是作为第一作业车辆3的联合收割机8的侧视图。图3是联合收割机8的俯视图。
联合收割机8包括机架11、发动机12、脱粒装置13、谷粒箱14、搭乘驾驶部15、排出绞龙16、割取部17以及一对行驶部18。发动机12对联合收割机8的各部分供给动力。割取部17割取田地F中生长的穗杆。脱粒装置13对由割取部17割取的穗杆进行脱粒处理。谷粒箱14供脱粒后的谷粒贮存。排出绞龙16为了将谷粒箱14内的脱粒后的谷粒向联合收割机8的外部排出而对脱粒后的谷粒进行输送。
在搭乘驾驶部15具备:用于供用户搭乘的驾驶坐席15A;用于进行联合收割机8的转向操纵的方向盘15B;以及用于对联合收割机8进行操纵的各种操作部34(参照图4)。机架11是对发动机12、割取部17、排出绞龙16、脱粒装置13、谷粒箱14以及搭乘驾驶部15进行支承的框架。
使割取部17升降的升降缸43(参照图4)与割取部17连结。割取部17位于机架11的前端附近。割取部17包括:对田地F中生长的穗杆进行割取的割刀17A;以及将利用割刀17A割取的穗杆向脱粒装置13输送的输送路(未图示)。割取部17借助升降缸43而绕规定的旋转中心进行升降。
一对行驶部18配置为在联合收割机8的车宽方向WD上彼此隔开规定间隔。一对行驶部18对机架11、发动机12、割取部17、排出绞龙16、脱粒装置13、谷粒箱14以及搭乘驾驶部15进行支承。机架11、发动机12、排出绞龙16、脱粒装置13、谷粒箱14以及搭乘驾驶部15统称为机体部19。割取部17是支承于机体部19(第一机体部)的第一作业部的一例。车宽方向WD也是机体部19的宽度方向。
图2中仅示出了一对行驶部18中的一方,各行驶部18包括:履带框架20,其沿联合收割机8的前后方向延伸;多个转轮21,它们借助履带臂(未图示)而支承于履带框架20;驱动链轮22,来自发动机12的驱动力传递至该驱动链轮22;以及履带23,其绕挂于多个转轮21以及驱动链轮22。
在各行驶部18设置有车高缸41(参照图4)。各车高缸41使对应的履带框架20相对于机架11升降而使得对应的履带23在机体部19的高度方向HD(相对于车宽方向WD正交的方向)上伸缩。
一对车高缸41使一对履带框架20分别升降而对机体部19的高度及斜度进行调整。例如,即使当各履带23在田地F中接触的接地面的高度互不相同时,通过使车高缸41分别升降,也能够以从联合收割机8的行进方向观察而使得机体部19水平的方式对机体部19的斜度进行控制。
当联合收割机8在田地行驶时,履带23的下端下沉至位于比田地的表层的上表面(田地表面)更靠下方的位置的耕作层的高度。耕作层是指由比表层更硬的土形成的层。
图4是示出联合收割机8的电结构的框图。参照图4,联合收割机8具备用于对联合收割机8所具备的各部分的动作进行控制的控制部30。
位置信息获取部31与控制部30电连接。利用卫星信号接收用天线32接收到的定位信号输入至位置信息获取部31。卫星信号接收用天线32接收来自构成卫星定位系统(GNSS:Global Navigation Satellite System)的定位卫星的信号。
位置信息获取部31将联合收割机8(严格而言为卫星信号接收用天线32)的位置信息例如作为纬度/经度/高度信息而进行计算。卫星信号接收用天线32位于车宽方向WD的大致中央。位置信息获取部31例如每隔1秒而获取联合收割机8的位置信息。
通信部33与控制部30电连接。作为一例,通信部33可以由无线LAN路由器(Wi-Fi路由器)构成。操作部34与控制部30电连接。
用于对联合收割机8的各部分进行控制的多个控制器分别与控制部30电连接。多个控制器包括发动机控制器35、履带驱动机构控制器36、车高控制器37以及升降控制器38。
发动机控制器35与设置于发动机12的作为燃料喷射装置的共轨装置39电连接。共轨装置39对发动机12的各气缸喷射燃料。发动机控制器35对共轨装置39进行控制而控制发动机12的转速等。发动机控制器35还能够通过对共轨装置39进行控制而使燃料向发动机12的供给停止、使发动机12的驱动停止。
将来自发动机12的驱动力传递至一对驱动链轮22的履带驱动机构40与履带驱动机构控制器36电连接。履带驱动机构40能够分别对一对履带23进行驱动。通过分别对一对履带23进行驱动而能够使联合收割机8转弯。
一对车高缸41与车高控制器37电连结。与车高缸41关联地,用于检测对应的履带23的下端与设置于机体部19的基准位置之间的铅直方向上的距离的车高传感器42与控制部30电连接。车高传感器42例如是对车高缸41的气缸杆的位置进行检测的电位计。
升降缸43与升降控制器38电连接。与升降缸43关联地,用于对设置于机体部19的基准位置与割刀17A之间的铅直距离进行检测的割取高度传感器44与控制部30电连接。割取高度传感器44例如是对升降缸43的气缸杆的位置进行检测的电位计等。
升降控制器38基于割取高度传感器44的检测结果而对升降缸43进行控制。具体而言,升降控制器38将升降缸43控制为使得割取部17的割刀17A与田地F的田地表面FS相比以规定距离而位于上方。
惯性测量装置45与控制部30电连接。惯性测量装置45是能够确定联合收割机8的姿势(机架11的朝向)、加速度等的传感器单元。具体而言,惯性测量装置45具备针对彼此正交的第一轴、第二轴以及第三轴而分别安装有角速度传感器及加速度传感器的传感器组。
详细而言,惯性测量装置45具备:第一加速度传感器,其对第一轴方向的加速度进行检测;第二加速度传感器,其对第二轴方向的加速度进行检测;第三加速度传感器,其对第三轴方向的加速度进行检测;第一角速度传感器,其对绕所述第一轴的角速度进行检测;第二角速度传感器,其对绕所述第二轴的角速度进行检测;以及第三角速度传感器,其对绕所述第三轴的角速度进行检测。
绕第一轴、第二轴及第三轴的运动分别称为俯仰运动、摆首运动、旋转运动。
控制部30包括具备CPU以及存储器(ROM、RAM等)的微机。微机通过执行存储器(ROM)中存储的规定程序而作为多个功能处理部发挥功能。作为功能处理部,能举出耕作层距离获取部50、表层距离获取部51、耕作层深度确定部52以及地图信息生成部53。
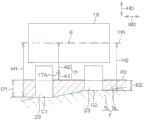
图5是从行进方向观察在田地F行驶过程中的联合收割机8时的示意图。当联合收割机8在田地F行驶时,履带23的下端下沉至位于比田地F的表层SL的上表面(田地表面)更靠下方的位置的耕作层TL的高度。耕作层TL是由比表层SL更硬的土形成的层。如图5所示,有时耕作层TL的高度在车宽方向WD的一侧和另一侧有所不同。即使在这种情况下,通过使一对履带23伸缩也能将机体部19的姿势维持为水平姿势。
耕作层距离获取部50基于各车高传感器42的检测结果而获取耕作层距离H1、H2。车宽方向WD的一侧的耕作层距离H1是从设定于机体部19的规定的基准位置S通过的水平面HS、与车宽方向WD的一侧的履带23与耕作层TL接触的接地点C1(接地面)之间的铅直方向上的距离。车宽方向WD的另一侧的耕作层距离H2是水平面HS、与车宽方向WD的另一侧的履带23与耕作层TL接触的接地点C2(接地面)之间的铅直方向上的距离。
表层距离获取部51基于割取高度传感器44的检测结果而获取表层距离h。详细而言,表层距离h相当于由割取高度传感器44检测出的田地表面FS至割刀17A的规定距离A1、与由用户设定的割刀17A与基准位置S之间的距离A2之和(h=A1+A2)。
耕作层深度确定部52基于耕作层距离H1、H2以及表层距离h而确定车宽方向WD的一侧的田地F的耕作层的深度D1(一侧耕作层深度)、以及车宽方向WD的另一侧的田地F的耕作层的深度D2(另一侧耕作层深度)。一侧耕作层深度D1相当于车宽方向WD的一侧的耕作层距离H1与表层距离h的差值(D1=H1-h)。另一侧耕作层深度D2相当于车宽方向WD的另一侧的耕作层距离H2与表层距离h的差值(D2=H2-h)。
若联合收割机8结束在田地F的整个区域的行驶,则利用位置信息获取部31获取田地F内的各特定地点处的位置信息,并利用耕作层深度确定部52确定田地F内的各特定地点处的多个耕作层深度信息(耕作层深度D1、D2)。
此外,利用耕作层深度确定部52获取的耕作层深度信息的采样间隔可以与利用位置信息获取部31获取的位置信息的采样间隔(例如1秒的间隔)不同。特定地点是获取耕作层深度信息和位置信息这双方的地点。
这样,耕作层深度确定部52基于特定地点处的机体部19的姿势控制信息(车高传感器42的检测结果以及惯性测量装置45的检测结果)、以及特定地点处的割取部17的升降控制信息(割取高度传感器44的检测结果),而确定耕作层深度D1、D2。
地图信息生成部53生成:使得利用位置信息获取部31获取的田地F内的各特定地点处的纬度经度信息、与利用耕作层深度确定部52确定的田地F内的各特定地点处的耕作层深度建立关联的地图信息。
图6示出了利用地图信息生成部53生成的地图信息的一例。在图6中,为了便于说明,由双点划线的箭头表示在田地F内行驶的联合收割机8的行进方向,地图信息中不包括该箭头。地图信息是:在田地F内针对包含获取到位置信息的各特定地点P在内的每个规定的区域R而对田地F进行划分、且根据在各特定地点P获取到的耕作层深度信息而对各区域R标注了识别信息(颜色或数值)的映射图。图6所示的地图信息示出了以颜色的浓淡作为识别信息的例子。
在联合收割机8的机体中心从特定地点P通过的情况下,以地点P为中心并与一对行驶部18各自的设置位置对应地在车宽方向WD上将各区域R分割为两部分。对于各区域R的车宽方向WD的一侧的部分R1而标注与一侧耕作层深度D1相应的识别信息,对于各区域R的车宽方向WD的另一侧的部分R2而标注与另一侧耕作层深度D2相应的识别信息。这样,对于地图信息,以能够互相识别的方式对特定地点P处的多个耕作层深度信息进行显示。对于图6所示的地图信息,耕作层深度越大的部分R1、R2设为越浓的颜色。
参照图4,存储部55与控制部30连接。存储部55由硬盘、非易失性存储器等存储设备构成。存储部55包括:对联合收割机8的位置信息进行存储的位置信息存储部56;对利用耕作层深度确定部52确定的田地F内的各特定地点P处的耕作层深度D1、D2进行存储的耕作层深度存储部57;以及对利用地图信息生成部53生成的地图信息进行存储的地图信息存储部58。
在第一作业车辆3是联合收割机8的情况下,基于特定地点P处的机体部19的姿势控制信息以及割取部17的升降控制信息而确定多个耕作层深度信息(耕作层深度D1、D2)。即,能够获取详细的耕作层深度。
因此,通过使特定地点P处的联合收割机8的纬度经度信息与多个耕作层深度信息对应而能够生成具有特定地点P处的详细的耕作层深度D1、D2的地图信息。由此,能够实现作业援助的质量的提高。
另外,多个耕作层深度信息中包括:配置为在车宽方向WD上隔开规定间隔的一对行驶部18接地的部位(接地点C1、C2)处的耕作层深度信息。即,在车宽方向WD上的两处部位获取耕作层深度信息。因此,能够针对特定地点P而生成具有详细的耕作层深度信息的地图信息。
另外,联合收割机8的一对行驶部18能够以使得机体部19维持水平姿势的方式在铅直方向上伸缩。因此,无论联合收割机8行驶的田地F的表面的凹凸形状如何,都能够准确地确定耕作层深度D1、D2。
对于地图信息,除了纬度经度信息以及耕作层深度D1、D2以外,还可以以能够识别的方式对利用位置信息获取部31获取的田地F内的各特定地点P处的高度信息进行显示。在该情况下,对于地图信息,与在各特定地点P获取的高度信息以及耕作层深度D1、D2相应地对各区域R标注识别信息(颜色或数值)。例如,可以由数值表示高度信息、且由颜色表示耕作层深度D1、D2。由此,能够对获取到位置信息的各特定地点P处的耕作层TL的海拔进行比较。
另外,田地F的耕作层TL的海拔可以用于海拔不同的多块田地F合并时的田地F之间的、田地表面FS的高度的调整。
接下来,以第一作业车辆3是拖拉机的情况为例进行说明。图7是作为第一作业车辆3的拖拉机9的侧视图。图8是拖拉机9的俯视图。
拖拉机9包括:在田地F内行驶的行驶机体60;以及装配于行驶机体60的作为作业机的耕耘机61。作为作业机,除了耕耘机61以外,例如还可以使用犁地机、施肥机、割草机、播种机等。
拖拉机9的行驶机体60具备:机体部62(第一机体部);以及一对行驶部63,它们对机体部62进行支承且设置为在车宽方向WD(机体部62的宽度方向)上彼此隔开间隔。各行驶部63包括前轮63A及后轮63B。行驶机体60能够利用发动机64的驱动力而行驶。耕耘机61等作业机是支承于第一机体部的第一作业部的一例。
行驶机体60的机体部62包括:用于供用户搭乘的驾驶坐席62A;以及用于进行行驶机体60的转向操纵的方向盘62B。在方向盘62B的附近设置有用于供用户进行各种操作的操作部78(参照图9)。
在机体部62的下部设置有拖拉机9的底盘65。该底盘65包括机体框架65A、变速器65B、前桥65C以及后桥65D等。
机体框架65A是拖拉机9的前部的支承部件,直接或借助防振部件等而对发动机64进行支承。变速器65B改变来自发动机64的动力并将其传递至前桥65C及后桥65D。前桥65C将从变速器65B输入的动力向各前轮63A传递。后桥65D将从变速器65B输入的动力向各后轮63B传递。
耕耘机61借助升降连杆机构66而与机体部62的后方连结。在机体部62的后部配置有:用于将发动机64的驱动力向耕耘机61输出的PTO轴67;以及用于对耕耘机61进行升降驱动的一对升降缸88(参照图9)。发动机64的驱动力经由变速器65B而传递至PTO轴67。
耕耘机61包括回旋机构69、从上方将回旋机构69覆盖的回旋机构罩70、以及从后方将回旋机构69覆盖的后罩71。PTO轴67的驱动力传递至回旋机构69而使其旋转。后罩71借助铰链而与回旋机构罩70连结。后罩71在图7中位于比田地F的表面(田地表面)更靠上方的位置,但是,在拖拉机9的行驶过程中,与田地表面接触并在比回旋机构69更靠行进方向后侧的位置对田地表面进行平整。
升降连杆机构66由包括左右一对上连杆66A以及左右一对下连杆66B的三点式连杆构造构成。一对上连杆66A设置为在车宽方向WD上彼此隔开间隔。同样地,一对下连杆66B设置为在车宽方向WD上彼此隔开间隔。
升降缸88(参照图9)与三点式连杆机构连结。通过使升降缸88进行伸缩动作而能够使耕耘机61的整体升降。
另外,在各下连杆66B设置有水平控制缸88A(参照图9)。水平控制缸88A例如为液压缸。通过使各水平控制缸88A分别进行伸缩动作而能够使耕耘机61从行进方向观察相对于机体部62而倾斜。在拖拉机9的行驶过程中,后罩71与回旋机构罩70以及回旋机构69的升降相应地绕铰链转动而维持与田地表面的接触。
图9是示出拖拉机9的电结构的框图。参照图9,拖拉机9具备控制部75,该控制部75用于对拖拉机9所具备的各部分的动作进行控制。
位置信息获取部76、通信部77、操作部78以及惯性测量装置79与控制部75电连接。位于车宽方向的大致中央的卫星信号接收用天线80接收到的定位信号输入至位置信息获取部76。位置信息获取部76、卫星信号接收用天线80、通信部77以及惯性测量装置79的结构分别与设置于联合收割机8的位置信息获取部31、卫星信号接收用天线32、通信部33以及惯性测量装置45的结构相同,因此省略它们的说明。
用于对拖拉机9的各部分进行控制的多个控制器分别与控制部75电连接。多个控制器包括发动机控制器81、车速控制器82、转向操纵控制器83、升降控制器84、姿势控制器84A以及PTO控制器85。发动机控制器81的结构与联合收割机8的发动机控制器35的结构相同,因此省略其说明。发动机控制器81与结构同联合收割机8的共轨装置39相同的共轨装置81A电连接。
车速控制器82通过对变速器65B(参照图7)进行控制而控制行驶机体60的车速(也是拖拉机9的车速)。在变速器65B设置有例如作为可动斜板式的液压式无级变速装置的变速装置86。
在自动行驶过程中,转向操纵控制器83对前轮63A的转向角进行控制。具体而言,在方向盘62B的旋转轴(转向轴)的中途部设置有转向操纵致动器87。转向操纵控制器83以使得方向盘62B的旋转角达到目标转向角的方式对转向操纵致动器87进行控制。由此,对行驶机体60的一对前轮63A的转向角进行控制。
升降缸88与升降控制器84电连接。与升降控制器84关联地,升降传感器89以及后罩传感器90与控制部75电连接。水平控制缸88A与姿势控制器84A电连接。
升降传感器89是用于对设置于机体部62的基准位置与回旋机构罩70的规定部(例如安装有后罩传感器90的部分)之间的铅直方向上的距离进行检测的传感器。升降传感器89例如是用于对升降缸88的位置进行检测的电位计等。
后罩传感器90是用于对回旋机构罩70的所述规定部与田地表面FS之间的铅直方向上的距离进行检测的传感器。后罩传感器90例如是对后罩71相对于与回旋机构69一体地升降的回旋机构罩70的转动角度进行检测的电位计等。
在拖拉机9的行驶过程中,后罩71在维持与田地表面FS的接触的状态下与回旋机构罩70以及回旋机构69的升降相应地绕铰链转动。由此,后罩传感器90检测出的转动角度发生变化。因此,一边利用后罩传感器90对后罩71的转动角度进行检测、一边使回旋机构69以及回旋机构罩70升降,由此能够将田地表面FS(后罩71中与田地表面FS接触的部分)与回旋机构69的下端部之间的铅直方向上的距离调整为所需的距离(用户设定的距离)。
升降控制器84基于升降传感器89以及后罩传感器90的检测结果而对升降缸88进行控制。具体而言,升降控制器84以使得回旋机构罩70的所述规定部(例如安装有后罩传感器90的部分)与田地表面FS相比以规定距离而位于上方的方式对升降缸88进行控制。
即使在从行进方向观察而行驶机体60倾斜的情况下,姿势控制器84A也通过对一对水平控制缸88A分别进行控制而使得耕耘机61的升降程度在车宽方向WD的一侧及另一侧发生变化,从而将耕耘机61的姿势维持为水平姿势。姿势控制器84A基于惯性测量装置79的检测结果而判定行驶机体60的姿势。
PTO控制器85对PTO轴67的旋转进行控制。具体而言,拖拉机9具备PTO离合器91,该PTO离合器91用于对向PTO轴67的动力的传递/切断进行切换。PTO控制器85能够基于从控制部75输入的控制信号而对PTO离合器91进行切换,并借助PTO轴67而对耕耘机61进行旋转驱动、或者使该旋转驱动停止。
控制部75包括具备CPU以及存储器(ROM、RAM等)的微机。微机通过执行存储器(ROM)中存储的规定程序而作为多个功能处理部发挥功能。作为功能处理部,能举出耕作层距离获取部96、表层距离获取部97、耕作层深度确定部98以及地图信息生成部99。
图10是从行进方向观察在田地F行驶过程中的拖拉机9时的示意图。如图10所示,当耕作层TL的高度在车宽方向WD的一侧及另一侧有所不同时,从行进方向观察,拖拉机9整体倾斜。此处,拖拉机9以车宽方向WD的一侧的行驶部63位于比车宽方向WD的另一侧的行驶部63更靠下方的位置的方式而倾斜。
耕作层距离获取部96基于惯性测量装置79的检测结果而获取耕作层距离H3、H4。车宽方向WD的一侧的耕作层距离H3是从设定于机体部62的规定的基准位置S通过的水平面HS、与车宽方向WD的一侧的行驶部63(例如后轮63B)与耕作层TL接触的接地点C3之间的铅直方向上的距离。车宽方向WD的另一侧的耕作层距离H4是水平面HS、与车宽方向WD的另一侧的行驶部63(例如后轮63B)与耕作层TL接触的接地点C4之间的铅直方向上的距离。
具体而言,耕作层距离获取部96基于惯性测量装置79的检测结果而获取机体部62相对于从拖拉机9的行进方向观察时的水平方向的倾斜角度θ。而且,耕作层距离获取部96基于倾斜角度θ、与预先设定的基准高度T及基准宽度W而对耕作层距离H3、H4进行计算。
基准高度T是拖拉机9的高度方向HD上的接地点C3、C4与倾斜面IS之间的距离。倾斜面IS是从基准位置S通过、且从拖拉机9的行进方向观察相对于水平面HS以倾斜角度θ而倾斜的面。基准宽度W是拖拉机9的车宽方向WD上的各行驶部63与基准位置S之间的距离。
在该情况下,车宽方向WD的一侧的耕作层距离H3是针对基准高度T与对基准宽度W乘以tanθ所得的距离之和再乘以cosθ所得的距离(H3=(T+W·tanθ)cosθ)。车宽方向WD的另一侧的耕作层距离H4是针对基准高度T与对基准宽度W乘以tanθ所得的距离之差再乘以cosθ所得的距离(H4=(T-W·tanθ)cosθ)。
表层距离获取部97基于升降传感器89以及后罩传感器90的检测结果而获取表层距离j。详细而言,表层距离j是田地表面FS与回旋机构罩70的规定部(例如安装有后罩传感器90的部分)之间的铅直距离B1、和该规定部与基准位置S之间的铅直距离B2之和(j=B1+B2)。
此外,如前所述,田地表面FS与回旋机构69的下端部之间的铅直方向上的距离由用户设定。因此,表层距离获取部97还能够根据基准位置S与回旋机构69的下端部之间的铅直方向上的距离、和田地表面FS与回旋机构69的下端部之间的铅直方向上的距离的差值而对表层距离j进行计算。
耕作层深度确定部98基于耕作层距离H3、H4以及表层距离j而确定车宽方向WD的一侧的田地F的耕作层TL的深度信息(一侧耕作层深度D3)、以及车宽方向WD的另一侧的田地F的耕作层TL的深度信息(另一侧耕作层深度D4)。一侧耕作层深度D3是车宽方向WD的一侧的耕作层距离H3与表层距离j的差值(D3=H3-j)。另一侧耕作层深度D4是车宽方向WD的另一侧的耕作层距离H4与表层距离j的差值(D4=H4-j)。
若拖拉机9结束在田地F的整个区域的行驶,则利用位置信息获取部76获取田地F内的各地点处的位置信息,并利用耕作层深度确定部98确定田地F内的各特定地点P处的耕作层深度D3、D4。
这样,耕作层深度确定部98基于特定地点P处的机体部62的姿势控制信息(惯性测量装置79的检测结果)、以及特定地点P处的耕耘机61的姿势控制信息(升降传感器89以及后罩传感器90的检测结果)而确定耕作层深度D3、D4。
地图信息生成部99生成:使得利用位置信息获取部76获取的田地F内的各特定地点P处的位置信息、与利用耕作层深度确定部98确定的田地F内的各特定地点P处的耕作层深度D3、D4建立关联的地图信息。生成的地图信息与将联合收割机8用作第一作业车辆3的情况相同,因此省略详细说明。
参照图9,存储部92与控制部75连接。存储部92由硬盘、非易失性存储器等存储设备构成。存储部92包括:对拖拉机9的位置信息进行存储的位置信息存储部93;对利用耕作层深度确定部98确定的田地F内的各特定地点P处的耕作层深度D3、D4进行存储的耕作层深度存储部94;以及对利用地图信息生成部99生成的地图信息进行存储的地图信息存储部95。
在第一作业车辆3是拖拉机9的情况下,能实现与第一作业车辆3是联合收割机8的情况相同的效果。
其中,拖拉机9的一对行驶部63无法伸缩。取而代之地,在拖拉机9中,耕作层距离获取部96构成为基于从所述信息获取用车辆的行进方向观察时的机体部62的倾斜角度θ、以及预先设定的基准高度T及基准宽度W而确定耕作层距离H3、H4。因此,即使在将构成为机体部62在耕作层深度在车宽方向WD上不同的地点行驶时倾斜的拖拉机9之类的车辆用作第一作业车辆3的情况下,也能够准确地确定耕作层深度D3、D4。
接下来,以图1所示的第一作业车辆3是插秧机10的情况为例进行说明。图11是作为第一作业车辆3的插秧机10的侧视图。图12是插秧机10的俯视图。
参照图11及图12,插秧机10一边在田地F内行驶、一边进行将秧苗栽植于田地F的地面的栽植作业。插秧机10具备:行驶机体100;以及栽植部101,其配置于行驶机体100的后方。
行驶机体100具备:机体部102(第一机体部);以及一对行驶部103,它们对机体部102进行支承且设置为在车宽方向WD(机体部102的宽度方向)上彼此隔开间隔。各行驶部103包括前轮103A及后轮103B。行驶机体100能够利用发动机104的驱动力而行驶。栽植部101是支承于第一机体部的第一作业部的一例。
行驶机体100的机体部102包括:用于供用户搭乘的驾驶坐席102A;以及用于对行驶机体100进行转向操纵的方向盘102B。在方向盘102B的附近设置有用于供用户进行各种操作的操作部123(参照图13)。
机体部102包括变速器105B、前桥105C以及后桥105D。变速器105B改变来自发动机104的动力并将其向前桥105C及后桥105D传递。前桥105C将从变速器27输入的动力向各前轮103A传递。后桥105D将从变速器105B输入的动力向各后轮103B传递。
栽植部101借助升降连杆机构106而与机体部102的后方连结。在机体部102的后部配置有:用于将发动机104的驱动力向栽植部101输出的PTO轴107;以及用于对栽植部101进行升降驱动的升降缸108。发动机104的驱动力经由变速器105B而向PTO轴107传递。
升降连杆机构106由包括左右一对上连杆106A以及左右一对下连杆106B的平行连杆构造构成。图11中仅示出了一对上连杆106A中的一方,一对上连杆106A设置为在车宽方向WD上彼此隔开间隔。同样地,图11中仅示出了一对下连杆106B中的一方,一对下连杆106B设置为在车宽方向WD上彼此隔开间隔。
升降缸108与平行连杆机构连结。通过使该升降缸108进行伸缩动作而使得栽植部101的整体升降。
栽植部101主要具备:多个(本实施方式中为4个)栽植单元110,它们将秧苗栽植于地面;栽植输入箱111,其对栽植单元110进行驱动;秧苗载台112,其供育苗垫(未图示)载置;以及多个浮子113,它们能够绕规定的旋转中心(浮子支承轴)旋转。
在栽植输入箱111连结有一对升降连杆机构106、且安装有多个栽植单元110。
各栽植单元110是具有栽植传动箱115、旋转箱116以及栽植臂117的回转式栽植装置。在各栽植单元110的栽植传动箱115分别安装有2个旋转箱116,在各旋转箱116分别安装有2个栽植臂117。
来自PTO轴107的驱动力输入至栽植输入箱111而对栽植单元110进行驱动。动力从栽植输入箱111向栽植传动箱115传递。利用来自栽植传动箱115的动力对旋转箱116进行旋转驱动。由此,栽植臂117的前端部描画出环状的旋转轨迹而工作。
在栽植臂117的前端部设置有栽植爪117A。当栽植臂117的前端部从上向下移动时,栽植爪117A从载置于秧苗载台112的育苗垫(未图示)耙取秧苗并将秧苗栽植于田地表面。
浮子113设置于栽植部101的下部。浮子113与田地表面接触而对栽植秧苗之前的田地表面进行平整。浮子113在图11中位于比田地F的表面(田地表面)更靠上方的位置,在插秧机10的行驶过程中,维持浮子113的下表面与田地表面FS的接触。
另外,回转缸108A(参照图13)的气缸杆(未图示)与对秧苗载台112进行支承的支承框架(未图示)连结。回转缸108A通过使气缸杆进行伸缩动作而使得支承框架绕规定的转动中心转动。由此,从行进方向观察,能够使栽植部101的整体相对于机体部102而倾斜。
图13是示出插秧机10的电结构的框图。参照图13,插秧机10具备控制部120,该控制部120用于对插秧机10所具备的各部分的动作进行控制。
位置信息获取部121、通信部122、操作部123、惯性测量装置124、以及多个控制器与控制部120电连接。位于车宽方向WD的大致中央的卫星信号接收用天线135接收到的定位信号向位置信息获取部121输入。
位置信息获取部121、卫星信号接收用天线135、通信部122以及惯性测量装置124的结构分别与设置于联合收割机8的位置信息获取部31、卫星信号接收用天线32、通信部33以及惯性测量装置45的结构相同,因此省略它们的说明。
多个控制器用于对插秧机10的各部分进行控制。多个控制器包括发动机控制器125、车速控制器126、转向操纵控制器127、升降控制器128、姿势控制器128A以及PTO控制器129。共轨装置130、变速装置131、转向操纵致动器132以及PTO离合器129A分别与发动机控制器125、车速控制器126、转向操纵控制器127以及PTO控制器129电连接。
发动机控制器125、车速控制器126、转向操纵控制器127、PTO控制器129、共轨装置130、变速装置131、转向操纵致动器132以及PTO离合器129A的结构分别与设置于拖拉机9的发动机控制器81、车速控制器82、转向操纵控制器83、PTO控制器85、共轨装置81A、变速装置86、转向操纵致动器87以及PTO离合器91的结构相同,因此省略它们的说明。
升降缸108与升降控制器128电连接。与升降控制器128关联地,升降传感器133以及浮子角度检测传感器134与控制部120电连接。回转缸108A与姿势控制器128A电连接。
升降传感器133是用于对设置于机体部102的基准位置与浮子113的旋转中心之间的铅直距离进行检测的传感器。升降传感器133例如是对升降缸108的位置进行检测的电位计等。
浮子角度检测传感器134是用于对浮子113的旋转中心与田地表面FS的铅直方向上的距离进行检测的传感器。浮子角度检测传感器134例如是对浮子113的转动角度进行检测的电位计等。
浮子113的旋转中心与栽植部101的升降相应地升降。在插秧机10的行驶过程中,田地表面FS与浮子113的旋转中心的铅直距离发生变化。因此,在插秧机10的行驶过程中,为了维持浮子113与田地表面FS的接触,浮子113与栽植部101的升降相应地绕旋转中心转动。由此,浮子角度检测传感器134检测出的转动角度发生变化。
因此,一边利用浮子角度检测传感器134检测浮子113的转动角度、一边使栽植部101升降,由此能够将田地表面FS(浮子113中与田地表面FS接触的部分)与栽植爪117A的旋转轨迹的下端(栽植位置)之间的铅直方向上的距离调整为所需的距离(用户设定的距离)。田地表面FS与栽植爪117A的旋转轨迹的下端之间的铅直方向上的距离称为栽植深度。
升降控制器128基于升降传感器133以及浮子角度检测传感器134的检测结果而对升降缸108进行控制。具体而言,升降控制器128以使得栽植爪117A相对于浮子113的高度位于规定位置的方式对升降缸108进行控制。
即使在从行进方向观察而行驶机体100倾斜的情况下,姿势控制器128A也通过使回转缸108A转动而将栽植部101的姿势维持为水平姿势。姿势控制器128A基于惯性测量装置124的检测结果而判定行驶机体100的姿势。
控制部120包括具备CPU以及存储器(ROM、RAM等)的微机。微机通过执行存储器(ROM)中存储的规定程序而作为多个功能处理部发挥功能。作为功能处理部,能举出耕作层距离获取部136、表层距离获取部137、耕作层深度确定部138以及地图信息生成部139。
耕作层距离获取部136、表层距离获取部137、耕作层深度确定部138以及地图信息生成部139分别发挥与设置于拖拉机9的控制部75的耕作层距离获取部96、表层距离获取部97、耕作层深度确定部98以及地图信息生成部99相同的功能。
其中,表层距离获取部137基于升降传感器133以及浮子角度检测传感器134而确定表层距离j。表层距离j是田地表面FS与浮子113的旋转中心之间的距离、和浮子113的旋转中心与基准位置S之间的距离之和。
如前所述,在插秧机10中,栽植深度(田地表面FS与栽植爪117A的旋转轨迹的下端之间的铅直距离)由用户设定。因此,表层距离获取部137可以根据基准位置S与栽植爪117A之间的铅直距离和栽植深度的差值而获取表层距离j。
在第一作业车辆3是插秧机10的情况下,耕作层深度确定部138基于特定地点P处的机体部102的姿势控制信息(惯性测量装置124的检测结果)、以及特定地点P处的栽植部101的姿势控制信息(升降传感器132的检测结果以及浮子角度检测传感器134的检测结果)而确定耕作层深度D3、D4。
存储部140与控制部120连接。存储部140由硬盘、非易失性存储器等存储设备构成。存储部140包括:对插秧机10的位置信息进行存储的位置信息存储部141;对利用耕作层深度确定部138确定的田地F内的各地点处的耕作层深度进行存储的耕作层深度存储部142;以及对利用地图信息生成部139生成的地图信息进行存储的地图信息存储部143。
在第一作业车辆3是插秧机10的情况下,能实现与第一作业车辆3是拖拉机9的情况相同的效果。
在地图信息生成系统1中,在第一作业车辆3是拖拉机9的情况下,升降控制器84基于惯性测量装置79的检测结果而将耕耘机61的姿势控制为水平,但也可以不利用惯性测量装置79的检测结果而是利用设置于耕耘机61的角速度传感器(水平控制装置)而将耕耘机61的姿势控制为水平。即使在第一作业车辆3是插秧机10的情况下也一样,可以利用设置于栽植部101的角速度传感器(水平控制装置)而将栽植部101的姿势控制为水平。
利用地图信息生成系统1生成的地图信息例如用于直至在获取到地图信息的田地接下来进行农作业为止而进行的田地改善作业、施肥培育管理援助。作为田地改善作业的一例,能举出对田地中耕作层深度较大的部分投入碎石等土壤改良材料的作业。施肥培育管理援助能举出针对田地中耕作层深度较大的部分而减少肥料的作业。通过对耕作层深度较大的部分减少肥料而能够抑制倒伏。
另外,利用地图信息生成系统1生成的地图信息用于以下说明的作业援助系统2的作业援助。作为作业援助系统2的第二作业车辆4,可以使用联合收割机、拖拉机以及插秧机等。
作为第二作业车辆4而使用的联合收割机、拖拉机以及插秧机的结构分别与作为第一作业车辆3而使用的联合收割机8、拖拉机9以及插秧机10的结构大致相同。联合收割机8、拖拉机9以及插秧机10具有:第二机体部(机体部19、62、102);以及相对于第二机体部而支承为能够升降、且在田地F进行作业的第二作业部(割取部17、耕耘机61、栽植部101)。
例如,作业援助系统2根据基于地图信息而确定的通报对象位置以及第二作业车辆4的位置信息而能够执行在第二作业车辆4到达通报对象位置之前执行规定的通报的通报处理。图14是示出根据地图信息确定的通报对象位置NT以及通报位置NP的示意图。
在第二作业车辆4是拖拉机9的情况下,通报对象位置NT例如是耕作层深度急剧变化的位置。基于第二作业车辆4在第二作业车辆4的行进方向上是否到达相距通报对象位置NT规定距离近前侧的通报位置NP而判定第二作业车辆4是否接近通报对象位置NT。规定的通报例如是指在搭载于第二作业车辆4的监视器、无线通信终端7(参照图1)显示的警告显示、从第二作业车辆4或无线通信终端7发出的警告语音等。
图15是示出这种通报处理的一例的流程图。首先,第二作业车辆4获取第二作业车辆4的当前位置(步骤S1)。然后,第二作业车辆4判定第二作业车辆4的当前位置是否为通报位置NP(步骤S2)。在第二作业车辆4的当前位置为通报位置NP的情况下(步骤S2:YES),第二作业车辆4开始向用户通报(步骤S3)。若开始向用户通报,则第二作业车辆4返回至步骤S1。
在第二作业车辆4的当前位置并非通报位置NP的情况下(步骤S2:NO),第二作业车辆4判定当前是否处于通报过程中(步骤S4)。在当前并未处于通报过程中的情况下(步骤S4:NO),第二作业车辆4返回至步骤S1。
在当前处于通报过程中的情况下(步骤S4:YES),第二作业车辆4判定是否已从通报对象位置NT通过(步骤S5)。在第二作业车辆4未从通报对象位置NT通过的情况下(步骤S5:NO),第二作业车辆4返回至步骤S1。在第二作业车辆4已从通报对象位置NT通过的情况下(步骤S5:YES),第二作业车辆4结束向用户的通报(步骤S6),并返回至步骤S1。
通过向用户通报已接近通报对象位置NT,使得用户能够在第二作业车辆4到达通报对象位置NT之前进行适合于通报对象位置NT的作业的准备。例如,在第二作业车辆4是拖拉机9的情况下,改变耕耘机61的高度位置而能够避免耕作层TL与耕耘机61的接触。由此,能够实现作业援助的质量的提高。
通报对象位置NT可以是特定的范围(两个坐标之间的区域)而非特定(单个)的坐标。在该情况下,当步骤S5中从该特定的范围通过时(步骤S5:YES),第二作业车辆4转移至步骤S6。
在通报对象位置NT为特定的范围的情况下,第二作业车辆4从通报位置NP通过之后直至到达通报对象位置NT为止的期间的通报内容可以与第二作业车辆4在通报对象位置NT行驶时的通报内容不同
具体而言,在第二作业车辆4从通报位置NP通过之后直至到达通报对象位置NT为止的期间从第二作业车辆4或无线通信终端7发出的警告语音、和第二作业车辆4在通报对象位置NT行驶时从第二作业车辆4或无线通信终端7发出的警告语音可以互不相同。
由此,用户在第二作业车辆4到达通报对象位置NT之前能够进行适合于通报对象位置NT的作业的准备,在此基础上,还能够根据通报而获知第二作业车辆4已到达通报对象位置NT。
另外,可以通过对在无线通信终端7显示的通报结束按钮进行操作而结束向用户的通报。在该情况下,根据通报结束按钮的操作或通报对象位置NT的通过状况而结束向用户的通报。
另外,作业援助系统2能够以使得第二作业部(割取部17、耕耘机61、栽植部101)的高度位置比基于地图信息而确定的耕作层深度高的方式对第二作业部的升降范围进行限制。因此,能够抑制第二作业部相对于耕作层TL的接触。另外,若预先登记暗渠的位置,则能够避免第二作业部(特别是耕耘机61)与暗渠接触。
图16是示出这种升降范围限制处理的一例的流程图。首先,第二作业车辆4获取第二作业车辆4的当前位置(步骤S11)。然后,第二作业车辆4根据地图信息而获取当前位置处的耕作层深度(步骤S12)。
而且,第二作业车辆4判定当前位置是否为需限制位置(步骤S13)。需限制位置例如为俯视时与暗渠重叠的位置。在第二作业车辆4的当前位置为需限制位置的情况下(步骤S13:YES),对第二作业部的升降范围进行限制(步骤S14)。若对第二作业部的升降范围进行限制,则第二作业车辆4返回至步骤S11。
在第二作业车辆4的当前位置并非需控制位置的情况下(步骤S13:NO),第二作业车辆4判定当前是否对第二作业部的升降范围进行限制(步骤S15)。
在当前对作业部的升降范围进行限制的情况下(步骤S15:YES),第二作业车辆4解除对作业部的升降范围的限制(步骤S16)。若对作业部的升降范围进行限制,则第二作业车辆4返回至步骤S11。在步骤S15中判定为当前未对第二作业部的升降范围进行限制的情况下(步骤S15:NO),第二作业车辆4返回至步骤S11。
另外,作业援助系统2能够生成供第二作业车辆4行驶的行驶路径。图17是示出利用作业援助系统2生成的行驶路径RT的一例的示意图。作业援助系统2确定禁止第二作业车辆4行驶的行驶禁止区域PA,并以不使其从行驶禁止区域PA通过的方式生成行驶路径RT。
图17所示的行驶路径RT为从田地F的周缘朝向中心的近似螺旋状。图17中由双点划线示出了行驶禁止区域PA。行驶禁止区域PA是指田地F内存在障碍物的区域、第二作业车辆4越嵌入则耕作层越凹陷的区域。
行驶路径RT例如利用无线通信终端7(参照图1)等能够生成行驶路径的终端而生成,并将其从无线通信终端7向第二作业车辆4发送。通过以不从行驶禁止区域PA通过的方式形成行驶路径RT,能够避开行驶禁止区域PA。由此,能够使第二作业车辆4顺畅地行驶。其结果,能够实现作业援助的质量的提高。
另外,除了行驶禁止区域PA以外,还可以在行驶路径RT设置行驶注意区域。行驶注意区域是指例如在车速较高的情况下、第二作业车辆4对行进方向进行了变更(转弯)的情况下而第二作业车辆4嵌入的区域。当在这种行驶注意区域行驶时,为了防止嵌入而降低第二作业车辆4的车速、或者开启差速锁、或者将方向盘15B、62B、102B的位置固定。
另外,在第二作业车辆4是联合收割机8的情况下,作业援助系统2能够利用地图信息而避免田地表面FS与割刀17A的接触。详细而言,当联合收割机8在田地F行驶时,为了将割刀17A与田地表面FS之间的距离维持恒定,而朝向目标位置对割取部17进行升降控制。
例如,如图18A所示,在随着趋向联合收割机8的行进方向的下游侧而耕作层深度D增大的情况下,通过使割取部17(第二作业部)相对于机体部19(第二机体部)升高而将作业部维持于目标位置。
如图18B所示,在随着趋向联合收割机8的行进方向的下游侧而耕作层深度D减小的情况下,在机体部19刚刚接近于斜面而倾斜之后使得割取部17相对于机体部19而下降,从而割刀17A有可能与表层SL接触。
因此,作业援助系统2基于地图信息将割取部17在随着趋向联合收割机8的行进方向的下游侧而耕作层深度D急剧减小的区域开始下降的位置152确定为迟钝控制位置。
另外,如图18C所示,在随着趋向联合收割机8的行进方向的下游侧而耕作层深度D在刚刚减小之后便增大的情况下,需要在刚刚使得割取部17相对于机体部19下降之后便使割取部17相对于机体部19而升高。因此,在割取部17相对于目标位置的追随性较高的情况下,当耕作层深度D开始增大时,割取部17有可能相对于机体部19过度下降。在这种情况下,割刀17A也有可能与表层SL接触。
即使在该情况下,作业援助系统2也基于地图信息将割取部17在随着趋向联合收割机8的行进方向的下游侧而耕作层深度D在刚刚减小之后便增大的区域开始下降的位置150以及开始升高的位置151确定为迟钝控制位置。
除了迟钝控制位置以外,作业援助系统2还基于地图信息而将割取部17开始升降的位置(图18A所示的位置153)确定为标准控制位置。
而且,作业援助系统2使得割取部17相对于联合收割机8到达迟钝控制位置时的目标位置的追随性低于割取部17相对于联合收割机8到达标准控制位置时的目标位置的追随性。
由此,能够抑制在迟钝控制位置处割取部17相对于机体部19的高度位置的变化量。由此能够抑制割刀17A相对于表层SL的接触。
如图18C所示,关于在耕作层深度D减小的情况下、耕作层深度D在刚刚减小之后便增大的情况下作业援助系统2是否将当前的联合收割机8的位置设为迟钝控制位置的判断,根据联合收割机8在每单位时间的倾斜角度的变化量是否大于基准量而判定。联合收割机8的车速越大,基准量设定得越低,耕作层TL的倾斜部分的距离越大,基准量设定得越低。
图19是示出这种升降控制处理的一例的流程图。首先,第二作业车辆4获取联合收割机8的当前位置(步骤S21)。然后,判定联合收割机8是否位于标准控制位置或迟钝控制位置中的任一位置(步骤S22)。
在联合收割机8的当前位置并非标准控制位置以及迟钝控制位置中的任一位置的情况下(步骤S22:NO),联合收割机8返回至步骤S21。在联合收割机8的当前位置为标准控制位置以及迟钝控制位置中的任一位置的情况下(步骤S22:YES),联合收割机8判定联合收割机8的当前位置为标准控制位置以及迟钝控制位置中的哪一位置(步骤S23)。
在联合收割机8的当前位置为标准控制位置的情况下(步骤S23:YES),联合收割机8将升降灵敏度设为标准(将追随性设为标准)而使割取部17升高或下降(步骤S24)。然后,在步骤S24之后,第二作业车辆4返回至步骤S21。在联合收割机8的当前位置为迟钝控制位置的情况下(步骤S23:NO),联合收割机8将升降灵敏度设为迟钝(将追随性设为迟钝)而使割取部17升高或下降(步骤S25)。而且,在步骤S25之后,联合收割机8返回至步骤S21。
本发明并不限定于以上说明的实施方式,还可以以其他方式而实施。
例如,在上述实施方式中,耕作层距离获取部50、96、136、表层距离获取部51、97、137、耕作层深度确定部52、98、138、以及地图信息生成部53、99、139是第一作业车辆3的控制部30、75、120中包含的功能处理部。然而,与上述实施方式不同,管理服务器6所具备的控制装置可以作为上述功能处理部而发挥功能。
另外,在上述实施方式中,耕作层深度信息基于第一机体部(机体部19、62、102)的姿势控制信息、以及第一作业部(割取部17、耕耘机61、栽植部101)的姿势控制信息而确定。然而,耕作层深度信息可以仅基于第一机体部的姿势控制信息而确定,也可以仅基于第一作业部的姿势控制信息而确定。
另外,在上述实施方式中,仅将惯性测量装置45、79、124的检测结果中的第三角速度传感器的检测结果用于第一机体部的姿势控制信息。然而,也可以与上述实施方式不同地将第一角速度传感器的检测结果以及第二角速度传感器的检测结果用于第一机体部的姿势控制信息。例如,通过利用第一角速度传感器的检测结果而能够获取在第一作业车辆3的行进方向上隔开规定间隔的地点的耕作层深度。另外,可以对各角速度传感器的检测结果进行组合。
虽然对本发明的实施方式进行了详细说明,但这些实施方式不过是为了使本发明的技术内容变得明确而使用的具体例而已,不应当限定为这些具体例而对本发明进行解释,本发明的范围仅由权利要求书来限定。
本申请与2018年5月28日向日本专利厅提交的特愿2018-101700号对应,此处通过引用而将该申请的全部公开内容都并入本申请中。
附图标记说明
1:地图信息生成系统
2:作业援助系统
3:第一作业车辆
4:第二作业车辆
8:联合收割机
9:拖拉机
10:插秧机
17:割取部(第一作业部、第二作业部)
18、63、103:行驶部
19、62、102:机体部(第一机体部、第二机体部)
61:耕耘机(第一作业部、第二作业部)
101:栽植部(第一作业部、第二作业部)
150:迟钝控制位置
151:迟钝控制位置
152:迟钝控制位置
153:标准控制位置
NT:通报对象位置
PA:行驶禁止区域
RT:行驶路径
WD:车宽方向(第一机体部的宽度方向)
Claims (7)
1.一种地图信息生成系统,其中,
所述地图信息生成系统获取:具有第一机体部以及支承于所述第一机体部的第一作业部的第一作业车辆在田地内的特定地点处的位置信息,
基于所述特定地点处的所述第一机体部的姿势控制信息以及/或者所述第一作业部的姿势控制信息,而确定多个耕作层深度信息,
生成:使得所述特定地点处的所述第一作业车辆的位置信息与所述多个耕作层深度信息建立关联的地图信息。
2.根据权利要求1所述的地图信息生成系统,其中,
所述多个耕作层深度信息中包括:一对行驶部接地的部位处的耕作层深度信息,所述一对行驶部对所述第一机体部以及所述第一作业部进行支承且配置为在所述第一机体部的宽度方向上隔开规定间隔。
3.根据权利要求1或2所述的地图信息生成系统,其中,
所述第一作业车辆的位置信息中包括高度信息,
对于所述地图信息,以能够互相识别的方式对所述特定地点处的所述多个耕作层深度信息进行显示,并且以能够识别的方式对所述特定地点处的高度信息以及与所述特定地点不同的其他地点处的高度信息进行显示。
4.一种作业援助系统,其基于利用权利要求1或2所述的地图信息生成系统生成的所述地图信息,而对第二作业车辆进行援助,
所述第二作业车辆具有:第二机体部,其在所述田地内行驶;以及第二作业部,其以相对于所述第二机体部能够升降的方式支承于所述第二机体部,且在所述田地内进行作业,其中,
所述作业援助系统根据基于所述地图信息确定的通报对象位置以及所述第二作业车辆的位置信息,而在所述第二作业车辆到达所述通报对象位置之前进行规定的通报。
5.根据权利要求4所述的作业援助系统,其中,
所述作业援助系统基于所述地图信息,以使得所述第二作业部的高度位置比基于所述地图信息而确定的耕作层深度更高的方式对所述第二作业部的升降范围进行限制。
6.根据权利要求4所述的作业援助系统,其中,
所述作业援助系统基于所述地图信息而确定禁止所述第二作业车辆行驶的行驶禁止区域,以不从所述行驶禁止区域通过的方式生成供所述第二作业车辆行驶的行驶路径。
7.根据权利要求4所述的作业援助系统,其中,
所述第二作业部构成为:设置于所述第二机体部的前部,且被朝向相对于所述田地的表面的高度呈恒定的目标位置进行升降控制,
所述作业援助系统基于所述地图信息而确定标准控制位置以及迟钝控制位置,使得所述第二作业部相对于所述第二作业车辆到达所述迟钝控制位置时的所述目标位置的追随性低于所述第二作业部相对于所述第二作业车辆到达所述标准控制位置时的所述目标位置的追随性。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018101700A JP7039026B2 (ja) | 2018-05-28 | 2018-05-28 | 地図情報生成システム、および作業支援システム |
| JP2018-101700 | 2018-05-28 | ||
| PCT/JP2019/018991 WO2019230358A1 (ja) | 2018-05-28 | 2019-05-13 | 地図情報生成システム、および作業支援システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112189227A true CN112189227A (zh) | 2021-01-05 |
Family
ID=68697226
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980034851.9A Pending CN112189227A (zh) | 2018-05-28 | 2019-05-13 | 地图信息生成系统以及作业援助系统 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP7039026B2 (zh) |
| KR (2) | KR102734299B1 (zh) |
| CN (1) | CN112189227A (zh) |
| WO (1) | WO2019230358A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114489048A (zh) * | 2021-12-29 | 2022-05-13 | 广州极飞科技股份有限公司 | 中耕机的作业方法和装置、中耕机,以及存储介质 |
Families Citing this family (68)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11079725B2 (en) | 2019-04-10 | 2021-08-03 | Deere & Company | Machine control using real-time model |
| US11672203B2 (en) | 2018-10-26 | 2023-06-13 | Deere & Company | Predictive map generation and control |
| US11240961B2 (en) | 2018-10-26 | 2022-02-08 | Deere & Company | Controlling a harvesting machine based on a geo-spatial representation indicating where the harvesting machine is likely to reach capacity |
| US11589509B2 (en) | 2018-10-26 | 2023-02-28 | Deere & Company | Predictive machine characteristic map generation and control system |
| US12069978B2 (en) | 2018-10-26 | 2024-08-27 | Deere & Company | Predictive environmental characteristic map generation and control system |
| US11178818B2 (en) | 2018-10-26 | 2021-11-23 | Deere & Company | Harvesting machine control system with fill level processing based on yield data |
| US11467605B2 (en) | 2019-04-10 | 2022-10-11 | Deere & Company | Zonal machine control |
| US11641800B2 (en) | 2020-02-06 | 2023-05-09 | Deere & Company | Agricultural harvesting machine with pre-emergence weed detection and mitigation system |
| US11653588B2 (en) | 2018-10-26 | 2023-05-23 | Deere & Company | Yield map generation and control system |
| US11957072B2 (en) | 2020-02-06 | 2024-04-16 | Deere & Company | Pre-emergence weed detection and mitigation system |
| US11234366B2 (en) | 2019-04-10 | 2022-02-01 | Deere & Company | Image selection for machine control |
| US11778945B2 (en) | 2019-04-10 | 2023-10-10 | Deere & Company | Machine control using real-time model |
| US12035648B2 (en) | 2020-02-06 | 2024-07-16 | Deere & Company | Predictive weed map generation and control system |
| US12225846B2 (en) | 2020-02-06 | 2025-02-18 | Deere & Company | Machine control using a predictive map |
| US12329148B2 (en) | 2020-02-06 | 2025-06-17 | Deere & Company | Predictive weed map and material application machine control |
| US11477940B2 (en) | 2020-03-26 | 2022-10-25 | Deere & Company | Mobile work machine control based on zone parameter modification |
| JP7341954B2 (ja) * | 2020-06-30 | 2023-09-11 | 株式会社クボタ | 作業機の表示装置 |
| JP2022036523A (ja) * | 2020-08-24 | 2022-03-08 | ヤンマーホールディングス株式会社 | 作業管理システム、作業管理方法及び作業管理プログラム |
| JP7510305B2 (ja) * | 2020-08-24 | 2024-07-03 | ヤンマーホールディングス株式会社 | 作業管理システム、作業管理方法及び作業管理プログラム |
| US12013245B2 (en) | 2020-10-09 | 2024-06-18 | Deere & Company | Predictive map generation and control system |
| US11845449B2 (en) | 2020-10-09 | 2023-12-19 | Deere & Company | Map generation and control system |
| US11592822B2 (en) | 2020-10-09 | 2023-02-28 | Deere & Company | Machine control using a predictive map |
| US11711995B2 (en) | 2020-10-09 | 2023-08-01 | Deere & Company | Machine control using a predictive map |
| US11864483B2 (en) | 2020-10-09 | 2024-01-09 | Deere & Company | Predictive map generation and control system |
| US11849672B2 (en) | 2020-10-09 | 2023-12-26 | Deere & Company | Machine control using a predictive map |
| US12550802B2 (en) | 2020-10-08 | 2026-02-17 | Deere & Company | Predictive machine characteristic map generation and control system |
| US11895948B2 (en) | 2020-10-09 | 2024-02-13 | Deere & Company | Predictive map generation and control based on soil properties |
| US12422847B2 (en) | 2020-10-09 | 2025-09-23 | Deere & Company | Predictive agricultural model and map generation |
| US12069986B2 (en) | 2020-10-09 | 2024-08-27 | Deere & Company | Map generation and control system |
| US11946747B2 (en) | 2020-10-09 | 2024-04-02 | Deere & Company | Crop constituent map generation and control system |
| US11825768B2 (en) | 2020-10-09 | 2023-11-28 | Deere & Company | Machine control using a predictive map |
| US11983009B2 (en) | 2020-10-09 | 2024-05-14 | Deere & Company | Map generation and control system |
| US11474523B2 (en) | 2020-10-09 | 2022-10-18 | Deere & Company | Machine control using a predictive speed map |
| US12419220B2 (en) | 2020-10-09 | 2025-09-23 | Deere & Company | Predictive map generation and control system |
| US11889788B2 (en) | 2020-10-09 | 2024-02-06 | Deere & Company | Predictive biomass map generation and control |
| US11927459B2 (en) | 2020-10-09 | 2024-03-12 | Deere & Company | Machine control using a predictive map |
| US11675354B2 (en) | 2020-10-09 | 2023-06-13 | Deere & Company | Machine control using a predictive map |
| US11727680B2 (en) | 2020-10-09 | 2023-08-15 | Deere & Company | Predictive map generation based on seeding characteristics and control |
| US11650587B2 (en) | 2020-10-09 | 2023-05-16 | Deere & Company | Predictive power map generation and control system |
| US11874669B2 (en) | 2020-10-09 | 2024-01-16 | Deere & Company | Map generation and control system |
| US12178158B2 (en) | 2020-10-09 | 2024-12-31 | Deere & Company | Predictive map generation and control system for an agricultural work machine |
| US20220110238A1 (en) | 2020-10-09 | 2022-04-14 | Deere & Company | Machine control using a predictive map |
| US11635765B2 (en) | 2020-10-09 | 2023-04-25 | Deere & Company | Crop state map generation and control system |
| US11871697B2 (en) | 2020-10-09 | 2024-01-16 | Deere & Company | Crop moisture map generation and control system |
| US11849671B2 (en) | 2020-10-09 | 2023-12-26 | Deere & Company | Crop state map generation and control system |
| US12386354B2 (en) | 2020-10-09 | 2025-08-12 | Deere & Company | Predictive power map generation and control system |
| US20220110258A1 (en) | 2020-10-09 | 2022-04-14 | Deere & Company | Map generation and control system |
| US11844311B2 (en) | 2020-10-09 | 2023-12-19 | Deere & Company | Machine control using a predictive map |
| US11889787B2 (en) | 2020-10-09 | 2024-02-06 | Deere & Company | Predictive speed map generation and control system |
| US12250905B2 (en) | 2020-10-09 | 2025-03-18 | Deere & Company | Machine control using a predictive map |
| JP7511491B2 (ja) * | 2021-01-05 | 2024-07-05 | 株式会社クボタ | 自動走行システム及び自動走行方法 |
| US12127500B2 (en) | 2021-01-27 | 2024-10-29 | Deere & Company | Machine control using a map with regime zones |
| JP7431771B2 (ja) * | 2021-03-25 | 2024-02-15 | ヤンマーホールディングス株式会社 | 領域管理方法、領域管理装置、及び領域管理プログラム |
| JP7506632B2 (ja) * | 2021-03-25 | 2024-06-26 | ヤンマーホールディングス株式会社 | 車両監視方法、車両監視システム、及び車両監視プログラム |
| US12229886B2 (en) | 2021-10-01 | 2025-02-18 | Deere & Company | Historical crop state model, predictive crop state map generation and control system |
| US12310286B2 (en) | 2021-12-14 | 2025-05-27 | Deere & Company | Crop constituent sensing |
| US12302791B2 (en) | 2021-12-20 | 2025-05-20 | Deere & Company | Crop constituents, predictive mapping, and agricultural harvester control |
| US12245549B2 (en) | 2022-01-11 | 2025-03-11 | Deere & Company | Predictive response map generation and control system |
| US12520759B2 (en) | 2022-01-26 | 2026-01-13 | Deere & Company | Systems and methods for predicting material dynamics |
| US12082531B2 (en) | 2022-01-26 | 2024-09-10 | Deere & Company | Systems and methods for predicting material dynamics |
| JP7726802B2 (ja) * | 2022-02-01 | 2025-08-20 | 共栄社シバウラ株式会社 | 刈取機 |
| US12295288B2 (en) | 2022-04-05 | 2025-05-13 | Deere &Company | Predictive machine setting map generation and control system |
| US12582035B2 (en) | 2022-04-08 | 2026-03-24 | Deere & Company | Systems and methods for predictive power requirements and control |
| US12298767B2 (en) | 2022-04-08 | 2025-05-13 | Deere & Company | Predictive material consumption map and control |
| US12284934B2 (en) | 2022-04-08 | 2025-04-29 | Deere & Company | Systems and methods for predictive tractive characteristics and control |
| US12358493B2 (en) | 2022-04-08 | 2025-07-15 | Deere & Company | Systems and methods for predictive power requirements and control |
| US12058951B2 (en) | 2022-04-08 | 2024-08-13 | Deere & Company | Predictive nutrient map and control |
| JP2023166325A (ja) * | 2022-05-09 | 2023-11-21 | ヤンマーホールディングス株式会社 | 作業領域管理方法、作業領域管理システム、及び作業領域管理プログラム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1189350A (ja) * | 1997-09-18 | 1999-04-06 | Kubota Corp | 水田作業機 |
| JPH1189346A (ja) * | 1997-09-22 | 1999-04-06 | Kubota Corp | 四輪駆動型の水田作業車 |
| JP2003092905A (ja) * | 2001-09-26 | 2003-04-02 | Kubota Corp | トラクタの耕深制御装置 |
| JP2004313132A (ja) * | 2003-04-21 | 2004-11-11 | Yanmar Co Ltd | 作業車両 |
| JP2016095213A (ja) * | 2014-11-13 | 2016-05-26 | ヤンマー株式会社 | 圃場状態測定方法 |
| JP2018072066A (ja) * | 2016-10-26 | 2018-05-10 | ヤンマー株式会社 | 運転支援システム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2568109B2 (ja) * | 1988-06-13 | 1996-12-25 | 株式会社小松製作所 | 地形情報表示装置 |
| JP2866723B2 (ja) * | 1990-08-24 | 1999-03-08 | ヤンマー農機株式会社 | 農作業機における作業機の左右水平姿勢制御装置 |
| JP3318170B2 (ja) * | 1995-11-02 | 2002-08-26 | 株式会社日立製作所 | 自動走行機械の経路生成方法 |
| JP2004008187A (ja) * | 2002-06-11 | 2004-01-15 | Yanmar Agricult Equip Co Ltd | 散布作業車 |
| JP4088107B2 (ja) * | 2002-06-19 | 2008-05-21 | ヤンマー農機株式会社 | 農業用作業車 |
| JP4909661B2 (ja) * | 2006-07-11 | 2012-04-04 | スガノ農機株式会社 | 等高線に基づいて作成された農作業用作業線に沿って走行位置を明示する表示装置及び農作業方法 |
| JP5320983B2 (ja) * | 2008-10-30 | 2013-10-23 | 井関農機株式会社 | 農業用管理システム |
| KR102318141B1 (ko) * | 2012-09-26 | 2021-10-28 | 가부시끼 가이샤 구보다 | 농작 관리 시스템 및 농작물 수확기 |
| JP5806997B2 (ja) * | 2012-09-28 | 2015-11-10 | 株式会社クボタ | 農作業情報管理装置及び農作業情報管理システム |
| JP6837767B2 (ja) * | 2016-07-19 | 2021-03-03 | 株式会社クボタ | 作業車及び作業車のための傾斜走行管理システム |
-
2018
- 2018-05-28 JP JP2018101700A patent/JP7039026B2/ja active Active
-
2019
- 2019-05-13 KR KR1020247029067A patent/KR102734299B1/ko active Active
- 2019-05-13 KR KR1020207032263A patent/KR102702555B1/ko active Active
- 2019-05-13 WO PCT/JP2019/018991 patent/WO2019230358A1/ja not_active Ceased
- 2019-05-13 CN CN201980034851.9A patent/CN112189227A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1189350A (ja) * | 1997-09-18 | 1999-04-06 | Kubota Corp | 水田作業機 |
| JPH1189346A (ja) * | 1997-09-22 | 1999-04-06 | Kubota Corp | 四輪駆動型の水田作業車 |
| JP2003092905A (ja) * | 2001-09-26 | 2003-04-02 | Kubota Corp | トラクタの耕深制御装置 |
| JP2004313132A (ja) * | 2003-04-21 | 2004-11-11 | Yanmar Co Ltd | 作業車両 |
| JP2016095213A (ja) * | 2014-11-13 | 2016-05-26 | ヤンマー株式会社 | 圃場状態測定方法 |
| JP2018072066A (ja) * | 2016-10-26 | 2018-05-10 | ヤンマー株式会社 | 運転支援システム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114489048A (zh) * | 2021-12-29 | 2022-05-13 | 广州极飞科技股份有限公司 | 中耕机的作业方法和装置、中耕机,以及存储介质 |
| CN114489048B (zh) * | 2021-12-29 | 2024-04-12 | 广州极飞科技股份有限公司 | 中耕机的作业方法和装置、中耕机,以及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019207284A (ja) | 2019-12-05 |
| JP7039026B2 (ja) | 2022-03-22 |
| KR102734299B1 (ko) | 2024-11-26 |
| KR102702555B1 (ko) | 2024-09-04 |
| WO2019230358A1 (ja) | 2019-12-05 |
| KR20240134247A (ko) | 2024-09-06 |
| KR20210015773A (ko) | 2021-02-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112189227A (zh) | 地图信息生成系统以及作业援助系统 | |
| KR102599328B1 (ko) | 슬립 판정 시스템, 주행 경로 생성 시스템, 및 포장 작업차 | |
| EP3892075B1 (en) | Systems comprising agricultural implements connected to lifting hitches and related control systems and methods | |
| CA2638947C (en) | Method and apparatus for optimization of agricultural field operations using weather, product and environmental information | |
| JP6956620B2 (ja) | 走行経路生成システム及び圃場作業車 | |
| US20100017075A1 (en) | Guiding Agricultural Implements | |
| US20090099737A1 (en) | Method and apparatus for optimization of agricultural field operations using weather, product and environmental information | |
| EP2020171B1 (en) | System and method for controlling a vehicle in response to a particular boundary | |
| JP2015112070A (ja) | 圃場作業機 | |
| US12364186B2 (en) | Agricultural implements having row unit position sensors and a rotatable implement frame, and related control systems and methods | |
| US20230225246A1 (en) | Agricultural residue depositing apparatus and method | |
| JP7274015B2 (ja) | 地図情報生成システム | |
| JP2022092209A (ja) | 作業車両 | |
| JP7546470B2 (ja) | 農作業機 | |
| JP2023125260A (ja) | 農作業支援システム | |
| JP7206161B2 (ja) | 圃場作業機、及び、作土深情報算出システム | |
| JP6651907B2 (ja) | 作業車両 | |
| JP7601035B2 (ja) | 農作業機 | |
| JP7645789B2 (ja) | 走行制御システム | |
| JP7641864B2 (ja) | 農作業システム | |
| WO2026060335A1 (en) | Apparatus and method for conversion of conventional agricultural equipment and implements to enable full autonomous operation | |
| EP4399957A1 (de) | Landwirtschaftliche erntemaschine mit einem vorsatzgerät | |
| JP2024076610A (ja) | 作業車 | |
| JP2026005057A (ja) | 作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |