EP1118580A1 - Einrichtung zur automatischen Regelung der Zugkraft eines Seiles für ein Pistenpflegegerät - Google Patents
Einrichtung zur automatischen Regelung der Zugkraft eines Seiles für ein Pistenpflegegerät Download PDFInfo
- Publication number
- EP1118580A1 EP1118580A1 EP01200199A EP01200199A EP1118580A1 EP 1118580 A1 EP1118580 A1 EP 1118580A1 EP 01200199 A EP01200199 A EP 01200199A EP 01200199 A EP01200199 A EP 01200199A EP 1118580 A1 EP1118580 A1 EP 1118580A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- setpoint
- rope
- winch
- control unit
- sensor elements
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/40—Control devices
- B66D1/48—Control devices automatic
- B66D1/50—Control devices automatic for maintaining predetermined rope, cable, or chain tension, e.g. in ropes or cables for towing craft, in chains for anchors; Warping or mooring winch-cable tension control
- B66D1/505—Control devices automatic for maintaining predetermined rope, cable, or chain tension, e.g. in ropes or cables for towing craft, in chains for anchors; Warping or mooring winch-cable tension control electrical
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Road Paving Machines (AREA)
- Lifting Devices For Agricultural Implements (AREA)
- Carriers, Traveling Bodies, And Overhead Traveling Cranes (AREA)
- Earth Drilling (AREA)
- Control And Safety Of Cranes (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
- Figur 1
- ein Schaubild der erfindungsgemäßen Einrichtung angewandt auf ein Pistenpflegegerät bekannter Art,
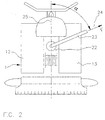
- Figur 2
- schematisch ein Pistenpflegegerät mit Überkopfseile,
- Figur 3
- ein Diagramm zur Bestimmung eines Zugkraftwertes,
- Figur 4
- ein Diagramm zur Bestimmung der maximal zulässigen Zugkraft, und
- Figur 5
- schematisch einen Regelkreis zum Vergleich eines Istwertes der Zugkraft und Regelung des Istwertes auf den Sollwert.
Wie in Figur 3 gezeigt, wird abhängig vom Druck p im Fahrantrieb und vom Korrekturwert K1 der vom Fahrer über das Potentiometer einstellbar ist, der Zugkraftwert F* wie folgt unter Bezugnahme auf Figur 3 bestimmt:
Claims (5)
- Einrichtung zur automatischen Einstellung und Regelung der Zugkraft des Seils einer Überkopfwinde für ein Pistenpflegegerät, umfassend eine Steuer- und Regeleinheit, die mit einem steuerbaren Windenantrieb verbunden ist, eine Auswerteeinrichtung, die mit Sensorelementen und mit der Steuer- und Regeleinheit verbunden ist, dadurch gekennzeichnet, dass die Sensorelemente Drucksensoren sind, welche den an einem Wechselventil (16, 20) mit höchstem Wert anstehenden Druck erfassen, das zwischen den Förderleitungen (6, 8) von rechtsseitigen und linksseitigen Antrieben in einer ersten Fahrtrichtung bzw. in einer gegenüber der letzteren entgegengesetzten Fahrtrichtung geschaltet ist, wobei in der Auswerteeinrichtung ein Algorithmus abgelegt ist, der aufgrund des durch die Drucksensoren gewonnenen Druckwertes einen Sollwert errechnet, der den Windenantrieb über die Regeleinheit steuert.
- Einrichtung nach Anspruch 1, dadurch gekennzeichnet, dass der durch die Regeleinheit gewonnene Sollwert mit einem mittels eines am Zugseil anliegenden Kraftbolzen gemessenen Istwert verglichen wird und die Regeleinheit die Zugkraft auf den Sollwert regelt.
- Einrichtung nach den vorstehenden Ansprüchen, dadurch gekennzeichnet, dass eines der Sensorelemente ein Drehwinkelgeber ist, der den Winkel α des Seils (24) bzw. des Windenauslegers (23) bezüglich der Fahrzeuglängsachse (25) bestimmt, wobei ein zum Winkel α proportionales Signal gebildet wird, das der Auswerteeinheit zur Berechnung der maximal zulässigen Zugkraft zugeführt wird.
- Einrichtung nach den vorstehenden Ansprüchen, dadurch gekennzeichnet, dass eines der Sensorelemente durch einen am Seil anliegenden Kraftbolzen zur Bildung eines höchst zulässigen Kraftzugsollwertes gebildet wird.
- Einrichtung nach den vorstehenden Ansprüchen, dadurch gekennzeichnet, dass mit der Regeleinheit ein vom Fahrer des Pistenpflegegerätes einstellbares Potentiometer verbunden ist, das die Eingabe eines Korrekturwertes des ermittelten Zugkraftsollwertes zur Erhöhung oder Verringerung desselben erlaubt.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT2000BZ000005A IT1316116B1 (it) | 2000-01-21 | 2000-01-21 | Dispositivo per la impostazione e regolazione automatica della forzadi trazione di una fune di un verricello sopratesta per una macchina |
| ITBZ200005 | 2000-01-21 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1118580A1 true EP1118580A1 (de) | 2001-07-25 |
| EP1118580B1 EP1118580B1 (de) | 2004-09-22 |
Family
ID=11440841
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP01200199A Expired - Lifetime EP1118580B1 (de) | 2000-01-21 | 2001-01-19 | Einrichtung zur automatischen Regelung der Zugkraft eines Seiles für ein Pistenpflegegerät |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6585232B2 (de) |
| EP (1) | EP1118580B1 (de) |
| JP (1) | JP4780837B2 (de) |
| AT (1) | ATE276966T1 (de) |
| DE (1) | DE50103695D1 (de) |
| IT (1) | IT1316116B1 (de) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10261944A1 (de) * | 2002-12-17 | 2004-07-01 | Kässbohrer Geländefahrzeug AG | Verfahren zur Steuerung einer Seilwinde eines Pistenpflegefahrzeugs und Pistenpflegefahrzeug |
| DE102010049984A1 (de) * | 2010-10-19 | 2012-04-19 | Kässbohrer Geländefahrzeug AG | Verfahren zur Steuerung einer Seilwinde eines Kettenfahrzeugs und Pistenraupe |
| CN102491173A (zh) * | 2011-12-12 | 2012-06-13 | 中联重科股份有限公司 | 起重机以及起重机用闭式卷扬负功率控制系统 |
| IT201700064293A1 (it) * | 2017-06-09 | 2018-12-09 | Prinoth Spa | Gruppo verricello di ausilio alla movimentazione di un veicolo cingolato e relativo metodo di controllo |
| IT202100032639A1 (it) | 2021-12-24 | 2023-06-24 | Prinoth Spa | Gruppo verricello di ausilio alla movimentazione di un veicolo cingolato e relativo metodo di controllo |
| EP4242162A1 (de) | 2022-03-10 | 2023-09-13 | Kässbohrer Geländefahrzeug AG | Verfahren zur steuerung einer windenanordnung einer pistenraupe, vorrichtung zur durchführung des verfahrens und pistenraupe |
| AT527871A1 (de) * | 2024-01-09 | 2025-07-15 | Lechner Konrad | Forstwirtschaftliches Nutzfahrzeug |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITBZ20030005A1 (it) * | 2003-01-30 | 2004-07-31 | High Technology Invest Bv | Dispositivo pressore per la conduzione di fune in sistemi di trasporto a trazione di fune. |
| DE102005031076B4 (de) * | 2005-06-27 | 2007-11-29 | Kässbohrer Geländefahrzeug AG | Pistenpflegefahrzeug mit Seilzugmoment-Kompensation |
| ITBZ20050051A1 (it) * | 2005-09-29 | 2007-03-30 | High Technology Invest Bv | Dispositivo antiscarrucolamento per funi di impianti funiviari. |
| ITMI20070157U1 (it) * | 2007-04-20 | 2008-10-21 | Rolic Invest Sarl | Seggiovia |
| ITMI20070835A1 (it) * | 2007-04-20 | 2008-10-21 | Rolic Invest Sarl | Impianto di trasporto a fune e metodo di azionamento dello stesso |
| ITMI20071618A1 (it) | 2007-08-03 | 2009-02-04 | Rolic Invest Sarl | Impianto di trasporto a fune e metodo di azionamento dello stesso |
| ITMI20072071A1 (it) * | 2007-10-26 | 2009-04-27 | Rolic Invest Sarl | Impianto di trasporto a fune e metodo di azionamento dello stesso |
| EP2075172A1 (de) * | 2007-12-28 | 2009-07-01 | Rolic Invest Sarl | Seilbahnsystem mit Tragkabeln und einem getrennten Zugkabel |
| CA2739409A1 (en) * | 2008-10-03 | 2010-04-08 | Schlumberger Canada Limited | Configurable hydraulic system |
| IT1395098B1 (it) | 2009-07-09 | 2012-09-05 | Rolic Invest Sarl | Unita' di trasporto per impianti di trasporto a fune |
| IT1395737B1 (it) | 2009-08-04 | 2012-10-19 | Rolic Invest Sarl | Dispostivo di richiamo di un sedile per skilift |
| US8613426B1 (en) | 2009-12-14 | 2013-12-24 | L.E. Myers Co. | Power line puller control package |
| IT1401120B1 (it) | 2010-07-14 | 2013-07-12 | Rolic Invest Sarl | Scambio per impianto di trasporto a fune e impianto di trasporto a fune comprendente tale scambio. |
| CN102424330B (zh) * | 2011-08-19 | 2013-12-18 | 三一汽车起重机械有限公司 | 一种起重机及其收钩系统、方法 |
| EP3067309B1 (de) | 2015-03-10 | 2019-08-07 | HAWE Hydraulik SE | Steuerventil für ein hydraulisches Aggregat und hydraulisches System mit einem entsprechenden Steuerventil |
| US10633230B2 (en) * | 2018-04-10 | 2020-04-28 | Goodrich Corporation | Integrated hoist maintenance and method of hoist operation |
| IT202200003908A1 (it) | 2022-03-02 | 2023-09-02 | Prinoth Spa | Veicolo cingolato per la preparazione di piste da sci e metodo di guida del veicolo cingolato |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4108264A (en) * | 1975-12-29 | 1978-08-22 | Kabushiki Kaisha Komatsu Seisakusho | Cable take-up device for electric drive vehicle |
| EP0761890A1 (de) * | 1995-09-07 | 1997-03-12 | MDP Meccanica del Piave S.p.A. | Sicherheitsvorrichtung für Kraftfahrzeuge mit einer Manövrierwinde auf stark geneigter Ebene |
| DE19647169A1 (de) * | 1996-11-13 | 1998-05-28 | Samsung Heavy Ind | Steuervorrichtung für Fahrsystem bei Baufahrzeugen |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3032321A (en) * | 1960-01-29 | 1962-05-01 | Plumettaz Sa | Control devices for powered winches |
| US3940110A (en) * | 1974-04-12 | 1976-02-24 | Kenro Motoda | Lifting apparatus |
| GB1589769A (en) * | 1976-12-14 | 1981-05-20 | Secretary Industry Brit | System for controlling the position of a tethered floating vessel |
| US4187681A (en) * | 1978-08-28 | 1980-02-12 | Bucyrus-Erie Company | Hydrostatic winch |
| US4448398A (en) * | 1982-03-01 | 1984-05-15 | Garlock Equipment Company | Winch control system |
| JPH063850Y2 (ja) * | 1990-06-25 | 1994-02-02 | 株式会社トーメン | ゲレンデ整備装置 |
| JP3305834B2 (ja) * | 1993-10-18 | 2002-07-24 | セイレイ工業株式会社 | 自走式撒氷装置の油圧回路 |
| JPH07113564A (ja) * | 1993-10-18 | 1995-05-02 | Seirei Ind Co Ltd | 自走式撒氷装置 |
| JP3508662B2 (ja) * | 1998-12-25 | 2004-03-22 | コベルコ建機株式会社 | 油圧駆動ウィンチの制御方法および同装置 |
| US6382595B1 (en) * | 2000-07-26 | 2002-05-07 | Schlumberger Technology Corporation | Differential hydrostatic transmission system |
-
2000
- 2000-01-21 IT IT2000BZ000005A patent/IT1316116B1/it active
-
2001
- 2001-01-17 US US09/766,459 patent/US6585232B2/en not_active Expired - Lifetime
- 2001-01-19 DE DE50103695T patent/DE50103695D1/de not_active Expired - Fee Related
- 2001-01-19 EP EP01200199A patent/EP1118580B1/de not_active Expired - Lifetime
- 2001-01-19 JP JP2001011350A patent/JP4780837B2/ja not_active Expired - Lifetime
- 2001-01-19 AT AT01200199T patent/ATE276966T1/de active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4108264A (en) * | 1975-12-29 | 1978-08-22 | Kabushiki Kaisha Komatsu Seisakusho | Cable take-up device for electric drive vehicle |
| EP0761890A1 (de) * | 1995-09-07 | 1997-03-12 | MDP Meccanica del Piave S.p.A. | Sicherheitsvorrichtung für Kraftfahrzeuge mit einer Manövrierwinde auf stark geneigter Ebene |
| DE19647169A1 (de) * | 1996-11-13 | 1998-05-28 | Samsung Heavy Ind | Steuervorrichtung für Fahrsystem bei Baufahrzeugen |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10261944A1 (de) * | 2002-12-17 | 2004-07-01 | Kässbohrer Geländefahrzeug AG | Verfahren zur Steuerung einer Seilwinde eines Pistenpflegefahrzeugs und Pistenpflegefahrzeug |
| EP1431236A3 (de) * | 2002-12-17 | 2005-04-27 | Kässbohrer Geländefahrzeug AG | Verfahren zur Steuerung einer Seilwinde eines Pistenpflegefahrzeugs und Pistenpflegefahrzeug |
| US7165758B2 (en) | 2002-12-17 | 2007-01-23 | Kaessbohrer Gelaendefahrzeug Ag | Snow-trail grooming vehicle having a cable winch thereon and a method for controlling the cable winch |
| DE102010049984A1 (de) * | 2010-10-19 | 2012-04-19 | Kässbohrer Geländefahrzeug AG | Verfahren zur Steuerung einer Seilwinde eines Kettenfahrzeugs und Pistenraupe |
| EP2444356A1 (de) * | 2010-10-19 | 2012-04-25 | Kässbohrer Geländefahrzeug AG | Verfahren zur Steuerung einer Seilwinde eines Kettenfahrzeugs und Pistenraupe |
| CN102491173A (zh) * | 2011-12-12 | 2012-06-13 | 中联重科股份有限公司 | 起重机以及起重机用闭式卷扬负功率控制系统 |
| CN102491173B (zh) * | 2011-12-12 | 2014-04-02 | 中联重科股份有限公司 | 起重机以及起重机用闭式卷扬负功率控制系统 |
| WO2018225031A1 (en) * | 2017-06-09 | 2018-12-13 | Prinoth S.P.A. | Winch assembly for assisting the movement of a tracked vehicle and control method thereof |
| IT201700064293A1 (it) * | 2017-06-09 | 2018-12-09 | Prinoth Spa | Gruppo verricello di ausilio alla movimentazione di un veicolo cingolato e relativo metodo di controllo |
| CN109019379A (zh) * | 2017-06-09 | 2018-12-18 | 普瑞诺斯股份公司 | 履带式车辆的绞车组件及其控制方法和履带式车辆 |
| CN109019379B (zh) * | 2017-06-09 | 2021-05-25 | 普瑞诺斯股份公司 | 履带式车辆的绞车组件及其控制方法和履带式车辆 |
| RU2771072C2 (ru) * | 2017-06-09 | 2022-04-26 | ПРИНОТ С.п.А. | Узел лебедки для помощи в перемещении гусеничного транспортного средства и способ управления им |
| US11753283B2 (en) | 2017-06-09 | 2023-09-12 | Prinoth S.P.A. | Winch assembly for assisting the movement of a tracked vehicle and control method thereof |
| IT202100032639A1 (it) | 2021-12-24 | 2023-06-24 | Prinoth Spa | Gruppo verricello di ausilio alla movimentazione di un veicolo cingolato e relativo metodo di controllo |
| EP4201867A1 (de) | 2021-12-24 | 2023-06-28 | PRINOTH S.p.A. | Windenanordnung zur unterstützung der bewegung eines kettenfahrzeugs und zugehöriges steuerungsverfahren |
| EP4242162A1 (de) | 2022-03-10 | 2023-09-13 | Kässbohrer Geländefahrzeug AG | Verfahren zur steuerung einer windenanordnung einer pistenraupe, vorrichtung zur durchführung des verfahrens und pistenraupe |
| DE102022202414A1 (de) | 2022-03-10 | 2023-09-14 | Kässbohrer Geländefahrzeug Aktiengesellschaft | Verfahren zur Steuerung einer Windenanordnung einer Pistenraupe, Vorrichtung zur Durchführung des Verfahrens und Pistenraupe |
| AT527871A1 (de) * | 2024-01-09 | 2025-07-15 | Lechner Konrad | Forstwirtschaftliches Nutzfahrzeug |
Also Published As
| Publication number | Publication date |
|---|---|
| IT1316116B1 (it) | 2003-03-28 |
| DE50103695D1 (de) | 2004-10-28 |
| US6585232B2 (en) | 2003-07-01 |
| JP4780837B2 (ja) | 2011-09-28 |
| US20010017366A1 (en) | 2001-08-30 |
| EP1118580B1 (de) | 2004-09-22 |
| ITBZ20000005A1 (it) | 2001-07-21 |
| ATE276966T1 (de) | 2004-10-15 |
| JP2001248125A (ja) | 2001-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1118580B1 (de) | Einrichtung zur automatischen Regelung der Zugkraft eines Seiles für ein Pistenpflegegerät | |
| DE10145588A1 (de) | Verfahren und Vorrichtung zur Steuerung einer Kupplung | |
| EP1818245B1 (de) | Anhänger und Verfahren zum Antreiben eines Anhängers | |
| DE3317091A1 (de) | Drehmoment-regelsystem mit drehzahlbegrenzung und regelverfahren fuer einen hydrostatischen hilfsantrieb | |
| DE202013012756U1 (de) | Stabilisierung einer Forstarbeitseinheit | |
| EP2444356B1 (de) | Verfahren zur Steuerung einer Seilwinde eines Kettenfahrzeugs und Pistenraupe | |
| EP2377999A1 (de) | Vorderantrieb eines Straßenfertigers und Verfahren zur Steuerung desselben | |
| EP1431236B1 (de) | Verfahren zur Steuerung einer Seilwinde eines Pistenpflegefahrzeugs und Pistenpflegefahrzeug | |
| DE60112716T2 (de) | Verfahren und vorrichtung zur regelung des antriebsschlupfes für ein fahrzeug mit hydraulischem antrieb | |
| DE10219270C1 (de) | Landwirtschaftliches Nutzfahrzeug und Verfahren zur Schlupfregelung | |
| EP3427560B1 (de) | Anhängevorrichtung | |
| DE60315779T2 (de) | Fahrzeuglenkung | |
| DE3126184A1 (de) | Anordnung zum begrenzen unkontrollierter abknickbewegungen im gelenk zwischen fahrzeugeinheiten von gelenkfahrzeugen, insbesondere gelenkomnibussen | |
| EP1826420B1 (de) | Verfahren sowie Vorrichtung zur Regelung eines Antriebssystems | |
| DE102011116528A1 (de) | Verfahren zur Drehmomentregelung einer hydrostatischen Antriebseinheit | |
| DE202020107297U1 (de) | Steuersystem für einen hydrostatischen Antrieb | |
| DE3321443A1 (de) | Vibrationswalze mit leistungsbegrenzungsvorrichtung | |
| DE102023202657A1 (de) | Verfahren zur ansteuerung eines hydrostatischen antriebs | |
| EP4242162B1 (de) | Verfahren zur steuerung einer windenanordnung einer pistenraupe, pistenraupe mit vorrichtung zur durchführung des verfahrens | |
| EP2432310A1 (de) | Anordnung zur hubregelung eines hubwerkzeugs eines fahrzeugs und verfahren zur hubregelung | |
| EP3067309B1 (de) | Steuerventil für ein hydraulisches Aggregat und hydraulisches System mit einem entsprechenden Steuerventil | |
| EP4384733B1 (de) | Verfahren zum anfahren in einem hydrostatischen antrieb mit bremse | |
| DE10006407C2 (de) | Hydrostatischer Antrieb für eine Winde | |
| DE102021120647B4 (de) | Gleiskettenfahrzeug mit Gleiskettenspanner | |
| WO2002078994A1 (de) | Verfahren zum steuern einer selbstfahrenden baumaschine und selbstfahrende baumaschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT CH DE FR IT LI |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 20011019 |
|
| AKX | Designation fees paid |
Free format text: AT CH DE FR IT LI |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT CH DE FR IT LI |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 50103695 Country of ref document: DE Date of ref document: 20041028 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: KELLER & PARTNER PATENTANWAELTE AG |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050802 |
|
| ET | Fr: translation filed | ||
| 26N | No opposition filed |
Effective date: 20050623 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: NEW ADDRESS: EIGERSTRASSE 2 POSTFACH, 3000 BERN 14 (CH) |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 17 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20200123 Year of fee payment: 20 Ref country code: IT Payment date: 20200103 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20200127 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20200128 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PFA Owner name: LEITNER S.P.A., IT Free format text: FORMER OWNER: LEITNER S.P.A., IT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK07 Ref document number: 276966 Country of ref document: AT Kind code of ref document: T Effective date: 20210119 |