-
Gebiet der
Erfindung
-
Die
Erfindung bezieht sich auf ein Verfahren zum Übertragen digitaler Daten,
bei dem die digitalen Daten in Sektoren gehalten werden, wovon jeder
mehrere Synchronisationsrahmen umfasst, die sequentiell übertragen
werden (einschließlich
der Aufzeichnung der digitalen Daten).
-
Beschreibung
der Hintergrundinformationen
-
Als
ein lauflängenbegrenztes
Codierungsverfahren (RLL-Codierungsverfahren), das ausgeführt wird, um
digitale Daten zu übertragen,
die Informationen anzeigen, oder um die digitalen Daten auf einem
Aufzeichnungsmedium aufzuzeichnen, ist eine EFM (Acht-zu-Vierzehn-Modulation)
bekannt, die für
eine CD (Kompaktplatte) oder dergleichen verwendet wird.
-
Im
EFM werden die digitalen Daten von acht Bits (einem Byte) in einen
lauflängenbegrenzten
Code von 14 Bits umgesetzt, der die Lauflängen-Begrenzungen erfüllt:
- minimaler
Lauflängenparameter
d = 2;
- maximaler Lauflängenparameter
k = 10,
mit dem minimalen Lauflängenparameter d = 2 und dem
maximalen Lauflängenparameter
k = 10 Kanalbits, was wenigstens 2 und höchstens 10 aufeinander folgende 'Nullen' zwischen aufeinander
folgenden "Einsen" bedeutet, wobei
Verbindungsbits aus drei Bits zu den Intervallen zwischen den entsprechenden
umgesetzten Daten hinzugefügt
werden und die resultierenden Daten als ein EFM-Modulations-Signal gebildet werden.
In einer Folge von EFM-Modulations-Signalen wird ebenso ein Bitzug
der Verbindungsbits gesetzt, um die vorangehenden Lauflängen-Begrenzung
zu erfüllen.
-
In
der CD ist ein Signal, das erhalten worden ist, indem ein Synchronisationssignal
zu dem EFM-Modulations-Signal hinzugefügt worden ist, aufgezeichnet
worden. Die Folge der EFM-Modulations-Signale wird in einer Weise
konstruiert, sodass ein sich wiederholendes Muster des maximalen
Intervalls, das der maximalen Lauflänge k entspricht, nämlich ein
sich wiederholendes Muster, wie z. B.
-
11
T – 11
T, in der Folge nicht vorhanden ist, wobei das sich wiederholende
Muster von 11T als ein Synchronisationssignal verwendet wird. Dabei
ist T eine fundamentale Periode, die einem binären Symbol entspricht. Ein
Muster Tmax, das z. B. der maximalen Lauflänge entspricht,
ist durch Tmax = (k + 1)T definiert, während ein
Muster, das der minimalen Lauflänge
entspricht, durch Tmin = (d + 1)T definiert
ist.
-
In
einem CD-Spieler wird das Synchronisationssignal extrahiert, indem
das sich wiederholende Muster von 11T von einem von der CD ausgelesenen
Signal erfasst wird.
-
In
einer DVD (digitalen Videoplatte), in der die Aufzeichnungsinformationen
mit einer hohen Dichte aufgezeichnet worden sind, oder bei einer
Datenübertragung
mit hoher Dichte wird es jedoch, wenn die Informationen gelesen
werden, in hohem Maße
durch eine Zwischensymbolstörung
beeinflusst. Das sich wiederholende Muster von 11 T als ein Synchronisationssignal
wird deshalb zu einem Muster, wie z. B. 11T – 10T oder 10T – 11T, geändert und
ausgelesen. Im Gegenteil tritt ein Fall auf, in dem das Datenmuster,
wie z. B. 10T – 11
T oder 11 T – 10T,
als ein EFM-Modulations-Signal in das sich wiederholende Muster
von 11T geändert
und fälschlich
als ein Synchronisationssignal erfasst wird.
-
Wie
oben erwähnt
worden ist, vergrößert sich
in der Aufzeichnung mit hoher Dichte oder der Datenübertragung
mit hoher Dichte eine Häufigkeit
der Fehler, die bei der Erfassung des Synchronisationssignals auftreten,
wobei, verursacht durch die fehlende Synchronisation, leicht ein
Bündelfehler
auftritt.
-
SCHOUHAMER
IMMINK KA: 'EFMPLUS:
THE CODING FORMAT OF THE MULTIMEDIA COMPACT DISC', IEEE TRANSACTIONS ON CONSUMER ELECTRONICS,
Bd.41, Nr. 3, 1. August 1995, Seiten 491-497, offenbart eine alternative
Acht-zu-Vierzehn-Modulation (EFM), die als EFMPIus bezeichnet wird,
die als ein Codierungsformat des Vorschlags für Multimedia-Kompaktplatten übernommen
worden ist. Die Rate des neuen Codes beträgt 8/16, was bedeutet, dass
eine 6-7 % höhere
Informationsdichte erhalten werden kann. EFMPIus ist das ganze Ebenbild
des EFM (die gleiche minimale und maximale Lauflänge, Taktinhalte usw.). Computer-Simulationen
haben gezeigt, dass die Niederfrequenzinhalte des neuen Codes nur
ein wenig größer als
sein herkömmliches
EFM-Gegenstück
sind.
-
EP-A-0
673 029 A1 offenbart ein Aufzeichnungsmedium, eine Signalaufzeichnungsvorrichtung
dafür und
eine Signalwiedergabevorrichtung dafür, wobei das Aufzeichnungsmedium
einen Aufzeichnungsbereich besitzt, der als Sektoren unterteilt
ist, von denen jeder aus mehreren Rahmen mit einer vorgegebenen
Bitlänge besteht,
worin wenigstens einer der Rahmen ein erstes Synchronisationsmuster,
um die Länge
des Rahmens darzustellen, ein zweites Synchronisationsmuster, das
aus einem vorgegebenen Signalmuster besteht, das im Signalmuster
der Anwenderdaten nicht vorhanden ist und das beschaffen ist, um
die Periode des Sektors darzustellen, Kenndaten, die an einer vorgegebenen
Position angeordnet sind, die dem zweiten Synchronisationsmuster
entsprechenden, und beschaffen sind, um den Sektor zu identifizieren,
und Fehlererfassungsdaten, um einen Fehler der Kenndaten zu erfassen,
enthält
und worin jeder der anderen Rahmen das erste Synchronisationsmuster,
die Anwenderdaten und wenigstens vorgegebene feste Daten, in denen
das zweite Synchronisationsmuster ersetzt ist und die in einem Signalmuster
der Anwenderdaten vorhanden sind, die Kenndaten, die Fehlererfassungsdaten
und Fehlerkorrekturdaten, um einen Fehler der Anwenderdaten zu korrigieren,
enthält.
-
ZUSAMMENFASSUNG
UND AUFGABE DER ERFINDUNG
-
Die
Erfindung wird gemacht, um die oben erwähnten Probleme zu lösen, wobei
es eine Aufgabe der Erfindung ist, ein Übertragungsverfahren für digitale
Daten zu schaffen, durch das die digitalen Daten mit einer hohen
Genauigkeit reproduziert werden können, selbst bei einer Aufzeichnung
mit hoher Dichte oder einer Datenübertragung mit hoher Dichte.
-
Die
Erfindung ist in den unabhängigen
Ansprüchen
definiert. Die abhängigen
Ansprüche
definieren besondere Ausführungsformen
der Erfindung.
-
Gemäß einer
Ausführungsform
1 der Erfindung wird außerdem
ein Übertragungsverfahren
für digitale Daten
geschaffen, um die digitalen Daten in Sektoren zu speichern, die
jeweils mehrere Synchronisationsrahmen enthalten, und um die digitalen
Daten sequentiell zu übertragen,
wobei der Synchronisationsrahmen ein Synchronisationssignal und
einen lauflängenbegrenzten
Code enthält,
der den digitalen Daten entspricht und Begrenzungen hinsichtlich
einer minimalen Lauflänge
und einer maximalen Lauflänge
erfüllt,
wobei das Synchronisationssignal einen bestimmten Code enthält, der
eine Position des Synchronisationssignals im Sektor angibt und der
es ermöglicht,
dass eine Gleichstromsteuerung ausgeführt wird.
-
Gemäß einer
Ausführungsform
umfasst der Synchronisationsrahmen, um die digitalen Daten in den Sektoren
zu halten, die jeweils mehrere Synchronisationsrahmen enthalten,
und um die digitalen Daten sequentiell zu übertragen, das Synchronisationssignal
und den lauflängenbegrenzten
Code, der die Begrenzungen der minimalen Lauflänge und der maximalen Lauflänge erfüllt, wobei
das Synchronisationssignal das Synchronisationsmuster enthält, das
das Bitmuster der Lauflänge,
die um 3T länger
als die maximale Lauflänge ist,
wobei die zusätzlichen
Bitmuster vor und nach dem Bitmuster angeordnet sind, wobei jedes
von ihnen eine Lauflänge
besitzt, die länger
als die minimale Lauflänge
ist. Das Synchronisationssignal enthält den bestimmten Code, der
die Position im Sektor anzeigt und ermöglicht, dass die Gleichstromsteuerung
ausgeführt
wird.
-
KURZBESCHREIBUNG
DER ZEICHNUNG
-
1 ist eine graphische Darstellung,
die eine schematische Konstruktion einer Übertragungssignal-Bildungsvorrichtung
zum Bilden eines Übertragungssignals
durch ein Übertragungsverfahren
für digitale Daten
gemäß der Erfindung
zeigt;
-
2 ist eine graphische Darstellung,
die ein Synchronisationssignal gemäß der Erfindung zeigt;
-
3 ist eine graphische Darstellung,
die das Synchronisationssignal gemäß der Erfindung zeigt;
-
4 ist eine graphische Darstellung,
die ein Format des Synchronisationssignals zeigt;
-
5 ist eine graphische Darstellung,
die eine Signalform des Übertragungssignals
mit einem Synchronisationsmuster zeigt;
-
6 ist eine graphische Darstellung,
die ein Übertragungssignalformat
eines Sektors zeigt;
-
7 ist eine graphische Darstellung,
die einen Operationsfluss einer Synthetisierungsschaltung 30 zeigt;
und
-
8 ist eine graphische Darstellung,
die die Speicherinhalte in einem Speicher zeigt.
-
AUSFÜHRLICHE
BESCHREIBUNG DER BEVORZUGTEN AUSFÜHRUNGS-FORM
-
1 ist eine graphische Darstellung,
die eine Konstruktion einer Übertragungssignal-Bildungsvorrichtung
zum Bilden eines Übertragungssignals
durch ein Übertragungsverfahren
für digitale
Daten gemäß der Erfindung
zeigt.
-
In 1 setzt ein 8-16-Modulator
(Acht-zu-Sechzehn-Modulator) 10 die zu übertragenden digitalen Daten
nach jeweils acht Bits in ein 8-16-Modulations-Signal (einen lauflängenbegrenzten
Code) aus 16 Bits (ein Codewort) um, sodass die Lauflängen-Begrenzungen
der minimalen Lauflänge
d = 2T und der maximalen Lauflänge
k = 10T erfüllt
sind.
-
Alle
durch den 8-16-Modulator 10 erhaltenen Codewörter besitzen
Musterformen, die eine der folgenden Bedingungen Next_State1 bis
Next State4 erfüllen.
- Next State1: Das Codewort, in dem die Anzahl der fortlaufenden
0 am Ende gleich 0 oder 1 ist.
- Next_State2: Das Codewort, in dem die Anzahl der fortlaufenden
0 am Ende gleich 2 bis 5 ist und das erste Bit und das 13. Bit des
nächsten
Codeworts gleich 0 sind.
- Next_State3: Das Codewort, in dem die Anzahl der fortlaufenden
0 am Ende gleich 2 bis 5 ist und wenigstens irgendeines des ersten
und 13. Bits des nächsten
Codeworts gleich 0 ist.
- Next_State4: Das Codewort, in dem die Anzahl der fortlaufenden
0 am Ende gleich 6 bis 9 ist.
-
Das
Modulationsverfahren ist durch den folgenden Artikel veröffentlicht
worden.
-
Kees
A. Schouhamer Immink, "EFMPIus:
The Coding format of the High-Density Compact Disc", IEEE International
Conference on Consumer Electronics, WPM6.1, 1995.
-
Eine
Synchronisationssignal-Erzeugungsschaltung 20 erzeugt 32 Synchronisationssignale
mit verschiedenen Bitmustern, wie in 2 und 3 gezeigt ist, und überträgt sie zu
einer Synthetisierungsschaltung 30, die vorzugsweise eine
CPU und einen Speicher enthält,
wie später
beschrieben wird.
-
Diese
32 Synchronisationssignale sind in acht Gruppen SY0 bis SY7 unterteilt,
wie in den 2 und 3 gezeigt ist.
-
4 ist eine graphische Darstellung,
die ein Format des Synchronisationssignals zeigt.
-
In 4 bezeichnen die Bits 1
bis 3 des Synchronisationssignals die Verbindungsbits, die vorgesehen sind,
um die vorangehenden Begrenzungen der minimalen Lauflänge d und
der maximalen Lauflänge
k zu erfüllen,
wenn das Synchronisationssignal mit einem Codewort direkt vor ihm
verbunden ist. Ein Verbindungsbitmuster durch die Bits 1 bis 3 gibt
irgendeines von {000}, {001} und {100} an.
-
Ein
Synchronisationsmuster, um das Synchronisationssignal zu identifizieren,
ist den Bits 11 bis 32 des Synchronisationssignals zugewiesen.
-
Das
Synchronisationsmuster ist ein Bitmuster einer Anordnung, wie z.
B. (4T oder mehr – 14T – 4T), in
der ein Muster von 14T, das um 3T größer als das maximale Intervall
11T im 8-16-Modulations-Signal ist, auf einen Kern gesetzt ist,
während
ein Muster mit einer festen Länge
von 4T und ein Muster von 4T oder mehr nach bzw. vor dem Muster
von 14T angeordnet sind, nämlich
das Bitmuster {0001000000000000010001}.
-
In
diesem Fall ist das Synchronisationsmuster ein festes Muster, das
allen Synchronisationssignalen gemeinsam ist, wie in den 2 und 3 gezeigt ist.
-
Im
Synchronisationsmuster wird das Muster von 14T, das um 3T größer als
das maximale Intervall 11T im 8-16-Modulations-Signal ist, verwendet,
selbst wenn das 11T-Muster im 8-16-Modulations-Signal, zurückzuführen auf
einen Einfluss durch eine Zwischensymbolstörung, flankenverschoben und
zu einer Muster von 12T geändert
ist und ferner das Synchronisationsmuster selbst flankenverschoben
und nur um 1T verkürzt
ist, um zu ermöglichen,
dass beide von ihnen zu unterscheiden sind. Das 14T-Muster bezeichnet
eine kürzeste Länge, die
gesetzt werden kann, wenn die Flankenverschiebung betrachtet wird.
-
Durch
das Anordnen eines zusätzlichen
Bitmusters mit einer festen Länge
von 4T und eines zusätzlichen
Bitmusters von 4T oder mehr nach und vor dem 14T-Muster wird ein Intervall geschaffen,
das um wenigstens 1T größer als
die kürzesten
Bits von 3T ist, wobei dadurch der Einfluss einer Zwischensymbolstörung mit
einer benachbarten Marke verringert wird.
-
5 ist eine graphische Darstellung,
die eine Signalform des Übertragungssignals
mit einem Synchronisationsmuster zeigt.
-
Wie
in 5 gezeigt ist, kann,
falls die Punkte der voreilenden (der nacheilenden, wenn die Signalform invertiert
ist) der Kanten, nämlich
ein Intervall zwischen den Punkten A und B durch einen Slice-Pegel
erfasst wird, der durch eine Linie aus abwechselnden langen und
kurzen Strichen gezeigt ist, selbst wenn der Slice-Pegel nicht durch
eine Einschwingoperation oder dergleichen eingeschwungen ist, das
Kantenintervall stabil erfasst werden. Durch das Erfassen eines
18T-Musters, in dem das 14T-Muster und das hintere 4T-Muster kombiniert
sind, und durch das Auswählen
des Musters, in dem das Muster von 14T vorhanden ist, kann das ausgewählte Muster
als ein Signal für
eine Geschwindigkeitserfassung eines Spindel-Servomotors beim Starten
verwendet werden. Durch das Setzen der Markenlängen vor und nach dem 14T-Muster,
sodass sie gleich oder größer als
4T sind, in denen eine Amplitude größer als die kürzeste Markenfänge ist,
wird für
eine Fluktuation des Slice-Pegels eine zulässige Amplitude vergrößert. Obwohl
es außerdem
möglich
ist, gemäß der Ausführungsform
eine Kombination der Marken von 5T oder mehr zu verwenden, weil
ein Wirkungsgrad bevorzugt betrachtet wird, wird eine hintere Markenlänge auf
4T gesetzt, während
eine vordere Markenlänge auf
4T oder mehr gesetzt wird.
-
Der
Grund, warum das hintere Muster des 14T-Musters auf die feste Länge von
4T und das vordere Muster auf 4T oder mehr gesetzt wird, ist, weil,
wenn ein bestimmter Code, der im Folgenden beschrieben wird, ferner
vor das 14T-Muster gesetzt wird, ein Freiheitsgrad des vorderen
Musters vergrößert wird
und die Anzahl der Muster, die als ein bestimmter Code zu erhalten
sind, ausreichend gesichert ist.
-
Wie
in 4 gezeigt ist, ist
der bestimmte Code den Bits 4 bis 10 des Synchronisationssignals
zugewiesen. Abhängig
von der Kombination mit den Verbindungsbits, die direkt vor dem
bestimmten Code vorhanden sind, kann eine Position in einem Sektor,
die im Folgenden erklärt
wird, identifiziert werden.
-
Die
Synthetisierungsschaltung 30 in 1 wählt
irgendeines der durch die Synchronisationssignal-Erzeugungsschaltung 20 erzeugten
Synchronisationssignale nach jedem Zug der 8-16-Modulations-Signale,
die vom 8-16-Modulator 10 sequentiell geliefert werden,
nämlich
nach jeweils 91 Codewörtern,
aus und erzeugt ein Signal, das erhalten wird, indem das ausgewählte Synchronisationssignal
zum Kopf der 91 Codewörter
hinzugefügt
wird, als ein Übertragungssignal,
das einem Synchronisationsrahmen entspricht.
-
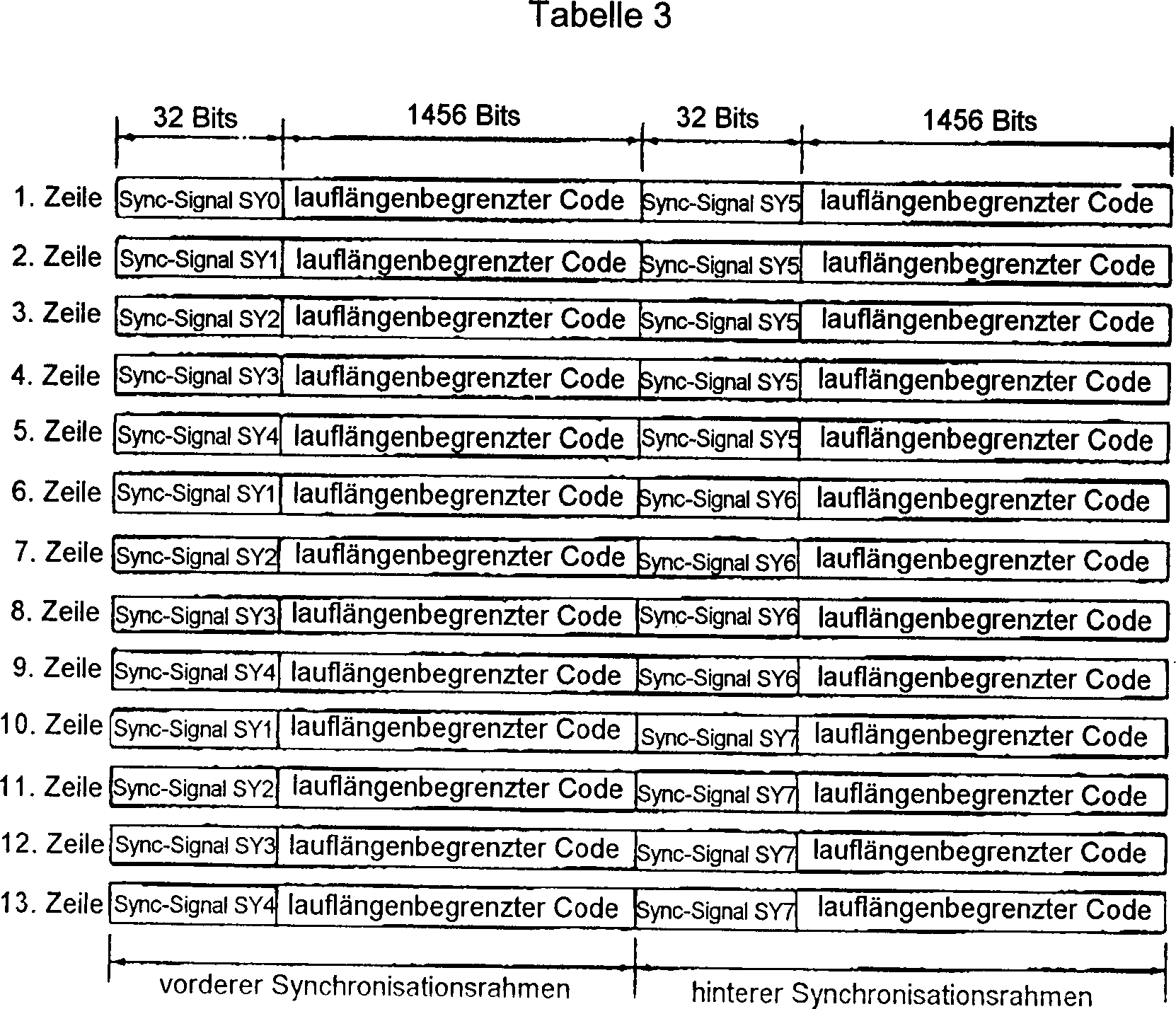
6 ist eine graphische Darstellung,
die ein Format des Übertragungssignals
für einen
Sektor zeigt, das durch die Synthetisierungsschaltung 30 erzeugt
wird.
-
Wie
in 6 gezeigt ist, umfasst
ein Sektor 13 Zeilen. Jeder Zeile sind zwei Synchronisationsrahmen zugewiesen.
Das jedem Synchronisationsrahmen zugewiesene Synchronisationssignal
wird aus den 32 Arten der Synchronisationssignale ausgewählt, die
in den 2 und 3 gezeigt sind. Das einem
vorderen Synchronisationsrahmen der ersten Zeile zugewiesene Synchronisationssignal
entspricht z. B. dem aus den 32 Arten der Synchronisationssignale
ausgewählten
SY0. Anschließend
an die erste Zeile wird das Synchronisationssignal, dass dem vorderen
Synchronisationsrahmen zugewiesen ist, in Übereinstimmung mit einer Zunahme der
Zeilennummer zyklisch wiederholt, wie SY1 bis SY4. Die Unterschiede
zwischen SY1 bis SY4 werden durch den bestimmten Code und die Verbindungsbits
bestimmt.
-
Die
Operation der Synthetisierungsschaltung 30 zum Bilden des Übertragungssignals
eines Sektors wird nun unter Bezugnahme auf einen Ablauf nach 7 beschrieben.
-
Eine
CPU (Zentraleinheit) und ein Speicher (die nicht gezeigt sind) sind
in der Synthetisierungsschaltung 30 enthalten, wobei die
Informationen, wie in 8 gezeigt
ist, vorausgehend im Speicher gespeichert worden sind.
-
Im
Ablauf nach 7 setzt
die CPU in der Synthetisierungsschaltung 30 zuerst 1 als
eine Anfangsadresse in ein eingebautes Register n (Schritt S1).
Die CPU liest die Informationen, die der Adresse entsprechen, die
im Register n gespeichert ist, jeweils aus dem in 8 gezeigten Speicher aus und speichert
die Informationen in den Registern X und Y (Schritt S2). Wenn z.
B. im Register n 1 gespeichert worden ist, werden die bei der Adresse
1 im Speicher in 8 gespeicherten
SYO und SY5 ausgelesen und in den Registern X bzw. Y gespeichert.
-
Die
CPU wählt
das Synchronisationssignal, das den Speicherinhalten im Register
X entspricht, aus den in den 2 und 3 gezeigten 32 Arten der
Synchronisationssignale aus, die von der Synchronisationssignal-Erzeugungsschaltung 20 geliefert
werden. Wenn z. B. SY0 im Register X gespeichert worden ist, wird
das SY0 entsprechende Signal aus den in den 2 und 3 gezeigten
32 Arten der Synchronisationssignale ausgewählt. Wenn das Codewort, das
direkt vor dem Synchronisationssignal vorhanden ist, Next State1
(die Anzahl der fortlaufenden 0 am Ende ist gleich 1 oder 0) oder
Next State2 (die Anzahl der fortlaufenden 0 am Ende ist gleich 2
bis 5) ist, wählt
die CPU aus den in den 2 und 3 gezeigten SY0 das Synchronisationssignal aus,
in dem das Verbindungsbitmuster durch die Bits 1 bis 3 auf {000}
gesetzt ist. Es gibt in 2 die
folgenden zwei Arten der Synchronisationssignale SY0, denen das
Verbindungsbitmuster gleich {000} ist:
- {00010010010001000000000000010001}
- {00010010000001000000000000010001}
-
Das
heißt,
nur die Werte des Bits 10 in den bestimmten Codes unterscheiden
sich in Bezug auf die zwei Synchronisationssignale SY0, wobei die
Anzahl der Invertierungen von ihnen sich unterscheidet, wenn sie
NZI-moduliert werden. Die CPU wählt
das Muster, das für
die Gleichstromunterdrückung
optimal ist, aus den zwei Arten der Muster aus, und setzt das ausgewählte Muster
auf das endgültige
SY0.
-
Die
CPU wählt
das Synchronisationssignal aus, das den Speicherinhalten im Register
Y entspricht. Wenn z. B. im Register Y SY5 gespeichert worden ist,
wird das SY5 entsprechende Synchronisationssignal aus den in den 2 und 3 gezeigten 32 Arten der Synchronisationssignale
ausgewählt.
Wenn das Codewort, das direkt vor dem Synchronisationssignal vorhanden
ist, Next_State3 (die Anzahl der fortlaufenden 0 am Ende ist gleich
2 bis 5) oder Next_State4 (die Anzahl der fortlaufenden 0 am Ende
ist gleich 6 bis 9) ist, wählt die
CPU aus den in den 2 und 3 gezeigten SY5 das Synchronisationssignal
aus, in dem das Verbindungsbitmuster durch die Bits 1 bis 3 gleich
{100} ist. Es gibt in 3 die
folgenden zwei Arten der Synchronisationssignale, denen das Verbindungsbitmuster
gleich {100} ist:
- {10001001000001000000000000010001}
- {10000001000001000000000000010001}
-
Das
heißt,
nur die Werte des Bits 5 in den bestimmten Codes unterscheiden sich
in Bezug auf die beiden Muster. Die CPU wählt das Muster, das für die Gleichstromunterdrückung optimal
ist, aus den zwei Arten der Muster aus, und setzt das ausgewählte Muster
auf das endgültige
SY5 (Schritt S3).
-
Die
CPU erzeugt ein Muster, das durch das serielle Verbinden des 8-16-Modulations-Signals
aus 91 Codewörtern
mit jedem der auf der Grundlage der Speicherinhalte der Register
X und Y ausgewählten
Synchronisationssignale, wie oben erwähnt worden ist, erhalten wird,
als ein Übertragungssignal
einer Zeile, wie in 6 gezeigt
des (Schritt S4).
-
Die
CPU beurteilt, ob die Inhalte im Register n größer als 13 sind oder nicht
(Schritt S5). Die CPU addiert 1 zu den Inhalten im Register n (Schritt
S6), bis im Schritt S5 bestimmt wird, dass die Inhalte im Register n
größer als
13 sind, wobei sie danach die Operationen im Schritt S2 und den
nachfolgenden Schritten wiederholt ausführt. Die Übertragungssignale der ersten
bis 13. Zeilen (von einem Sektor), wie in 6 gezeigt ist, werden durch die wiederholte
Operation sequentiell erzeugt.
-
Wenn
z. B. angenommen wird, dass 16 Sektoren als ein Fehlerkorrekturblock
fehlerkorrektur-codiert werden und der resultierende Block übertragen
wird, führt
eine Decodiererseite, die das Übertragungssignal mit
der Struktur empfängt,
einen Fehlerkorrekturprozess unter Verwendung der Übertragungssignale
aus, von denen jedes die Sektorstruktur besitzt, wie in 6 gezeigt ist, und die nach
der Anzahl von nicht weniger als 16 Sektoren als ein Fehlerkorrekturblock
gesammelt werden. Im Decodieren ist es wichtig, dass nach dem Abschluss
des Empfangs des Übertragungssignals
nach dem Kopf des Sektors gesucht wird, eine aufge zeichnete Adresse
sofort unmittelbar ausgelesen wird und die Daten des Fehlerkorrekturblocks
gesammelt werden. Wenn die Übertragung
mit hoher Dichte ausgeführt
wird, gibt es einen Fall, in dem das Synchronisationssignal SY0
als ein Kopf des Sektors nicht ausgelesen werden kann, oder einen
Fall, in dem das andere Signal fälschlich
als ein Sektorkopf ausgelesen wird, sodass eine Möglichkeit
auftritt, sodass ein gravierender Fehler verursacht wird, der nicht
korrigiert werden kann.
-
Im Übertragungssignal
gemäß der Erfindung,
wie in den 2 und 3 gezeigt ist, werden die
32 Arten der Synchronisationssignale mit verschiedenen Bitmustern
vorbereitet, wobei ferner, wie in 6 gezeigt
ist, das Kombinationsmuster des Synchronisationssignals, das jeder
Zeile in einem Sektor zuzuweisen ist, in jeder Zeile auf ein eindeutiges
Muster gesetzt wird. Wie in 6 gezeigt
ist, wird das Synchronisationssignal vor dem Synchronisationsrahmen,
der am Kopf jeder Zeile vorhanden ist, in Übereinstimmung mit einer Zunahme der
Zeilennummer zyklisch wiederholt, wie SY1 bis SY4.
-
Auf
der Decodiererseite, die das Übertragungssignal
mit der Struktur empfängt,
kann die Zeile in einem Sektor spezifiziert werden, indem das Kombinationsmuster
der Synchronisationssignafe erkannt wird, sodass die Position von
SY0 am Sektorkopf vorhergesagt werden kann. Wenn die Zeile spezifiziert
ist, kann ferner eine Verhinderungsfunktion für einen Lesefehler des Synchronisationssignals
aufgestellt werden, indem die sich wiederholenden Muster von SY1
bis SY4 erkannt werden. Weil die Zeile auf der Grundlage des Kombinationsmusters
der in einer Zeile vorhandenen zwei Synchronisationssignale spezifiziert
ist, ist es ausreichend, acht Arten von SY0 bis SY7 als die Arten
der Synchronisationssignale in einem Sektor zu verwenden.
-
Selbst
wenn das Synchronisationssignal SY0 als ein Kopf des Sektors, verursacht
durch den Einfluss durch die Übertragung
mit hoher Dichte, nicht ausgelesen werden kann, wird deshalb auf
der Decodiererseite die Kopfposition des Sektors auf der Grundlage
des nach SY0 vorhandenen Synchronisationssignals erkannt, wobei
dadurch ermöglicht
wird, dass ein richtiger Fehlerkorrekturblock erkannt wird.
-
Wie
durch die 2 und 3 offensichtlich selbstverständlich ist,
wird ferner SY0 in einer Weise ausgewählt, sodass ein Zwischencodeabstand
zwischen SY0 und den Kopfsynchronisationen (SY1 bis SY4) von jeder
der anderen Zeilen maximal wird. Der Zwischencodeabstand bezeichnet
eine Ähnlichkeit
zwischen den Synchronisationssignalen. Wenn es ein Synchronisationssignal
gibt, in dem sich die Anzahl der 1 von der des anderen Signals unterscheidet,
wird bestimmt, dass das Synchronisationssignal ein Signal mit dem
größten Abstand
ist. Im Fall des Synchronisationssignals, in dem die Anzahl der
1 gleich der des anderen Synchronisationssignals ist, wird die Anzahl
der Verschiebungen der Position der 1, bis das Signal mit einem
Synchronisationssignal übereinstimmt,
auf den Abstand zum Synchronisationssignal gesetzt. Durch das Bestimmen von
SY0, wie oben erwähnt
worden ist, wird die Wahrscheinlichkeit, sodass SY1 bis SY4 fehlerhaft
als SY0 gelesen werden, verringert. Mit anderen Worten, dass Synchronisationssignal,
dass zu SY0 relativ ähnlich
ist, wird auf das Zwischen-Synchronisationssignal (SY5 bis SY7)
jeder Zeile gesetzt, wobei ein gemeinsames Synchronisationssignal
im Kopf und in den Mittelabschnitten jeder Zeile nicht verwendet
wird. Wenn das gemeinsame Synchronisationssignal im Kopf und in
den Mittelabschnitten der Zeile nicht verwendet wird, gibt es außerdem eine
Wirkung, sodass eine Wahrscheinlichkeit, dass der Kopf und die Mittelabschnitte
jeder Zeile fehlerhaft durch den Lesefehler erkannt werden, verringert
ist.
-
Wie
in den 2 und 3 gezeigt ist, werden, selbst
wenn Next_State des Codewortes direkt vor dem Synchronisationssignal
irgendeinen eines Falles aus 1 oder 2 oder eines Falles aus 3 oder
4 anzeigt, zwei Arten von 32-Bit-Mustern, in denen die geraden und
ungeraden Zahlen der Invertierungen (die Anzahl der 1) und die Vorzeichen
des Unterschieds (ein Unterschied zwischen positiven und negativen
Bits der Signalform) jeweils verschieden sind, SYO bis SY7 zugewiesen.
Das heißt,
im Vergleich zu einem Muster kann, weil die Polaritäten der
Gleichstromkomponente des anderen Musters selbst und der Signalform
des Signals am Ende des anderen Musters zu derjenigen des einen
Musters entgegengesetzt sind, die Gleichstromkomponente des Signals
verringert werden, indem irgendeines von ihnen ausgewählt wird.
-
Wie
oben erwähnt
worden ist, umfasst im Übertragungsverfahren
für digitale
Daten gemäß der Erfindung,
wenn die digitalen Daten in den Sektoren gehalten werden, von denen
jeder mehrere Synchronisationsrahmen umfasst, und sequentiell übertragen
werden, der Synchronisationsrahmen das Synchronisationssignal und
den lauflängenbegrenzten
Code, der die Begrenzungen der minimale Lauflänge und der maximale Lauflänge erfüllt, wobei
das Synchronisationssignal das Synchronisationsmuster, das das Bitmuster
einer Lauflänge
umfasst, die um 3T länger
als die maximale Lauflänge
ist, und die zusätzlichen
Bitmuster, die vor und nach dem Bitmuster angeordnet sind, und von
denen jedes eine Lauflänge
besizt, die länger
als die minimale Lauflänge
ist, enthält.
-
Gemäß der Erfindung
können
deshalb das Synchronisationssignal mit dem Signal durch den lauflängenbegrenzten
Code richtig unterschieden und erfasst werden, selbst wenn sie,
verursacht durch den Einfluss einer Zwischensymbolstörurng, jeweils
um 1T flankenverschoben sind.
-
Im Übertragungsverfahren
für digitale
Daten gemäß der Erfindung
enthält
das Synchronisationssignal den bestimmten Code, die Position im
Sektor anzeigt und der ermöglicht,
dass die Gleichstromsteuerung ausgeführt wird.
-
Mit
der Konstruktion kann deshalb, selbst wenn das Synchronisationssignal
am Kopf des Sektors nicht ausgelesen werden kann oder das andere
Signal fehlerhaft als ein Sektorkopf ausgelesen wird, ein richtiger Kopf
des Sektors auf der Grundlage der anderen Synchronisationssignale
vorhergesagt werden, sodass die digitalen Daten richtig reproduziert
werden können.
-
Die
Erfindung ist oben unter Bezugnahme auf ihre bevorzugte Ausführungsform
beschrieben worden. Es ist selbstverständlich, dass durch die Fachleute
auf dem Gebiet viele Modifikationen und Variationen ausgeführt werden
können.