EP0423372A1 - Kontrollanordnung für fahrzeuglenkvorrichtung und steuerungsverfahren dazu - Google Patents
Kontrollanordnung für fahrzeuglenkvorrichtung und steuerungsverfahren dazu Download PDFInfo
- Publication number
- EP0423372A1 EP0423372A1 EP90907382A EP90907382A EP0423372A1 EP 0423372 A1 EP0423372 A1 EP 0423372A1 EP 90907382 A EP90907382 A EP 90907382A EP 90907382 A EP90907382 A EP 90907382A EP 0423372 A1 EP0423372 A1 EP 0423372A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- travel
- angle
- lever
- controller
- upper rotary
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2045—Guiding machines along a predetermined path
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2037—Coordinating the movements of the implement and of the frame
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/225—Control of steering, e.g. for hydraulic motors driving the vehicle tracks
Definitions
- This invention relates to a vehicle travel controller and a control method for the same and, more particularly, to a controller and a method for a controlling travel of an industrial vehicle, more specifically, a construction vehicle such as a hydraulic power shovel.
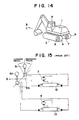
- a vehicle such as that shown in Fig. 14, comprising an upper rotary body 1 having a cab 4, and a lower traveling unit 2 made up of a right track 6 having a right travel motor 7 and a left track 8 having a left travel motor 9, a right travel lever 51 and a left travel lever 52 linked to pilot pressure generating valves 53 are provided in the cab 4, and a right travel operation valve 12 and a left travel operation valve 13 mounted on the upper rotary body 1 are respectively connected to the right and left pilot pressure generating valves 53, the right travel motor 7 and the right travel operation valve 12, and the left travel motor 9 and the left travel operation valve 13 attached to the lower traveling unit 2 being connected respectively, as shown in Fig. 15.
- Pressure oil is supplied from an unillustrated hydraulic pressure generation source to these circuits.
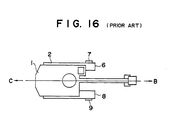
- the pilot pressure generating valve 53 When the right travel lever 51 is inclined toward the front of the upper rotary body 1 (in the direction B), i.e., in the forward traveling direction, the pilot pressure generating valve 53 generates a pilot pressure to operate the right travel operation valve 12 and to thereby rotate the right travel motor 7 in the forward traveling direction.
- the right track 6 moves forward and the lower traveling unit 2 and the upper rotary body integrally turn counterclockwise.
- the left travel lever 52 is inclined in the forward traveling direction, only the left track 8 moves forward and the vehicle turns clockwise.
- the right and left travel levers 51 and 52 are simultaneously inclined in the forward traveling direction, the vehicle moves straight ahead.
- the present invention has been achieved in view of the above-described problems, and an object of the present invention is to provide a vehicle travel controller and a control method for the same which enable the operator to easily make the vehicle travel in any direction selected.
- a vehicle travel controller in accordance with the present invention has a travel lever mounted on the upper rotary body and serving to control the traveling direction, a lever angle detector for detecting the angle of the direction of operation of the travel lever, a vehicle body rotation encoder for detecting the relative rotation angle between the upper rotary body and the lower traveling unit, a controller for effecting arithmetic operation of signals supplied from the lever angle detector and the vehicle body rotation encoder, and a travel operation valve capable of operating by receiving a signal output from the controller.
- a travel lever mounted on the upper rotary and serving to control the traveling direction and the traveling speed may be provided together with a lever angle detector for detecting the angle of the direction of operation of the travel lever and the angle of inclination of the same.
- a gyro compass provided on the upper rotary body to always indicate the geomagnetic north and to detect the angle between the upper rotary body and the north direction may also be provided.
- a vehicle travel control method in accordance with the present invention comprising inclining the travel lever in a desired traveling direction, detecting the angle of the direction of operation of the travel lever with the lever angle detector, detecting the relative rotation angle between the upper rotary body and the lower traveling unit with the vehicle body rotation encoder, supplying signals relating to these angles to the controller, effecting arithmetic operation with the controller to determine the direction of turning of the lower traveling unit, supplying a signal output therefrom to the travel operation valve to make the lower traveling unit perform non-traveling turning, stopping non-traveling turning when the lower traveling unit becomes parallel to the direction of travel lever operation, and controlling the travel operation valve to make the lower traveling unit travel straight in the direction of travel lever operation.
- the arrangement may be such that the angle of the direction of operation of the travel lever and the angle of inclination of the same are detected with the lever angle detector; signals relating to them are supplied to the controller; a signal output from the controller is supplied to the travel operation valve to make the lower traveling unit perform non-traveling turning at a speed proportional to the inclination angle of the travel lever; this non-traveling turning is stopped when the lower traveling unit becomes parallel to the direction of travel lever operation; and the travel operation valve is controlled to make the lower traveling unit travel straight in the direction of operation of the travel lever at a speed proportional to the inclination angle of the same.
- the arrangement may be such that the angle between the upper rotary body and the geomagnetic north is detected with a gyro compass; relating signals are supplied to the controller; a signal output from the controller is supplied to the travel operation valve to make the lower traveling unit perform non-traveling turning; the initial angle between the upper rotary body and the indicated north stored by the controller is compared with the corresponding angle during turning; a turning operation valve is controlled to turn the upper rotary body so that the initial angle is reached if the difference therebetween is larger than a predetermined angle; turning is stopped when the relative rotation angle between the direction of travel lever operation and the lower traveling unit is within a predetermined range and when the angle between the upper rotary body and the indicated north becomes within a predetermined range with respect to the corresponding initial angle; and the travel operation valve is controlled to make the lower traveling unit travel in the direction of travel lever operation.
- the operator can incline the travel lever in a direction in which the operator wishes to make the the vehicle travel, and can make the vehicle travel in this direction. Also, the operator can incline the travel lever in a selected traveling direction according to a desired speed to make the vehicle travel in the same direction at a speed proportional to the inclination angle. Further, the operator can easily make the vehicle travel in a selected direction without changing the intermediate attitude only by inclining one travel lever in the selected traveling direction, and there is no possibility of illusion with respect to the traveling direction, thus ensuring safe traveling.
- Figs. 1 to 6 are diagrams of a first embodiment of the present invention
- Fig. 1 is a diagram of the overall construction
- Fig. 2 is a diagram of the travel lever operating direction
- Figs. 3, 4, and 6 are diagrams of the relationship between the relative turning angle and the operating direction angle
- Fig. 5 is a flow chart of the arithmetic processing program.
- Figs. 7 to 9 are diagrams of a second embodiment of the present invention.
- Fig. 7 is a diagram of the overall construction;
- Fig. 8 is a diagram of the travel lever operating direction and the inclination angle; and
- Fig. 9 is a flow chart of the arithmetic processing program.
- Figs. 10 to 13 are diagrams of a third embodiment of the present invention.
- Fig. 10 is a diagram of the overall construction;
- Figs. 11 and 12 are diagrams of the relationship between the relative turning angle, the operating direction angle and the north direction angle; and
- Fig. 13 is a flow chart of the arithmetic processing program.
- Fig. 14 is a schematic diagram of the whole of a vehicle
- Fig. 15 is a diagram of the construction of a conventional travel controller
- Fig. 16 is a diagram of the direction in which the conventional vehicle travels.
- Fig. 1 shows the overall construction of the first embodiment.
- a vehicle body rotation encoder 3 is mounted on the center of rotation of an upper rotary body 1 rotatably and axially connected to a lower traveling unit 2 comprising a right track 6 having a right travel motor 7 and a left track 8 having a left travel motor 9, and one travel lever 10, such as that shown in Fig. 2, which has at its lower end a lever angle detector 5 and which is capable of being inclined in each of directions X, Y and an intermediate direction is provided in a cab 4 fixed on the upper rotary body 1.
- the vehicle body rotation encoder 3, the lever angle detector 5 and a controller 11 fixed on the upper rotary body 1 are connected by wiring.
- the controller 11 and pilot portions of a right travel operation valve 12 and a left travel operation valve 13 of an electromagnetic hydraulic pilot type provided in the upper rotary body 1 are connected by wiring.
- the right travel motor 7 and the right travel operation valve 12, and the left travel motor 9 and the left travel operation valve 13 are connected by pressure pipe lines, and pressure oil is supplied from an unillustrated hydraulic pressure generation source to these pipe lines.
- the center line of the upper rotary body 1 is indicated by BE and the forward direction thereof is indicated by B
- the center line of the lower traveling unit 2 is indicated by CD and the forward direction thereof is indicated by C
- the relative rotation angle between the upper rotary body 1 and the lower traveling unit 2 is represented by ⁇ .
- the angle between a straight line XX parallel to the center line BE of the upper rotary body 1 and passing through the center of the lever and the direction A in which the lever 10 is operated is represented by ⁇ .
- the angle ⁇ is positive when measured clockwise based on a segment CN in the direction C of the center line CD of the lower traveling unit 2, or it is negative, that is, expressed as - ⁇ when measured counterclockwise, and the angle ⁇ is positive when measured clockwise based on a segment BN, or it is negative, that is, expressed as - ⁇ when measured counterclockwise.
- the vehicle body rotation encoder 3 reads the relative angle ⁇ between the upper rotary body 1 and the lower traveling unit 2 and sends a signal to the controller 11, and the lever angle detector 5 reads the angle ⁇ of the direction in which the travel lever 10 is operated, and sends a signal to the controller 11.
- the controller 11 effects arithmetic operation of these signals, determines a turning direction in which the lower traveling unit 2 can be turned by a minimum angle to face in the direction in which the traveling lever 10 is operated, and sends signals to the travel operation valves 12 and 13 to make the lower traveling unit 2 effect a non-traveling turn.
- the direction C of the center line of the lower traveling unit 2 before turning is changed to a direction C', as shown in Fig. 4.
- the direction A in which the operation lever 10 is operated is correspondingly changed to a direction A', and the operator therefore returns the traveling lever 10 operating direction to the position A.
- This operation is continued until the angle ⁇ + ⁇ between the direction C and the direction A reaches a predetermined angle K.
- the controller 11 sends signals for stopping non-traveling turning and for starting forward or rearward traveling to the travel operation valves 12 and 13, thereby making the vehicle travel straight.
- step 100 If the travel lever 10 is not ON in step 100, commands are issued in steps 101 and 102 to stop forward/rearward traveling and non-traveling, so that the vehicle is stopped. If in step 100 the travel lever 10 is inclined in the selected traveling direction, the angles ⁇ and ⁇ are read in step 103, and examination is made in step 104 as to whether or not - 90° ⁇ ⁇ ⁇ + ⁇ ⁇ ⁇ 90° is established. If YES, examination is made in step 105 as to whether or not the absolute value of ⁇ + ⁇ is smaller than the predetermined angle K.
- a command is issued in step 110 to effect a leftward non-traveling turn by a minimum turning angle.
- the travel lever 10 is corrected as mentioned above, ⁇ and ⁇ are read, and the same operation is repeated until
- step 113 a rearward traveling direction command is issued to make the vehicle travel in the direction A because in this case the direction A in which the travel lever 10 is operated is opposite to the direction C of forward traveling of the lower traveling unit 2, that is, the angle therebetween is 180°.
- step 111 examination is made in step 114 as to whether or not 90° ⁇ ⁇ + ⁇ ⁇ ⁇ 180° is established. If YES, a command is issued in step 115 to effect a leftward non-traveling turn by a minimum turning angle. If NO, a command is issued in step 116 to effect a rightward non-traveling turn, and the same operation is repeated until 180° -
- rotation in the minimum turning direction is effected. However, needless to say, rotation in the opposite direction may be effected by changing the determination.
- a vehicle travel controller and a control method for the same can be obtained whereby the operator can effect a non-traveling turn of the lower traveling unit to make the same face in the traveling direction by only inclining one travel lever in the traveling direction and can make the vehicle travel in the direction in which the travel lever is inclined, and which are improved in operation facility, free from occurrence of any illusion with respect to the traveling direction and therefore improved in terms of safety.
- Fig. 7 shows the overall construction of the second embodiment.
- One travel lever 8 such as that shown in Fig. 8 is provided in the cab 4 fixed on the upper rotary body 1.
- a variable capacity hydraulic pump 27 supplies pressure oil to the right travel motor 7 via a flow rate control type right travel operation valve 20, and return oil is returned to a hydraulic tank 29 via the right travel operation valve 20.
- the right travel operation valve 20 is composed of electromagnetic valves 22a and 22b, and poppet valves 23, 24, 25, and 26.
- the electromagnetic valve 22a controls the poppet valves 23 and 24 to control the flow rate of a pipe line 7a to the travel motor.
- the electromagnetic valve 22b controls the poppet valves 25 and 26 to control the flow rate of a pipe line 7b to the travel motor and, hence, the number of revolutions of the motor during reverse rotation. Pilot portions of the electromagnetic valves 22a and 22b and a controller 21 are connected by wiring.
- a left travel operation valve 29 and the left travel motor 9 are constructed in the same manner.
- the center line of the upper rotary body 1 is indicated by BE and the forward direction is indicated by B
- the center line of the lower traveling unit 2 is indicated by CD and the forward direction is indicated by C
- the relative rotation angle between the upper rotary body 1 and the lower traveling unit 2 is represented by ⁇ .
- the angle between a straight line XX parallel to the center line BE of the upper rotary body 1 and passing through the center of the lever and the direction A in which the lever 10 is operated is represented by ⁇
- the angle of inclination of the travel lever 10 is represented by ⁇ .
- the vehicle body rotation encoder 3 reads the relative angle ⁇ between the upper rotary body 1 and the lower traveling unit 2 and sends a signal to the controller 21, and the lever angle detector 5 reads the angle ⁇ of the direction in which the travel lever 10 is operated and the inclination angle ⁇ , and sends a signal to the controller 21.
- the controller 21 effects arithmetic operation of these signals, determines a turning direction in which the lower traveling unit 2 can be turned by a minimum angle to face in the direction in which the traveling lever 10 is operated, determines a control flow rate from the inclination angle ⁇ , and sends signals to the electromagnetic valves 22a and 22b of the right and left travel operation valves 20 and 29, and the electromagnetic valves 22a and 22b control the poppet valves 23, 24, 25, and 26 in response to these signals to rotate the travel motors 7 and 9 in designated directions at designated speeds, thereby making the lower traveling unit effect a non-traveling turn.
- the direction C of the center line of the lower traveling unit 2 before turning is changed to a direction C', as shown in Fig.
- the direction A in which the operation lever 10 is operated is correspondingly changed to a direction A', and the operator therefore returns the travel lever 10 operating direction to the position A.
- This operation is continued until the angle ⁇ + ⁇ between the direction C and the direction A reaches a predetermined angle K.
- the controller 21 sends signals for stopping non-traveling turning and for starting forward or rearward traveling and control flow rate signals to the travel operation valves 20 and 29, thereby making the lower traveling unit 2 travel straight at the designated speed and in the designated direction.
- step 200 If the travel lever 10 is not ON in step 200, commands are issued in steps 201 and 202 to stop forward/rearward traveling and non-traveling, so that the vehicle is stopped. If in step 200 the travel lever 10 is inclined in the selected traveling direction by the inclination angle ⁇ , the angles ⁇ , ⁇ , ⁇ are read in step 203, and examination is made in step 204 as to whether or not - 90° ⁇ ⁇ ⁇ + ⁇ ⁇ ⁇ 90° is established. If YES, examination is made in step 205 as to whether or not the absolute value of ⁇ + ⁇ is smaller than the predetermined angle K.
- ⁇ ⁇ K is established and a control flow rate command are issued in step 209.
- ⁇ , ⁇ , g corrected with respect to the direction in which the operation lever 10 is operated are read as described above, and the same operation is repeated until
- step 213 a rearward traveling direction command and a control flow rate command are issued to make the vehicle travel in the direction A at the designated speed because in this case the direction A in which the travel lever 10 is operated is opposite to the direction C of forward traveling of the lower traveling unit 2, that is, the angle therebetween is 180°.
- step 211 a command for a leftward non-traveling turn by a minimum turning angle and a control flow rate command are issued in step 215.
- step 116 If NO, a rightward non-traveling turn command and a control flow rate command are issued in step 116, and the same operation is repeated until 180° -
- a vehicle travel controller and a control method for the same can be obtained whereby the operator can make the lower traveling unit to effect non-traveling turning at the desired speed so as to face the traveling direction by only inclining one travel lever in the traveling direction according to the desired speed and can make the vehicle travel at the desired speed in the direction in which the travel lever is inclined, and which controller and method are improved in operation facility, free from occurrence of any illusion with respect to the traveling direction and therefore improved in terms of safety.
- FIG. 10 shows the overall construction of this embodiment.
- a gyro compass 30 always indicating the geomagnetic north and serving to detect the angle of the upper rotary body 1 from the forward direction B is mounted on the upper rotary body 1.
- the vehicle body encoder 3, the lever angle detector 5 and the gyro compass 30 are respectively connected by wiring to a controller 31 mounted on the upper rotary body 1.
- a rotating operation valve 34, a right travel operation valve 12 and a left travel operation valve 13 of an electromagnetic hydraulic pilot type mounted on the upper rotary body 1 are respectively connected to the controller 31 by wiring.
- the right travel operation valve 12 and the left travel operation valve 13 are respectively connected by pressure pipe lines to the right travel motor 7 and the left travel motor mounted in lower travel unit 2, the rotating operation valve 34 and a rotating motor 33 are also connected, and pressure oil is supplied from an unillustrated hydraulic pressure generation source to these pipe lines.
- the center line of the upper rotary body 1 is indicated by BE and the forward direction is indicated by B
- the center line of the lower traveling unit is indicated by CD and the forward direction is indicated by C
- the angle between BE and CD i.e., the relative rotation angle between the upper rotary body 1 and the lower traveling unit 2
- the north direction indicated by the gyro compass 30 is indicated by N
- the angle between N and BE is represented by ⁇ .
- the angle between a straight line XX parallel to the center line BE of the upper rotary body 1 and passing through the center of the lever angle detector 5 and the traveling direction A of the travel lever 10 is represented by ⁇ .
- the angle ⁇ is positive when measured clockwise based on a segment CO in the direction C of the center line CD of the lower traveling unit 2, the angle ⁇ is positive when measured clockwise based on a segment BO, the angle ⁇ is positive when measured clockwise based on NO in the north direction indicated by the gyro compass 30.
- the vehicle body rotation encoder 3 detects the relative angle ⁇ between the upper rotary body 1 and the lower traveling unit 2 and sends a signal to the controller 31, the lever angle detector 5 detects the angle ⁇ of the direction in which the travel lever 10 is operated, and sends a signal to the controller 31, and the gyro compass 30 detects the angle ⁇ between the upper rotary body 1 and the indicated north and sends a signal to the controller 30.
- the controller 31 stores the initial angle as ⁇ 0 and effects arithmetic operation to determine a turning direction in which the lower traveling unit 2 can be turned by a minimum angle to face in the direction in which the traveling lever 10 is operated, and sends signals to the travel operation valves 12 and 13 to make the lower traveling unit 2 effect a non-traveling turn.
- the upper rotary body 1 is turned integrally therewith, so that the angle ⁇ t between the upper rotary body 1 and the indicated north becomes different from the initial angle ⁇ 0.
- the controller 31 receives the signal from the gyro compass 30 and calculates the difference between ⁇ t and ⁇ 0, and, if this value is larger than a predetermined value K2, sends a signal to the rotating operation valve 34 to rotate the upper rotary body 1 in a direction such that ⁇ t is reduced to ⁇ 0. That is, the upper rotary body 1 is rotated in the direction opposite to the direction of rotation of non-traveling turning of the lower traveling unit 2.
- between traveling direction of the travel lever 7 and the center line of the lower traveling unit 2 becomes smaller than a predetermined value K1, non-traveling turning of the lower traveling unit 2 is stopped.
- ⁇ , ⁇ , and ⁇ t (the value of ⁇ at an arbitrary time) are read in step 311. If this is a first operation (step 312), ⁇ t is set to ⁇ 0 (the value of ⁇ at an initial stage of travel lever operation) and stored, and examination is made in step 314 as to whether or not the value of ⁇ + ⁇ is 0 to 90° or 270 to 360°.
- Fig. 11 shows an example in which 0 ⁇ ⁇ ⁇ + ⁇ ⁇ ⁇ 90° or 270° ⁇ ⁇ ⁇ + ⁇ ⁇ ⁇ 360°.
- step 315 determination is made in step 315 as to whether or not
- step 322 or 326 determination is made as to whether or not the value
- a command is thereby issued in step 324 or 328 to turn the upper rotary body 1 so that ⁇ t becomes closer to ⁇ 0.
- the above operations are repeated and, if it is determined in step 315 that
- determination is made as to whether or not the value
- ⁇ ⁇ K2 is established, forward traveling is started in step 332.
- Fig. 12 shows an example in which 0 ⁇ ⁇ ⁇ + ⁇ ⁇ ⁇ 90° or 270° ⁇ ⁇ ⁇ + ⁇ ⁇ ⁇ 360° is not established in step 314. In this case, the operations of steps 250 to 358 and steps 360 to 364 subsequent to step 340 are the same as in the above, and description for them will not be repeated.
- a vehicle travel controller and a control method for the same can be obtained whereby the operator can easily perform turning in a selected direction without changing the intermediate attitude only by inclining one travel lever in the selected traveling direction, and which are improved in operation facility, free from occurrence of any illusion with respect to the traveling direction and therefore improved in terms of safety.
- the present invention is effective as a vehicle travel controller and a control method for the same whereby the operator can easily make the vehicle travel in any direction selected without any illusion, and is suitable for a controller and a method for controlling travel of an industrial vehicle, more specifically, a construction vehicle such as a hydraulic power shovel.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
- Forklifts And Lifting Vehicles (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP108422/89 | 1989-04-27 | ||
| JP1108422A JPH02285114A (ja) | 1989-04-27 | 1989-04-27 | 車輛の走行制御装置およびその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0423372A1 true EP0423372A1 (de) | 1991-04-24 |
| EP0423372A4 EP0423372A4 (en) | 1992-06-24 |
Family
ID=14484366
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19900907382 Withdrawn EP0423372A4 (en) | 1989-04-27 | 1990-04-26 | Driving control device for vehicle and control method therefor |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP0423372A4 (de) |
| JP (1) | JPH02285114A (de) |
| KR (1) | KR920700337A (de) |
| WO (1) | WO1990012930A1 (de) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4301745C1 (de) * | 1993-01-23 | 1994-06-23 | Orenstein & Koppel Ag | Verfahren zur Steuerung des Lenkverhaltens einer mobilen Baumaschine sowie Lenkung für die Baumaschine |
| FR2701968A1 (fr) * | 1993-02-24 | 1994-09-02 | Screg Routes & Travaux | Dispositif de détermination en continu des déplacements d'une partie d'un engin de travaux publics sur un terrain. |
| EP0622263A3 (de) * | 1993-04-27 | 1995-05-31 | Shimadzu Corp | Gabelstapler-Steuergerät. |
| WO2015185699A1 (en) * | 2014-06-06 | 2015-12-10 | Cnh Industrial Italia S.P.A. | System for coordinating the direction of travel of a hydraulic machine with the operator's position |
| GB2549150A (en) * | 2016-04-08 | 2017-10-11 | Caterpillar Inc | Control system and method for a machine |
| EP3487750A4 (de) * | 2016-07-20 | 2020-03-25 | Prinoth Ltd | Raupenfahrzeug mit rotierender oberstruktur und verfahren dafür |
| EP3770335A4 (de) * | 2018-03-23 | 2021-05-05 | Sumitomo Heavy Industries, Ltd. | Schaufel |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITTO20021068A1 (it) * | 2002-12-06 | 2004-06-07 | Fiat Kobelco Construction Machinery S P A | Veicolo su ruote provvisto di un assale oscillante attorno ad un asse longitudinale. |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE948846C (de) * | 1955-01-19 | 1956-09-06 | Demag Baggerfabrik G M B H | Steuereinrichtung zur wahlweisen Anwendung bei hydraulisch angetriebenen und gesteuerten Raupen- und Reifenfahrzeugen |
| FR1380607A (fr) * | 1963-10-14 | 1964-12-04 | Commande inversable de direction pour engin de travaux publics | |
| US3990527A (en) * | 1975-05-21 | 1976-11-09 | Kabushiki Kaisha Komatsu Seisakusho | Steering apparatus for a vehicle of the type having revolving upper body with respect to a lower body thereof |
| JPS5748044A (en) * | 1980-09-04 | 1982-03-19 | Komatsu Ltd | Travelling lever device of slewable hydraulic excavator |
| JPS61141365U (de) * | 1985-02-19 | 1986-09-01 | ||
| JPH0762804B2 (ja) * | 1985-11-02 | 1995-07-05 | 日立建機株式会社 | 作業機構の駆動制御装置 |
| JPH0765326B2 (ja) * | 1986-03-11 | 1995-07-19 | セイレイ工業株式会社 | バツクホ−の掘削作業部の回動制御機構 |
-
1989
- 1989-04-27 JP JP1108422A patent/JPH02285114A/ja active Pending
-
1990
- 1990-04-26 KR KR1019900702684A patent/KR920700337A/ko not_active Withdrawn
- 1990-04-26 EP EP19900907382 patent/EP0423372A4/en not_active Withdrawn
- 1990-04-26 WO PCT/JP1990/000544 patent/WO1990012930A1/ja not_active Ceased
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4301745C1 (de) * | 1993-01-23 | 1994-06-23 | Orenstein & Koppel Ag | Verfahren zur Steuerung des Lenkverhaltens einer mobilen Baumaschine sowie Lenkung für die Baumaschine |
| FR2701968A1 (fr) * | 1993-02-24 | 1994-09-02 | Screg Routes & Travaux | Dispositif de détermination en continu des déplacements d'une partie d'un engin de travaux publics sur un terrain. |
| EP0622263A3 (de) * | 1993-04-27 | 1995-05-31 | Shimadzu Corp | Gabelstapler-Steuergerät. |
| WO2015185699A1 (en) * | 2014-06-06 | 2015-12-10 | Cnh Industrial Italia S.P.A. | System for coordinating the direction of travel of a hydraulic machine with the operator's position |
| US10344454B2 (en) | 2014-06-06 | 2019-07-09 | Cnh Industrial America Llc | System for coordinating the direction of travel of a hydraulic machine with the operator's position |
| US10323389B2 (en) | 2016-04-08 | 2019-06-18 | Caterpillar Inc. | Control system and method for a machine |
| EP3228760A1 (de) * | 2016-04-08 | 2017-10-11 | Caterpillar Inc. | Fahrsteuerungssystem und -verfahren für eine baumaschine |
| GB2549150A (en) * | 2016-04-08 | 2017-10-11 | Caterpillar Inc | Control system and method for a machine |
| GB2549150B (en) * | 2016-04-08 | 2019-10-09 | Caterpillar Inc | Control system and method for a machine |
| EP3487750A4 (de) * | 2016-07-20 | 2020-03-25 | Prinoth Ltd | Raupenfahrzeug mit rotierender oberstruktur und verfahren dafür |
| US11001986B2 (en) | 2016-07-20 | 2021-05-11 | Prinoth Ltd. | Tracked vehicle with rotating upper structure and processes therefor |
| US11708685B2 (en) | 2016-07-20 | 2023-07-25 | Prinoth Ltd. | Tracked vehicle with rotating upper structure and processes therefor |
| EP3770335A4 (de) * | 2018-03-23 | 2021-05-05 | Sumitomo Heavy Industries, Ltd. | Schaufel |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0423372A4 (en) | 1992-06-24 |
| WO1990012930A1 (fr) | 1990-11-01 |
| KR920700337A (ko) | 1992-02-19 |
| JPH02285114A (ja) | 1990-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6589945B2 (ja) | 建設機械 | |
| US5201177A (en) | System for automatically controlling relative operational velocity of actuators of construction vehicles | |
| JP7217655B2 (ja) | 作業車両 | |
| EP0423372A1 (de) | Kontrollanordnung für fahrzeuglenkvorrichtung und steuerungsverfahren dazu | |
| WO2021065135A1 (ja) | 制御システム、作業車両の制御方法、および、作業車両 | |
| JPS62181969A (ja) | 車両の4輪操舵装置 | |
| WO2018179113A1 (ja) | 作業車両 | |
| US12601140B2 (en) | Automatically steering a mobile machine | |
| JPS62203891A (ja) | 連結型作業機の走行制御装置 | |
| JP2024136838A (ja) | 作業機械 | |
| JPH07189914A (ja) | 可変容量型油圧ポンプの制御装置 | |
| JPH1163218A (ja) | 電子制御式hst装置 | |
| JPH0418165B2 (de) | ||
| JP3182804B2 (ja) | 油圧走行式作業機の走行駆動装置 | |
| KR20230119332A (ko) | 선박용 자동조타장치 | |
| JPS62214406A (ja) | パワ−シヨベルの制御方法 | |
| JPH02229331A (ja) | 車輛の走行制御装置およびその制御方法 | |
| JPS62146775A (ja) | 車両の4輪操舵装置 | |
| JPS62214407A (ja) | パワーショベルの制御装置 | |
| JPH0569850A (ja) | 四輪操舵車両の操舵システム | |
| KR102836800B1 (ko) | 선박용 조타기 조립체 및 조타 제어 방법 | |
| WO2020090864A1 (ja) | ハンドル角制御装置 | |
| US12441398B2 (en) | Work vehicle steering control apparatus | |
| JPS6286235A (ja) | パワ−シヨベルにおける作業機の制御装置 | |
| KR102418899B1 (ko) | 유압모터를 이용하여 주행하는 농업용 작업기의 조향 유지장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE FR GB |
|
| 17P | Request for examination filed |
Effective date: 19910422 |
|
| A4 | Supplementary search report drawn up and despatched |
Effective date: 19920508 |
|
| AK | Designated contracting states |
Kind code of ref document: A4 Designated state(s): DE FR GB |
|
| 17Q | First examination report despatched |
Effective date: 19930824 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 19940104 |